
An Investigation of Extended-Dimension Embedded CKF-SLAM Based on the Akaike Information Criterion


Abstract
1. Introduction
- (1)
- After conventional singular-value decomposition, smaller singular values can lead to larger errors, causing solution instability. This paper proposes and uses the Akaike information criterion (AIC) to determine the truncation threshold for singular values.
- (2)
- Considering the inherent flaws of non-additive noise in the system and the spherical radial volume criterion in the standard CKF algorithm, an embedded approach is applied to the extended-dimensional CKF algorithm.
- (3)
- An AIC-based extended embedded CKF algorithm is proposed, with detailed time and measurement update equations provided.
2. SLAM
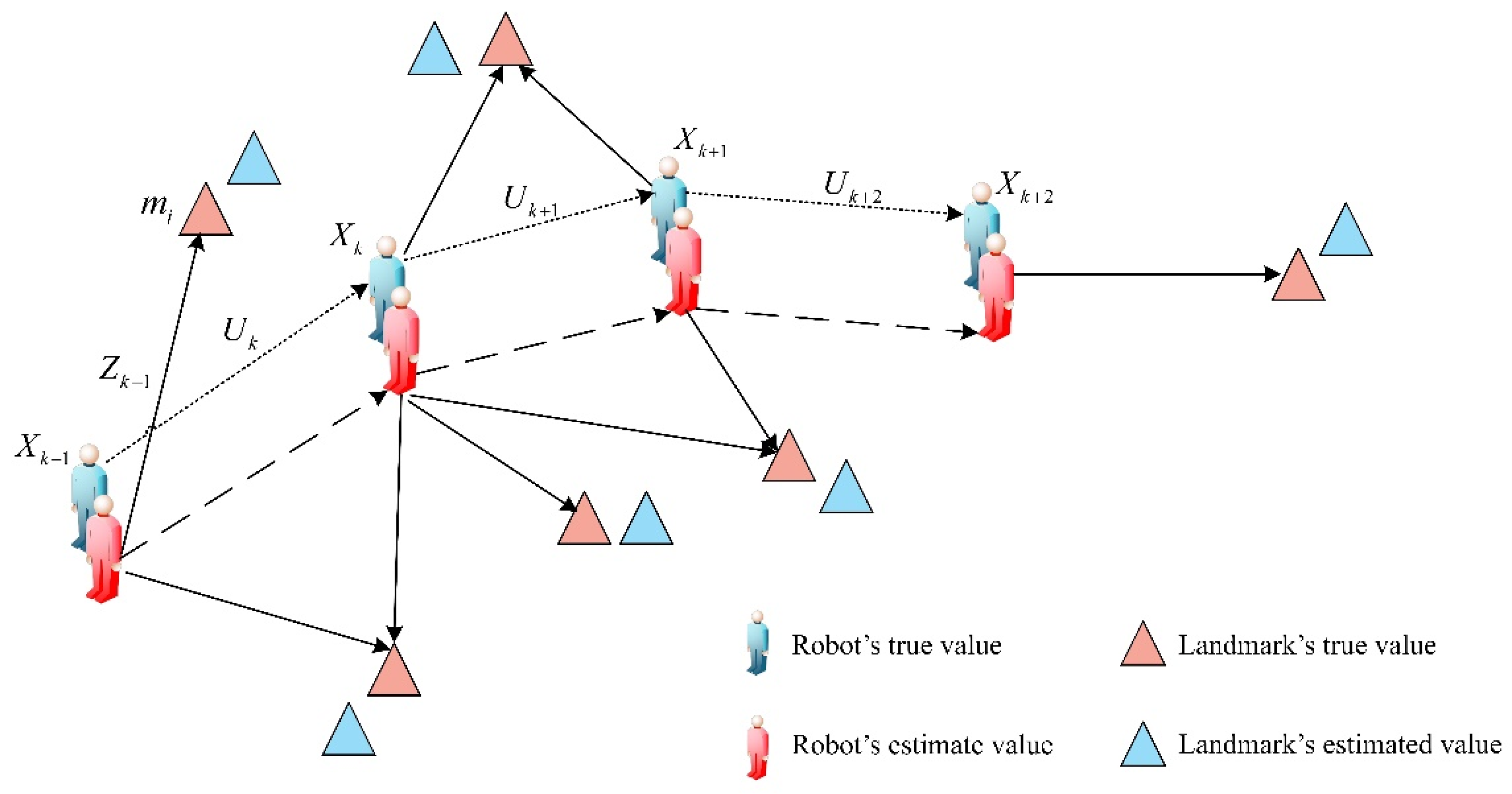
2.1. Description of the SLAM
2.2. SLAM Probability Model
3. CKF
3.1. CKF Based on Singular-Value Decomposition
3.2. Truncated Singular-Value Method
3.3. Selection of Truncation Threshold
4. Extended Dimension and Embedding CKF Method
4.1. Embedded Cubature Kalman Filter
4.2. Extended-Dimension Embedded Cubature Kalman Filter
