1. Introduction
Target recognition technology has been used in the military field to improve the early assessment of potential threats, such as missiles and hostile aircraft, and to respond with appropriate means. Reliable target recognition capabilities in coastal surveillance and air traffic control systems can also monitor and confront intrusions of illegal immigrants, smugglers, and terrorists by land or sea [
1]. In addition to the military field, target recognition algorithms that are implemented with radar systems to detect pedestrians or unexpected oncoming threats have become a breakthrough technology in the autonomous vehicle industry.
Target signatures commonly used for target recognition include wideband radar cross-section (RCS) frequency response, high-resolution range profile (HRRP), and synthetic aperture radar (SAR) images. Multiple wideband RCS frequency responses for different angles are generally used to recognize small targets compared to the system range resolution. Huang and Lee [
2] proposed a target identification method using the RCS data for three different targets. In this method, the similarity between the unknown and known targets was defined to perform a statistical classification, where the dataset was based on the RCS data that are observed in directions of different elevation and azimuth angles.
If a range profile provides sufficient information to identify a target, either the HRRP or the SAR image can be used in the target recognition process. The HRRP is a one-dimensional representation of the target characteristics obtained by expressing the distribution of target scattering points projected onto the observation axis. Despite the low computational complexity, accurate target discrimination cannot be achieved due to the possibility that similar HRRPs can be obtained from different targets [
3]. On the contrary, in the SAR images, which are expressed in a two-dimensional target scattering point distribution, the probability of having similar characteristics from different targets is relatively low, but higher computational complexity is required to obtain high-dimensional target characteristics [
4].
In terms of using the HRRPs and SAR techniques for real-time recognition, the former, which can be obtained by performing the one-dimensional inverse Fourier transform of the received signals, has an advantage over the latter, which requires complex signal processing, such as two-dimensional Fourier transforms and back projection of the HRRPs obtained from multiple angles [
5,
6]. However, as Novak evaluated in [
7], the classification results from two-dimensional algorithms using SAR images show better performance than those from one-dimensional HRRPs.
Over the past few decades, numerous studies have been conducted to secure both performance and computational efficiency, which can be divided into two main categories according to their approaches. Studies in the first category are focused on developing effective feature extraction methods as preprocessing techniques prior to classification. Numerous feature extraction methods have been introduced since the early 2000s, including principal component analysis (PCA) [
8,
9,
10,
11,
12] and linear discriminant analysis (LDA) [
13,
14,
15,
16], and their common purpose was mainly to reduce redundancy and dimensionality in extracting a feature vector for a given target. Studies in the second category are focused on designing robust classifiers, such as the Bayesian decision-based classifier, pattern recognition-based classifier and neural network-based classifier [
17,
18]. With advances in computing and information technologies, object classification capabilities of machine learning (ML) methods, such as the support vector machine (SVM) [
19,
20] and the extreme learning machine (ELM) [
21], have been widely utilized in the field of target recognition.
However, since both approaches are biased towards the processing of the acquired data, they cannot be freed from the inherent limitations of the target signature itself, which are mentioned in the fourth paragraph of this article. To mediate the trade-off between classification accuracy and computational load in target recognition, some studies on developing the estimation method of target scattering centers have been conducted since the early 2000s.
Kyung-Tae Kim and Hyo-Tae Kim [
22] proposed a new method that estimates two-dimensional locations of target scattering centers using a set of one-dimensional down-range locations and associated amplitudes over several aspect angles. In this method, the one-dimensional total least squares estimation of signal parameters was applied via rotational invariance techniques, and an intersection point equation based on geometric techniques, such as projection and triangulation, was derived to provide input training data for multiple elastic modules (MEMs). As a result, the two-dimensional locations of target scattering centers were estimated using an iterative scheme for MEM network optimization. The authors showed better estimation accuracy and computational complexity compared to the well-known two-dimensional matrix enhancement and matrix pencil technique. However, it is also stated that the algorithm tends to rely on the initial guess of module center locations due to its iterative nature, and the computational complexity can be significantly increased when the number of aspect angles increases.
Jianxiong et al. [
23] proposed a reconstruction method, which estimates three-dimensional scattering centers from multiple HRRPs without knowledge of aspect angles or relative radar-target movement based on the signal space estimation method. In this method, the singular value decomposition technique was used to estimate signal subspace, and the performance was evaluated by Cramer–Rao Lower Bounds of the reconstruction problem. However, the uniqueness of the solution in the algorithm could not be ensured due to an arbitrary rotation matrix between the reconstructed and real scattering center coordinates. To overcome the ambiguity in [
23], Jun et al. [
24] developed a parameter matrix based on the geometric projection of the scattering center on the line of radar sight in multi-aspect, which is unique for any rotational translation. The effectiveness of the method was investigated for a flat-bottomed cone target with five scattering points, and the authors emphasized the advantages in resolution, stability, data requirement, and computational complexity. Recently, Su et al. [
25] pointed out the ambiguity in [
23] and the degradation of performance with increasing numbers of scattering centers and pulses. In this article, the authors divided the spatial target scattering centers with micro-motion properties into two types: stable and sliding scattering centers. Based on the factorization method used [
24], the coordinates of stable and sliding scattering centers were reconstructed in three-dimensional and two-dimensional space, respectively. However, this method still cannot ensure the uniqueness of the solution, and at least six aspect angles are required to perform the scattering center estimation.
