



Responses of Vehicular Occupants During Emergency Braking and Aggressive Lane-Change Maneuvers

Abstract
1. Introduction
2. Materials and Methods
2.1. Volunteers
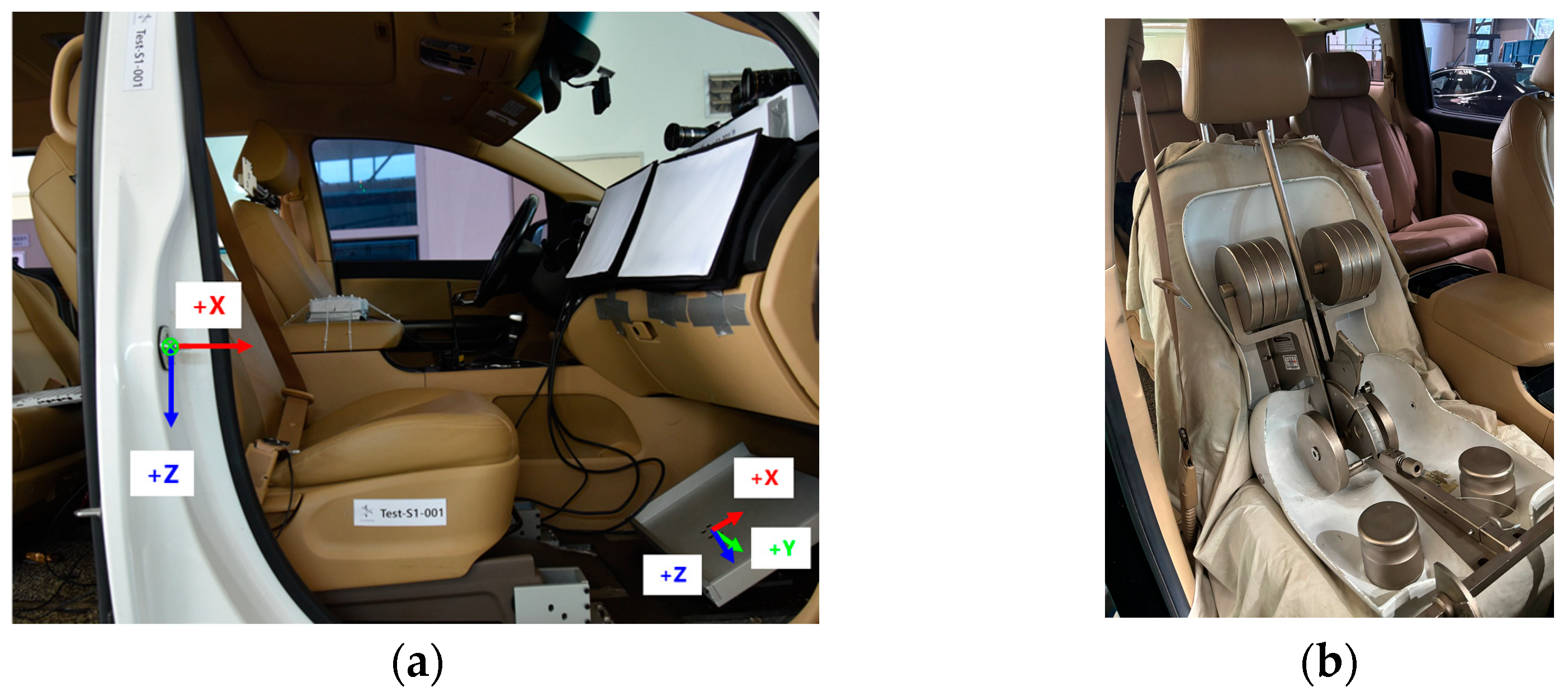
2.2. Test Vehicle Environment
2.3. Vehicle Maneuvers
2.4. Test Protocol
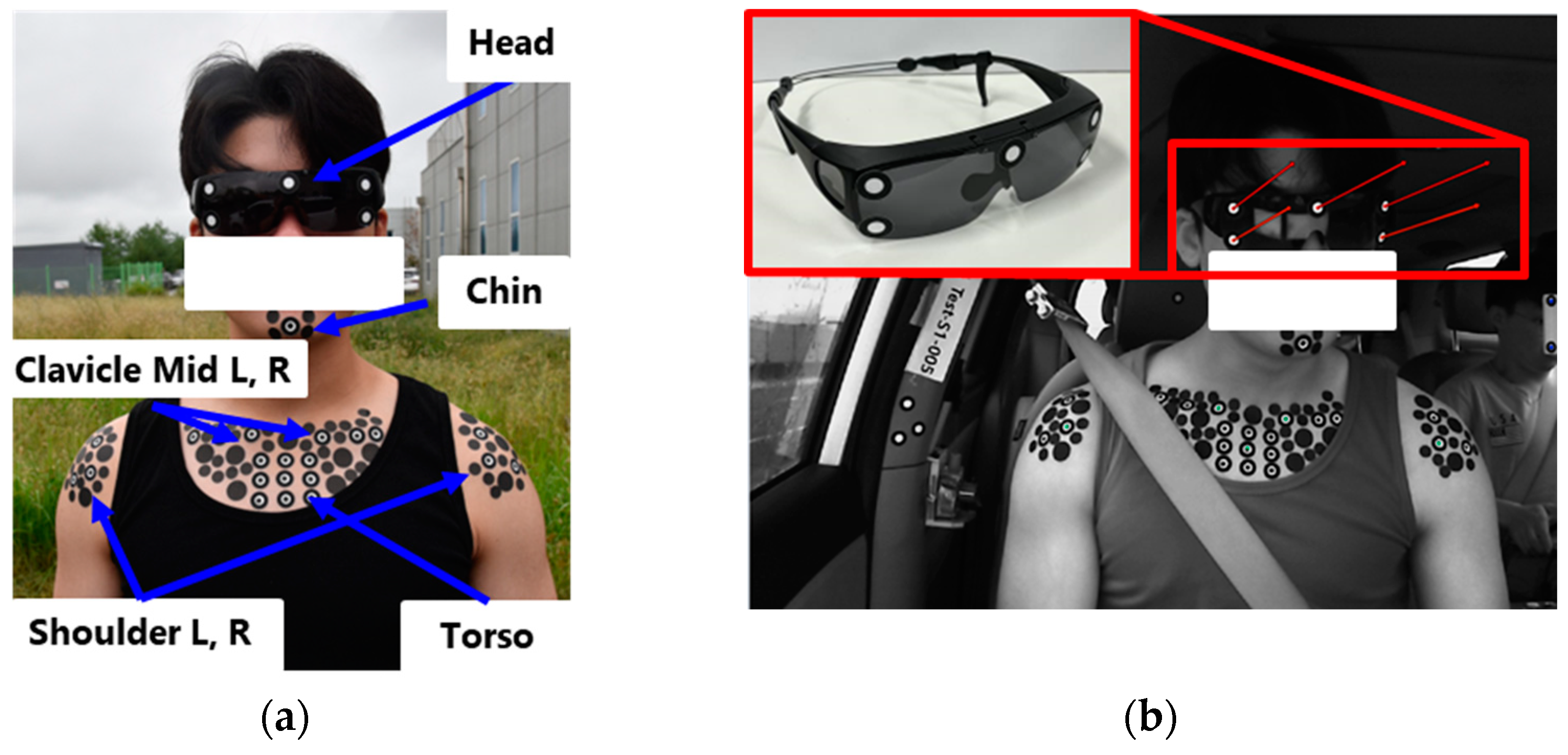
2.5. Instrumentation
2.6. Data Processing
2.6.1. Synchronization and Low-Pass Filtering
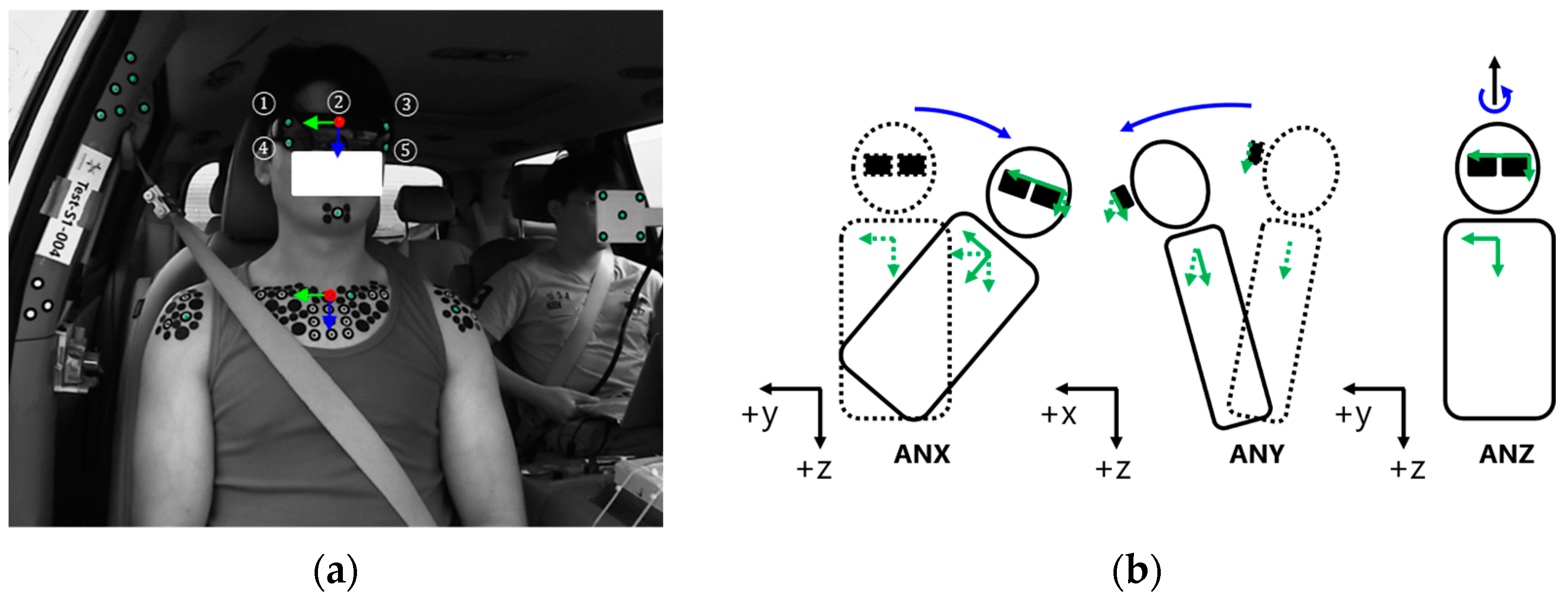
2.6.2. Definition of Coordinate Systems
2.6.3. Body Coordinate Systems
2.7. Sensitivity Analysis
3. Results
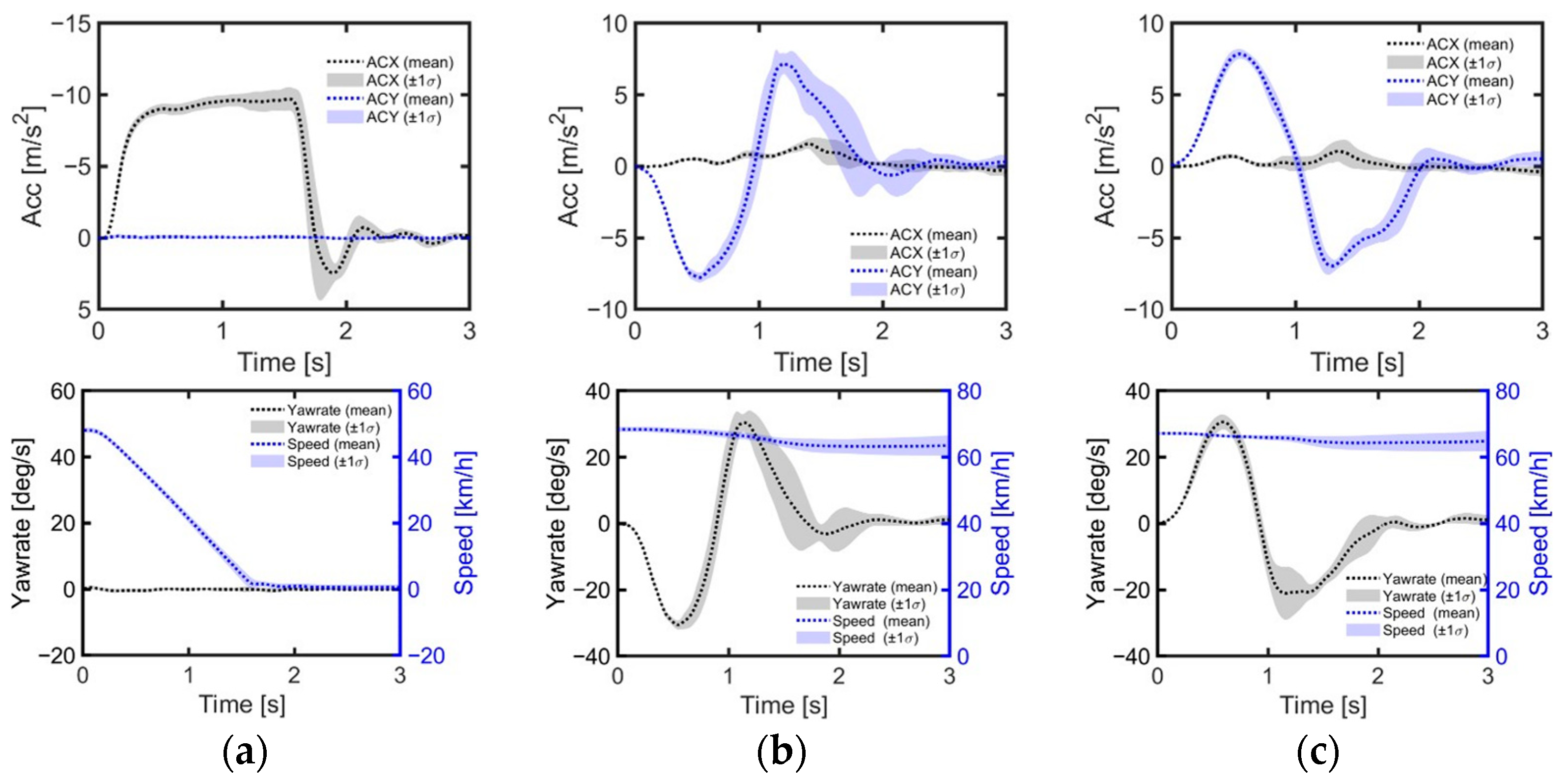
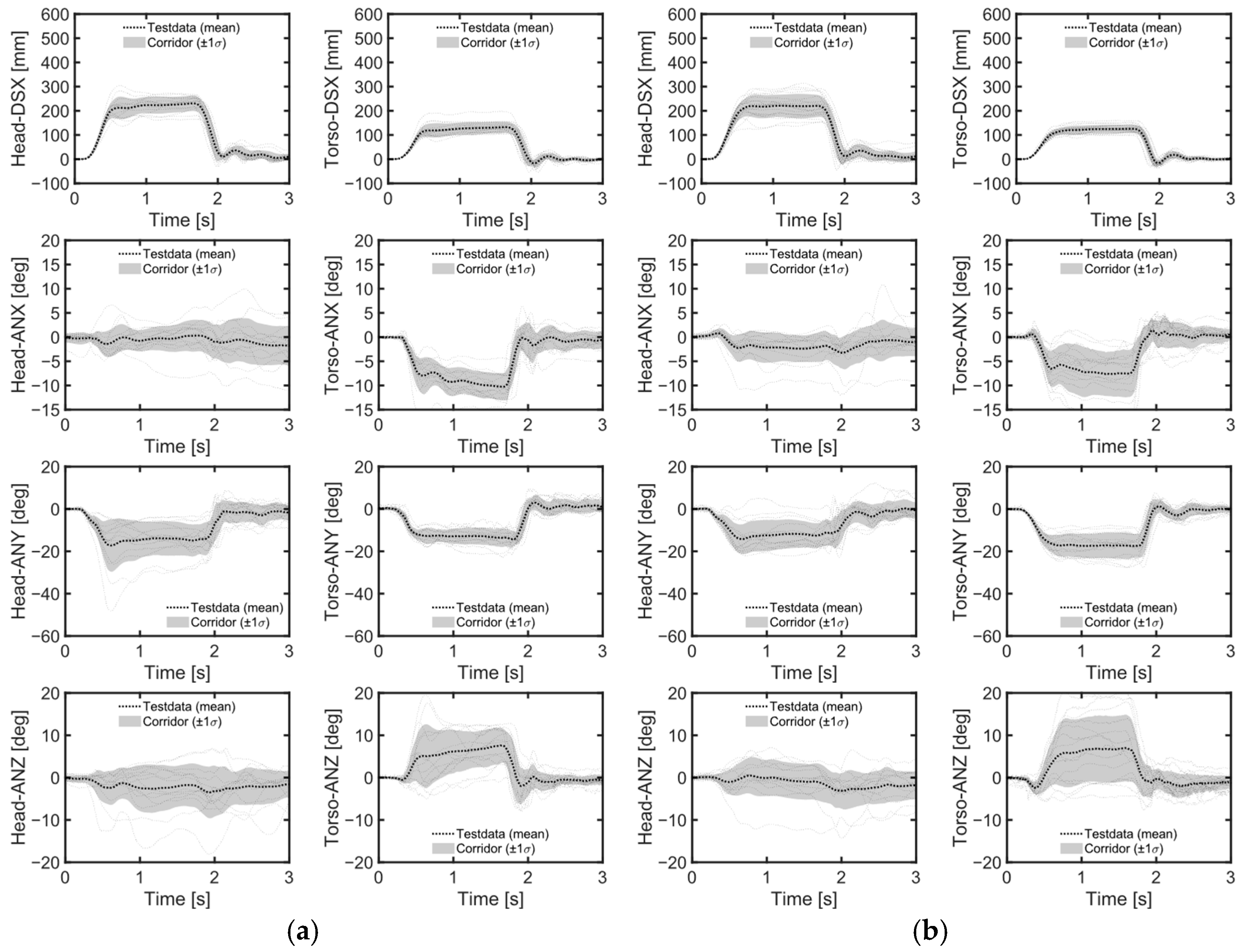
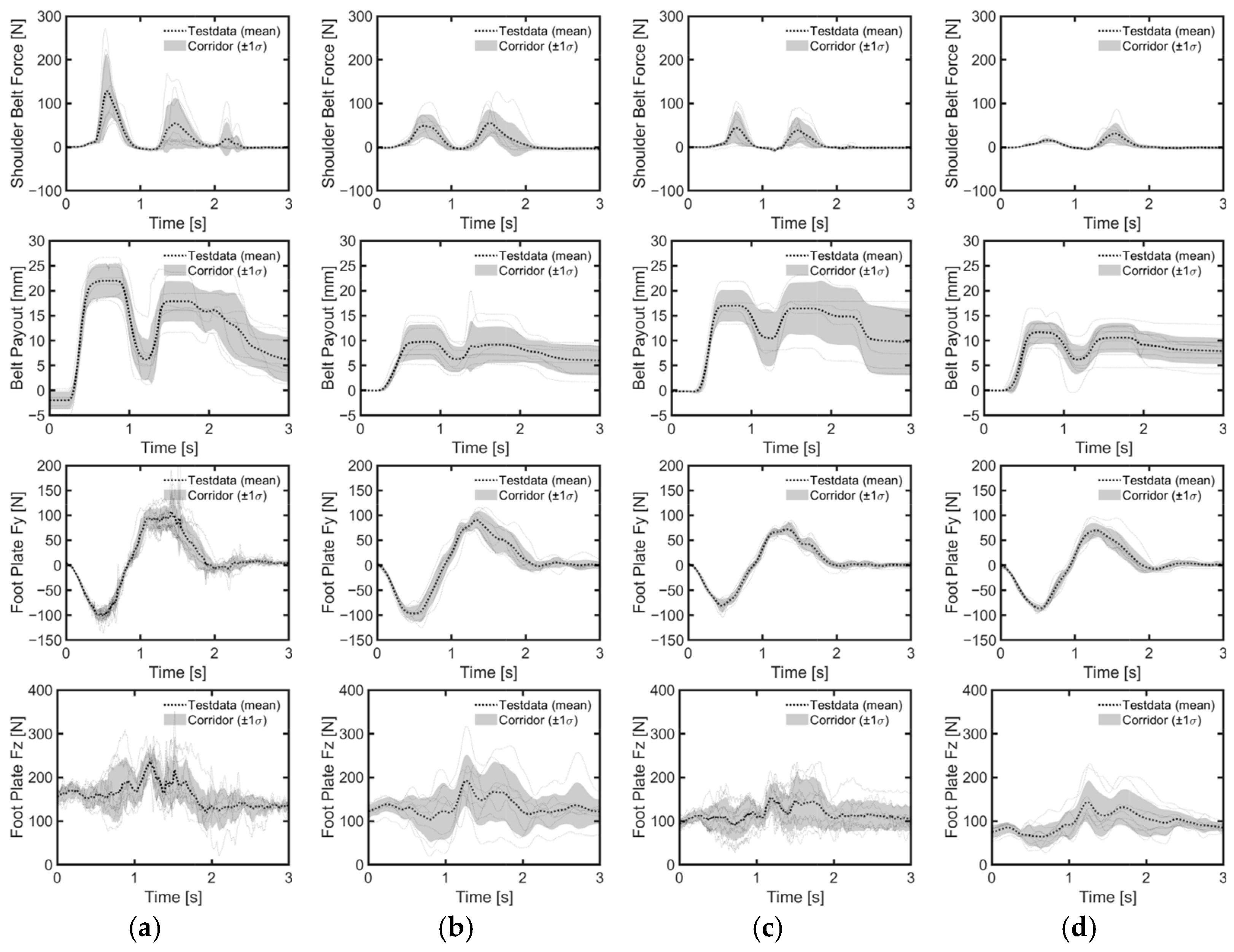
3.1. Emergency Braking Maneuver
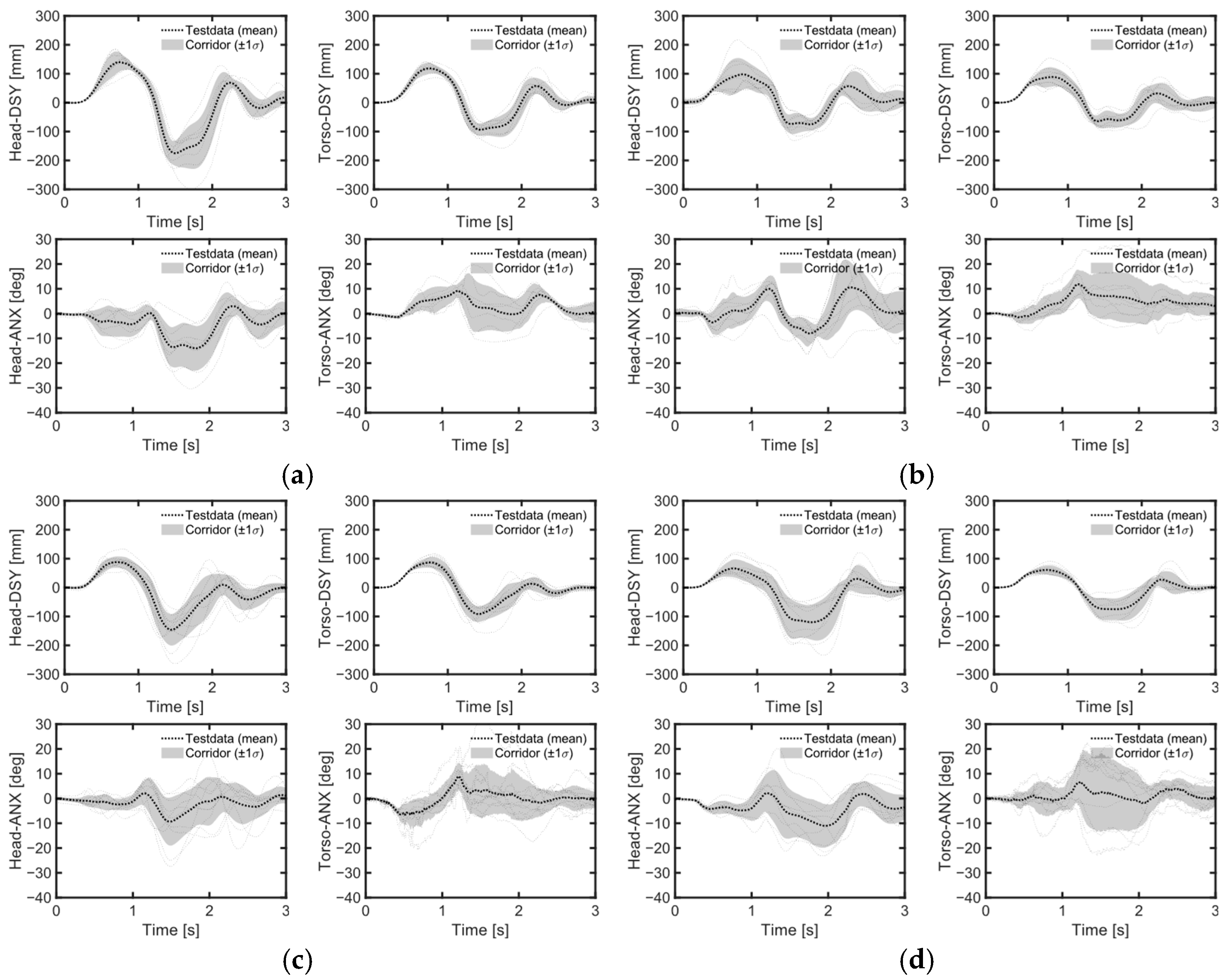
3.2. Aggressive Lane-Change Maneuvers
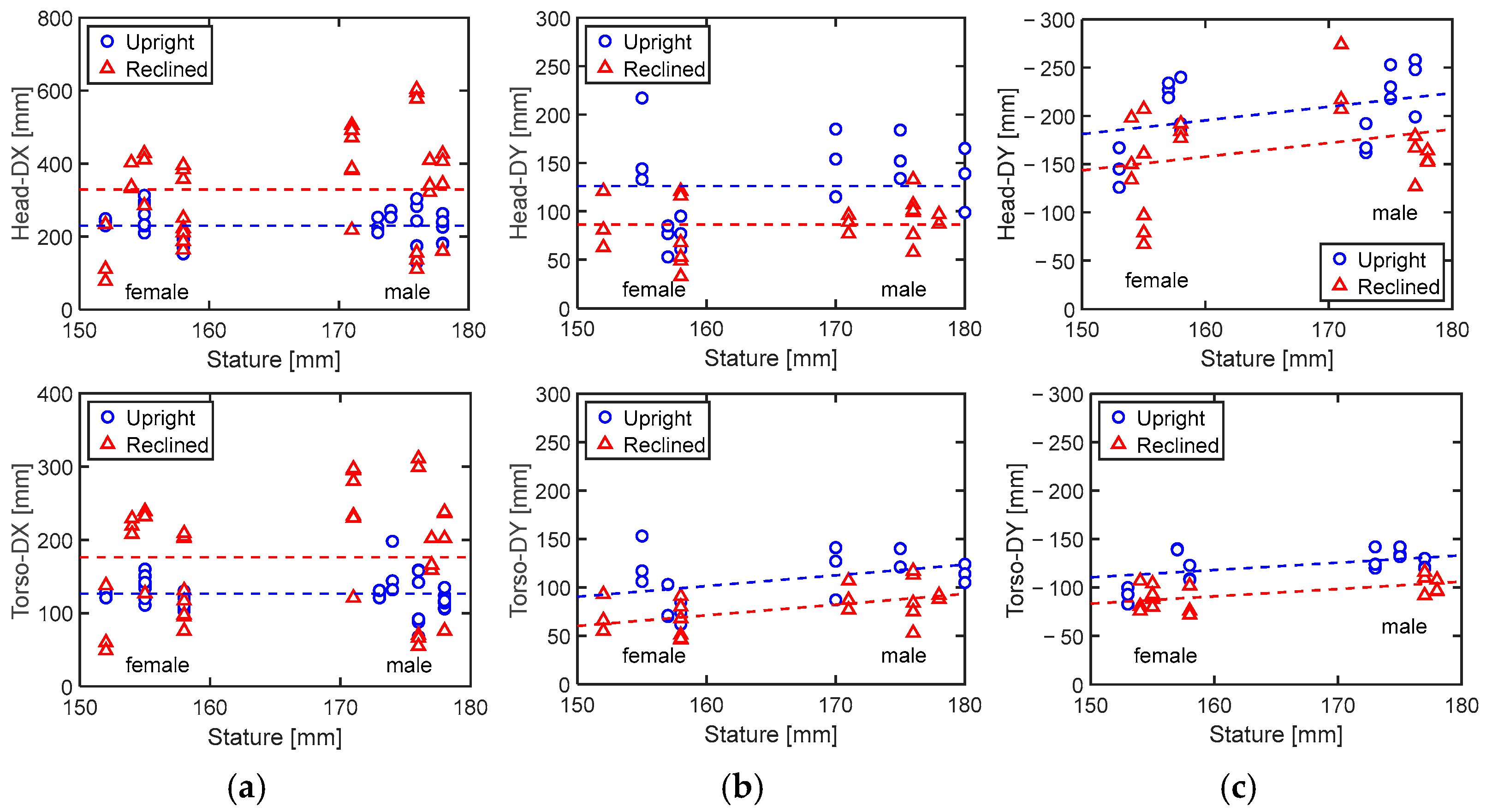
3.3. Sensitivity Analysis Results
4. Discussion
4.1. Method
4.2. Volunteer Excursions during Emergency Braking
4.3. Volunteer Excursions during Aggressive Lane Changes
4.4. Occupant Behavior
4.5. Limitation
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xiao, G.; Lee, J.; Jiang, Q.; Huang, H.; Abdel-Aty, M.; Wang, L. Safety improvements by intelligent connected vehicle technologies: A meta-analysis considering market penetration rates. Accid. Anal. Prev. 2021, 159, 106234. [Google Scholar] [CrossRef]
- McCarthy, R.L. Autonomous vehicle accident data analysis: California OL 316 reports: 2015–2020. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part B Mech. Eng. 2022, 8, 034502. [Google Scholar] [CrossRef]
