2.1. Test Setup and Data Collection
Before analyzing multipath error characteristics due to multiple surfaces, the multipath effect caused by a single reflecting structure was investigated. For this purpose, the rooftop of a building (an open-sky environment) shown in
Figure 1 was selected. The only structure on the rooftop is an elevator mechanical room, and a tripod was set up in front of it. A patch antenna was placed on the tripod, and the data were recorded with a laptop. The receiver was a low-cost single-frequency u-blox EVK-M8T. Except for the elevator room shown in the picture, no structure blocked the signal in any other direction, so the effect caused by a single reflector could be accurately identified.
The data were collected for 8 h and 25 min (from 06:35 to 15:00 UTC) on 24 January 2018 at one-second intervals.
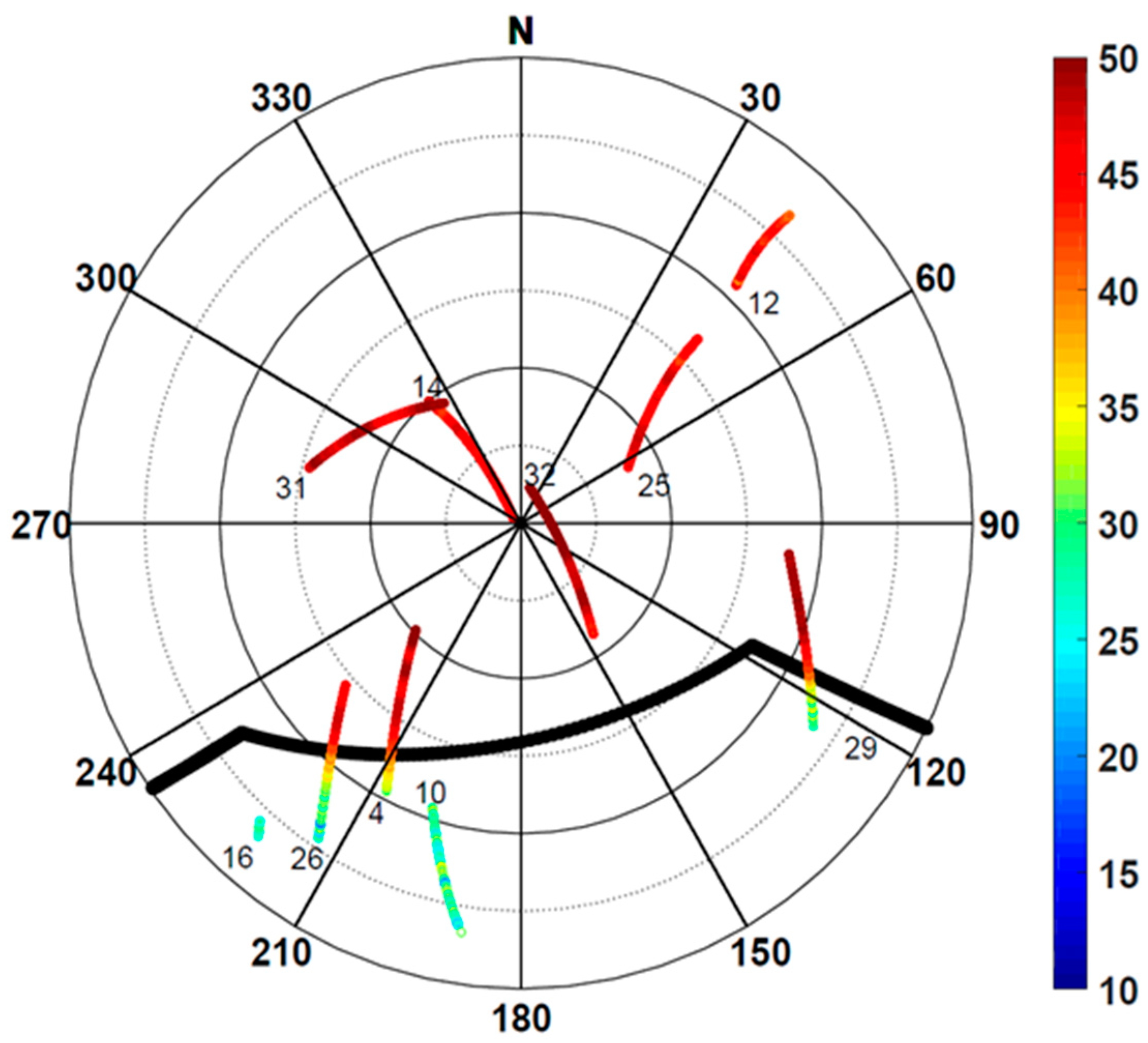
