
Node Classification Method Based on Hierarchical Hypergraph Neural Network


Abstract
1. Introduction
- 1.
- We propose the HCHG model. This novel approach combines hierarchical structures with hypergraph neural networks to effectively capture local and global relationships in node classification and link prediction tasks, improving performance on complex graphs.
- 2.
- The HCHG model introduces a hierarchical construction method, using the Louvain community detection algorithm to build higher-order relationship networks, enhancing the model’s ability to represent complex network structures.
- 3.
- Our method performs excellently on six classification datasets and three link prediction datasets, achieving significant performance improvements across multiple tasks.
2. Related Work
3. Motivation and Background
4. Hierarchical Hypergraph Neural Networks
4.1. Hierarchical Structure Partitioning
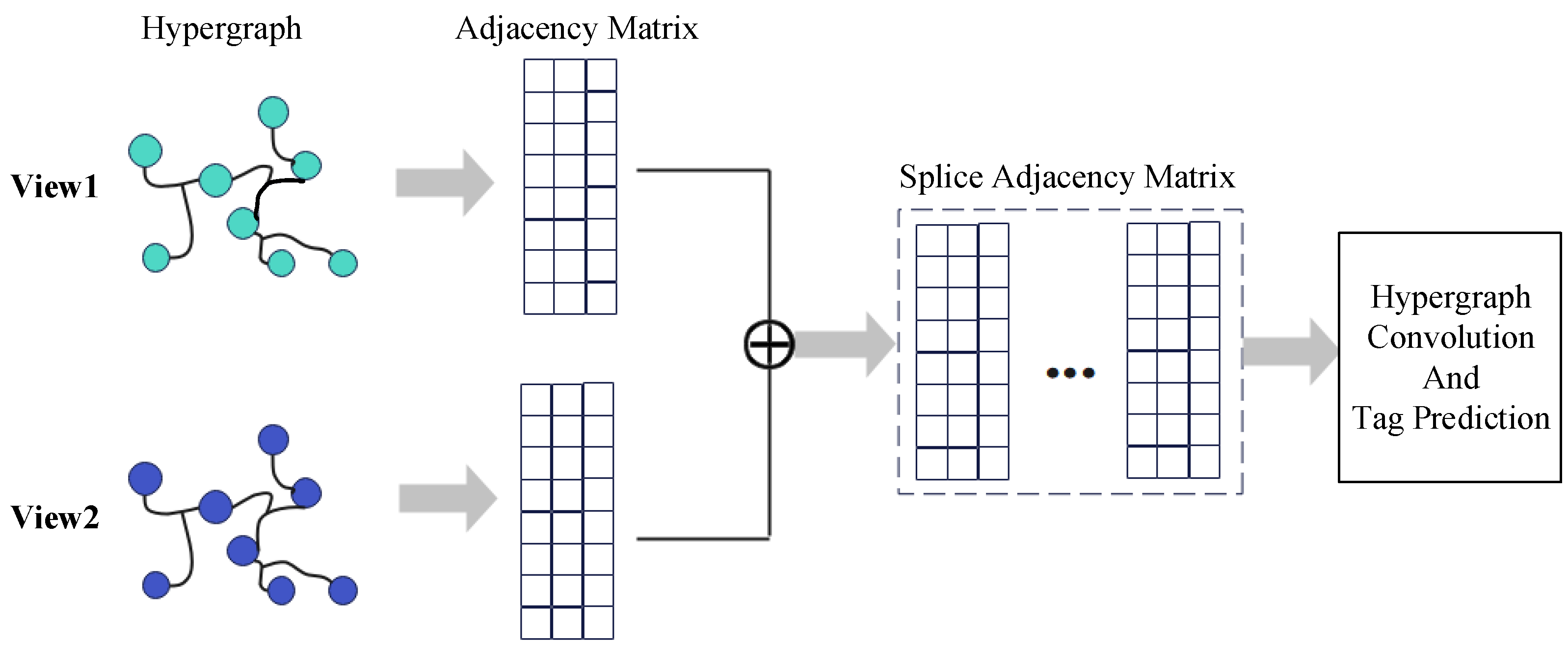
4.2. Hierarchical Hypergraph Construction
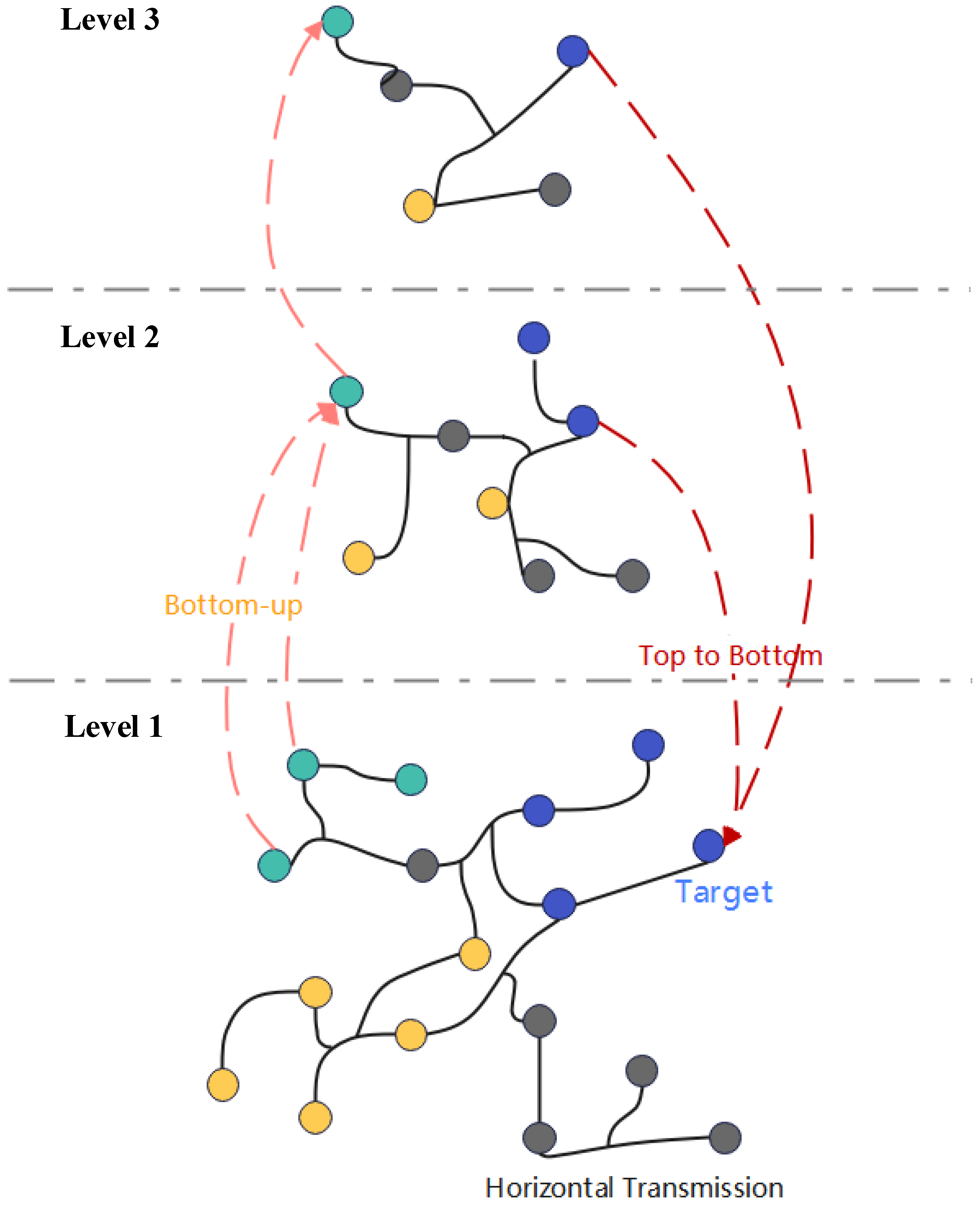
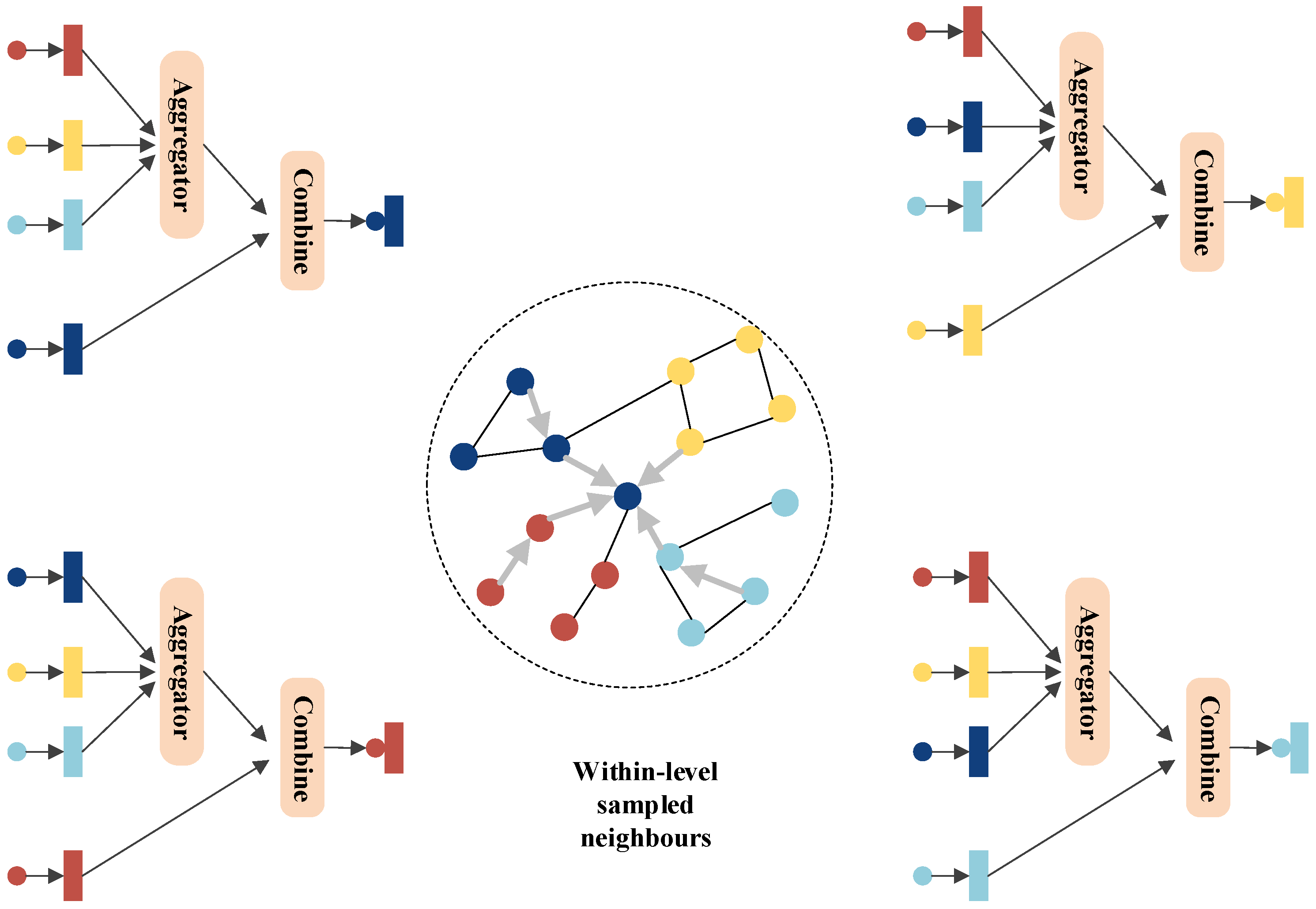
4.3. Hierarchical Information Propagation
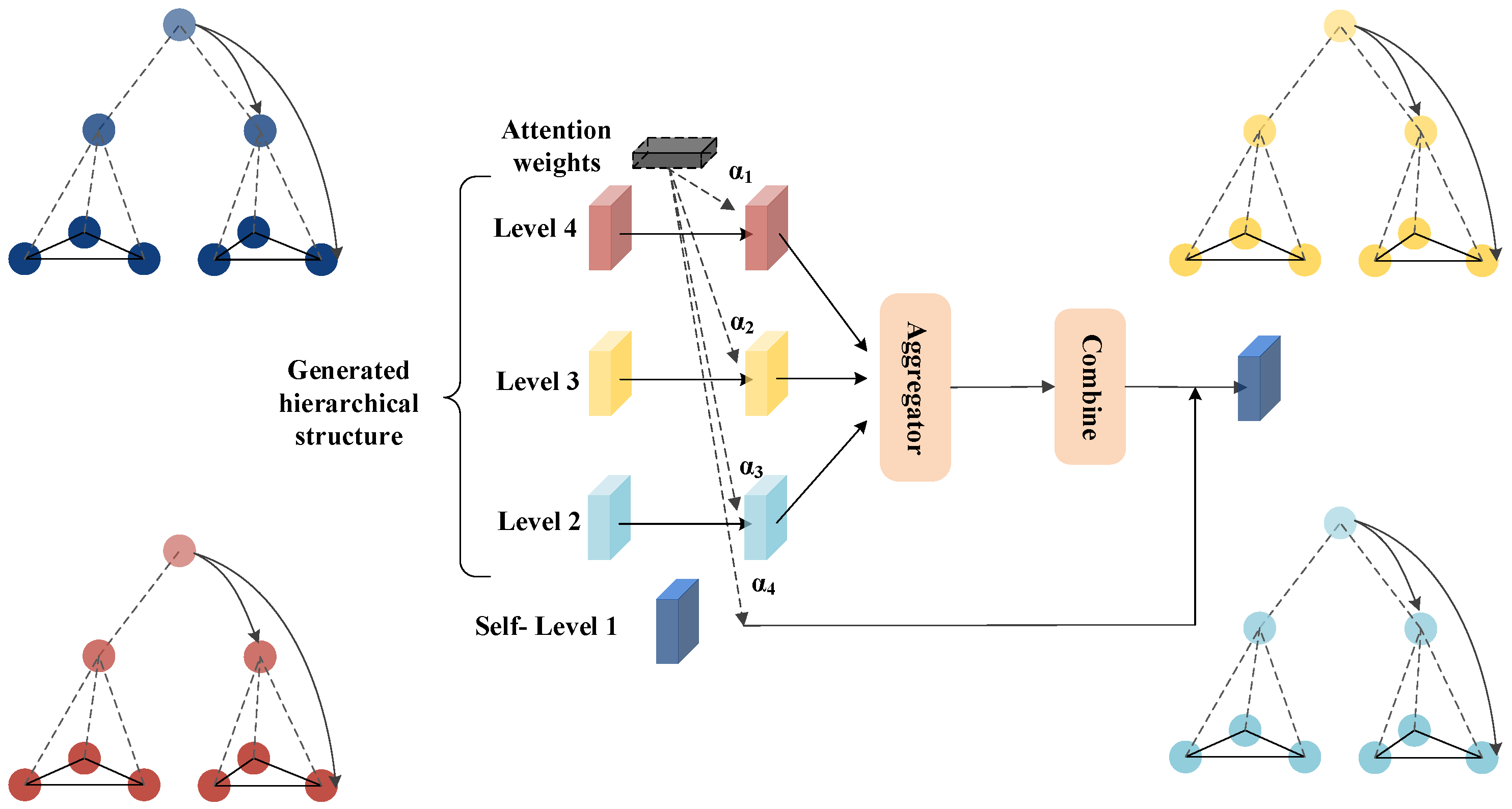
4.4. Inter-Layer Propagation
4.5. Model Training
| Algorithm 1: Hierarchical Hypergraph Neural Network |
 |
5. Experimental Analysis
5.1. Datasets
5.2. Experimental Setup and Results
5.3. Visualization
6. Conclusions
7. Limitations and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Correction Statement
References
- Min, S.; Gao, Z.; Peng, J.; Wang, L.; Qin, K.; Fang, B. STGSN—A spatial–temporal graph neural network framework for time-evolving social networks. Knowl.-Based Syst. 2021, 214, 106746. [Google Scholar] [CrossRef]