4.3. The Method of TSVD-AEACKF
5. Experimental and Analysis
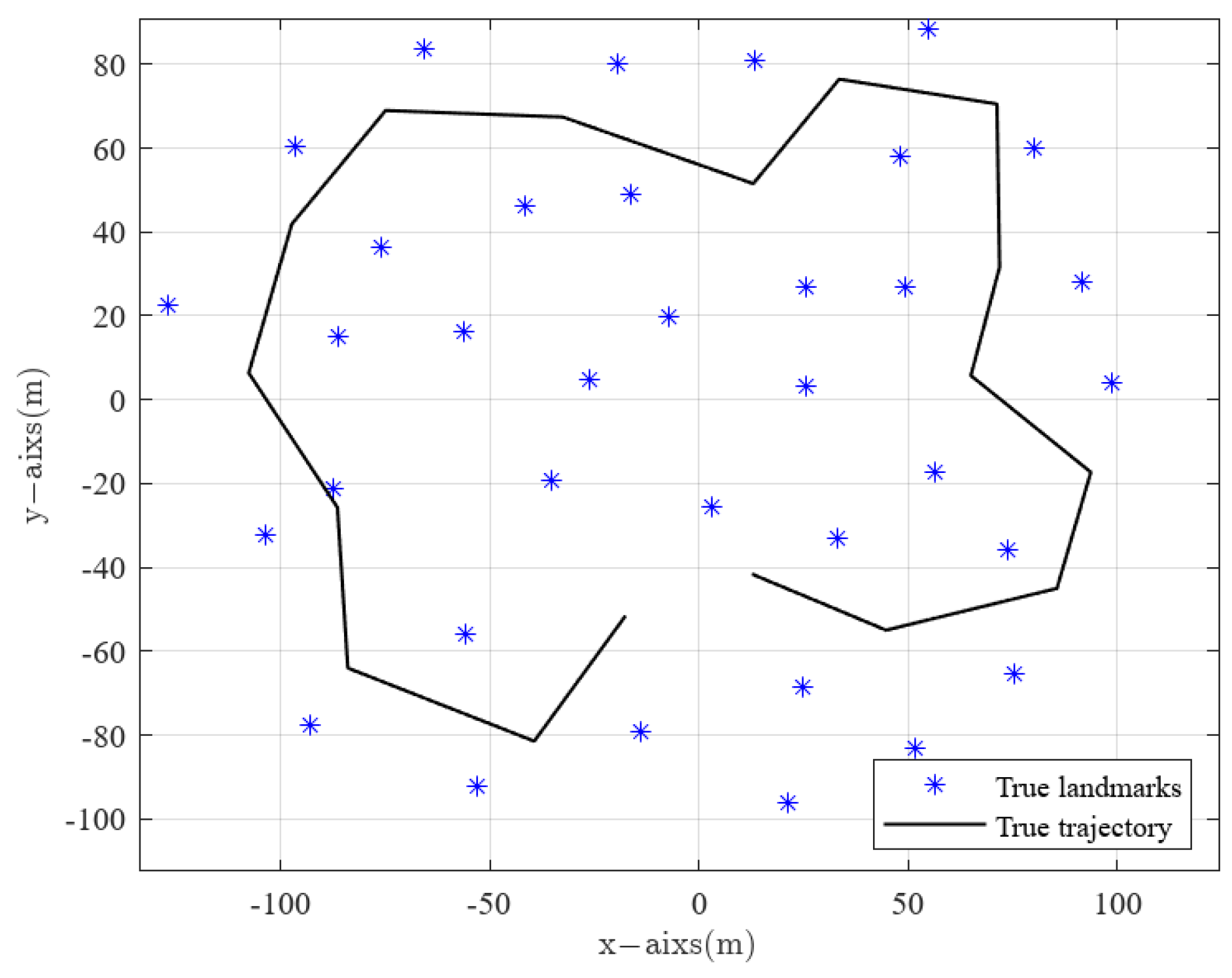
5.1. Simulation Experimental Parameters
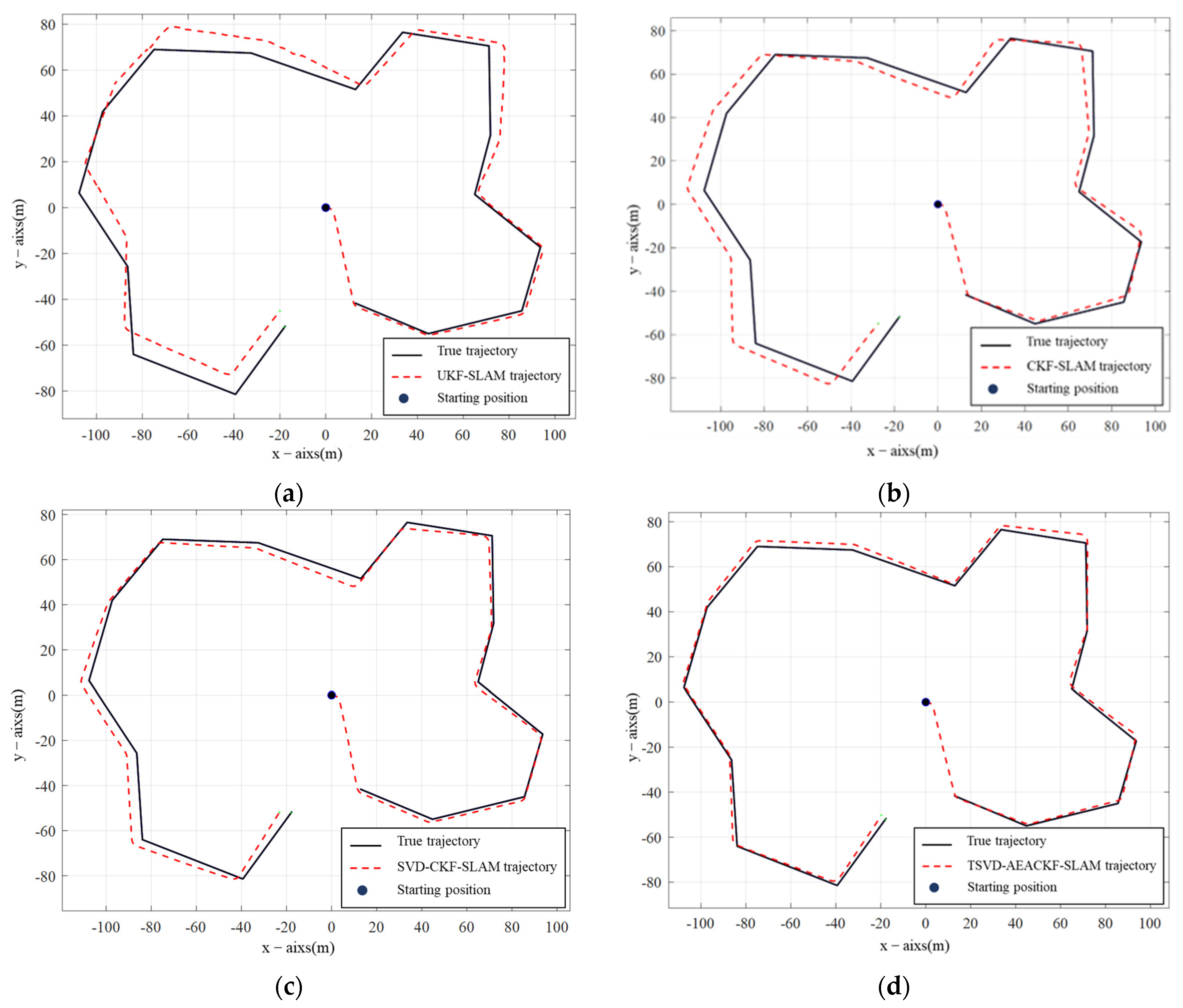
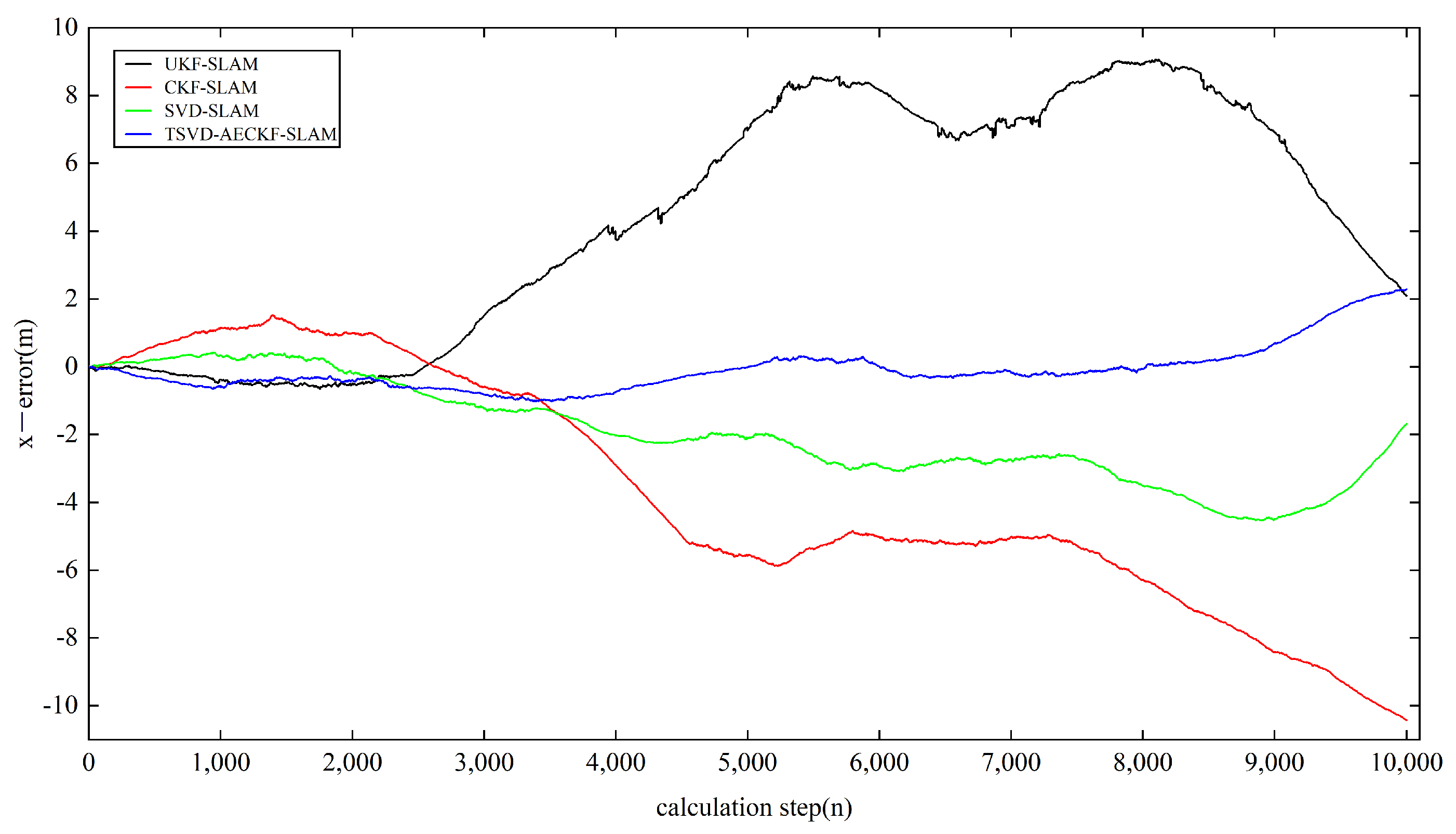
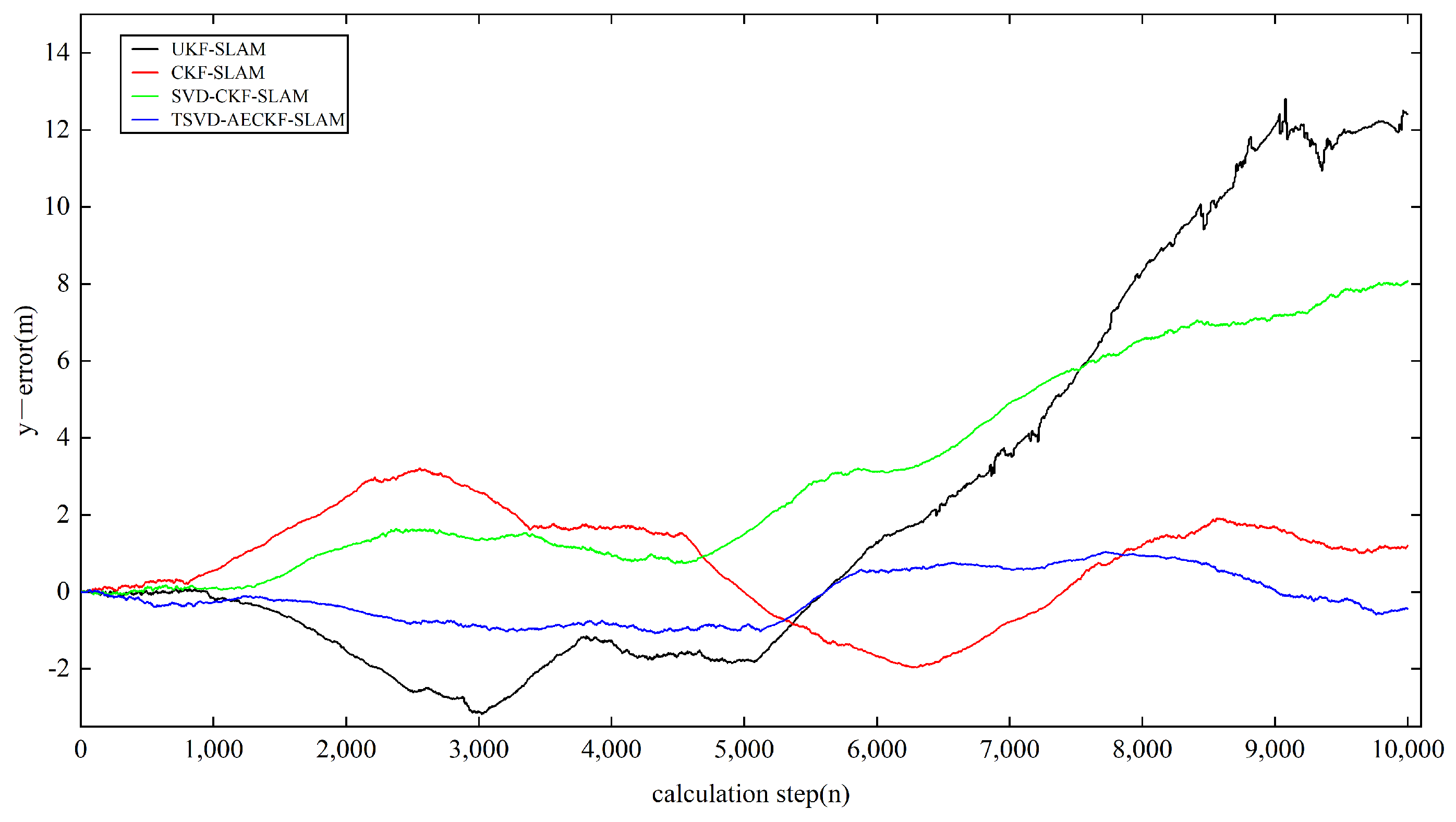
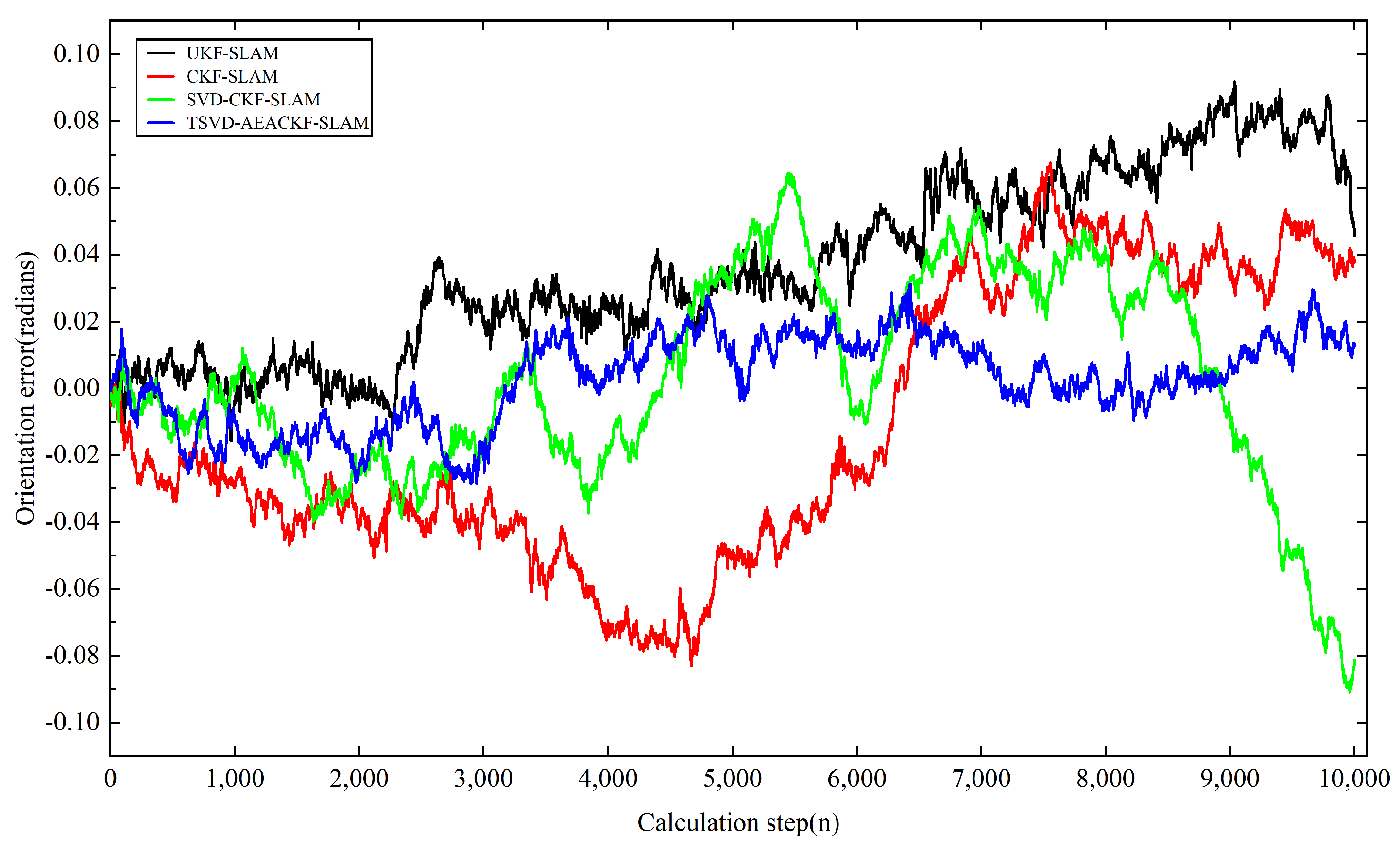
5.2. Analysis of Estimation Errors
5.3. Analysis of RMSE and Average Running Time
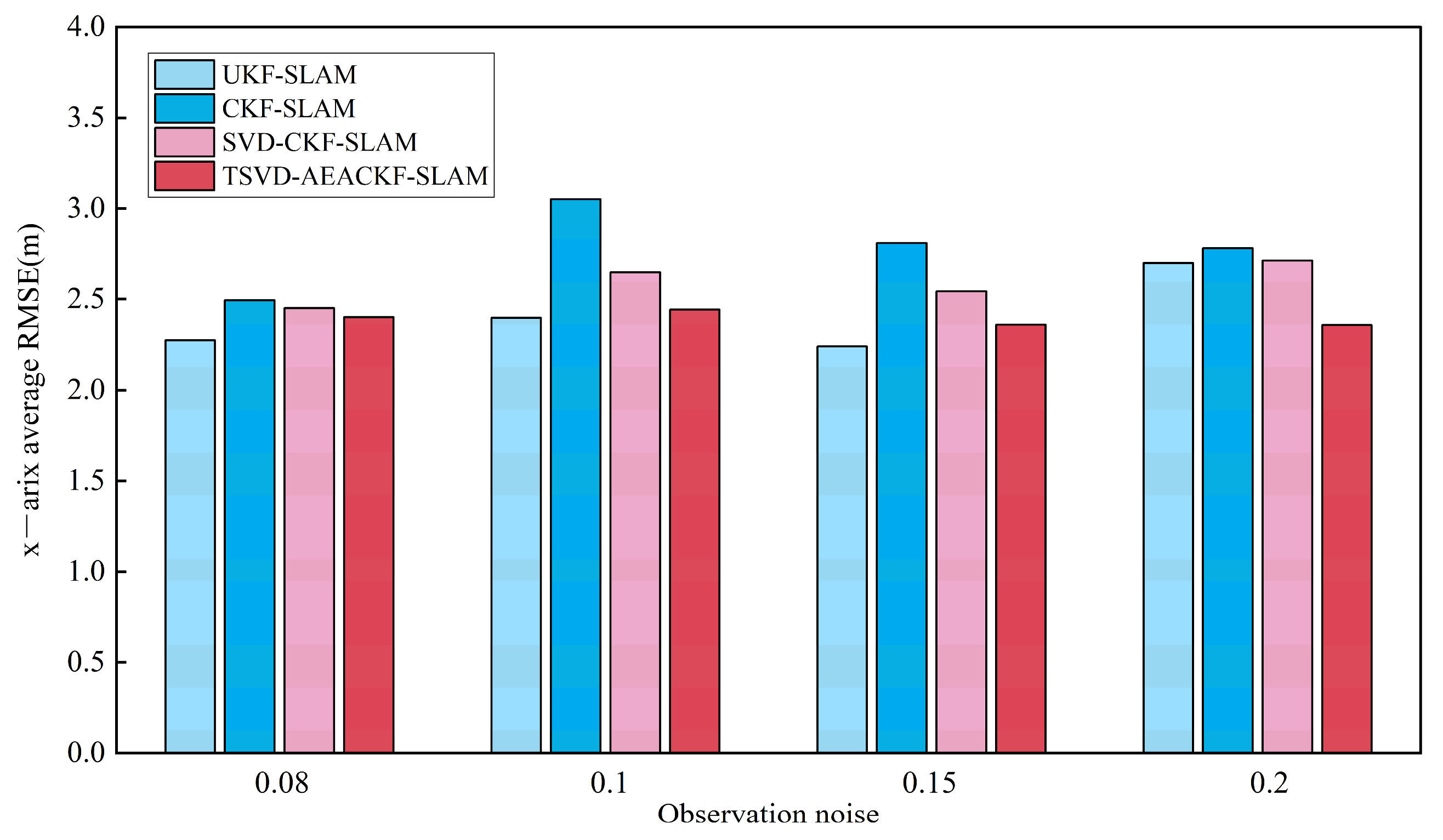
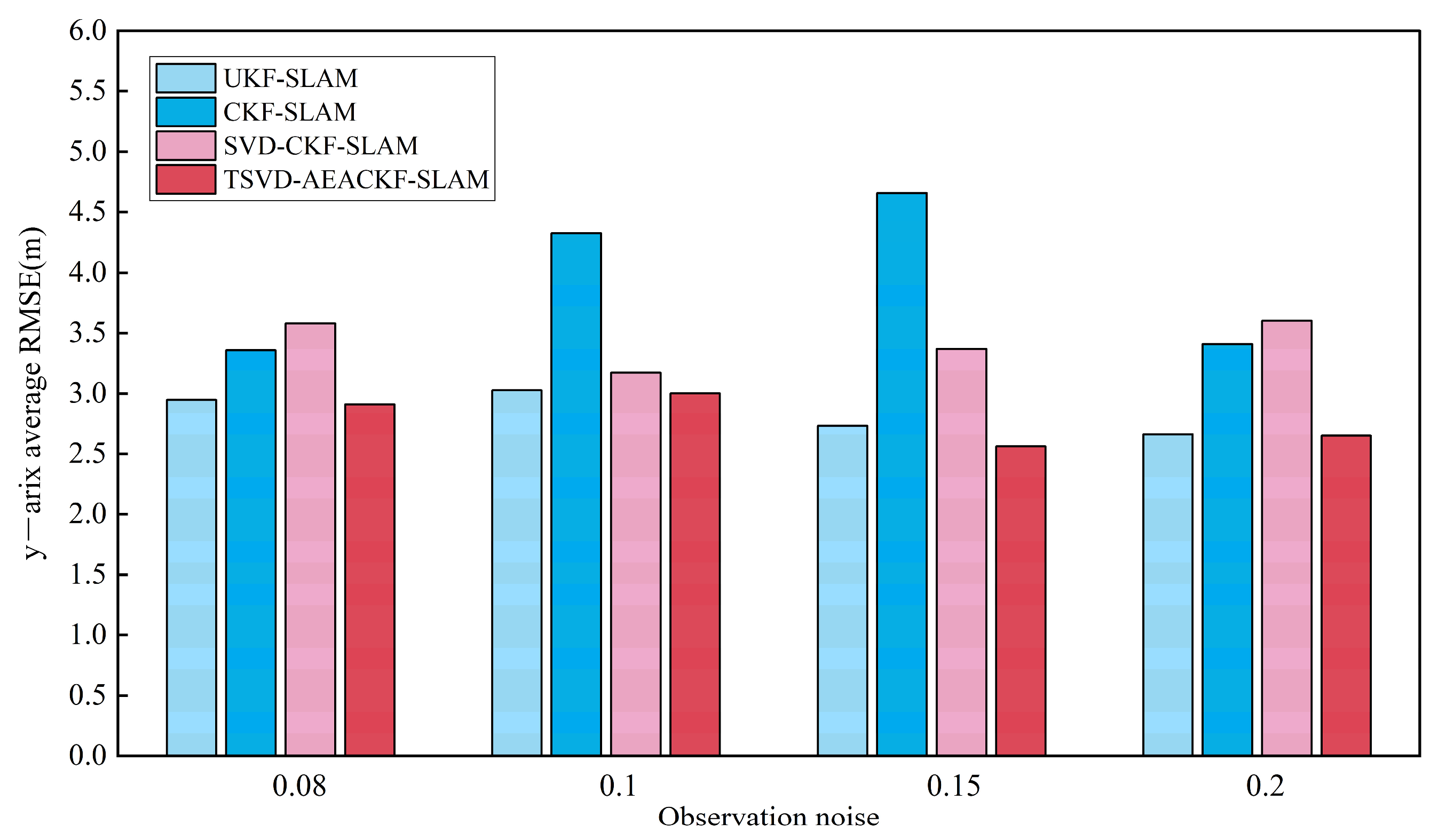
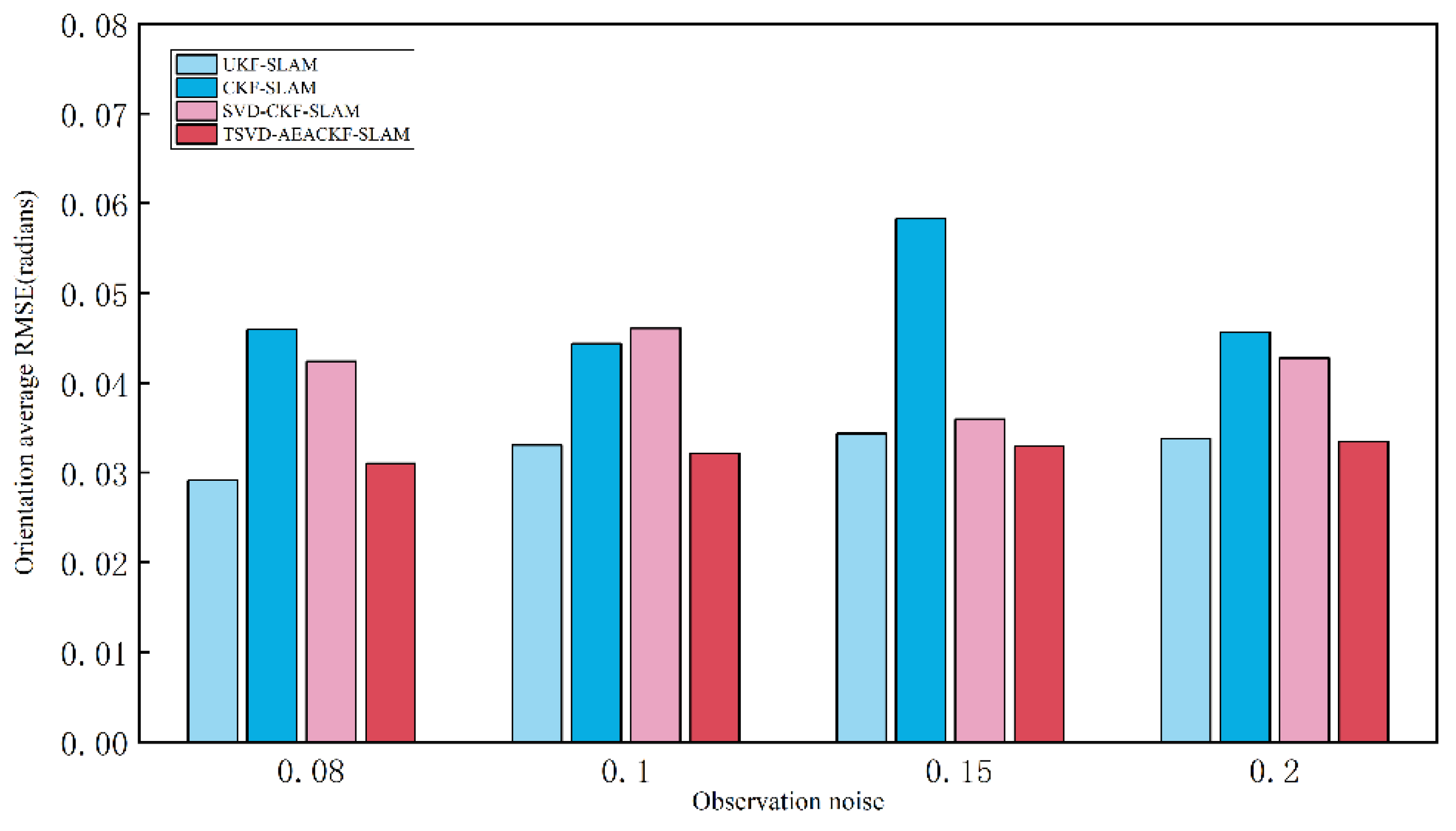
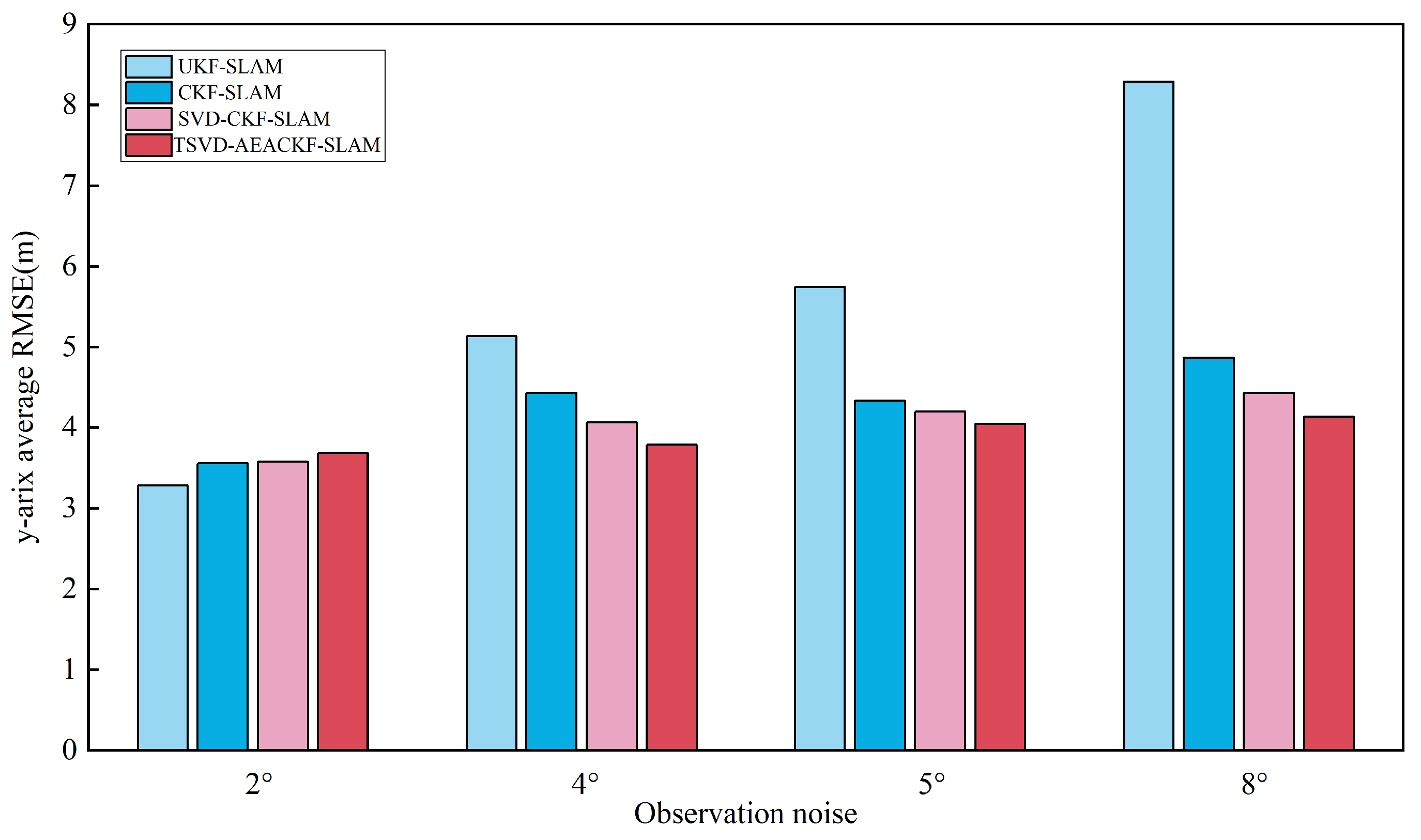
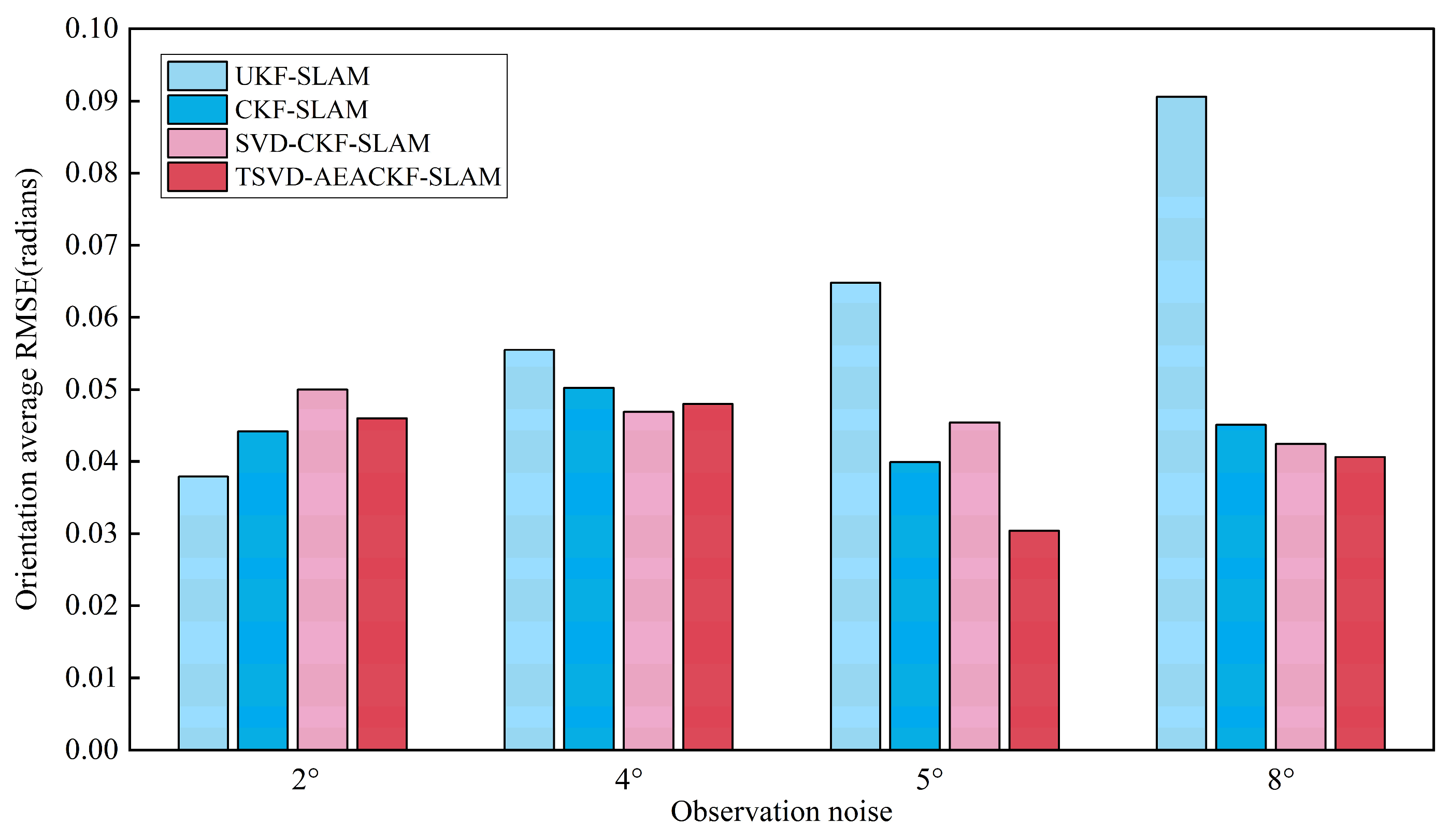
5.4. Analysis of Algorithm Accuracy Under Different Noise Levels
5.5. Validation with the Real-World Car Park Dataset
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ge, Q.; Shen, T.; Chen, S.; Wen, C. Carrier Tracking Estimation Analysis by Using the Extended Strong Tracking Filtering. IEEE Trans. Ind. Electron. 2017, 64, 1415–1424. [Google Scholar] [CrossRef]
- Ge, Q.; Li, H.; Wen, C. Deep Analysis of Kalman Filtering Theory for Engineering Applications. J. Command. Control 2019, 5, 167–180. [Google Scholar]