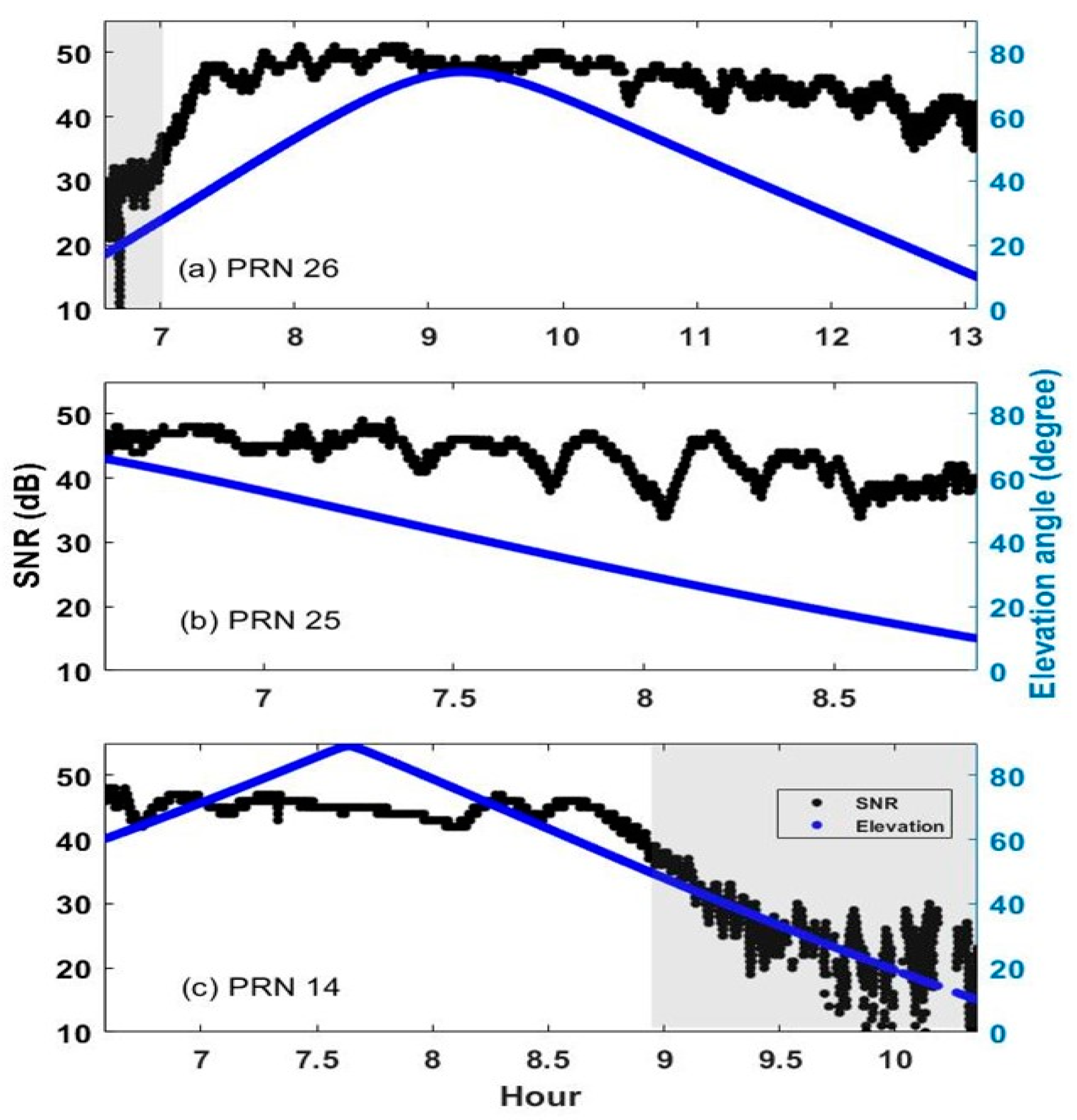
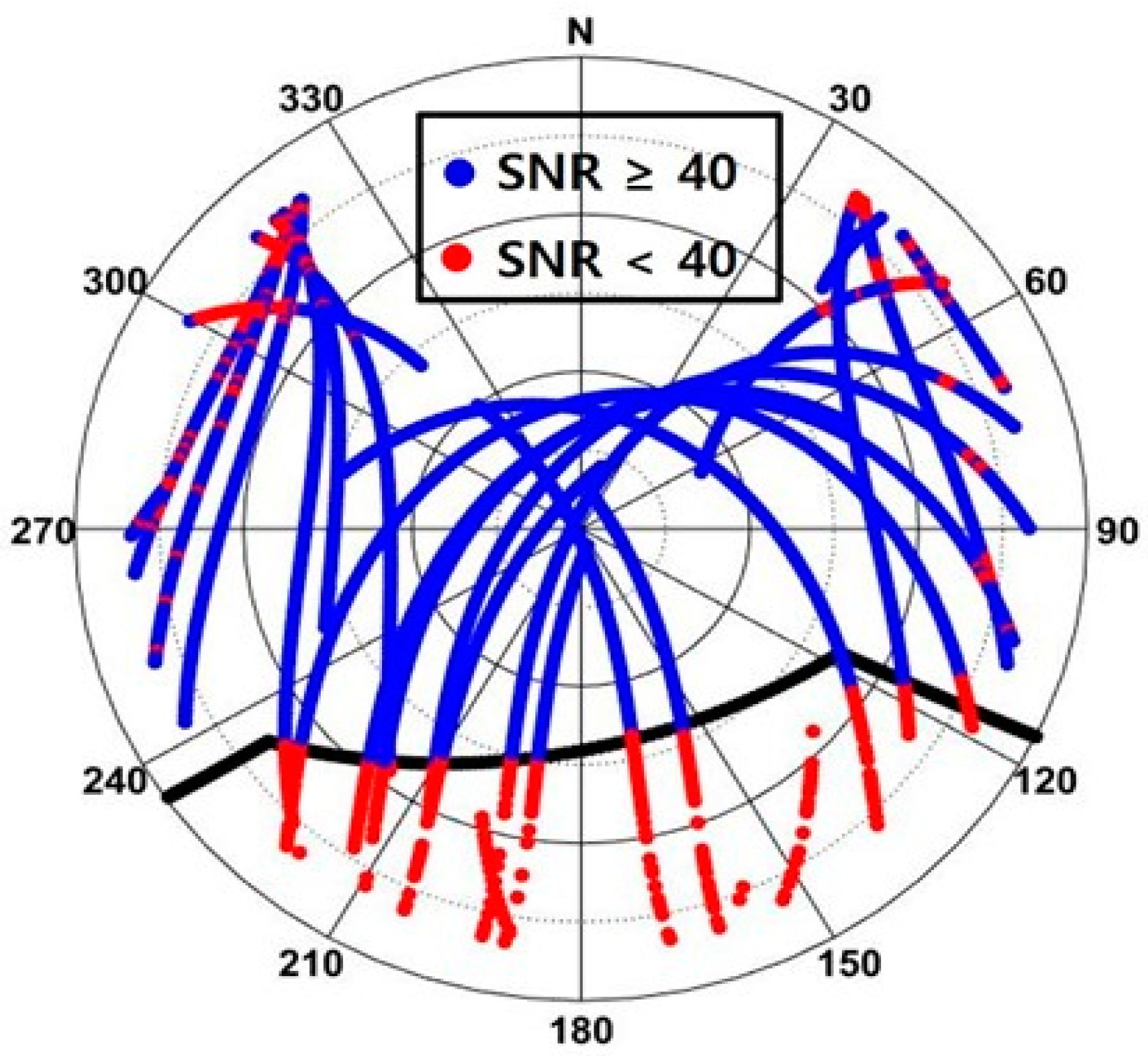
Figure 2 is a skyplot of the satellite signals received during the 60 min from 06:36 to 07:36. Each PRN number on the skyplot corresponds to the first observation point. SNR values are depicted in color as defined on the color bar. A total of 10 satellites were observed and as expected, satellites with high elevation angles showed larger SNR values.