Ji-Hoon Bae and Kyung-Tae Kim [
26] proposed a compressive sensing (CS)-based two-dimensional scattering center extraction (SCE) technique to extract scattering centers from incomplete radar cross-section (RCS) data. Unlike traditional methods, this approach is designed to accurately extract scattering centers when some RCS data are missing. However, due to the nature of the compressive sensing technique used in the proposed method for estimating scattering centers, the method inherently has high computational complexity.
Jianxiong et al. [
27] proposed a method for estimating a global 3D scattering center model using multiple HRRPs. In this method, the HRRPs obtained from various angles are visualized on an OTSM (One-Two/Three-Dimensional Scatter Map), and a Hough Transform is then applied to automatically convert the 1D projection positions into 3D scattering centers. In [
28], the 3D scattering centers of the target obtained using the method from [
27] were pre-acquired and then used to build a database for SAR image-based automatic target recognition.
In summary, the methods described in [
27,
28] involve observing the target model of interest from numerous aspect angles and investing significant computational resources to estimate the global 3D scattering center model before new observations and identification. This model is then used to build a database necessary for target recognition using SAR images.
However, the method proposed in this paper can acquire target signatures with less computational complexity than the SAR images in environments where moving targets are being tracked, serving as an alternative to the SAR images. Therefore, it differs in purpose from the methods in [
27,
28]. Additionally, due to the computational complexity of the dataset required in [
27] and the Hough Transform, the proposed method has significantly lower computational requirements compared to [
27].
There is a certain trade-off between the estimation accuracy and computational load, both proportional to the number of dimensions to be processed. Therefore, we propose a method for constructing target signatures that provides dimensional qualities similar to those of a SAR technique with greatly reduced computational load. In the proposed method, the geometric relationship between multiple HRRPs and the location of scattering centers was used to define an error function based on the least-squares method (LSM), and two-dimensional locations of target scattering centers were estimated to represent the points, such as edges, corners, and planes, where the RCSs were expected to be large. Compared to the previous methods in [
22,
23,
24,
25], the estimation performance of the algorithm is fully proportional to the quality of HRRPs obtained by the radar system, and only three aspect angles of HRRP are required to ensure the uniqueness of the result. In addition, the estimation process is applicable even in an environment in which the number of visible scattering centers varies depending on the observation angle. Due to the non-iterative nature based on the geometric approach, the computational complexity of the proposed algorithm can be significantly reduced.
The remainder of this article is organized as follows. In
