
Application of Laser-Induced Graphene Flexible Sensor in Monitoring Large Deformation of Reinforced Concrete Structure



Abstract
1. Introduction
2. Preparation and Characterization of LIG Material
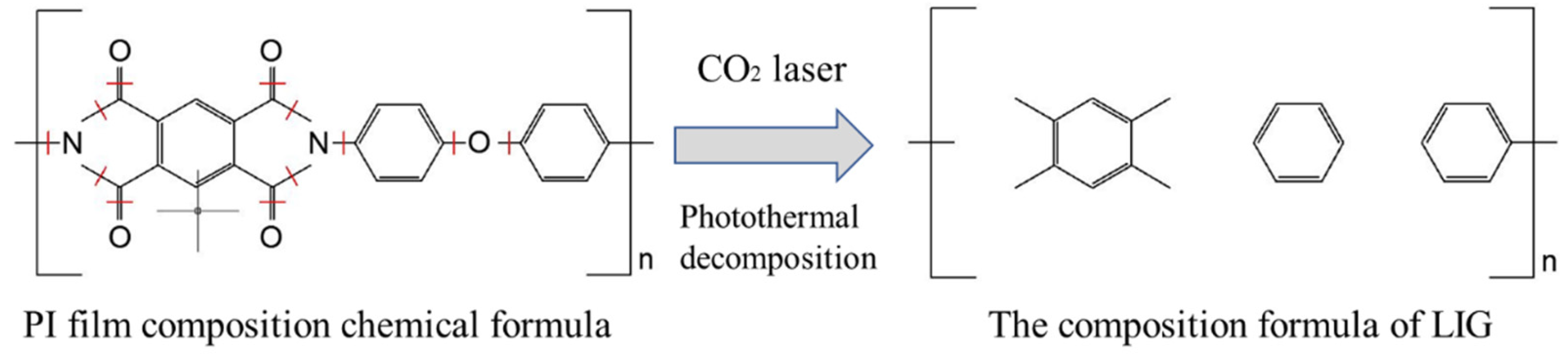
2.1. Preparation Process of LIG Material
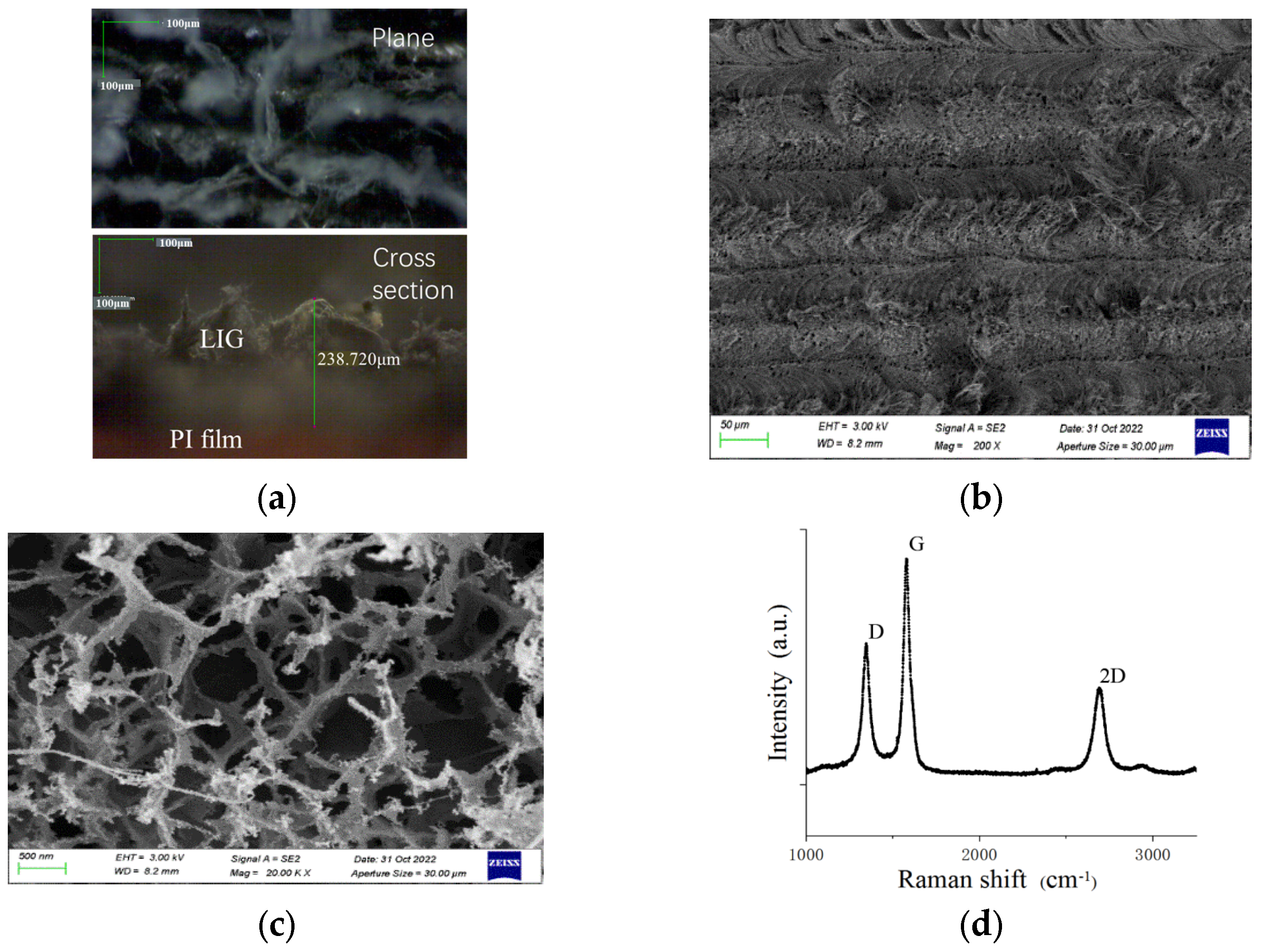
2.2. Characterization of LIG Material
3. Preparation and Performance of LIG Flexible Sensor
