
Resilient Multi-Robot Coverage Path Redistribution Using Boustrophedon Decomposition for Environmental Monitoring



Abstract
1. Introduction
- We introduce a task redistribution framework, applying the concept of propagation to BCD-based multi-robot coverage technology, ensuring balanced coverage even in the event of robot failure, and propose a new algorithm.
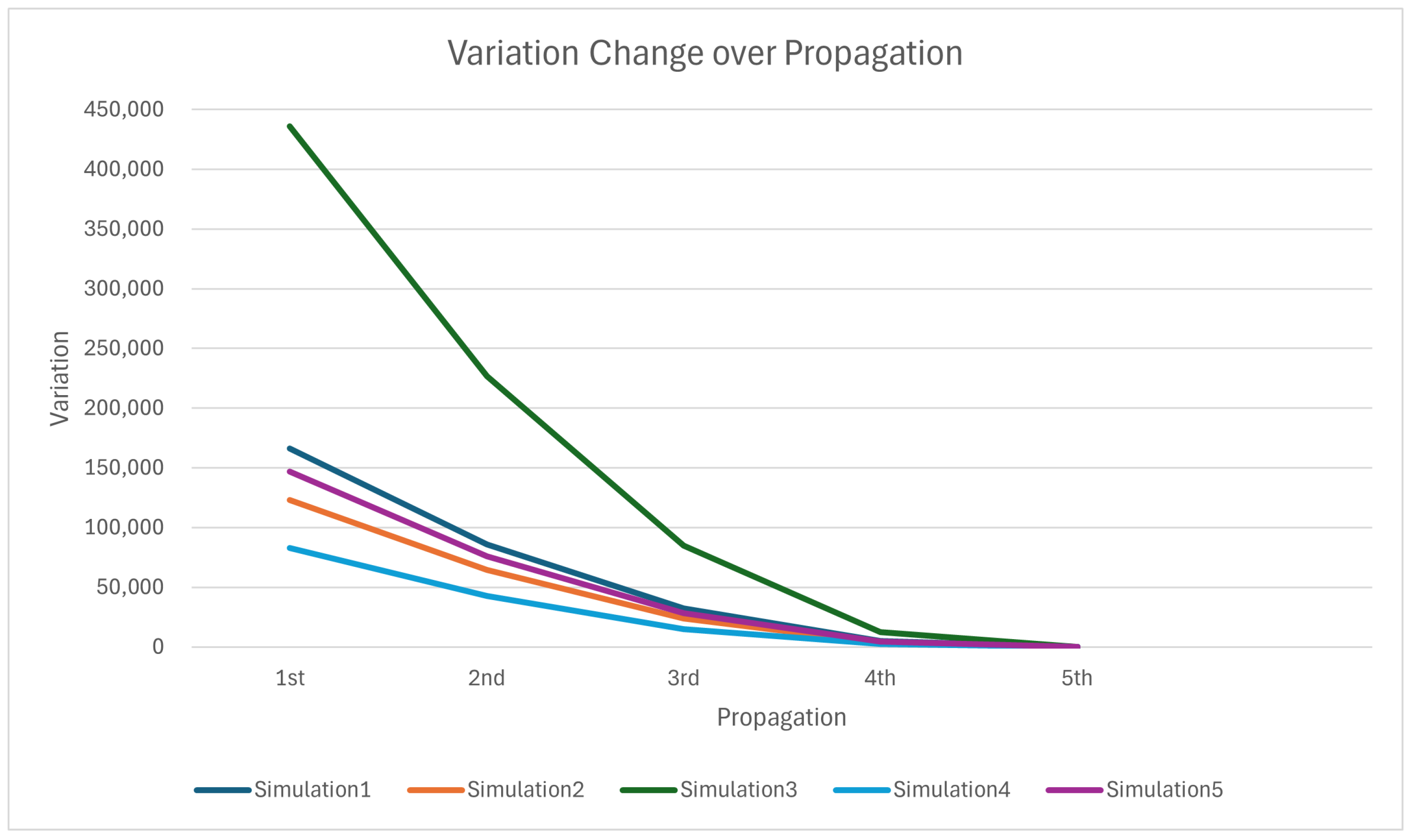
- We validate the performance of our approach through simulations in various environments, ranging from obstacle-rich to open spaces, and demonstrate that the propagation process leads to equalized task distribution over time.
2. Related Work
3. Problem Description
3.1. Key Assumptions and Requirements
- It is assumed that the BCD algorithm generates collision-free and non-overlapping paths for each robot. The paths are divided based on the sensing range of the robots, ensuring that each robot can efficiently cover its assigned area.
- Robots may experience unexpected failures during the mission, and these failures result in unmonitored areas. The failed robot has neighboring robots capable of absorbing the additional coverage tasks.
- These neighboring robots are determined based on their spatial proximity to , and they form an adjacency structure that facilitates the redistribution process.
- Redistribution aims to minimize the variance in the workload across the remaining robots. This involves ensuring that the additional coverage responsibilities are allocated in proportion to each robot’s current task load and their proximity to the failed robot’s path.
- It is assumed that each robot can dynamically adjust its path to absorb new coverage tasks without significantly deviating from its original path plan.