- Xu, C.; Ding, Z.; Wang, C.; Li, Z. Statistical analysis of the patterns and characteristics of connected and autonomous vehicle involved crashes. J. Saf. Res. 2019, 71, 41–47. [Google Scholar] [CrossRef] [PubMed]
- Boggs, A.M.; Wali, B.; Khattak, A.J. Exploratory analysis of automated vehicle crashes in California: A text analytics and hierarchical Bayesian heterogeneity-based approach. Accid. Anal. Prev. 2020, 135, 105354. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Chitturi, M.V.; Noyce, D.A. Automated vehicle crash sequences: Patterns and potential uses in safety testing. Accid. Anal. Prev. 2021, 153, 106017. [Google Scholar] [CrossRef] [PubMed]
- Rieger, G.; Scheef, J.; Becker, H.; Stanzel, M.; Zobel, R. Active Safety Systems Change Accident Environment of Vehicles Significantly—A Challenge for Vehicle Design. In Proceedings of the International Technical Conference on Experimental Safety Vehicles, Washington, DC, USA, 6–9 June 2005; p. 11. [Google Scholar]
- Cicchino, J.B. Effectiveness of forward collision warning and autonomous emergency braking systems in reducing front-to-rear crash rates. Accid. Anal. Prev. 2017, 99, 142–152. [Google Scholar] [CrossRef] [PubMed]
- McMurry, T.L.; Poplin, G.S.; Shaw, G.; Panzer, M.B. Crash safety concerns for out-of-position occupant postures: A look toward safety in highly automated vehicles. Traffic Inj. Prev. 2018, 19, 582–587. [Google Scholar] [CrossRef] [PubMed]