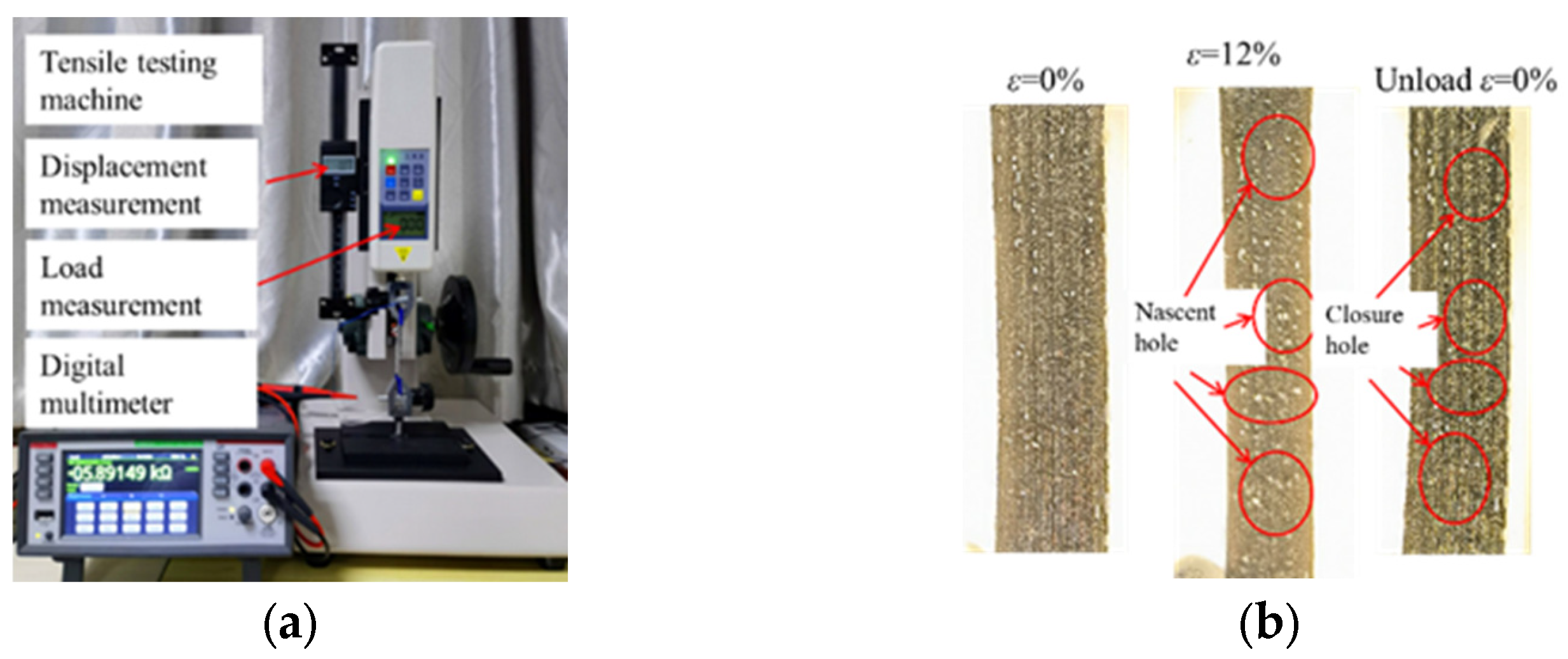
3.1. Preparation of LIG Flexible Sensor
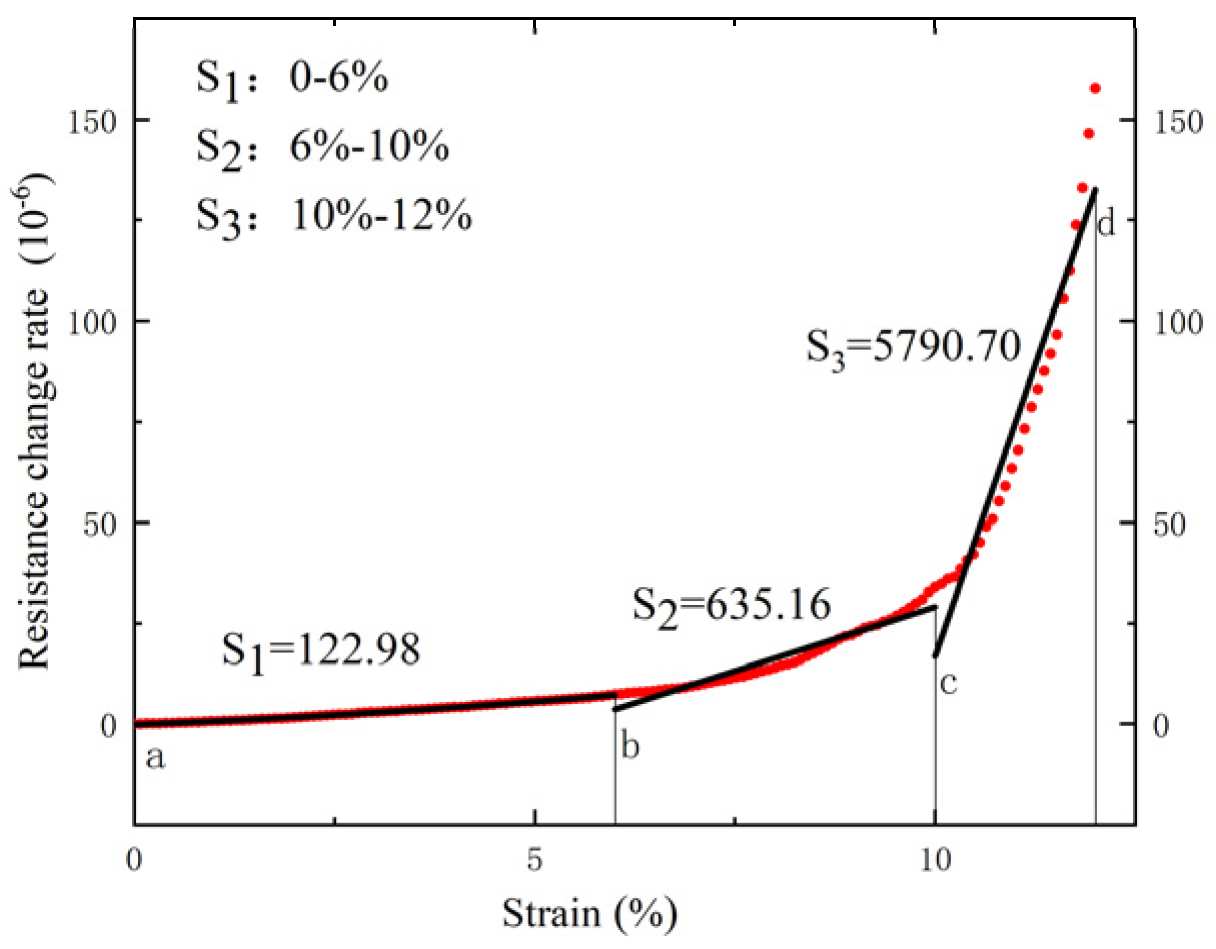
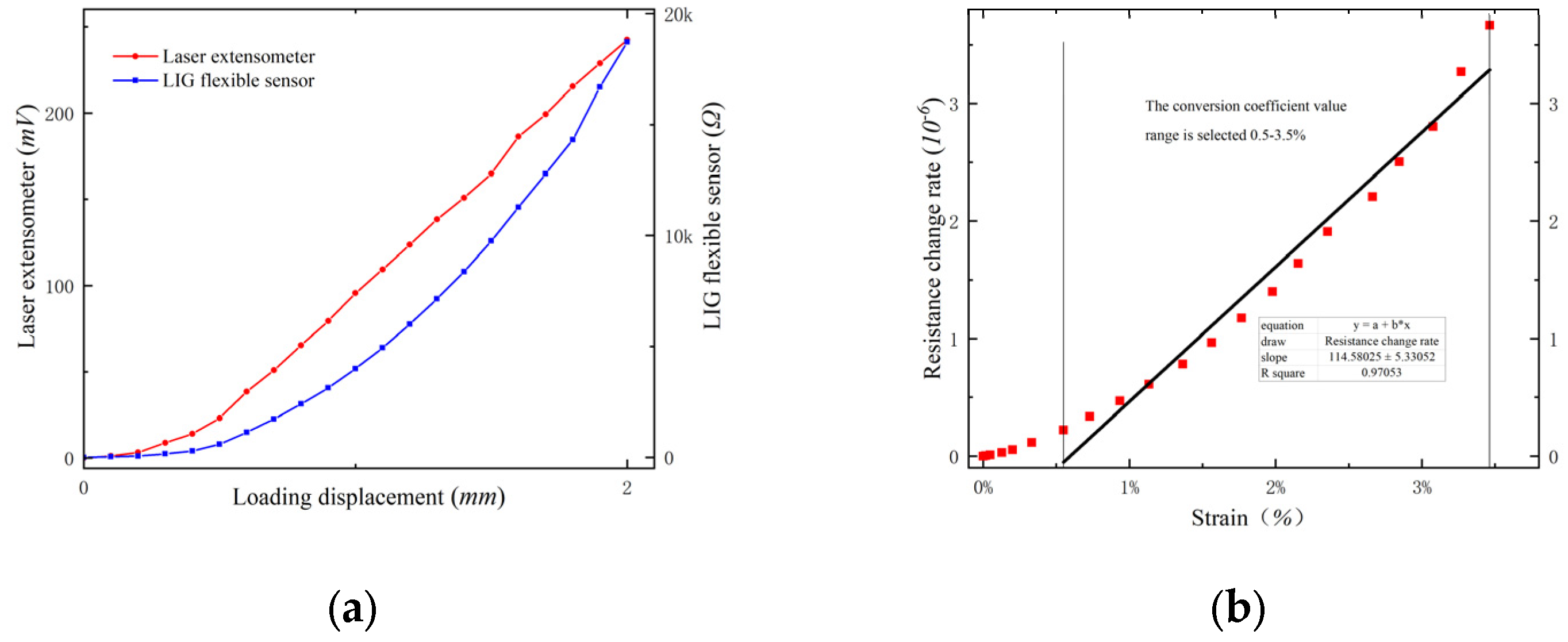
3.2. Performance Test of LIG Flexible Sensor