In
Figure 2, the thick solid black line is the outline of the elevator mechanical room shown in
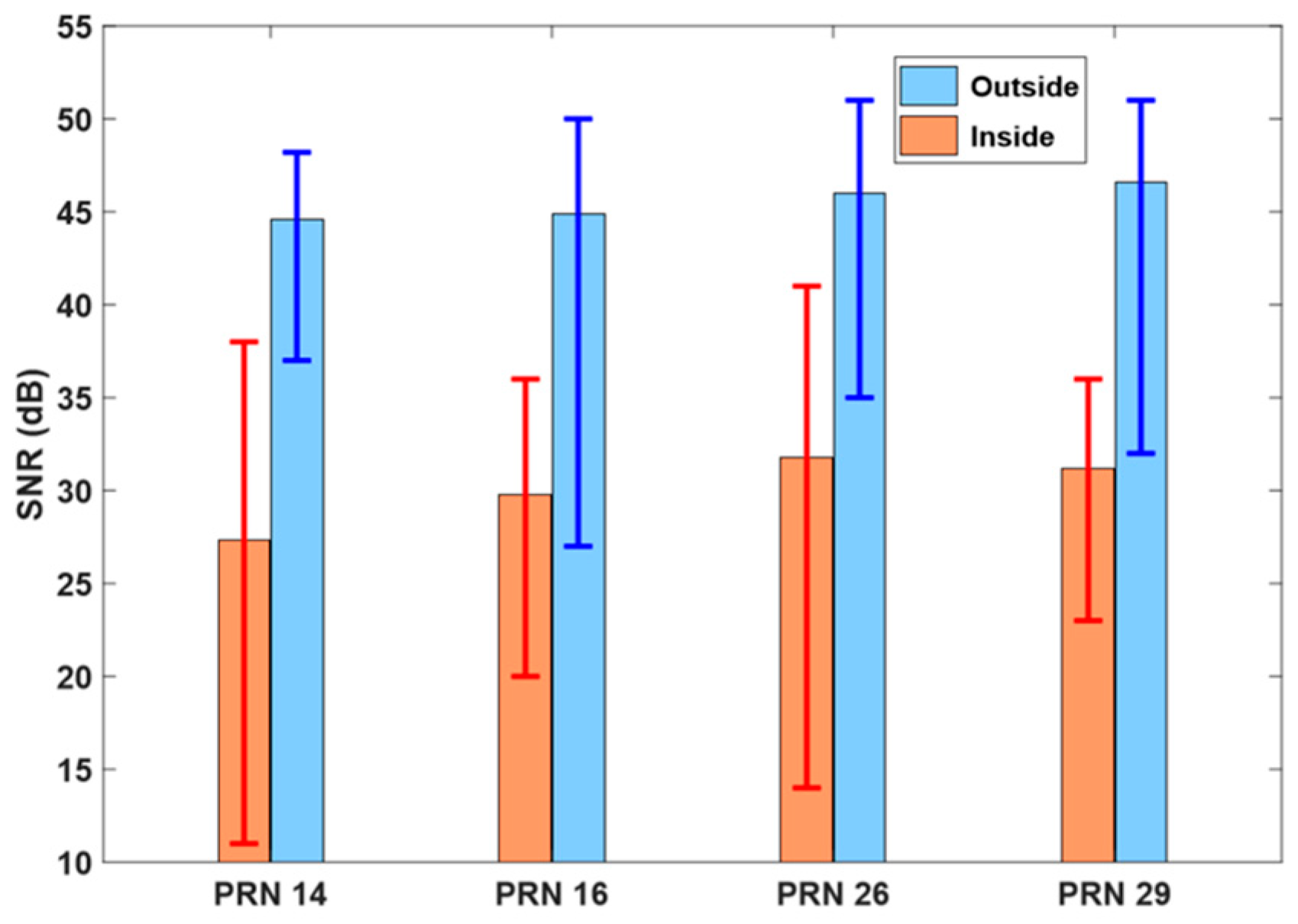
Figure 1, and the outline coordinates were obtained through RTK surveying. The room occupies azimuth angles from 120° to 240° and blocks signals with an elevation angle of less than 45° in the azimuth angle range of 150°–180°. There were five satellites with a line of sight (LoS) not secured due to obstruction, namely PRNs 4, 10, 16, 26, and 29. Among them, PRNs 4, 26, and 29 pass through the outline. These three satellites show low SNR values inside the outline, i.e., the section where the LoS is not secured. Then, the SNR increases rapidly as the signal leaves the boundary. Therefore, the signal has a low SNR due to multipath error in the area where the LoS is not secured and shows a typical magnitude of SNR values when there is no obstruction.
2.2. Range vs. Range Rate vs. Range Acceleration
We used the dataset described in
Section 2.1 to derive the range rate (RR) and range acceleration (RA). RR is the time rate of change for the pseudorange measurement, whereas RA corresponds to the second time derivative of the range. PRN 26 in
Figure 2 was observed from 06:35 to 13:06 UTC, and the pseudorange, RR, and RA measurements from 06:36 to 07:36 are depicted in
Figure 3. The upper part of the figure shows two pseudorange values; red is the observed pseudorange recorded at the receiver, whereas blue is the computed distance from the receiver to the satellite by predicting the satellite coordinates from the broadcast ephemeris.
Seen in
Figure 3a is the bias between the observed pseudorange and the calculated value; the size of the bias starts at 22,254 m and gradually decreases until it reaches 17,811 m. When converted to time, this corresponds to approximately 0.742 ms and 0.594 ms. Several types of error may have affected this bias, but the main cause is that clock errors are not modeled. In calculating the pseudoranges in
Figure 3, the satellite clock offset was modeled. Thus, it is assumed that receiver clock offsets, besides unmodeled tropospheric and ionospheric errors, affect the bias. However, bias analysis is unnecessary in this study and was not considered further. The reason should be clear in the subsequent descriptions of RR and RA computations.