Section 2, the scattering center estimation method for a point target model is developed using multiple HRRPs and expanded to be applicable for an actual target model. The computational complexity of the method is compared to that of the conventional techniques. In
Section 3, the numerical and experimental results of scattering center estimation are provided using measured HRRPs from three different types of aircraft and applied to the conventional classifier to confirm its target classification performance. Finally, conclusions are given in
Section 4.
2. Scattering Center Estimation
In this section, a strategy for the two-dimensional estimation of radar target scattering centers is developed based on multiple HRRPs and their geometric relations. The multiple HRRPs are assumed to be obtained in the same manner as a spotlight-mode-SAR observation model that collects radar signals for various aspect angles by continuously steering the radar beam at a target on a rotating platform [
29].
2.1. Point Target Model
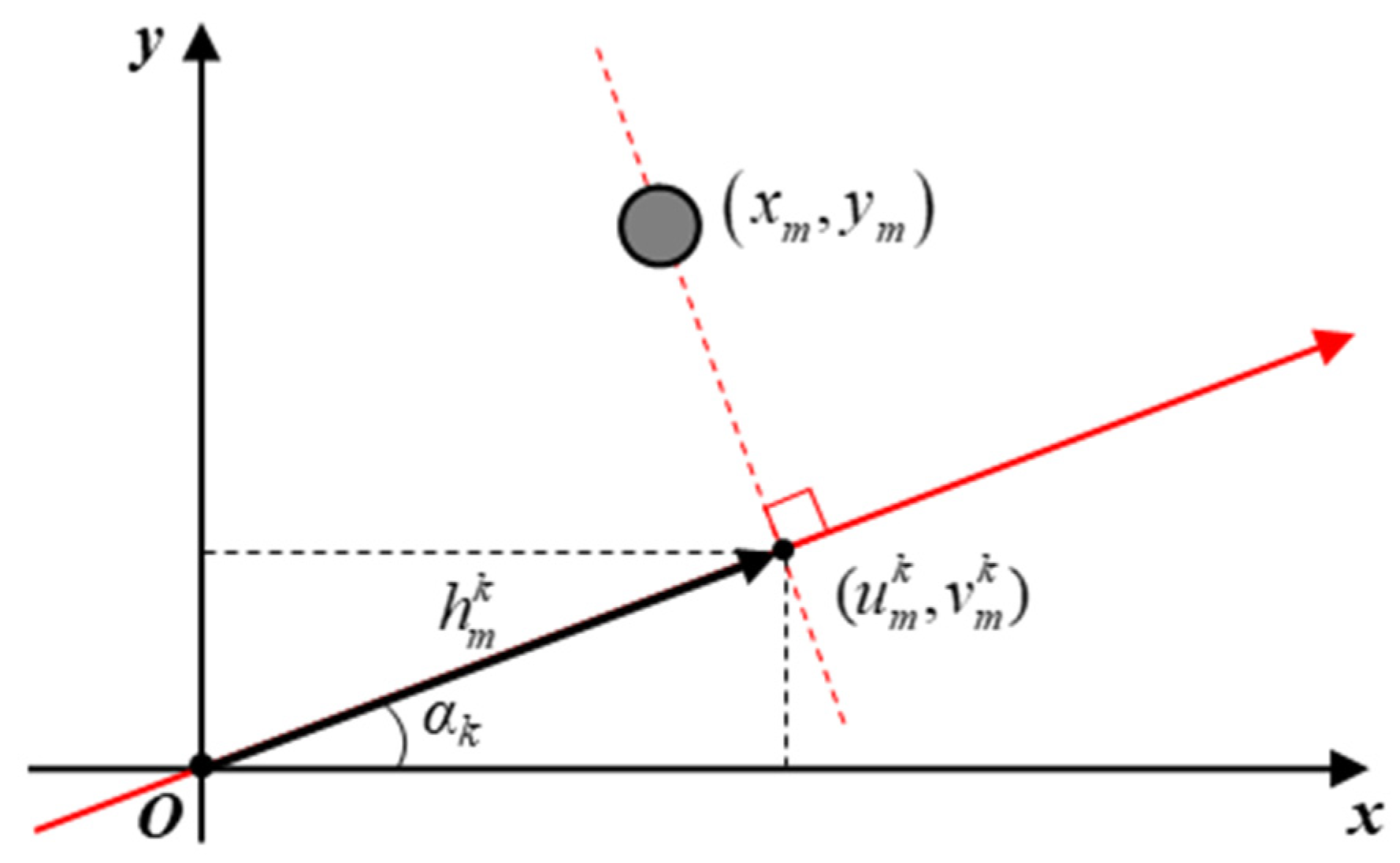
The HRRP contains the range information of target scattering centers projected onto the observation axis. A basic geometric concept of the HRRP projection is shown in
Figure 1. Since
is the point at which the scattering center
is projected onto the observation axis, the range profile can be expressed as
where
is the profile which contains range information of the
m-th scattering center with the
k-th observation angle
αk. The range profile in (1) can be obtained from the peak location in the HRRP, which is the inverse discrete Fourier transform of the received signal in the frequency domain. Therefore, the resulting magnitude of
in (1) is equal to the distance of a point
from the origin.
Using the obtained range profile with known value of
, the projected point
can be defined as
The imaginary line passing through (2) and perpendicular to the observation axis can be formulated as
Substituting (2) in (3), another expression for the range profile
can be obtained by
By the definition of (4), the same range profile can be obtained from any point on the imaginary line passing through the projected point and perpendicular to the observation axis. Clearly, the real scattering center
is located on the line defined by (4), which yields (1), but it is impossible to inversely specify the exact location from
alone. Therefore, in the case shown in
Figure 1, more range profiles are needed to decide the exact coordinate of the scattering center. With the help of several range profiles obtained from different observation angles, a set of simultaneous equations from (4) can be derived, which can be finally solved for the unknown coordinates of scattering centers.
Once the multiple HRRPs are obtained for
M scattering centers with
K observation angles, the total dataset can be expressed in matrix form as
where
The rows and columns of h represent the obtained HRRPs for different angles and scattering centers, respectively. The x matrix contains two-dimensional location of scattering centers, and P is the projection matrix, whose column vectors are .
Considering
K observations, the simultaneous equations for the
m-th scattering center can be expressed in the matrix form as