- Gepner, B.; Rawska, K.; Richardson, R.; Kulkarni, S.; Chastain, K.; Zhu, J.; Forman, J.; Kerrigan, J. Challenges for occupant safety in highly automated vehicles across various anthropometries. In Proceedings of the 26th International Technical Conference on the Enhanced Safety of Vehicles (ESV), Eindhoven, The Netherlands, 10–13 June 2019; p. 13. [Google Scholar]
- Nie, B.; Gan, S.; Chen, W.; Zhou, Q. Seating preferences in highly automated vehicles and occupant safety awareness: A national survey of Chinese perceptions. Traffic Inj. Prev. 2020, 21, 247–253. [Google Scholar] [CrossRef] [PubMed]
- Caballero-Bruno, I.; Töpfer, D.; Wohllebe, T.; Hernández-Castellano, P.M. Assessing Car Seat Posture through Comfort and User Experience. J. Appl. Sci. 2022, 12, 3376. [Google Scholar] [CrossRef]
- Reed, M.P.; Ebert, S.M.; Jones, M.L.H.; Park, B.-K.D. Occupant Dynamics During Crash Avoidance Maneuvers; University of Michigan Transportation Research Institute: Ann Arbor, MI, USA, 2021. [Google Scholar]
- Xu, T.; Sheng, X.; Zhang, T.; Liu, H.; Liang, X.; Ding, A. November. Development and Validation of Dummies and Human Models Used in Crash Test. Appl. Bionics Biomech. 2018, 2018, 1–12. [Google Scholar]
- Teru, I.; Toshihiro, I. The Effect of Occupant Protection by Controlling Airbag and Seatbelt; National Highway Traffic Safety Administration: Washington, DC, USA, 2003; p. 10. [Google Scholar]
- Lee, E.L.; Parent, D.P.; Craig, M.J.; McFadden, J.; Moorhouse, K. Biomechanical Response Requirements Manual: THOR 5th Percentile Female NHTSA Advanced Frontal Dummy; (DOT HS 812 370); National Highway Traffic Safety Administration: Washington, DC, USA, 2017. [Google Scholar]