Figure 3b shows the RR, which is the time change rate of the pseudorange. Since GPS satellites orbit the Earth’s center of mass and the observation point is located on the surface of the Earth, the distance between the receiver and satellite is not constant. Therefore, the time change rate of the pseudorange cannot be zero and its magnitude changes smoothly within a range of approximately ±800 m/s. One can see that PRN 26 is a rising satellite from the skyplot. Thus, the pseudorange value continuously decreased after the first observation, and its value also appears to be within ±800 m/s (from −700 to −200). As with the computed pseudorange, the
values (RRs calculated based on the receiver’s coordinates and the satellite’s orbital information) change very smoothly. On the other hand, RR values calculated from the data recorded at the receiver (
) were quite noisy from 06:36 to 07:00 when the LoS was not secured due to the elevator room. It was determined that the corresponding portion of the data was affected by the multipath effect. Because the signal was recorded at the receiver during the obstructed period, it must have been received indirectly by diffraction or reflection (in other words, under the multipath effect). We found some missing epochs believed to be caused by excessive signal interference.
The instability of the RR in
Figure 3b and the corresponding index can be used as a weight in the GNSS positioning algorithm. However, it is difficult to decide a specific number for the multipath classification criterion because the RR value depends on the satellite position and the direction of motion, even though it stays within the range from −800 to +800 m/s. What is needed for stable satellite navigation is a reasonable threshold and thus, RR cannot be a suitable candidate. For this reason, we tried the second time derivative of range, or range acceleration, which is the RR time-differentiated again.
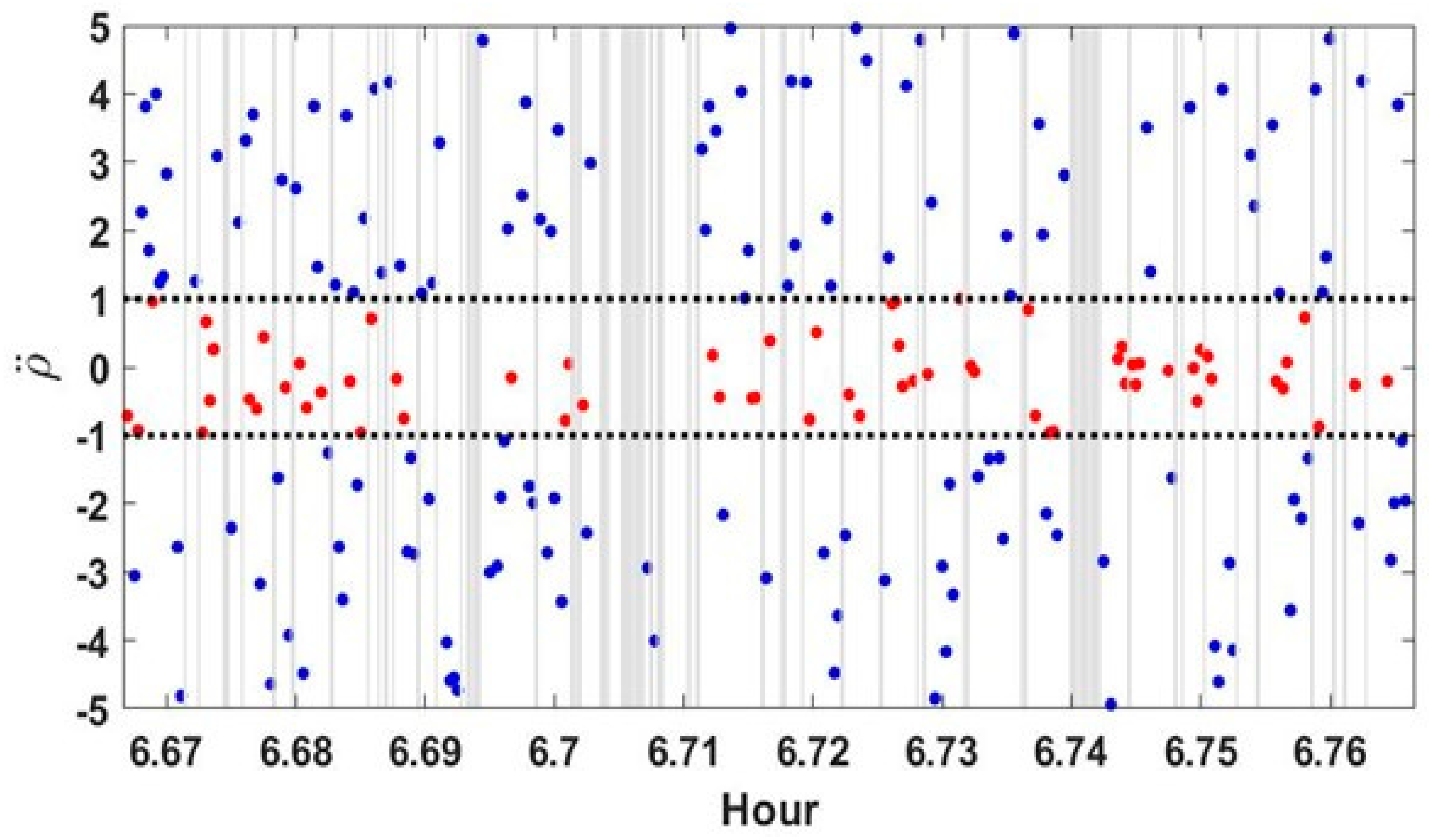
Figure 3c shows RA computations, where the calculated RA value (in blue) is almost always concentrated on the line
= 0 m/s
2. On the other hand, the RA values derived from recorded observations (
, in red) are close to zero from 07:00 to 07:36 when the LoS is secured. However, RAs rapidly fluctuated with maximum values of ±75 m/s
2 when affected by the multipath effect.