where
is the 1-by-
K size row vector whose elements are
and
is the row vector that contains the location of scattering center
.
Based on the LSM, the location of
m-th scattering center can be estimated by matrix inversion of (6) as follows:
where (∙)
† is the pseudo-inverse operation. As stated above, the two-dimensional location of a single scattering center is able to be specified by finding the solution of simultaneous equations in (7), which can be described as the intersection point of the vertical lines from two different HRRPs. However, there are two issues to be simultaneously considered under the general circumstances: authenticity of the solution and the matching problem.
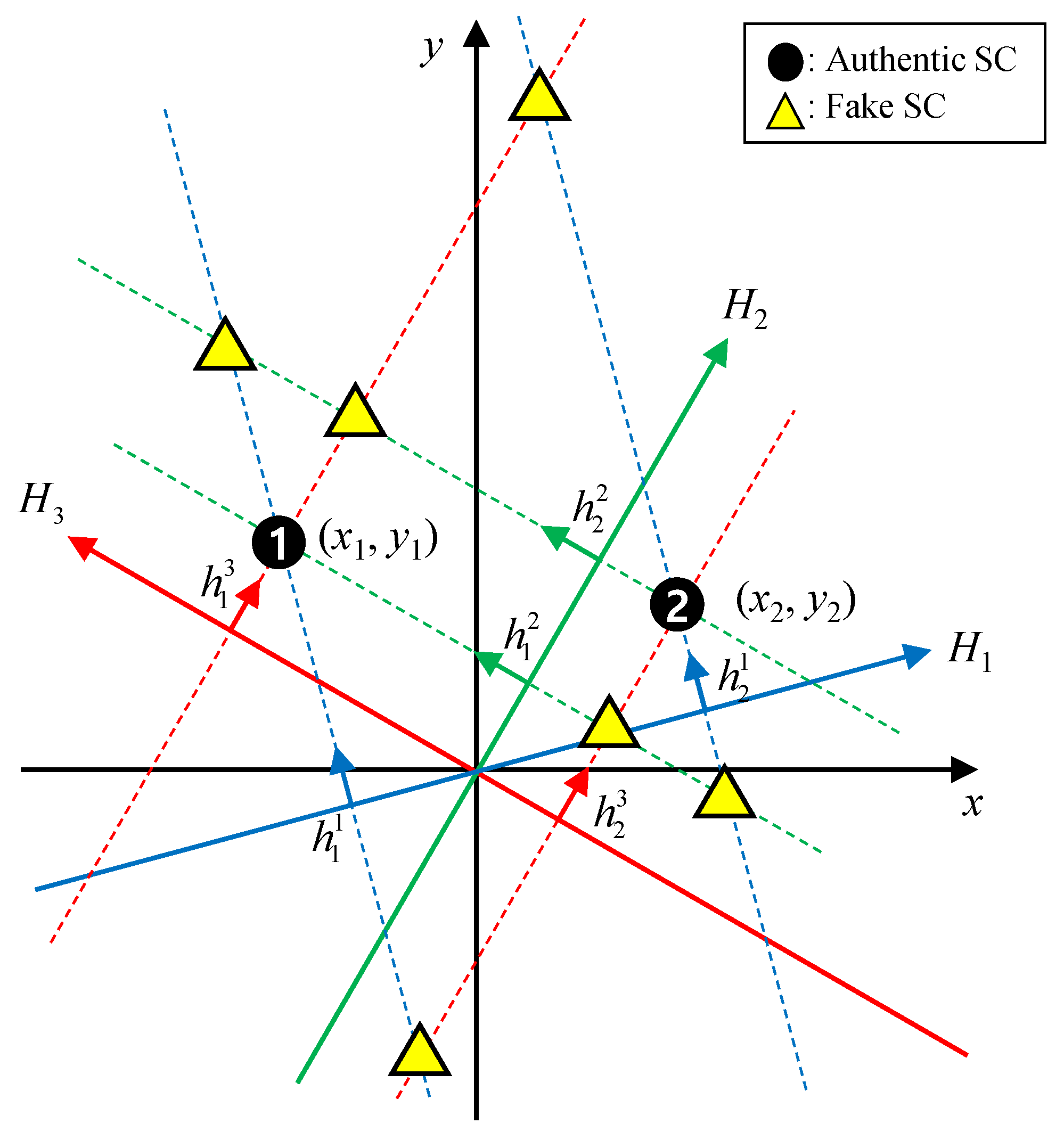
As shown in
Figure 2, the targets are observed in the form of peaks on the HRRP axes, but they appear in different order depending on the observation angle, so the target scattering center index
m for each peak is actually unknown. If the components of matrix
h in (5) are ‘mismatched’ to the order of actual targets, the unique solution cannot be obtained.
Figure 3 shows an example of two scattering centers observed from three different angles. The dotted lines represent the vertical lines passing through the projected scattering centers on each HRRPs, derived as in (4). In
Figure 3, two observation axes of
and
generate four intersections of
and
. Of these four points, only two intersections, created by
and
, are the authentic scattering centers, while the other two are not. Therefore, to sort out the real solution, one more range profile
is needed. As shown in
Figure 3, the authentic scattering centers are located only when the three vertical lines intersect, which means the unique solution of (7) can be obtained when
.
However, even with the three range profiles, the three vertical lines may not intersect, as the components of h may still be mismatched, resulting in the obtaining of an incorrect solution of (7). In this case, the LSM places the solution point at the center of gravity of the triangle formed by the three lines. Therefore, to overcome the matching problem, an authentication algorithm is proposed based on the error defined by the geometric property of all possible combinations of HRRP peaks.
The number of combinations can be calculated as
where
is the number of peaks on
k-th observation axis. In most cases,
is equal to the number of scattering centers
M, but it may be less depending on the location of the scattering centers and observation angle.
To sort out the matched combinations, each of them is used as a HRRP vector in (7) to estimate the scattering center
. If the incorrect combination was used, the unique solution cannot be obtained, resulting in
being located at the center of gravity of the triangle formed by the mismatched combination of HRRP vertical lines. Therefore, an error function can be defined based on the geometric relationship between each combination of HRRP peaks and the HRRP recalculated from the point estimated by the corresponding combination. The error function is defined as
where
denotes the estimated location of the scattering center from
, the
i-th combination of HRRP peaks, and ‖∙‖
2 denotes the
L2 norm.