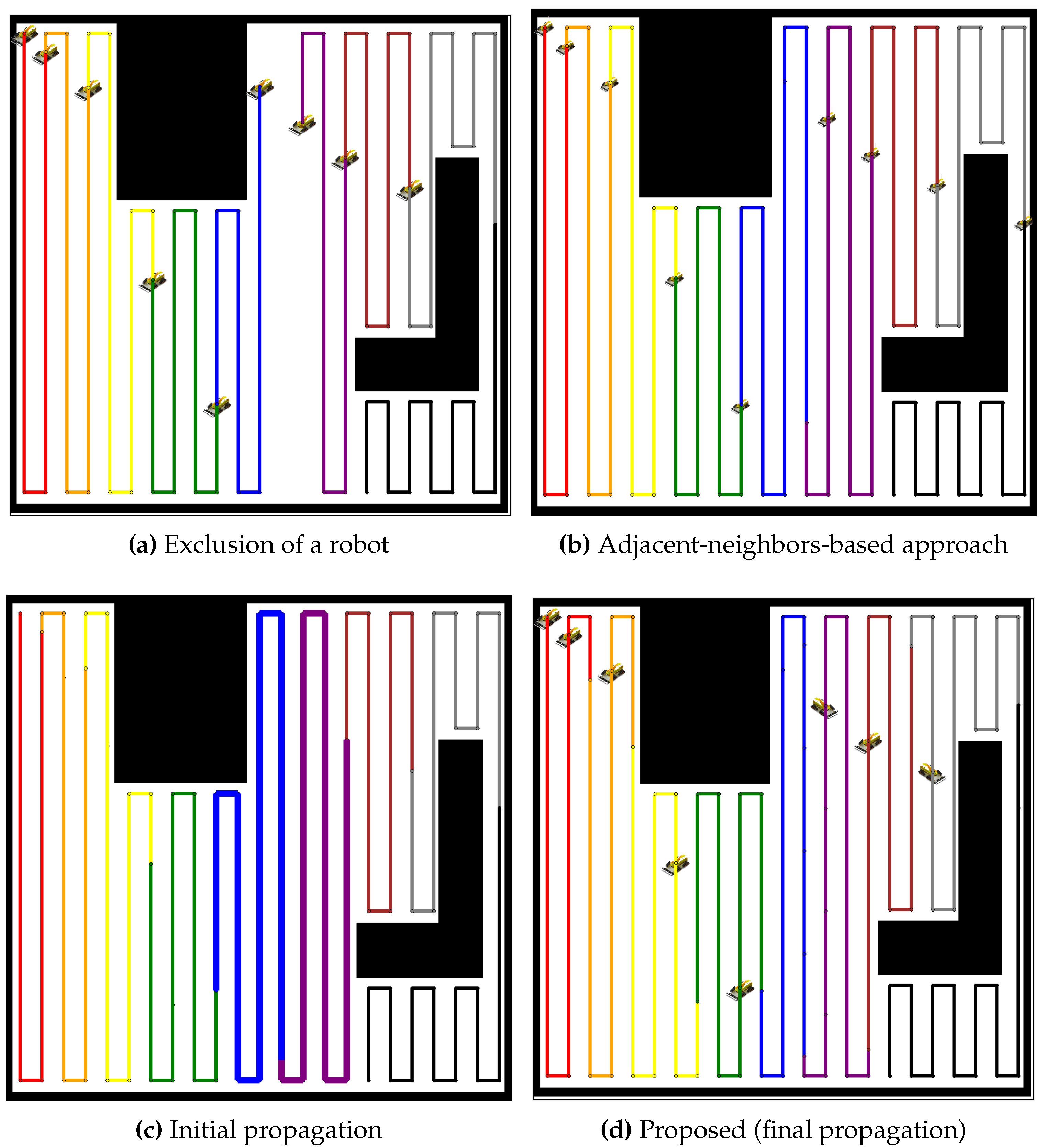
- The proposed solution leverages a propagation-based approach [1], where redistribution starts with the nearest neighboring robots and progressively extends to more distant robots if necessary. This ensures that the additional workload is not concentrated on a single robot, maintaining a balanced task distribution.
- It is assumed that the robots have a reliable communication mechanism to share coverage information, allowing them to coordinate effectively during the redistribution process. This communication is crucial for ensuring that the coverage paths are adjusted in a synchronized manner across the entire team.