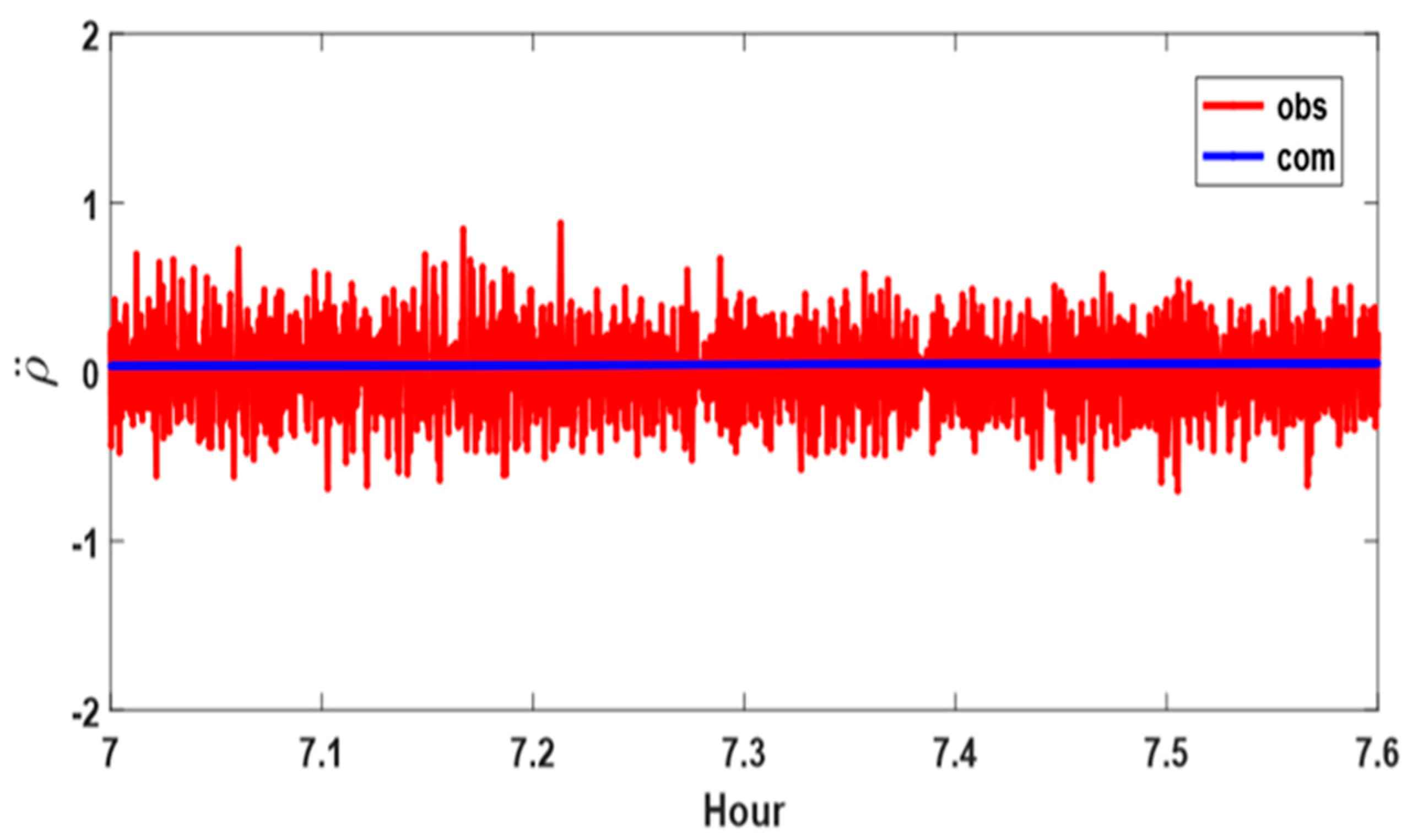
The RA time series after 07:00, when PRN 26 was completely free from the influence of the building, is shown in
Figure 4, with the vertical axis limited to ±2. This period corresponds to the situation where the LoS is perfectly secured. In
Figure 4, observe that
consistently remains along the line
= 0 m/s
2. On the other hand,
reached a maximum value of almost 1.0 m/s
2, with an average value of 0.21 m/s
2 and standard deviation of 0.15 m/s
2. In conclusion, since the RA characteristics are clearly distinguished, depending on the presence or absence of multipath error, it can be used as an index for a weight model in data processing.