4. Applications of LIG Flexible Sensors
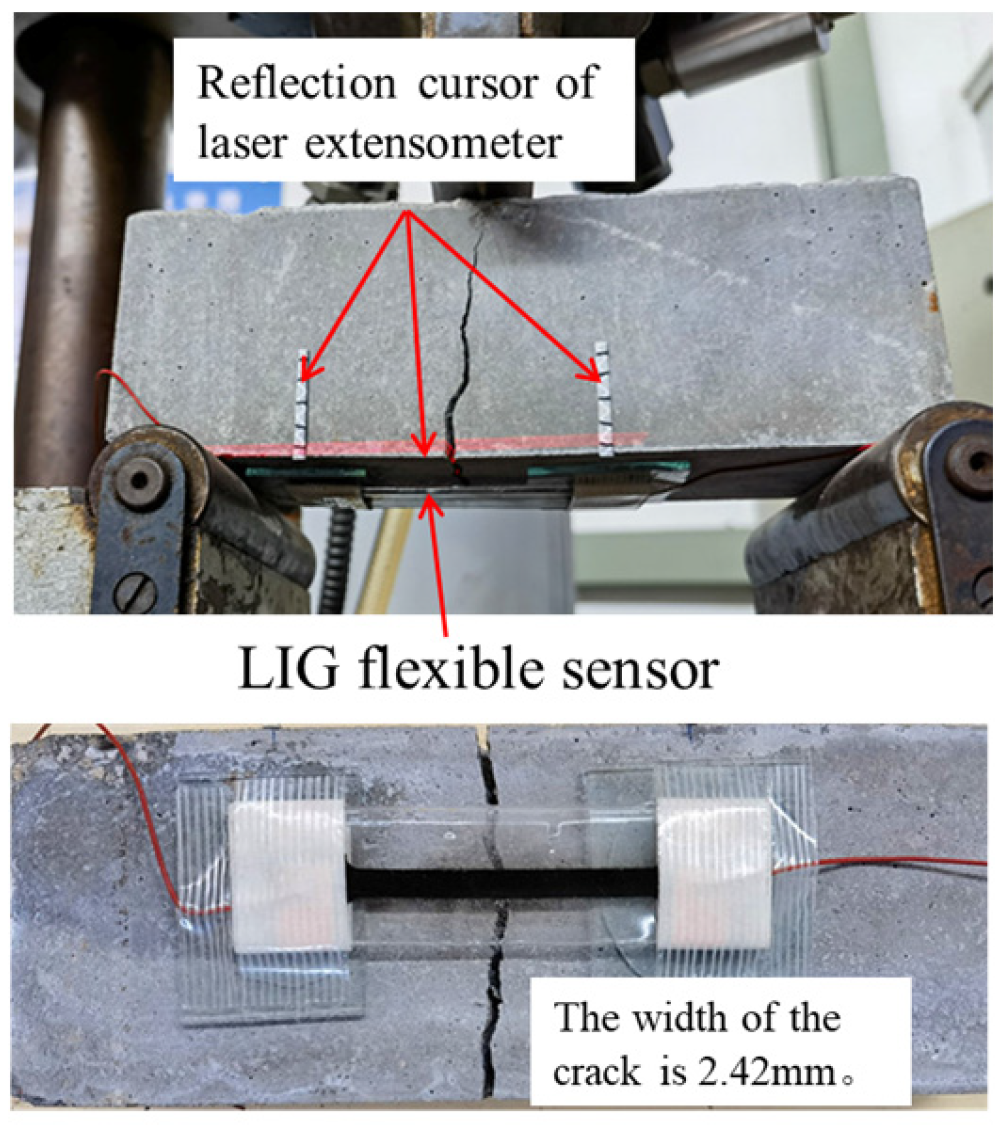
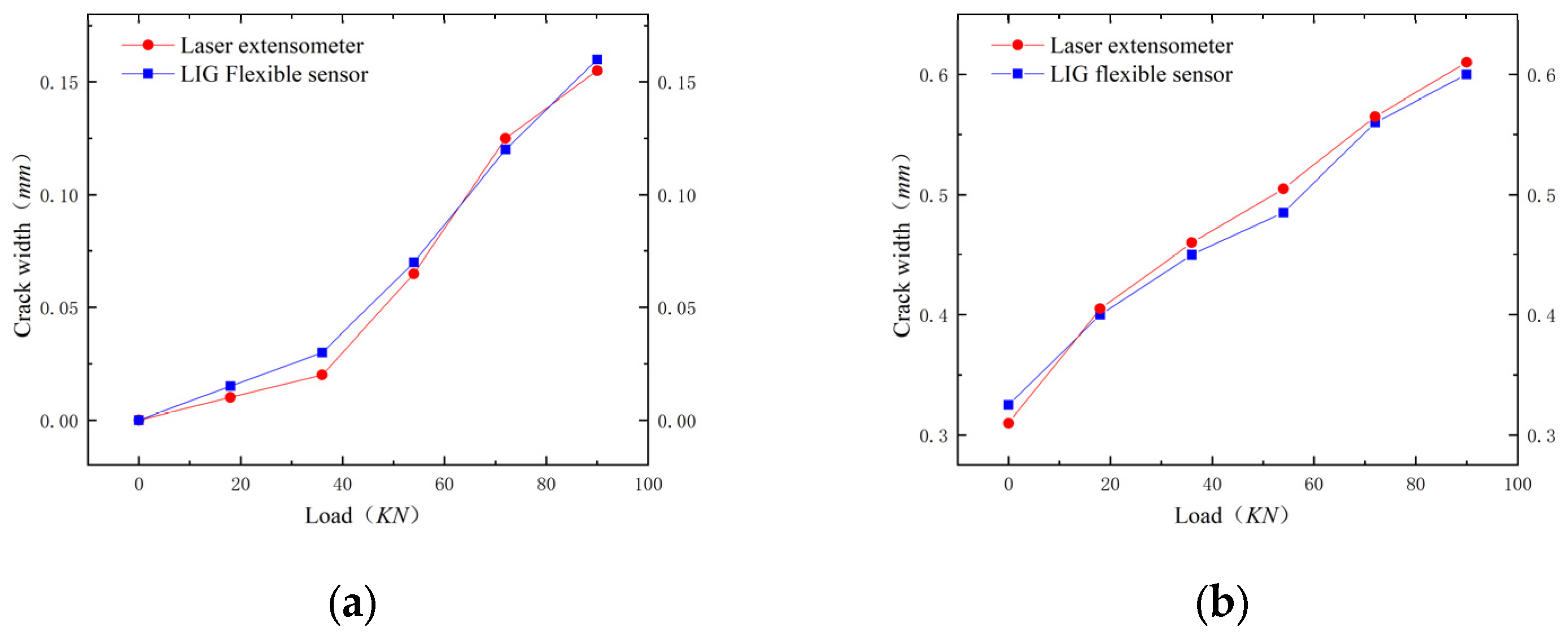
4.1. Large Deformation Monitoring of RC Structures
4.2. Anti-Fatigue Performance of Flexible Sensors
5. Conclusions
- (1)
- The preparation method of the LIG flexible sensor is simple and cost-effective. Protected by the PDMS substrate, the sensor is not easily damaged and is suitable for repeated use.
- (2)
- The LIG flexible sensor has a strain measurement range of 12%, which demonstrates its significant effectiveness in monitoring structural cracks and damage.