Theoretically, the number of zeros out of the
Q errors obtained by (9) should be equal to the number of authentic scattering centers. However, in practice, even the authentic scattering centers cannot have exactly zero errors due to the limitations of the radar measurement system. Therefore, we should introduce a threshold
to the errors to determine the authenticity. The threshold
must be less than or equal to
to ensure that the target exists within the same range-bin as the measured HRRP, where
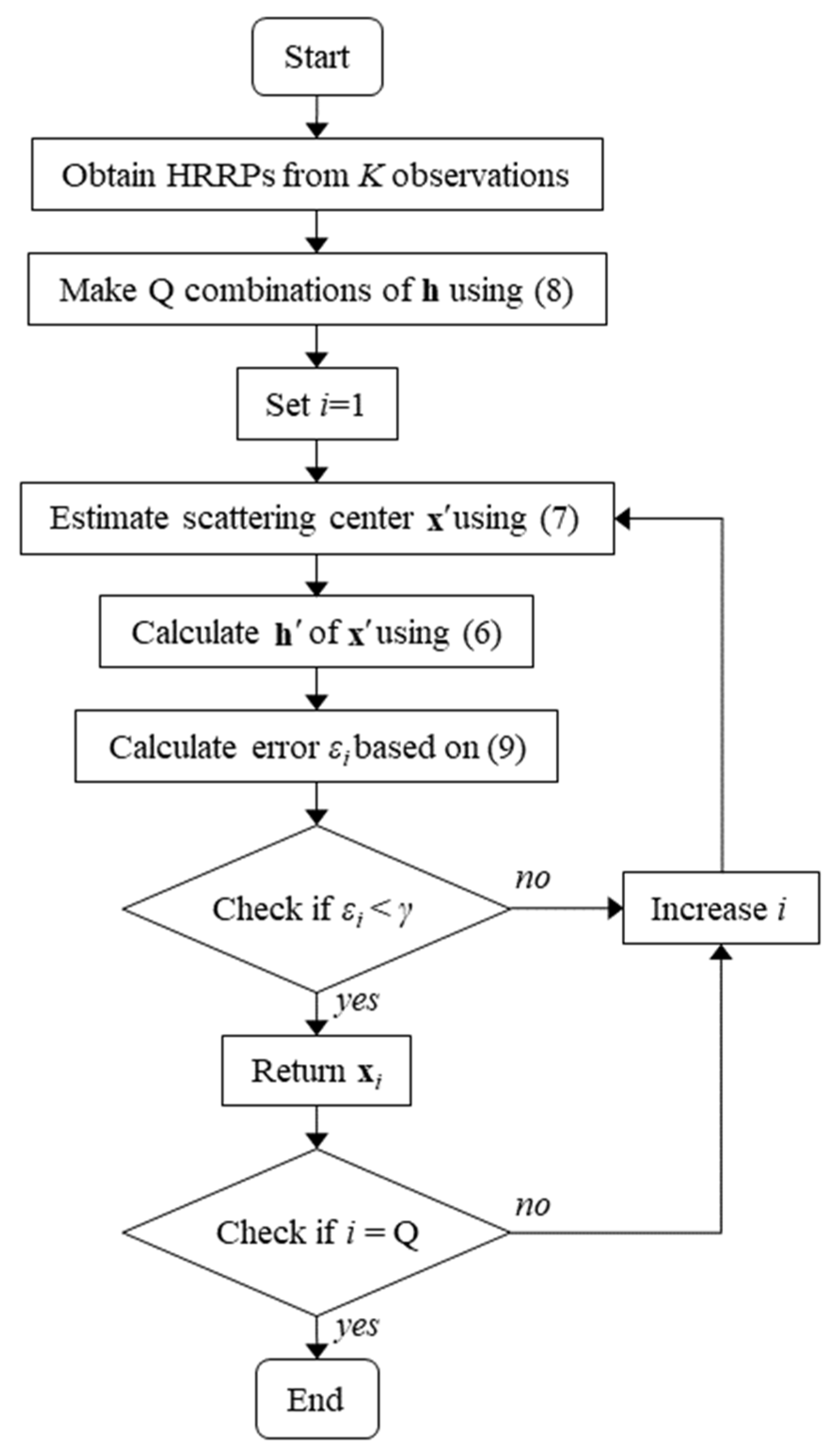
is the range resolution of the measurement system. The flowchart of the proposed algorithm is shown in
Figure 4. The overall procedure can be summarized as follows:
Step 1: Obtain HRRPs from K observations
Step 2: Make Q combinations of HRRPs by considering the number of peaks on the k-th observation axis using Equation (8)
Step 3: Estimate the scattering centers using Equation (7) for each of the Q combinations of HRRPs. Note that the scattering centers estimated in this step include fake SCs.
Step 4: Calculate the HRRPs for all estimated scattering centers using the K observations and Equation (6).
Step 5: Calculate the error between the combinations of HRRPs obtained in Step 2 and the HRRPs estimated through Step 3 and Step 4 using Equation (9).
Step 6: If the calculated error in Step 5 is smaller than the threshold, the scattering centers are classified as authentic.
2.2. Actual Target Model
The point target model assumes that all scattering centers can be observed by the radar. That is, each HRRP contains the range information for all scattering centers. However, in the actual target model, there are cases where a specific region is not visible depending on the observation angle. Fortunately, multiple HRRPs obtained from adjacent angles have the information of the scattering centers within the same area, so the proposed algorithm can be applied to estimate the entire scattering centers on the target.
Figure 5 shows the concept of choosing
K neighboring HRRPs out of the entire HRRP dataset of size
N to estimate all scattering centers around the target. In this figure,
h(
n) is the
n-th observed HRRP,
δ is the interval of each HRRP selection, and
are the
K HRRPs used for the estimation procedure. Therefore, the proposed algorithm derived for the point target model can be applied to each of the
neighboring sets. The resulting scattering points estimated through the above process are used for further processing to find the dominant scattering centers located on an object’s surface that are likely to be observed from multiple viewpoints, such as edges, corners, and planes.
Based on the property of the dominant scattering centers, we introduce an exposure factor that defines the frequency at which the scattering centers estimated using each of the neighboring HRRPs are observed in the entire dataset. The HRRPs for all observation angles of the
i-th scattering center can be calculated as follows:
where
and
p(
n) ≡ [cos(
αn), sin(
αn)]
T.
The error between the estimated HRRP
and the measured HRRP can be expressed as follows:
where min(∙) stands for the minimum value of the vector elements. To verify the existence of the scattering center at a specific observation angle, the error obtained in (11) is applied to
where
is the threshold used for the point target model.