- Dhelim, S.; Aung, N.; Ning, H. Mining user interest based on personality-aware hybrid filtering in social networks. Knowl.-Based Syst. 2020, 206, 106227. [Google Scholar] [CrossRef]
- Leahy, J.; Jabari, S. Enhancing Aerial Camera-LiDAR Registration through Combined LiDAR Feature Layers and Graph Neural Networks. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2024, 48, 25–31. [Google Scholar] [CrossRef]
- Yuan, W.; Yuan, X.; Fan, Z.; Guo, Z.; Shi, X.; Gong, J.; Shibasaki, R. Graph neural network based multi-feature fusion for building change detection. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, 43, 377–382. [Google Scholar] [CrossRef]
- Shi, W.; Rajkumar, R. Point-gnn: Graph neural network for 3d object detection in a point cloud. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1711–1719. [Google Scholar]
- Meraz, M.; Ansari, M.A.; Javed, M.; Chakraborty, P. DC-GNN: Drop channel graph neural network for object classification and part segmentation in the point cloud. Int. J. Multimed. Inf. Retr. 2022, 11, 123–133. [Google Scholar] [CrossRef]
- Wu, Y.; Dai, H.N.; Tang, H. Graph neural networks for anomaly detection in industrial Internet of Things. IEEE Internet Things J. 2022, 9, 9214–9231. [Google Scholar] [CrossRef]
- Hamilton, W.; Ying, Z.; Leskovec, J. Inductive representation learning on large graphs. In Proceedings of the International Conference on Advances in Neural Information Processing Systems (NeurIPS), Long Beach, CA, USA, 4–9 December 2017; Volume 30, pp. 1025–1035. [Google Scholar]
- Huang, K.; Xiao, C.; Glass, L.M.; Zitnik, M.; Sun, J. SkipGNN: Predicting molecular interactions with skip-graph networks. Sci. Rep. 2020, 10, 21092. [Google Scholar] [CrossRef] [PubMed]