3.2. Objective
4. Proposed Method
4.1. MCPP Based on BCD
4.2. Tree Construction for the Excluded Robot
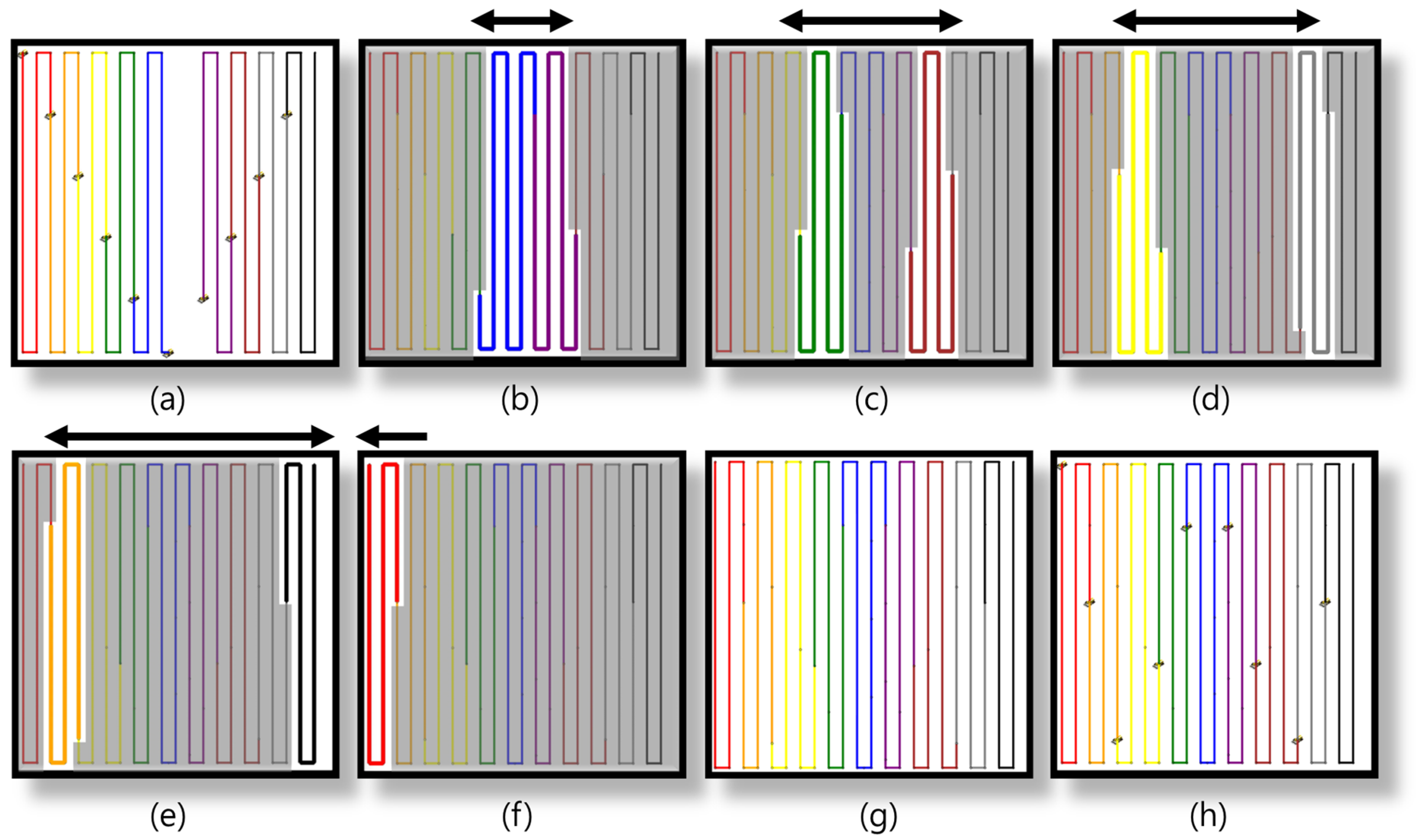
4.3. Propagation-Based Coverage Redistribution and Path Replanning
| Algorithm 1 Propagation-Based Coverage Redistribution |
|
5. Simulation
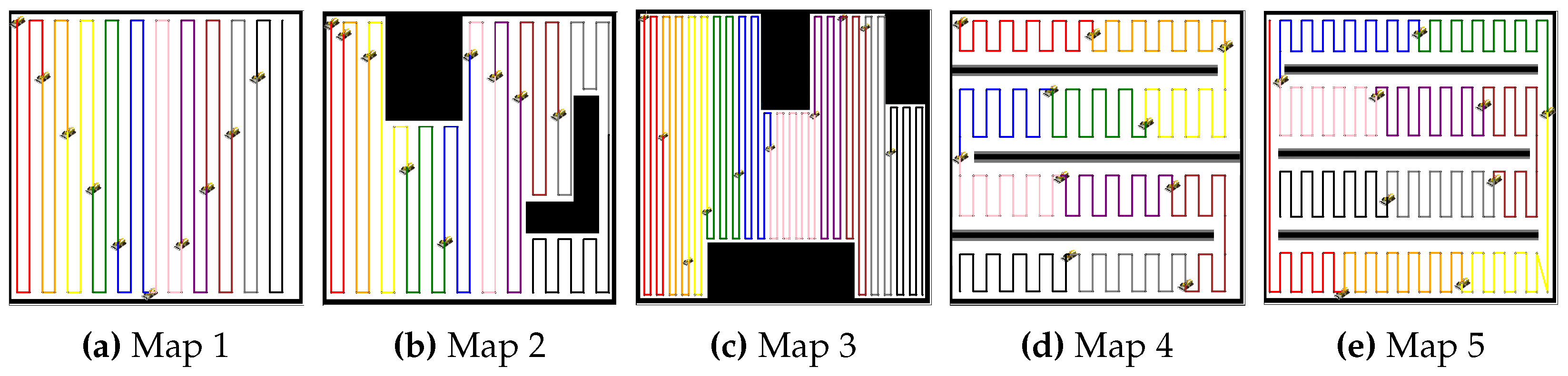
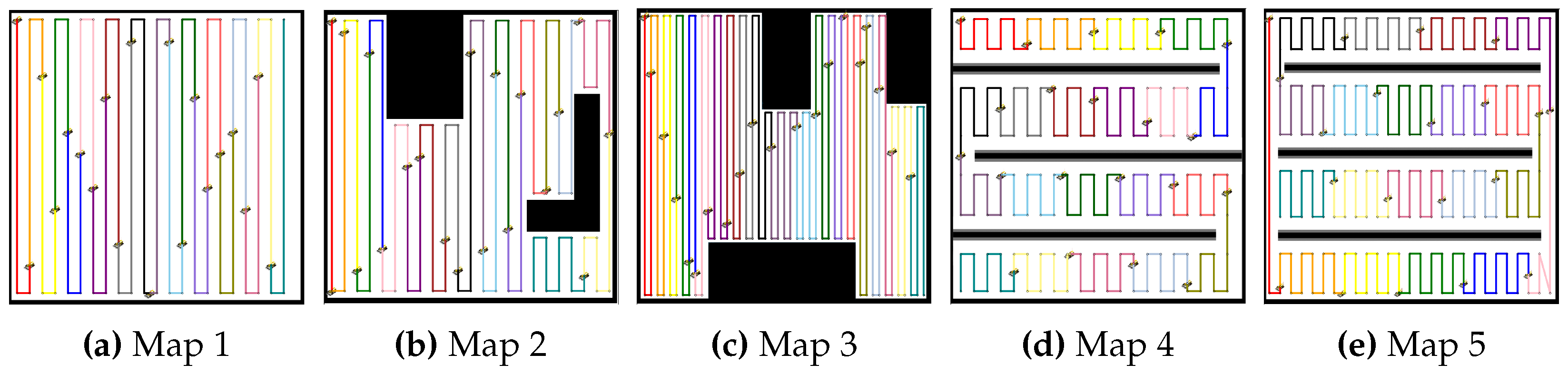
5.1. Simulation Environments
5.2. Simulation Results: Multi-Robot Coverage Path Planning
5.3. Simulation Results: Balanced Path Redistribution
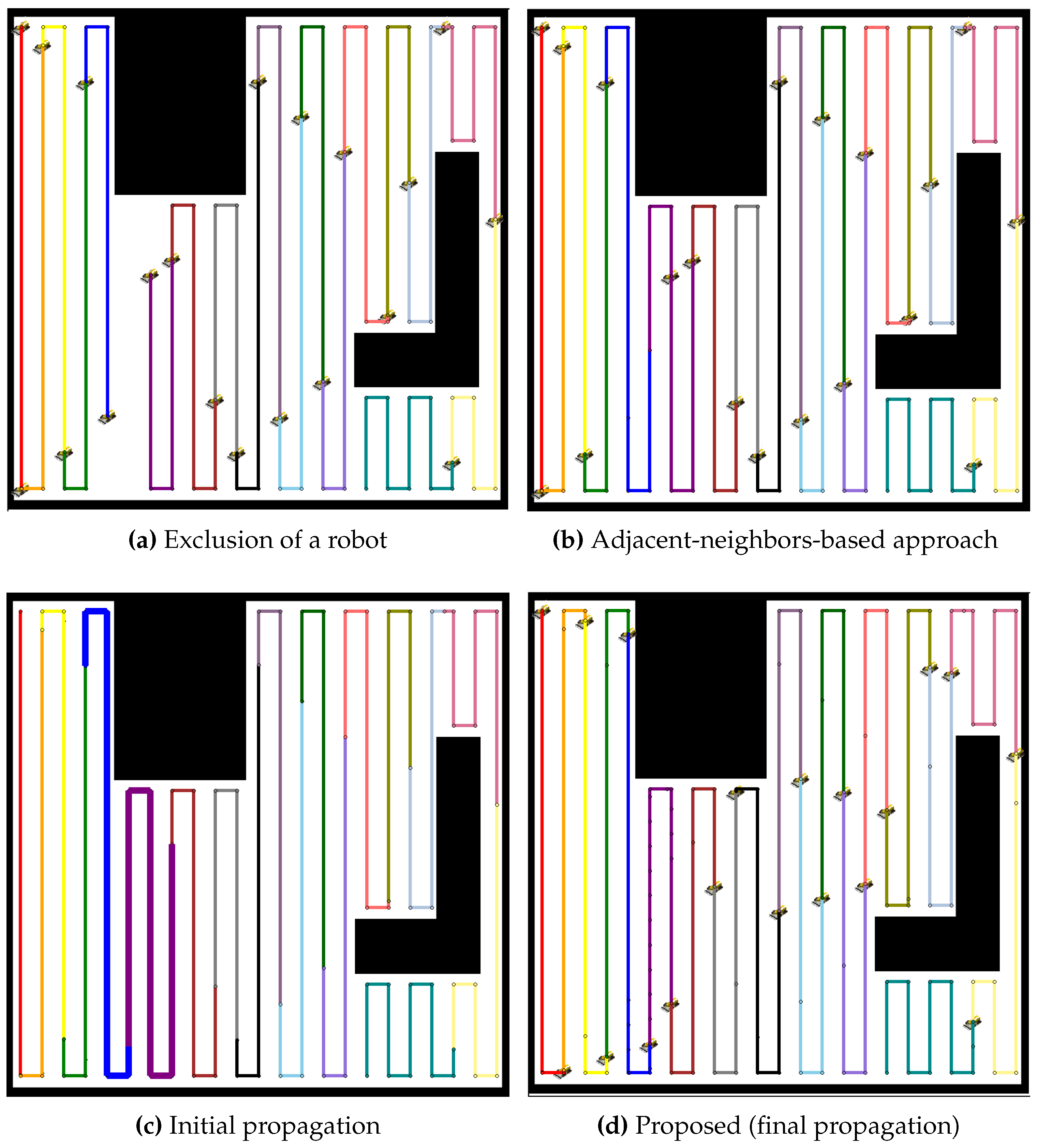
5.3.1. Simple Open Environment (Map 1)
5.3.2. Environments with Two Obstacles (Map 2)
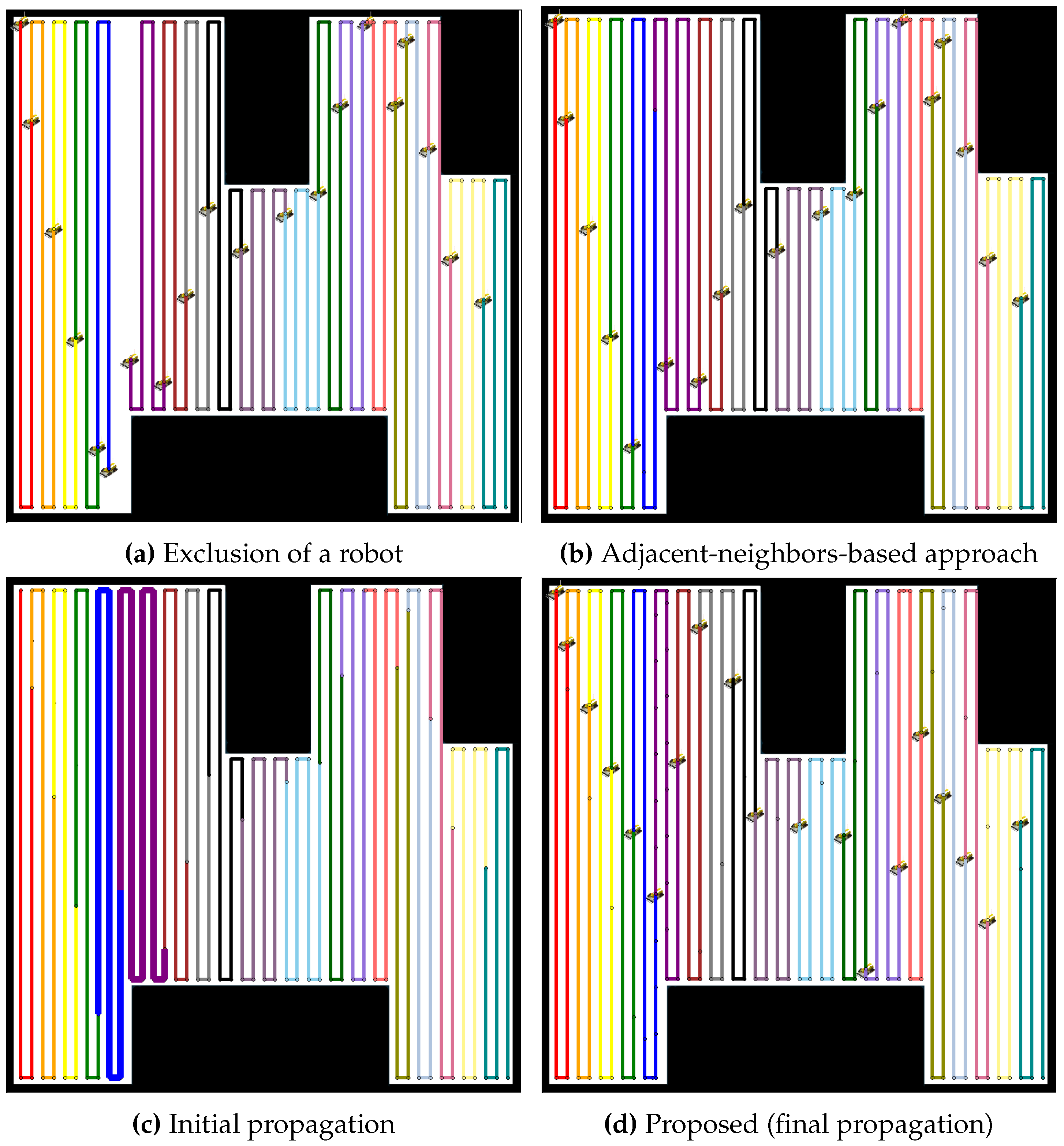
5.3.3. Environments with Multiple Obstacles (Map 3)
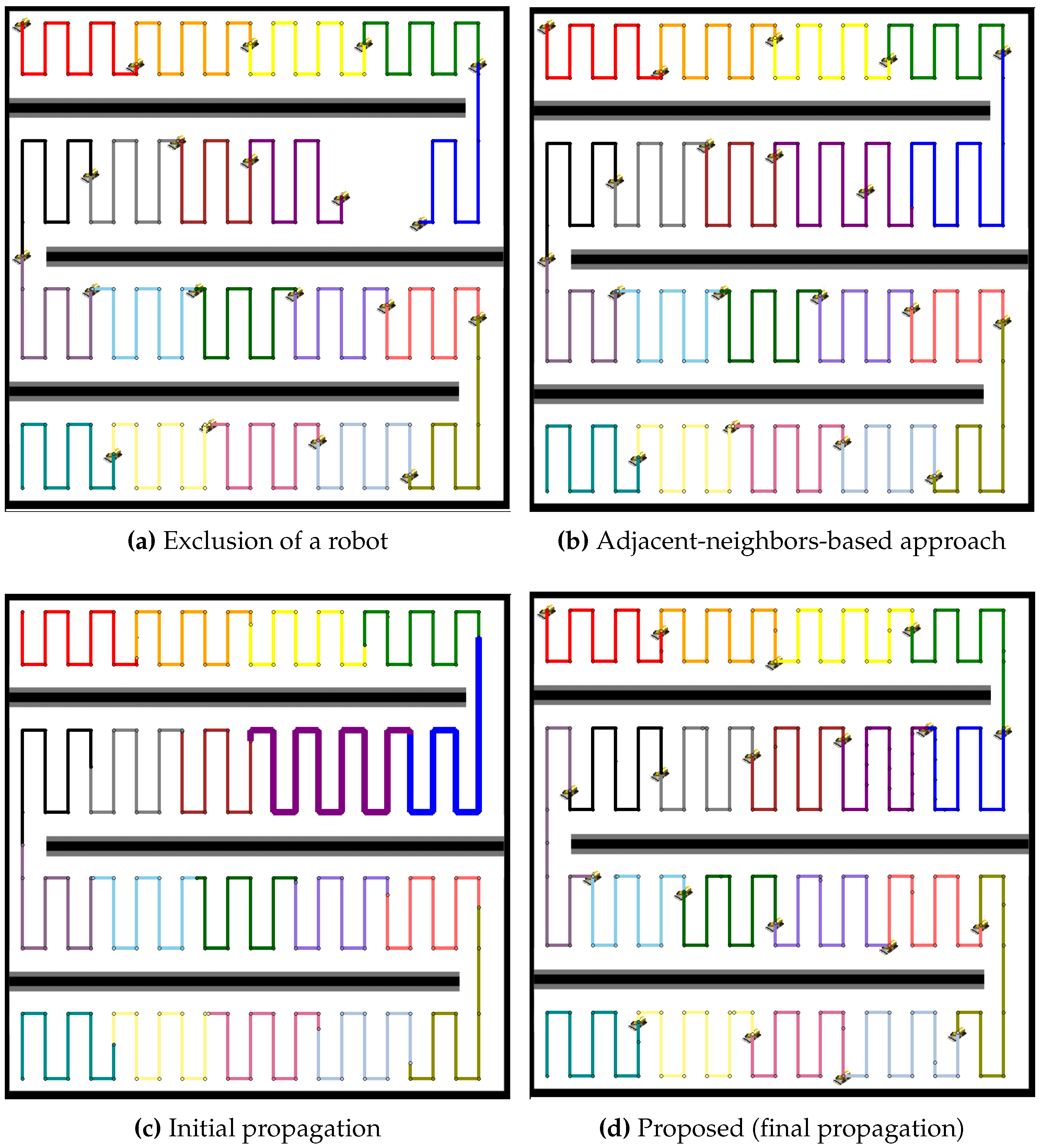
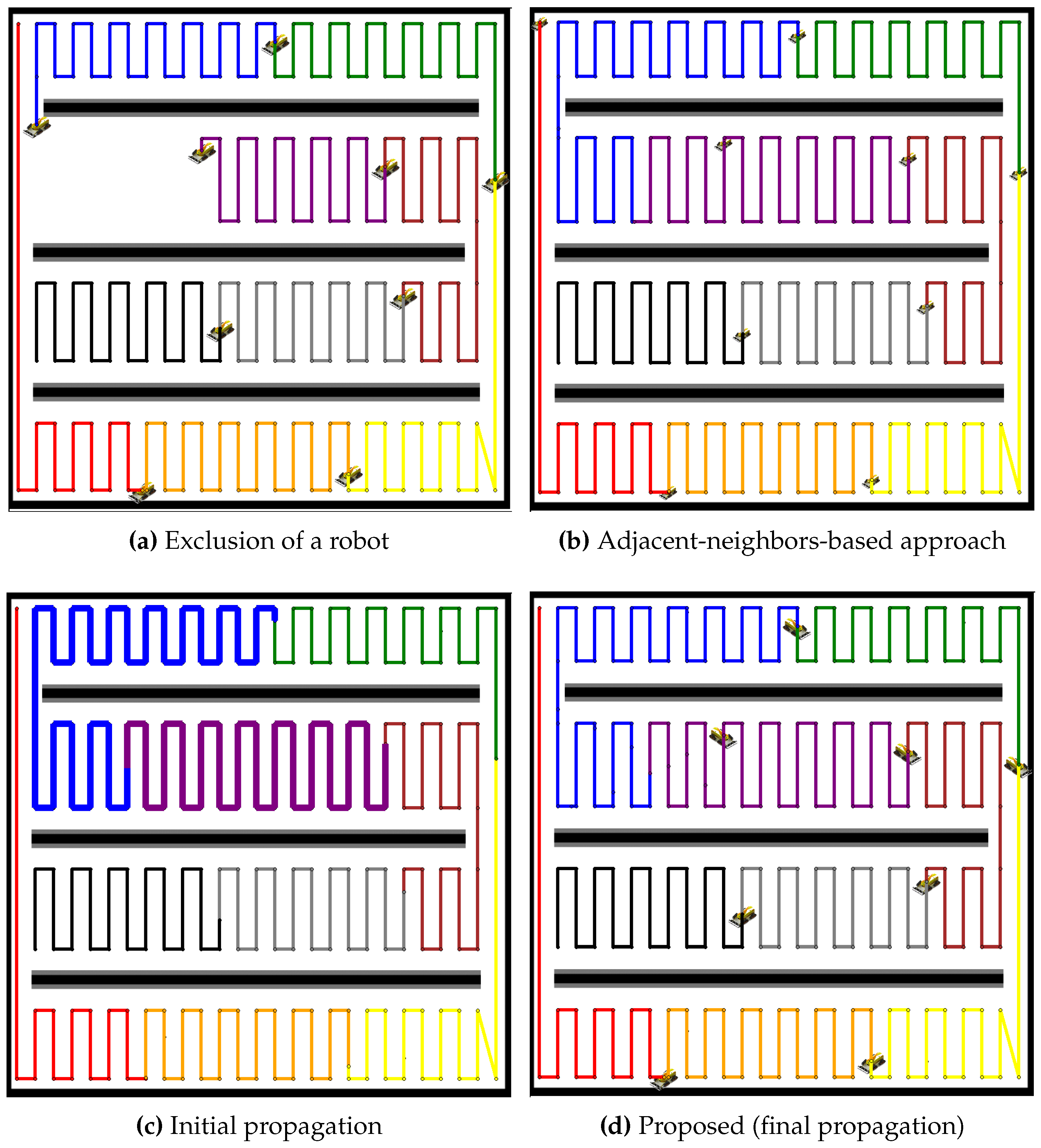
5.3.4. Environments with Multiple Lanes (Map 4 and Map 5)
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lee, S. An Efficient Coverage Area Re-Assignment Strategy for Multi-Robot Long-Term Surveillance. IEEE Access 2023, 11, 33757–33767. [Google Scholar] [CrossRef]
- Choton, J.C.; Prabhakar, P. Optimal Multi-Robot Coverage Path Planning for Agricultural Fields using Motion Dynamics. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 11817–11823. [Google Scholar] [CrossRef]
- Lee, S.; Kim, H.J.; Lee, B.H. An Efficient Rescue System with Online Multi-Agent SLAM Framework. Sensors 2020, 20, 235. [Google Scholar] [CrossRef] [PubMed]
- Galceran, E.; Carreras, M. A survey on coverage path planning for robotics. Robot. Auton. Syst. 2013, 61, 1258–1276. [Google Scholar] [CrossRef]