- Carlsson, S.; Davidsson, J. Volunteer occupant kinematics during driver initiated and autonomous braking when driving in real traffic environments. In Proceedings of the 11th International Research Council on Biomechanics of Injury Conference, Krakow, Poland, 14–16 September 2011. (Report No. IRC-11-43). [Google Scholar]
- Ólafsdóttir, J.M.; Östh, J.K.; Davidsson, J.; Brolin, K.B. Passenger kinematics and muscle responses in autonomous braking events with upright and reversible pretensioned restraints. In Proceedings of the 13th International Research Council on Biomechanics of Injury Conference, Gothenburg, Sweden, 11–13 September 2013. (Report No. IRC-13-70). [Google Scholar]
- Kirschbichler, S.; Huber, P.; Prüggler, A.; Steidl, T.; Sinz, W.; Mayer, C.; D‘Addetta, G.A. Factors influencing occupant kinematics during braking and lane change maneuvers in a passenger vehicle. In Proceedings of the 14th International Research Council on Biomechanics of Injury Conference, Berlin, Germany, 10–12 September 2014. (Report No. IRC-14-70). [Google Scholar]
- Ghaffari, G.; Brolin, K.; Bråse, D.; Pipkorn, B.; Svanberg, B.; Jakobsson, L.; Davidsson, J. Passenger kinematics in Lane change and Lane change with Braking Manoeuvres using two belt configurations: Upright and reversible pre-pretensioner. In Proceedings of the 2018 IRCOBI Conference, Athens, Greece, 12–14 September 2018; pp. 12–14. [Google Scholar]
- Ghaffari, G.; Davidsson, J. Female kinematics and muscle responses in lane change and lane change with braking maneuvers. Traffic Inj. Prev. 2021, 22, 236–241. [Google Scholar] [CrossRef] [PubMed]