- Shi, L. Kalman Filtering over Graphs: Theory and Applications. IEEE Trans. Autom. Control 2009, 54, 2230–2234. [Google Scholar] [CrossRef]
- Wang, G. Research on SLAM Fusion of Vision and LiDAR in Indoor Dynamic Environment. Master’s Thesis, Xi’an University of Technology, Xi’an, China, 2023. [Google Scholar]
- Doucet, A.; Godsill, S.; Andrieu, C. On Sequential Monte-Carlo Sampling Methods for Bayesian Filtering. Stat. Comput. 2000, 10, 197–208. [Google Scholar] [CrossRef]
- Dissanayake, G.; Huang, S.; Wang, Z.; Ranasinghe, R. A Review of Recent Developments in Simultaneous Localization and Mapping. In Proceedings of the IEEE International Conference on Industrial Information Systems, Galle, Sri Lanka, 29 July–1 August 2011; pp. 477–482. [Google Scholar] [CrossRef]
- Chen, S.; Ho, D. Information-Based Distributed Extended Kalman Filter with Dynamic Quantization via Communication Channels. Neurocomputing 2022, 469, 251–260. [Google Scholar] [CrossRef]
- Zhou, J.; Knedlik, S.; Loffeld, O. INS/GPS Tightly-Coupled Integration Using Adaptive Unscented Particle Filter. J. Navig. 2010, 63, 491–511. [Google Scholar] [CrossRef]