- Foster, A.J.I.; Gianni, M.; Aly, A.; Samani, H.; Sharma, S. Multi-Robot Coverage Path Planning for the Inspection of Offshore Wind Farms: A Review. Drones 2024, 8, 10. [Google Scholar] [CrossRef]
- Shah, K.; Schmidt, A.; Ballard, G.; Schwager, M. Large Scale Aerial Multi-Robot Coverage Path Planning. Field Robot. 2022, 2, 1–17. [Google Scholar] [CrossRef]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. A survey on multi-robot coverage path planning for model reconstruction and mapping. SN Appl. Sci. 2019, 1, 847. [Google Scholar] [CrossRef]
- Cai, C.; Chen, J.; Yan, Q.; Liu, F. A Multi-Robot Coverage Path Planning Method for Maritime Search and Rescue Using Multiple AUVs. Remote Sens. 2023, 15, 93. [Google Scholar] [CrossRef]
- Song, J.; Gupta, S. CARE: Cooperative Autonomy for Resilience and Efficiency of Robot Teams for Complete Coverage of Unknown Environments under Robot Failures. Auton. Robot. 2019, 44, 647–671. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage path planning: The boustrophedon cellular decomposition. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar] [CrossRef]
- Sun, R.; Tang, C.; Zheng, J.; Zhou, Y.; Yu, S. Multi-robot Path Planning for Complete Coverage with Genetic Algorithms. In Proceedings of the Intelligent Robotics and Applications Lecture Notes in Computer Science, Shenyang, China, 8–11 August 2019; Springer: Cham, Switzerland, 2019; Volume 11744, pp. 349–361. [Google Scholar] [CrossRef]