- Kirshbichler, S.; Klein, C.; Breitfuss, D.; Steidl, T.; Pucher, J.; Aleksandra, K.; Lucas, I. Passenger Kinematics in Reclined Sitting Position in Braking and Steering Manoeuvres. In Proceedings of the 23th International Research Council on Biomechanics of Injury Conference, Cambridge, UK, 13–15 September 2023. (Report No. IRC-23-96). [Google Scholar]
- Society of Automotive Engineers. Instrumentation for Impact Test—Part 1—Electronic Instrumentation; SAE: Warrendale, PA, USA, 2007. [Google Scholar]
- Larsson, E.; Iraeus, J.; Fice, J.; Pipkorn, B.; Jakobsson, L.; Brynskog, E.; Brolin, K.; Davidsson, J. Active human body model predictions compared to volunteer response in experiments with braking, lane change, and combined manoeuvres. In Proceedings of the International Research Council on the Biomechanics of Injury IRCOBI, Florence, Italy, 11–13 September 2019; pp. 349–369. [Google Scholar]
- Bayarri, S.; Fernandez, M.; Perez, M. Virtual reality for driving simulation. Commun. ACM 1996, 39, 72–76. [Google Scholar] [CrossRef]
- Liu, M.; Liu, Y.; Feleke, A.G.; Fei, W.; Bi, L. Neural Signature and Decoding of Unmanned Aerial Vehicle Operators in Emergency Scenarios Using Electroencephalography. Sensors 2024, 24, 6304. [Google Scholar] [CrossRef] [PubMed]
- Araluce, J.; Bergasa, L.M.; Ocaña, M.; López-Guillén, E.; Revenga, P.A.; Arango, J.F.; Pérez, O. Gaze focalization system for driving applications using openface 2.0 toolkit with NARMAX algorithm in accidental scenarios. Sensors 2021, 21, 6262. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maneuver | Volunteer | Seatback Angle | Measurement | Limitation | |