- Zitnik, M.; Agrawal, M.; Leskovec, J. Modeling polypharmacy side effects with graph convolutional networks. Bioinformatics 2018, 34, 457–466. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, Y. Link prediction based on graph neural networks. In Proceedings of the 2018 Annual Conference on Neural Information Processing Systems (NeurIPS), Montréal, QC, Canada, 3–8 December 2018; pp. 5171–5181. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. In Proceedings of the International Conference on Learning Representations (ICLR), Toulon, France, 24–26 April 2017. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Liò, P.; Bengio, Y. Graph attention networks. In Proceedings of the International Conference on Learning Representations (ICLR), Vancouver, BC, Canada, 30 April–3 May 2018. [Google Scholar]
- Xu, K.; Hu, W.; Leskovec, J.; Jegelka, S. How powerful are graph neural networks? In Proceedings of the 2019 International Conference on Machine Learning (ICML), Long Beach, CA, USA, 9–15 June 2019.
- Min, Y.; Wenkel, F.; Wolf, G. Scattering GCN: Overcoming oversmoothness in graph convolutional networks. In Proceedings of the 2020 Annual Conference on Neural Information Processing Systems (NeurIPS), New Orleans, LA, USA, 10–16 December 2020. [Google Scholar]
- Perozzi, B.; Al-Rfou, R.; Skiena, S. Deepwalk: Online learning of social representations. In Proceedings of the 20th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, New York, NY, USA, 24–27 August 2014; pp. 701–710. [Google Scholar]
- Zhou, D.; Huang, J.; Schölkopf, B. Learning with hypergraphs: Clustering, classification, and embedding. In Proceedings of the Advances in Neural Information Processing Systems, Kelowna, BC, Canada, 4–7 December 2006; Volume 19, pp. 1601–1608. [Google Scholar]