- Garcia, R.; Pardal, P.; Kuga, H.; Zanardi, M. Nonlinear Filtering for Sequential Spacecraft Attitude Estimation with Real Data: Cubature Kalman Filter, Unscented Kalman Filter, and Extended Kalman Filter. Adv. Space Res. 2019, 63, 1038–1050. [Google Scholar] [CrossRef]
- Hernandez-Gonzalez, M.; Basin, M.; Hernández-Vargas, E. Discrete-Time High-Order Neural Network Identifier Trained with High-Order Sliding Mode Observer and Unscented Kalman Filter. Neurocomputing 2021, 424, 172–178. [Google Scholar] [CrossRef]
- Hao, G.; Sun, S. Distributed Fusion Cubature Kalman Filters for Nonlinear Systems. Int. J. Robust Nonlinear Control 2019, 29, 5979–5991. [Google Scholar] [CrossRef]
- Wang, J.; Hao, G. Robust estimation algorithm based on prior probability statistics. Int. J. Robust Nonlinear Control 2021, 31, 7957–7970. [Google Scholar] [CrossRef]
- Holmes, G.K.; Murray, D.W. A square root unscented kalman filter for visual monoSLAM. In Proceedings of the IEEE International Conference on Robotics Automation, Pasadena, CA, USA, 19–23 May 2008; pp. 3710–3716. [Google Scholar] [CrossRef]