|---|---|---|---|---|---|
| [16] | Braking | 5%tile female, 50%tile female, 50%tlie male | Upright (-) | Head kinematics Torso kinematics | No reclined posture No lane changes |
| [17] | Braking | 50%tile female 50%tile male | 22 deg | Head kinematics Torso kinematics Seatbelt load Footplate load Muscle activity | No reclined posture No small female No lane changes |
| [18] | Braking | 50%tile female 50%tile male | 14 deg | Head kinematics Torso kinematics Seatbelt load | No reclined posture No small female |
| Lane change | |||||
| [19] | Lane change | 50%tile female 50%tile male | 25 deg | Head kinematics Torso kinematics Seatbelt load Footplate load Muscle activity | No reclined posture No small female |
| [12] | Braking | 5%tile~95%tile people | 23 deg, 35 deg, 47 deg | Head kinematics | Head kinematics only |
| Lane change | |||||
| Turn and brake | |||||
| [21] | Braking | 50%tile female 50%tile male | 24 deg, 48 deg | Head kinematics Torso kinematics Muscle activity | Focused on midsize female No excursion data |
| Turn |
| Female | Male | H3-AM50 | H3-AF5 | |
|---|---|---|---|---|
| No. of volunteers | 14 | 13 | - | - |
| Age [year] | 32 (±10) | 27 (±8) | - | - |
| Stature [cm] | 155 (±3) | 176 (±3) | 175 | 152 |
| Mass [kg] | 51 (±5) | 76 (±4) | 78 | 49 |
| Maneuver | Seatback Angle [deg] | Awareness of Initiation of Maneuver | Number of Volunteers (Male/Female) | Number of Repetitions |
|---|---|---|---|---|
| Braking | 23 | Not informed | 12 (6/6) | 3 |
| 43 | Not informed | 13 (7/6) | 3 | |