Using (12), the exposure factor of the
i-th scattering center
is given by
The locations of the dominant scattering centers of the actual target model can be finally estimated by comparing (13) to the exposure threshold γρ.
The overall performance of the proposed algorithm depends on the values of
K and
δ. In the theoretical environment,
is a sufficient condition for two-dimensional estimation, but if the range resolution of the radar system is considered, the performance can be clearly improved in proportion to
K. However, as the value of
K increases, the computation complexity also increases as well, which is discussed in the following section. Smaller values of
δ allow more scatter centers to be estimated, but the pseudo-inverse matrix inversion of
P in (2) becomes more singular because the column vectors of the matrix
PTP are not orthogonal. Therefore, the parameter
δ should be determined considering the condition number of
P [30].
The overall estimation process for the actual target model can be summarized as follows:
Step 1: Estimate the location of the scattering centers using (7) and (9) from observed HRRP data.
Step 2: Estimate HRRP using (10).
Step 3: Calculate the error between the estimated HRRP and measured HRRP βi(n) using (11).
Step 4: Compare (11) to threshold γ to determine whether the i-th scattering center is exposed from the observation angles.
Step 5: Process all estimated scattering points through Step 2 to Step 4.
Step 6: Compare (13) to the exposure threshold to decide whether each estimated scattering center becomes the main scattering center.
2.3. Computational Complexity
In this section, the computational complexity of the proposed algorithm is calculated and compared to that of the conventional methods. For comparison under the same conditions, only the process after obtaining HRRP through S frequency samples received through N observations was considered.