- Noh, D.K.; Choi, J.H.; Choi, J.S.; Byun, D.S.; Kim, Y.; Kim, H.R.; Baek, S.M.; Lee, S.H.; Myung, H. MASS: Multi-Agent Scheduling System for Intelligent Surveillance. In Proceedings of the 2022 19th International Conference on Ubiquitous Robots (UR), Jeju, Republic of Korea, 4–6 July 2022; pp. 252–257. [Google Scholar] [CrossRef]
- Madridano, Á.; Al-Kaff, A.; Martín, D.; de la Escalera, A. Trajectory Planning for Multi-Robot Systems: Methods and Applications. Expert Syst. Appl. 2021, 173, 114660. [Google Scholar] [CrossRef]
- Rekleitis, I.; New, A.P.; Rankin, E.S.; Choset, H. Efficient boustrophedon multi-robot coverage: An algorithmic approach. Ann. Math. Artif. Intell. 2008, 52, 109–142. [Google Scholar] [CrossRef]
- Gabriely, Y.; Rimon, E. Spanning-tree based coverage of continuous areas by a mobile robot. Ann. Math. Artif. Intell. 2001, 31, 77–98. [Google Scholar] [CrossRef]
- Tang, J.; Sun, C.; Zhang, X. MSTC*: Multi-robot coverage path planning under physical constraints. In Proceedings of the IEEE International Conference on Robotics and Automation, Virtual, 6–10 December 2021; pp. 2518–2524. [Google Scholar] [CrossRef]
- Tang, J.; Ma, H. Large-Scale Multi-Robot Coverage Path Planning via Local Search. In Proceedings of the AAAI Conference on Artificial Intelligence, Vancouver, BC, Canada, 20–27 February 2024; Volume 38, pp. 17567–17574. [Google Scholar] [CrossRef]
- Lu, J.; Zeng, B.; Tang, J.; Lam, T.L.; Wen, J. TMSTC*: A Path Planning Algorithm for Minimizing Turns in Multi-Robot Coverage. IEEE Robot. Autom. Lett. 2023, 8, 5275–5284. [Google Scholar] [CrossRef]
- Kapoutsis, A.C.; Chatzichristofis, S.A.; Kosmatopoulos, E.B. DARP: Divide Areas Algorithm for Optimal Multi-Robot Coverage Path Planning. J. Intell. Robot. Syst. 2017, 86, 663–680. [Google Scholar] [CrossRef]