- Feng, Y.; You, H.; Zhang, Z.; Ji, R.; Gao, Y. Hypergraph neural networks. In Proceedings of the AAAI Conference on Artificial Intelligence, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 3558–3565. [Google Scholar]
- Ranjan, E.; Sanyal, S.; Talukdar, P.P. ASAP: Adaptive structure aware pooling for learning hierarchical graph representations. In Proceedings of the 2020 AAAI Conference on Artificial Intelligence (AAAI), New York, NY, USA, 7–12 February 2020; pp. 5470–5477. [Google Scholar]
- Gao, H.; Ji, S. Graph U-Nets. In Proceedings of the 2019 International Conference on Machine Learning (ICML), Long Beach, CA, USA, 9–15 June 2019. [Google Scholar]
- Ying, R.; You, J.; Morris, C.; Ren, X.; Hamilton, W.L.; Leskovec, J. Hierarchical graph representation learning with differentiable pooling. In Proceedings of the 2018 Annual Conference on Neural Information Processing Systems (NeurIPS), Montréal, QC, Canada, 3–8 December 2018; pp. 4805–4815. [Google Scholar]
- Bai, S.; Zhang, F.; Torr, P.H. Hypergraph convolution and hypergraph attention. Pattern Recognit. 2021, 110, 107637. [Google Scholar] [CrossRef]
- Jiang, J.; Wei, Y.; Feng, Y.; Cao, J.; Gao, Y. Dynamic hypergraph neural networks. In Proceedings of the IJCAI, Macao, China, 10–16 August 2019; pp. 2635–2641. [Google Scholar]
- Yadati, N.; Nimishakavi, M.; Yadav, P.; Nitin, V.; Louis, A.; Talukdar, P. Hypergcn: A new method for training graph convolutional networks on hypergraphs. In Proceedings of the Advances in Neural Information Processing Systems, Vancouver, BC, Canada, 8–14 December 2019; Volume 32. [Google Scholar]
- Arya, D.; Gupta, D.K.; Rudinac, S.; Worring, M. Hypersage: Generalizing inductive representation learning on hypergraphs. arXiv 2020, arXiv:2010.04558. [Google Scholar]