| Left lane change | 23 | Not informed | 6 (3/3) | 3 |
| 43 | Not informed | 7 (4/3) | 3 | |
| Right lane change | 23 | Not informed | 6 (3/3) | 3 |
| 43 | Not informed | 7 (3/4) | 3 |
| Gender | Seatback Angle [deg] | N | Head | Torso | Shoulder Belt Force [N] | Lap Belt Force [N] | Foot Plate Fz [N] | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| DSX [mm] | ANY [deg] | ANZ [deg] | DSX [mm] | ANY [deg] | ANZ [deg] | ||||||
| Male | 23 | 17 | 227 ± 46 | −21 ± 11 | −6 ± 5 | 126 ± 30 | −17 ± 3 | 9 ± 5 | 282 ± 70 | 133 ± 18 | −372 ± 74 |
| 43 | 18 | 371 ± 156 | −31 ± 11 | −8 ± 4 | 196 ± 88 | −20 ± 12 | −5 ± 3 | 300 ± 222 | 174 ± 92 | −372 ± 121 | |
| Female | 23 | 18 | 233 ± 45 | −18 ± 3 | −5 ± 4 | 127 ± 16 | −20 ± 6 | 9 ± 7 | 206 ± 57 | 116 ± 28 | −251 ± 74 |
| 43 | 16 | 282 ± 110 | −22 ± 8 | −10 ± 7 | 149 ± 64 | −26 ± 11 | −6 ± 4 | 118 ± 84 | 95 ± 24 | −257 ± 52 | |
| Maneuver | Gender | Seatback Angle [deg] | N | Head | Torso | Shoulder Belt Force [N] | Foot Plate Fy [N] | Foot Plate Fz [N] | ||
|---|---|---|---|---|---|---|---|---|---|---|
| DSY [mm] | ANX [deg] | DSY [mm] | ANX [deg] | |||||||
| Left Lane Change | Male | 23 | 9 | 133 ± 57 | 6 ± 4 | 122 ± 18 | 13 ± 5 | 106 ± 50 | 118 ± 11 | −249 ± 63 |
| 43 | 11 | 93 ± 19 | 8 ± 4 | 88 ± 19 | 12 ± 9 | 63 ± 48 | 111 ± 15 | −241 ± 75 | ||
| Female | 23 | 9 | 105 ± 52 | 17 ± 6 | 94 ± 29 | 14 ± 6 | 37 ± 18 | 87 ± 8 | −180 ± 93 | |
| 43 | 9 | 78 ± 34 | 8 ± 5 | 66 ± 18 | 12 ± 7 | 35 ± 19 | 88 ± 9 | −160 ± 41 | ||
| Right Lane Change | Male | 23 | 8 | −208 ± 35 | −18 ± 4 | −131 ± 9 | −12 ± 3 | 136 ± 72 | −103 ± 12 | −251 ± 35 |