- Karapetyan, N.; Benson, K.; McKinney, C.; Taslakian, P.; Rekleitis, I. Efficient Multi-Robot Coverage of a Known Environment. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 1846–1852. [Google Scholar] [CrossRef]
- Azpúrua, H.; Freitas, G.M.; Macharet, D.G.; Campos, M.F.M. Multi-Robot Coverage Path Planning Using Hexagonal Segmentation for Geophysical Surveys. Robotica 2018, 36, 1144–1166. [Google Scholar] [CrossRef]
- Huang, X.; Sun, M.; Zhou, H.; Zhang, J. A Multi-Robot Coverage Path Planning Algorithm for the Environment With Multiple Land Cover Types. IEEE Access 2020, 8, 198101–198117. [Google Scholar] [CrossRef]
- Gong, J.; Lee, S. Hierarchical Area-Based and Path-Based Heuristic Approaches for Multirobot Coverage Path Planning with Performance Analysis in Surveillance Systems. Sensors 2023, 23, 8533. [Google Scholar] [CrossRef] [PubMed]
- Zhou, Z.; Lee, D.J.; Yoshinaga, Y.; Balakirsky, S.; Guo, D.; Zhao, Y. Reactive task allocation and planning for quadrupedal and wheeled robot teaming. In Proceedings of the 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE), Mexico City, Mexico, 20–24 August 2022; pp. 2110–2117. [Google Scholar] [CrossRef]
- Fazli, P.; Davoodi, A.; Mackworth, A.K. Multi-robot repeated area coverage. Auton. Robot. 2013, 34, 251–276. [Google Scholar] [CrossRef]
- Collins, L.; Ghassemi, P.; Esfahani, E.T.; Doermann, D.; Dantu, K.; Chowdhury, S. Scalable coverage path planning of multi-robot teams for monitoring non-convex areas. In Proceedings of the IEEE International Conference on Robotics and Automation, Virtual, 6–10 December 2021; pp. 7393–7399. [Google Scholar] [CrossRef]