- Huang, G.P.; Mourikis, A.I.; Roumeliotis, S.I. A quadratic complexity observability-constrained unscented kalman filter for SLAM. IEEE Trans. Robot. 2013, 29, 1226–1243. [Google Scholar] [CrossRef]
- Zhou, J.; Li, T.; Chen, B.; Yu, L. Intermediate-Variable-Based Kalman Filter for Linear Time-Varying Systems with Unknown Inputs. Int. J. Robust Nonlinear Control 2022, 32, 2453–2464. [Google Scholar] [CrossRef]
- Arasaratnam, I.; Haykin, S. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar] [CrossRef]
- Zhang, X.; Guo, C. Root Mean Square Embedded Cubature Kalman Filter. Control Theory Appl. 2013, 30, 1116–1121. [Google Scholar]
- Liu, H.; Miao, C.; Wu, W. Square Root Embedded Cubature Kalman Particle Filter Algorithm. J. Nanjing Univ. Technol. 2015, 39, 471–476. [Google Scholar]
- Sun, C.; Zhang, Y.; Wang, G.; Gao, W. A New Variational Bayesian Adaptive Extended Kalman Filter for Cooperative Navigation. Sensors 2018, 18, 2538. [Google Scholar] [CrossRef] [PubMed]
- Zhong, W. Research on Optimization Methods for Multi-AUV Collaborative Navigation and Positioning Performance in Complex Environments. Master’s Thesis, Harbin Engineering University, Harbin, China, 2020. [Google Scholar]