- Ye, Z.; Zhao, H.; Zhang, K.; Zhu, Y.; Xiao, Y. Tri-party deep network representation learning using inductive matrix completion. J. Cent. South Univ. 2019, 26, 2746–2758. [Google Scholar] [CrossRef]
- Zhong, Z.; Li, C.T.; Pang, J. Hierarchical message-passing graph neural networks. Data Min. Knowl. Discov. 2023, 37, 381–408. [Google Scholar] [CrossRef]
- Sen, P.; Namata, G.; Bilgic, M.; Getoor, L.; Galligher, B.; Eliassi-Rad, T. Collective classification in network data. AI Mag. 2008, 29, 93. [Google Scholar] [CrossRef]
- Namata, G.; London, B.; Getoor, L.; Huang, B. Query-driven active surveying for collective classification. In Proceedings of the 2012 International Workshop on Mining and Learning with Graphs, Edinburgh, UK, 1 July 2012; p. 8. [Google Scholar]
- Chen, J.; Ma, T.; Xiao, C. FastGCN: Fast learning with graph convolutional networks via importance sampling. arXiv 2018, arXiv:1801.10247. [Google Scholar]
- Yang, C.; Wang, R.; Yao, S.; Abdelzaher, T. Hypergraph learning with line expansion. arXiv 2020, arXiv:2005.04843. [Google Scholar]
- Sunil, K.M. Feature Selection: Key to Enhance Node Classification with Graph Neural Networks). CAAI Trans. Intell. Technol. 2023, 8, 14–28. Available online: https://ietresearch.onlinelibrary.wiley.com/doi/full/10.1049/cit2.12166 (accessed on 29 October 2024).
- Yan, Y.; Chen, Y.; Wang, S.; Wu, H.; Cai, R. Hypergraph Joint Representation Learning for Hypervertices and Hyperedges via Cross Expansion. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 26–27 February 2024; Volume 38, pp. 9232–9240. [Google Scholar]
- Li, M.; Chen, S.; Zhang, Y.; Tsang, I.W. Graph cross networks with vertex infomax pooling. In Proceedings of the 2020 Annual Conference on Neural Information Processing Systems (NeurIPS), Virtual, 6–12 December 2020. [Google Scholar]