- Almadhoun, R.; Taha, T.; Seneviratne, L.; Zweiri, Y. Multi-Robot Hybrid Coverage Path Planning for 3D Reconstruction of Large Structures. IEEE Access 2022, 10, 2037–2050. [Google Scholar] [CrossRef]
- Bähnemann, R.; Lawrance, N.; Chung, J.J.; Pantic, M.; Siegwart, R.; Nieto, J. Revisiting Boustrophedon Coverage Path Planning as a Generalized Traveling Salesman Problem. In Field and Service Robotics; Springer Proceedings in Advanced Robotics; Ishigami, G., Yoshida, K., Eds.; Springer: Singapore, 2021; Volume 16. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | |
|---|---|
| Adjacent-neighbors-based approach () | 169,400.0 |
| Initial propagation () | 166,113.58 |
| Proposed (final propagation) () | 0 |
| Adjacent-neighbors-based approach () | 23,072.55 |
| Initial propagation () | 29,490.88 |
| Proposed (final propagation) () | 0.97 |
| Approach | |
|---|---|
| Adjacent-neighbors-based approach () | 128,640.44 |
| Initial propagation () | 130,683.70 |
| Proposed (final propagation) () | 0.17 |
| Adjacent-neighbors-based approach () | 17,524.39 |
| Initial propagation () | 21,943.51 |
| Proposed (final propagation) () | 0.23 |
| Approach | |
|---|---|
| Adjacent-neighbors-based approach () | 443,814.0 |
| Initial propagation () | 450,863.68 |
| Proposed (final propagation) () | 0.69 |
| Adjacent-neighbors-based approach () | 60,459.49 |
| Initial propagation () | 75,733.03 |
| Proposed (final propagation) () | 0.64 |