- Durrant-Whyte, H.; Bailey, T. Simultaneous Localization and Mapping (SLAM): Part I. IEEE Robot. Autom. Mag. 2006, 13, 99–110. [Google Scholar] [CrossRef]
- Zhao, W. Research on SLAM Algorithm for Robots in Complex Scenes. Master’s Thesis, Harbin Engineering University, Harbin, China, 2019. [Google Scholar]
- Kudriashov, A.; Buratowski, T.; Giergiel, M.; Małka, P. SLAM Techniques Application for Mobile Robot in Rough Terrain. In Service Robotics and Mechatronics; Ceccarelli, M., Ed.; Springer International Publishing: Cham, Switzerland, 2020; pp. 477–482. [Google Scholar]
- Tang, M. Research on SLAM Algorithm Based on Nonlinear Bayesian Filtering. Master’s Thesis, Dalian University of Technology, Dalian, China, 2022. [Google Scholar]
- Julier, S.; Uhlmann, J.; Durrant-Whyte, H.F. A New Approach for Filtering Nonlinear Systems. IEEE Trans. Autom. Control 2000, 45, 477–482. [Google Scholar] [CrossRef]
- Bailey, T.; Durrant-Whyte, H. Simultaneous Localization and Mapping (SLAM): Part II. IEEE Robot. Autom. Mag. 2006, 13, 108–117. [Google Scholar] [CrossRef]