- Gao, Y.; Feng, Y.; Ji, S.; Ji, R. HGNN+: General Hypergraph Neural Networks. IEEE Trans. Pattern Anal. Mach. Intell. 2023, 45, 3181–3199. [Google Scholar] [CrossRef] [PubMed]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Nodes/Feature | Train/(val)/Test | Class |
|---|---|---|---|
| Cora | 2708/1433 | 140/500/1000 | 7 |
| Citeseer | 3312/3703 | 140/500/1000 | 6 |
| Pubmed | 19,717/500 | 60/500/1000 | 3 |
| Zoo | 101/16 | 66/35 | 7 |
| Grid | 400 | - | - |
| ModelNet40 | 12,311/(2048/4096) | 9843/2468 | 44 |
| NTU2012 | 2012/(2048/4096) | 1640/372 | 67 |
| Model (Author, Year) | Zoo | Cora | Pubmed | Citeseer |
|---|---|---|---|---|
| GCN [12] | 60.0 ± 1.5 | 80.2 ± 0.9 | 77.9 ± 1.1 | 64.8 ± 1.4 |
| GAT [13] | 48.5 ± 1.2 | 77.2 ± 1.0 | 77.5 ± 0.8 | 62.0 ± 1.3 |
| FastGCN [30] | 37.8 ± 1.6 | 78.0 ± 0.8 | 74.4 ± 1.3 | 63.5 ± 1.5 |
| LADIES [31] | 37.8 ± 1.7 | 78.3 ± 0.7 | 76.8 ± 1.2 | 65.0 ± 1.1 |
| Hyper-Conv [27] | 93.1 ± 0.4 | 82.7 ± 0.5 | 78.4 ± 0.6 | 71.2 ± 0.7 |
| LE [27] | 97.0 ± 0.2 | 82.3 ± 0.4 | 78.7 ± 0.5 | 70.4 ± 0.6 |
| HC-GNN [27] | 85.7 ± 0.5 | 79.0 ± 0.6 | 78.7 ± 0.4 | 65.9 ± 1.0 |
| HJRL [29] | 96.3 ± 0.3 | 77.6 ± 0.5 | 77.3 ± 0.6 | 65.1 ± 1.2 |
| HCHG (Ours) | 97.1 ± 0.2 | 79.8 ± 0.6 | 79.4 ± 0.5 | 66.2 ± 1.0 |
| Model (Author, Year) | Grid | Cora-Feat | Cora-noFeat |
|---|---|---|---|
| GCN [12] | 76.3 ± 1.2 | 86.9 ± 0.9 | 78.5 ± 1.1 |
| GraphSAGE [8] | 77.5 ± 1.1 | 87.0 ± 0.7 | 74.1 ± 1.3 |
| GIN [14] | 75.6 ± 1.0 | 86.2 ± 0.8 | 78.2 ± 1.2 |
| G-U-Net [20] | 70.1 ± 1.5 | 90.9 ± 0.6 | 77.2 ± 1.0 |
| GXN [34] | 64.2 ± 1.4 | 88.9 ± 0.8 | 78.1 ± 1.1 |
| HC-GNN [27] | 80.1 ± 1.3 | 89.4 ± 0.7 | 77.6 ± 1.0 |