| Approach | for Map 4 | for Map 5 |
|---|---|---|
| Adjacent-neighbors-based approach () | 84,242.89 | 146,288.44 |
| Initial propagation () | 85,583.36 | 148,587.81 |
| Proposed (final propagation) () | 0.44 | 0.57 |
| Adjacent-neighbors-based approach () | 11,479.92 | 19,883.43 |
| Initial propagation () | 14,321.88 | 24,875.30 |
| Proposed (final propagation) () | 0.62 | 0.85 |
| N | Metric | Map 1 | Map 2 | Map 3 | Map 4 | Map 5 | Avg_Time |
|---|---|---|---|---|---|---|---|
| 10 | 2.91 | 3.00 | 2.95 | 2.96 | 2.90 | 2.94 | |
| 0.012 | 0.014 | 0.015 | 0.016 | 0.017 | 0.0148 | ||
| 20 | 2.94 | 3.01 | 2.96 | 2.99 | 2.93 | 2.96 | |
| 0.015 | 0.015 | 0.016 | 0.016 | 0.017 | 0.0158 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Kim, H.; Lee, S. Resilient Multi-Robot Coverage Path Redistribution Using Boustrophedon Decomposition for Environmental Monitoring. Sensors 2024, 24, 7482. https://doi.org/10.3390/s24237482
Gong J, Kim H, Lee S. Resilient Multi-Robot Coverage Path Redistribution Using Boustrophedon Decomposition for Environmental Monitoring. Sensors. 2024; 24(23):7482. https://doi.org/10.3390/s24237482
Chicago/Turabian StyleGong, Junghwan, Hyunbin Kim, and Seunghwan Lee. 2024. "Resilient Multi-Robot Coverage Path Redistribution Using Boustrophedon Decomposition for Environmental Monitoring" Sensors 24, no. 23: 7482. https://doi.org/10.3390/s24237482
APA StyleGong, J., Kim, H., & Lee, S. (2024). Resilient Multi-Robot Coverage Path Redistribution Using Boustrophedon Decomposition for Environmental Monitoring. Sensors, 24(23), 7482. https://doi.org/10.3390/s24237482