- Strang, G. Linear Algebra and Its Applications, 4th ed.; Brooks Cole: Boston, MA, USA, 2012. [Google Scholar]
- Austin, D. We Recommend a Singular Value Decomposition. Feature Column 2009. Available online: https://www.ams.org/publicoutreach/feature-column/fcarc-svd (accessed on 23 October 2024).
- Zhang, F.; Yang, Q. Research on Singular Value Truncation Threshold Algorithm for Ill conditioned Problems. Math. Pract. Underst. 2021, 51, 239–246. [Google Scholar]
- Julier, S.J.; Uhlmann, J.K. A General Method for Approximating Nonlinear Transformations of Probability Distributions. Proc. IEEE 2004, 92, 401–422. [Google Scholar] [CrossRef]
- Chandra, K.P.B.; Gu, D.; Postlethwaite, I. Extended Kalman Filtering for Nonlinear Systems. In Proceedings of the 19th World Congress of the International Federation of Automatic Control, Milan, Italy, 28 August–2 September 2011; Volume 44, pp. 2121–2125. [Google Scholar] [CrossRef]
- Australian Centre for Field Robotics. Car Park Dataset[DB/OL]. (10 June 2008) [13 November 2015]. Available online: http://www-personal.acfr.usyd.edu.au/nebot/car_park.htm (accessed on 6 June 2024).