The proposed algorithm selects K out of N HRRPs to construct h in (7). Since the pseudo-inverse operation P† can be pre-calculated with the knowledge of observation angles, it is excluded from the complexity derivation. Considering the matrix multiplication for Q combinations of HRRPs, the complexity can be express as using the Big-O notation. The error function in (9) uses Q scattering centers to estimate their authenticities; it also has the complexity of . For the actual target model, this process repeats approximately times for estimating total scattering centers, which is assumed to be . Finally, the estimated total scattering centers are used in (10) to calculate the HRRPs for N observation angles in order to determine their dominance.
Therefore, the complexity becomes
And with approximated
Q as
,
The computational complexity of the conventional SAR image algorithm can be expressed as the following equation [
31,
32]:
For example, in the case of K = 4, Mavg = 4, N = 121, and S = 1024, the complexities of the proposed method and SAR algorithm are and , respectively. It can be seen that the proposed method has a complexity of about 0.5% of that of the SAR algorithm.
In [
22], MEM network optimization was used in the scattering center estimation, and the associated computational complexity can be expressed as
where
z is the number of iterations of the MEM operation and
J is the number of neurons over the entire network, which is defined as
NC
2. The number of modules
P should be larger than the number of scattering points
M, and
N is the number of observations. Finally,
L is the number of neurons in one module defined as
NC
2.
In the case of
and
the complexity of the MEM-based method is
, while the proposed method has the complexity of
with
. Moreover, under the same assumption as in [
22], the method for the point target model can be used for the comparison, which means the complexity of
can be reached for the given environment. It can be seen that the proposed method has a complexity of 26.3% and 2.6% compared to the algorithm proposed in [
22].
4. Conclusions