| HCHG (Ours) | 87.8 ± 0.9 | 82.1 ± 1.2 | 78.5 ± 1.1 |
| Model (Author, Year) | NTU2012 | ModelNet40 |
|---|---|---|
| Hyper-Conv [27] | 79.4 ± 0.8 | 91.1 ± 1.2 |
| LE [27] | 83.2 ± 1.6 | 94.1 ± 1.3 |
| HGNN [35] | 84.2 ± 1.4 | 96.7 ± 1.2 |
| HGNN+ [35] | 84.2 ± 1.5 | 96.9 ± 1.1 |
| HC-GNN [27] | 83.3 ± 1.0 | 98.1 ± 0.8 |
| HJRL [29] | 86.1 ± 1.3 | 95.8 ± 1.4 |
| HCHG (ours) | 90.0 ± 1.1 | 97.4 ± 1.3 |
| View | HC-GNN [27] | HGNN [35] | HJRL [29] | HCHG (Ours) |
|---|---|---|---|---|
| NTU (mvcnn) | 73.7 ± 1.1 | 69.8 ± 0.9 | 69.6 ± 1.2 | 70.7 ± 1.0 |
| NTU (gvcnn) | 69.7 ± 0.8 | 79.5 ± 0.7 | 80.3 ± 1.6 | 85.7 ± 1.2 |
| NTU (mvc. and gvc.) | 83.3 ± 1.0 | 84.2 ± 1.4 | 86.1 ± 1.3 | 90.0 ± 0.8 |
| ModelNet40 (mvcnn) | 98.1 ± 1.3 | 90.8 ± 1.0 | 92.3 ± 1.7 | 93.9 ± 1.1 |
| ModelNet40 (gvcnn) | 97.3 ± 1.1 | 92.8 ± 0.9 | 90.5 ± 1.4 | 81.5 ± 1.5 |
| ModelNet40 (mvc. and gvc.) | 98.1 ± 0.8 | 96.7 ± 1.2 | 95.8 ± 1.4 | 97.4 ± 1.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, F.; Xiong, W.; Fan, Z.; Sun, L. Node Classification Method Based on Hierarchical Hypergraph Neural Network. Sensors 2024, 24, 7655. https://doi.org/10.3390/s24237655
Xu F, Xiong W, Fan Z, Sun L. Node Classification Method Based on Hierarchical Hypergraph Neural Network. Sensors. 2024; 24(23):7655. https://doi.org/10.3390/s24237655
Chicago/Turabian StyleXu, Feng, Wanyue Xiong, Zizhu Fan, and Licheng Sun. 2024. "Node Classification Method Based on Hierarchical Hypergraph Neural Network" Sensors 24, no. 23: 7655. https://doi.org/10.3390/s24237655
APA StyleXu, F., Xiong, W., Fan, Z., & Sun, L. (2024). Node Classification Method Based on Hierarchical Hypergraph Neural Network. Sensors, 24(23), 7655. https://doi.org/10.3390/s24237655