- Available online: http://www.acfr.usyd.edu.au/homepages/academic/tbailey/software.html (accessed on 11 June 2024).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Time (s) |
|---|---|
| UKF-SLAM | 2.9839 |
| CKF-SLAM | 13.0582 |
| SVD-CKD-SLAM | 15.0007 |
| TSVD-AEACKF-SLAM | 6.6689 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, H.; Chen, Y.; Song, W.; Wang, L. An Investigation of Extended-Dimension Embedded CKF-SLAM Based on the Akaike Information Criterion. Sensors 2024, 24, 7800. https://doi.org/10.3390/s24237800
Xu H, Chen Y, Song W, Wang L. An Investigation of Extended-Dimension Embedded CKF-SLAM Based on the Akaike Information Criterion. Sensors. 2024; 24(23):7800. https://doi.org/10.3390/s24237800
Chicago/Turabian StyleXu, Hanghang, Yijin Chen, Wenhui Song, and Lianchao Wang. 2024. "An Investigation of Extended-Dimension Embedded CKF-SLAM Based on the Akaike Information Criterion" Sensors 24, no. 23: 7800. https://doi.org/10.3390/s24237800
APA StyleXu, H., Chen, Y., Song, W., & Wang, L. (2024). An Investigation of Extended-Dimension Embedded CKF-SLAM Based on the Akaike Information Criterion. Sensors, 24(23), 7800. https://doi.org/10.3390/s24237800