In this paper, we proposed a new method for estimating target scattering centers from multiple HRRP datasets. These scattering centers can help obtain a high resolution image of the target and thus can also be used for the classification of the target. Based on the range information contained in multiple HRRPs obtained from various observation angles, the estimated target scattering centers could be located at the intersection points of the lines perpendicular to each of the observation axes. The computational complexity of the proposed algorithm was proven to be significantly less than that of the conventional SAR method or other methods in the previous literature.
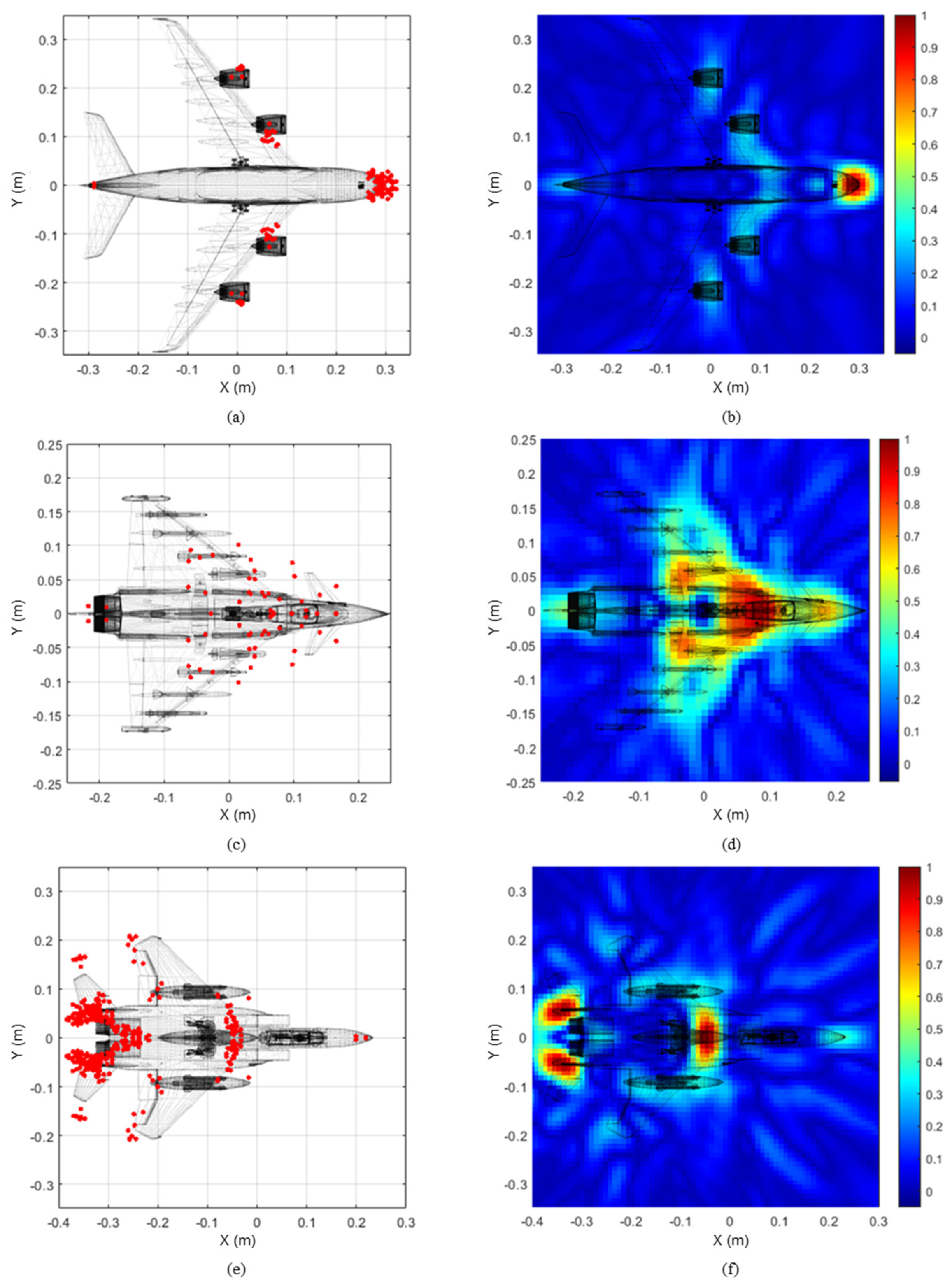
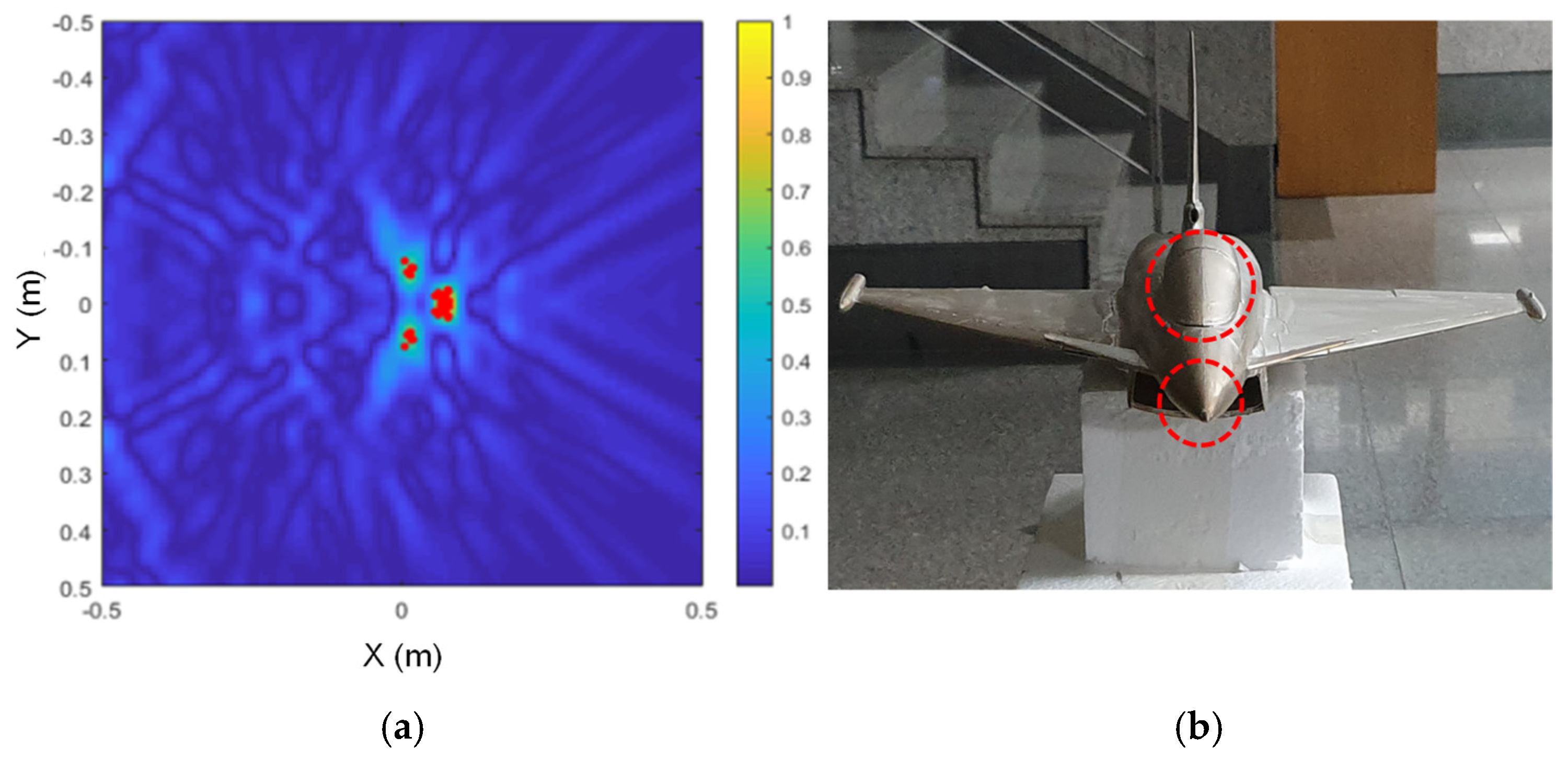
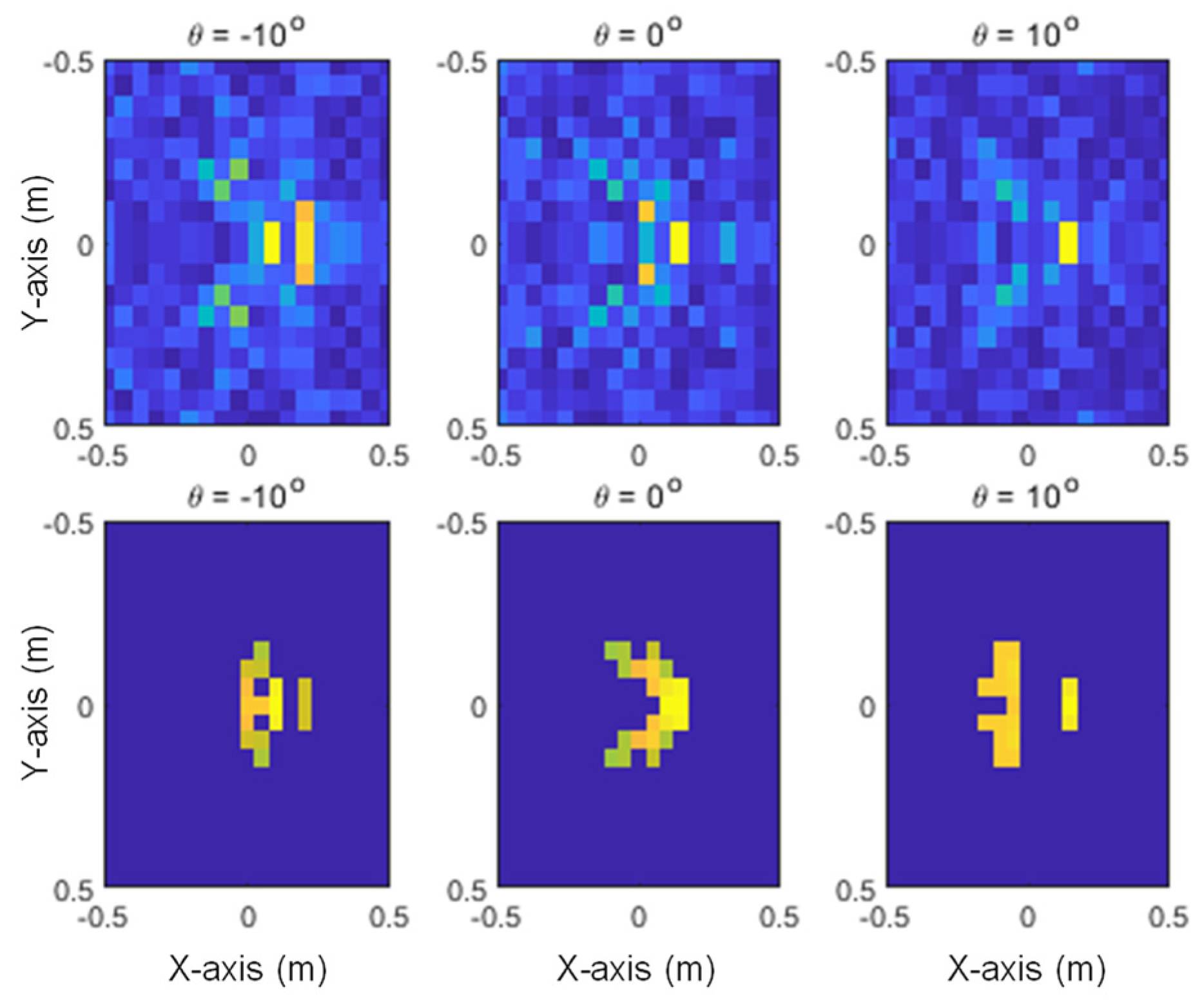
The performance of the proposed algorithm was verified by applying the multiple HRRPs measured in the experiment using the X-band radar measurement system. The system was designed using the VNA, a standard gain horn antenna, and a rotator for angle rotation, and the HRRP dataset was obtained using the received signal. As a result of estimating the scattering centers by applying the proposed algorithm to the obtained HRRPs, it was confirmed that the scattering centers can be successfully estimated at the main points of the SAR images.
Finally, a strategy for generating images was introduced to be used in the classifier from the estimated scattering centers. The classification performance using the scattering center image had a failure rate of less than 2% compared to the discrimination performance using the SAR image.
As demonstrated in this article, the proposed algorithm shows similar target classification capabilities but much less necessary computation than the SAR-based method. Therefore, the proposed algorithm is advantageous in real-time image acquisition and the reduction of the required storage capacity of the classification database, so it is expected to be used in various fields, from defense fields, such as air defense, maritime, and ground surveillance, to private industries, such as vehicle radar and drone radar.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}