| 43 | 8 | −186 ± 46 | −26 ± 7 | −105 ± 10 | −14 ± 7 | 86 ± 36 | −110 ± 12 | −199 ± 27 | ||
| Female | 23 | 8 | −193 ± 41 | −22 ± 9 | −115 ± 22 | −15 ± 7 | 54 ± 33 | −83 ± 13 | −176 ± 46 | |
| 43 | 9 | −155 ± 51 | −17 ± 7 | −88 ± 12 | −18 ± 9 | 35 ± 23 | −88 ± 7 | −150 ± 47 | ||
| Maneuver | Responses [mm] | Variables | Adjusted R2 | ||
|---|---|---|---|---|---|
| Intercept | Seatback [deg] | Stature [cm] | |||
| Braking | Head-DX | 115.8 | 4.96 | − | 17.30% |
| Torso-DX | 69.2 | 2.491 | − | 14.51% | |
| Left lane change | Head-DY | 171.8 | −1.990 | − | 20.85% |
| Torso-DY | −40.2 | −1.510 | 1.102 | 38.91% | |
| Right lane change | Head-DY | −12 | 1.878 | −1.416 | 21.42% |
| Torso-DY | −28.5 | 1.357 | −0.755 | 58.11% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, H.; Kim, T. Responses of Vehicular Occupants During Emergency Braking and Aggressive Lane-Change Maneuvers. Sensors 2024, 24, 6727. https://doi.org/10.3390/s24206727
Hwang H, Kim T. Responses of Vehicular Occupants During Emergency Braking and Aggressive Lane-Change Maneuvers. Sensors. 2024; 24(20):6727. https://doi.org/10.3390/s24206727
Chicago/Turabian StyleHwang, Hyeonho, and Taewung Kim. 2024. "Responses of Vehicular Occupants During Emergency Braking and Aggressive Lane-Change Maneuvers" Sensors 24, no. 20: 6727. https://doi.org/10.3390/s24206727
APA StyleHwang, H., & Kim, T. (2024). Responses of Vehicular Occupants During Emergency Braking and Aggressive Lane-Change Maneuvers. Sensors, 24(20), 6727. https://doi.org/10.3390/s24206727