2.3. Range Acceleration Computations
While the RA value of PRN 26 was close to zero when the LoS was secured, it fluctuated significantly when multipath errors occurred due to the reflector. As one can see from the skyplot in
Figure 2, visibility to satellites 4, 10, 16, and 29 was also obstructed. Therefore, we examined whether a phenomenon similar to the RA variation characteristic of PRN 26 also occurred for the four other satellites. The result is shown on the left side of
Figure 5. Looking at the temporal variation, the LoS vector to PRN 10 cannot be secured most of the time, showing the largest variations for the longest time. PRN 16, shown at the bottom of the left side of
Figure 5, exhibited relatively large variations because it was occluded throughout the analysis period.
For PRNs 26, 29, and 4, which were obscured by the elevator room and then cleared of the obstruction, RA maintained a stable value near zero after leaving the influence of the building. The right-hand side of
Figure 5 shows five satellites unaffected by the multipath interference. In contrast to the satellites on the left side, they show RA values close to zero all the time. The mean and standard deviation for
from those five satellites are, from top to bottom, 0.24 ± 0.19, 0.16 ± 0.14, 0.19 ± 0.15, 0.18 ± 0.14, and 0.24 ± 0.19 m/s
2. The mean values are all greater than zero and the maximum value was 0.24 m/s
2. Each standard deviation was less than 0.2 m/s
2. The level of noise in the RA observations for the 10 satellites is closely related to the presence or absence of signal obstruction. This is a very consistent result, validating our choice of RA as a feasible multipath effect indicator.
In an open-sky situation, RA changes smoothly, with most values close to zero. Contrarily, in a multipath-inducing environment, RA has severe noise. To use this characteristic as weight in positioning, the difference between the calculated RA and the observed RA can be used. That is, difference ( ) is a type of residual. Thus, if the difference is large, one can consider the corresponding signal to be the multipath signal. To use as a weight for data processing, must be calculated, and receiver coordinates are required. However, the reliability of the coordinates estimated in places where the observation environment is not good is bound to be low. Therefore, another index was devised to replace .
As confirmed in
Figure 3 and
Figure 4, the calculated RA value
is very close to zero and more stable than the observed RA value
. To determine the range of
values, RA was calculated for all 26 satellites observed at the Jinju Permanent GNSS station in Korea for the 12 h from 02:00 to 14:00 on 30 August 2017. The maximum value for the 26 satellites was approximately 0.081 m/s
2. This proves that the fluctuation in
is small compared to
, which shows a maximum of ±50 m/s
2 in
Figure 3. Thus,
is judged to have a negligible effect when applied as a weight to the positioning algorithm. Therefore, when range acceleration is used as a weight in the positioning algorithm, one can use
only, excluding
from
. In other words, the weight can be determined only with the pseudorange observation value recorded at the receiver, regardless of the receiver position. In the remainder of this paper,
is represented as
for simplicity.
So far, we have only conducted RA analysis for a stationary site. To simulate a moving platform, we assumed a case where the receiver moved northward from the Jinju site at 100 km/h and calculated . The absolute value showed a maximum of 0.085 m/s2 when all 26 observed satellites were considered. Therefore, we can conclude that ignoring should not pose a problem, even when moving at a high speed.