- (3)
- Through fatigue experiments conducted on full-scale beams, it is further verified that the LIG sensor exhibits an excellent reversible resistance response. After 200,000 cycles of fatigue loading, it still maintains good testing performance, indicating its applicability in the long-term monitoring of large deformations in reinforced concrete beams.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, J.; Li, D.P.; Yue, Q.R. Key scientific issues and state-of-art in whole-lifecycle intelligentization of buildings and infrastructures. Bull. Natl. Nat. Sci. Found. China 2021, 35, 620–626. [Google Scholar]
- Qin, H.G. Materials for Civil Engineering; Southeast University Press: Nanjing, China, 2021; pp. 154–196. [Google Scholar]
- Xu, B.; Zeng, X. Experimental study on the behaviors of reinforced concrete beams under impact loadings. Chin Civ. Eng. J. 2014, 47, 41–47. [Google Scholar]
- Li, L.L.; Zhou, S.T.; Zhou, J.F.; Dong, X.J.; Su, Z.L.; Zhang, D.S. 3D Coordinates Measurement of Strain Gauges on Structures Based on the Single Camera. Struct. Environ. Eng. 2022, 49, 42–47. [Google Scholar]
- Barrias, A.; Casas, J.R.; Villalba, S. Embedded distributed optical fiber sensors in reinforced concrete structures—A case study. Sensors 2018, 18, 980. [Google Scholar] [CrossRef] [PubMed]
- Xing, G.H.; Huang, J.; Luo, X.B.; Chang, Z.Q. Crack Calculation and Analysis of Concrete Beams Strengthened with Near-surface Mounted Prestressed Aluminium Alloy Bars. Eng. Mech. 2022, 39, 171–181. [Google Scholar]
- Weng, S.; Zhang, Z.Y.; Gao, K.; Zhu, H.P. Research Progress of Flexible Piezoresistive Strain Sensing Technology in the Field of Structural Health Monitoring. J. Build. Struct. 2024, 45, 242–261. [Google Scholar]
- Kang, I.; Schulz, M.J.; Kim, J.H.; Shanov, V.; Shi, D. A carbon nanotube strain sensor for structural health monitoring. Smart Mater. Struct. 2006, 15, 737–748. [Google Scholar] [CrossRef]
- Almubaied, O.; Chai, H.K.; Islam, M.R.; Lim, K.S.; Tan, C.G. Monitoring corrosion process of reinforced concrete structure using FBG strain sensor. IEEE Trans. IEEE Trans. Instrum. Meas. 2017, 66, 2148–2155. [Google Scholar] [CrossRef]
- Bao, Y.Q.; Li, H. Artificial intelligence for civil engineering. China Civ. Eng. J. 2019, 52, 1–11. [Google Scholar]
- Beladi-Mousavi, S.M.; Salinas, G.; Antonatos, N. Fine-tuning the functionality of reduced graphene oxide via bipolar electrochemistry in free standing 2D reaction layers. Carbon 2022, 191, 439–447. [Google Scholar] [CrossRef]
- Smita, K.M.; Abraham, L.S.; Kumar, V.G. Biosynthesis of reduced graphene oxide using turbinaria ornata and its cytotoxic effect on MCF-7cells. IET Nanobiotechnol. 2021, 15, 455–464. [Google Scholar] [CrossRef] [PubMed]
- Lei, C.; Zhang, J.N.; Liu, R.F. Resistive Humidity Sensor Based on Reduced Graphene Oxide Material. Micronanoelectronic Technol. 2021, 58, 992–997. [Google Scholar]
- Xiang, D.; Zhang, X.Z.; Chen, X.Y. High-performance flexible piezoresistive strain sensor based on biaxially stretched conductive polymer composite films with reduced graphene oxide-carbon nanotubes. Acta Mater. Compos. Sin. 2022, 39, 1120–1130. [Google Scholar]
- Rabchinskii, M.K.; Sysoev, V.V.; Varezhnikov, A.S.; Solomatin, M.A.; Struchkov, N.S.; Stolyarova, D.Y.; Ryzhkov, S.A.; Antonov, G.A.; Gabrelian, V.S.; Cherviakova, P.D.; et al. Toward On-Chip Multisensor Arrays for Selective Methanol and Ethanol Detection at Room Temperature: Capitalizing the Graphene Carbonylation. ACS Appl. Mater. Interfaces 2023, 15, 28370–28386. [Google Scholar] [CrossRef]