2.4. Range Acceleration as a Weight in Data Processing
For positioning accuracy analysis, we tested three noise models, namely a linear, polynomial, and exponential model denoted as follows:
Each model incorporates a variance term,
, for the measurements, with optimized parameters
and
k determined empirically. The unit for
is meters per second squared. The C/A code pseudoranges collected at one-second intervals for one hour (from 06:36 to 07:36) were used. Least squares estimation was applied to compute the receiver coordinates and the clock offset, totaling four unknowns. The true coordinates of the antenna from
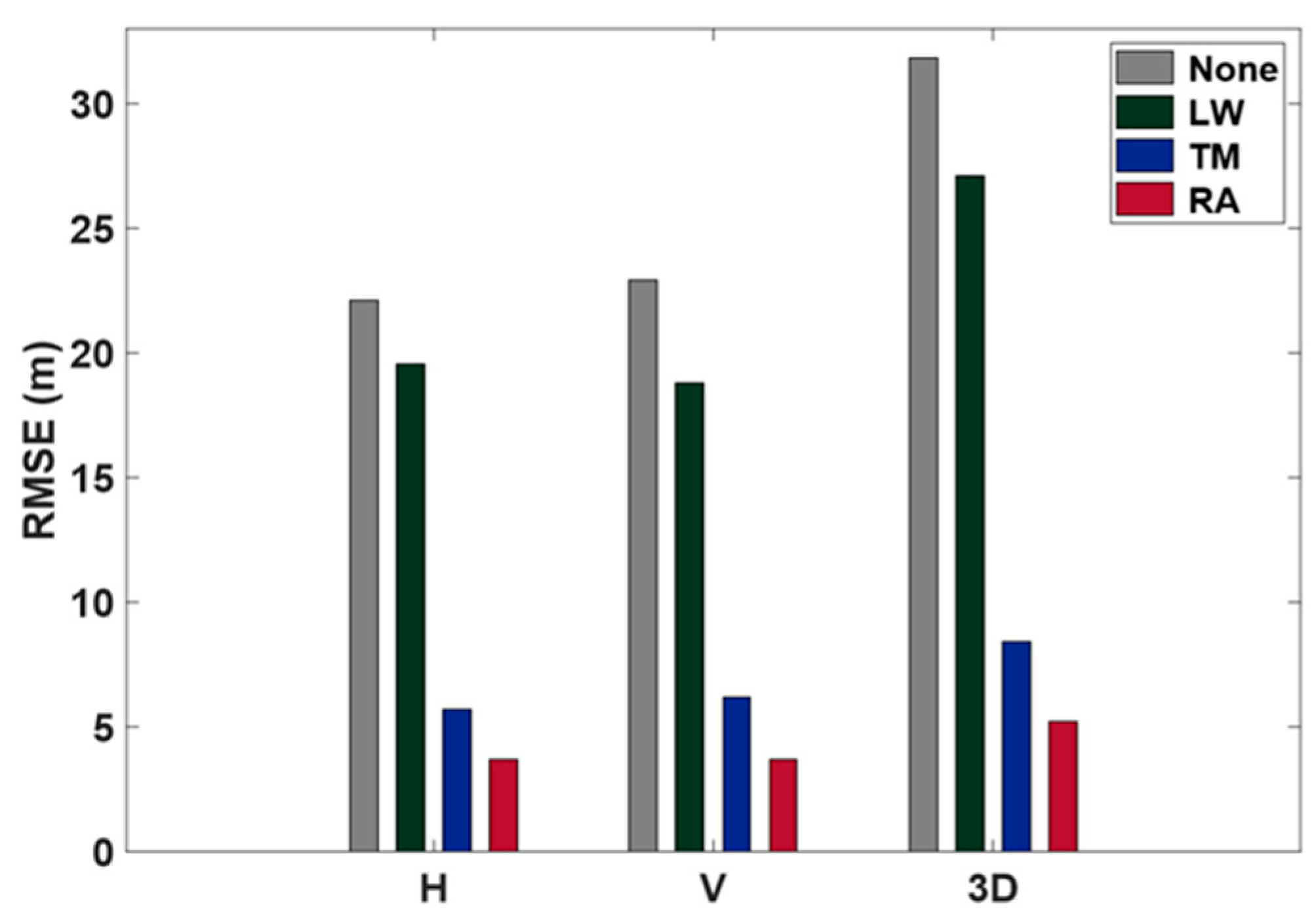
Figure 1 were obtained through RTK surveying and used as the reference for position accuracy computations. Root mean square error (RMSE) values for the entire hour are displayed in
Figure 6.
When no weight was applied, positioning accuracy in terms of the RMSE was 32.1 m horizontally and 37.0 m vertically. When using the linear model, accuracy improved by approximately 65% to 10.9 m horizontally and 10.5 m vertically compared to no weight applied. When the quadratic polynomial model was used, accuracy improved by approximately 70% to 9.1 m horizontally and 8.1 m vertically, surpassing the results from the linear model. Finally, with the exponential function, accuracy was 8.2 m horizontally and 7.9 m vertically, with improvement rates of 75% and 79%, respectively, compared to no weight applied. Therefore, we can conclude that the exponential function is the most effective choice from among the three models.








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}