- Rui, C.; Tao, L.; Da, G.; Zheng, S.; Wei, Z. Facile fabrication of a fast-response flexible temperature sensor via laser reduced graphene oxide for contactless human-machine interface. Carbon 2022, 187, 35–46. [Google Scholar]
- Dinh, L.T.S.; Phan, H.P.; Kwon, S. Recent advances in Laser-induced grapheme: Mechanism, abrication, properties, and applications in flexible electronics. Adv. Funct. Mater. 2022, 32, 2205158. [Google Scholar]
- Huang, L.; Su, J.; Song, Y. Laser-induced graphene: En route to smart sensing. Nano-Micro Lett. 2020, 12, 157. [Google Scholar] [CrossRef]
- Raza, T.; Tufail, M.K.; Ali, A. Wearable and flexible multifunctional sensor based on laser-induced graphene for the sports monitoring system. ACS Appl. Mater. Interfaces 2022, 14, 54170–54181. [Google Scholar] [CrossRef]
- Jeong, S.Y.; Ma, Y.W.; Lee, J.U. Flexible and highly sensitive strain sensor based on laser-induced graphene pattern fabricated by 355 nm pulsed laser. Sensors 2019, 19, 4867. [Google Scholar] [CrossRef]
- Zhu, Y.; Cai, H.; Ding, H. Fabrication of low-cost and highly sensitive graphene-based pressure sensors by direct laser scribing polydimethylsiloxane. ACS Appl. Mater. Interfaces 2019, 11, 6195–6200. [Google Scholar] [CrossRef]
- Wei, Q.X.; Xiao, M.C.; Aniqa, J.; Yan, Z.; Quan, G.; Jun, W.T.; Xiao, L.M.; Wei, Y.W.; Jin, M.C. High-Performance Graphene Flexible Sensors for Pulse Monitoring and Human–Machine Interaction. ACS Appl. Mater. Interfaces 2024, 16, 32445–32455. [Google Scholar]
- Wu, Z.Q.; Wei, J.; Dong, R.Z. Epoxy composites with reduced graphene oxide-cellulose nanofiber hybrid filler and their application in concrete strain and crack monitoring. Sensors 2019, 19, 3963. [Google Scholar] [CrossRef] [PubMed]
- Wu, Z.Q.; Wei, J.; Dong, R.Z. Graphene-based piezoresistive composite and application in crack monitoring. J. Zhejiang Univ. Eng. Sci. 2020, 54, 233–240. [Google Scholar]
- You, R.; Liu, Y.Q.; Hao, Y.L. Laser fabrication of graphene-based flexible electronics. Adv. Mater. 2020, 32, 1901981. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| a | b | c | d | |
|---|---|---|---|---|
| Strain (%) | 0 | 6 | 10 | 12 |
| (Ω) | 0 | 0.07 | 0.3 | 1.5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, L.; Cai, C.; Qian, Z.; Li, P.; Zhu, F. Application of Laser-Induced Graphene Flexible Sensor in Monitoring Large Deformation of Reinforced Concrete Structure. Sensors 2024, 24, 7444. https://doi.org/10.3390/s24237444
Liu L, Cai C, Qian Z, Li P, Zhu F. Application of Laser-Induced Graphene Flexible Sensor in Monitoring Large Deformation of Reinforced Concrete Structure. Sensors. 2024; 24(23):7444. https://doi.org/10.3390/s24237444
Chicago/Turabian StyleLiu, Lina, Chenning Cai, Zhenghua Qian, Peng Li, and Feng Zhu. 2024. "Application of Laser-Induced Graphene Flexible Sensor in Monitoring Large Deformation of Reinforced Concrete Structure" Sensors 24, no. 23: 7444. https://doi.org/10.3390/s24237444
APA StyleLiu, L., Cai, C., Qian, Z., Li, P., & Zhu, F. (2024). Application of Laser-Induced Graphene Flexible Sensor in Monitoring Large Deformation of Reinforced Concrete Structure. Sensors, 24(23), 7444. https://doi.org/10.3390/s24237444