


Tensor Based Semi-Blind Channel Estimation for Reconfigurable Intelligent Surface-Aided Multiple-Input Multiple-Output Communication Systems

 , ,
, ,
Abstract
1. Introduction
- We leverage the superiority in lowering the pilot overhead of the semi-blind CE method. In contrast to conventional pilot-assisted methods, our receiver involves symbol matrix estimation which could lighten the reliance on pilot training.
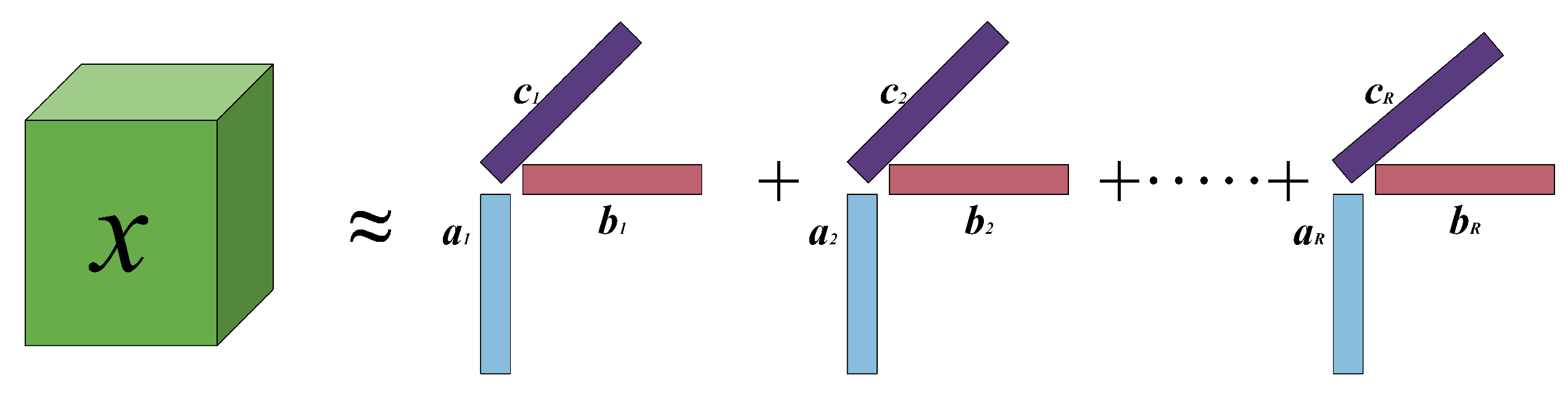
- We prove that the signal received at the BS adheres to a double parallel factor (PARAFAC) tensor model. The dimension of the received signals can be reduced by leveraging tensor decomposition, resulting in accelerating the estimation speed.
- We propose a novel ALS-based semi-blind receiver for the RIS-aided MIMO communication system. Based on the unfolded forms generated by tensor decomposition, we formulate the joint CE and symbol estimation problem into LS problems and then solve them by ALS.
2. Preliminaries on the Parallel Factor Tensor Decomposition
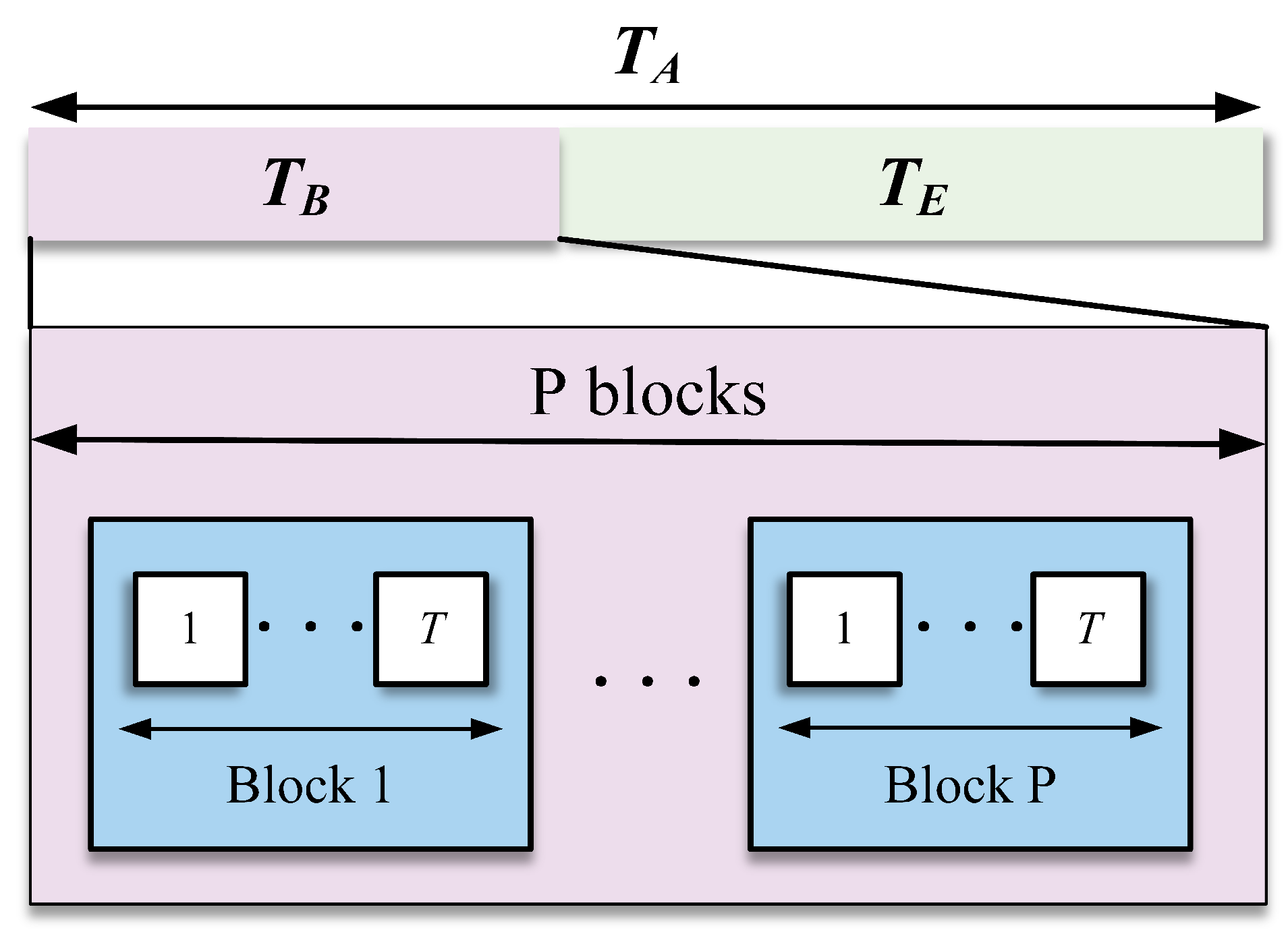
3. System Model
4. Proposed Semi-Blind Receiver
4.1. Symbol Estimation Stage
4.2. Channel Estimation Stage
| Algorithm 1: Proposed double-PARAFAC-based Alternating Least Squares. |
| Input: Initialize . 1: Symbol Estimation Stage 1.1: ; 1.2: While do 1.3: ; 1.4: Calculate by (16); 1.5: Calculate by (17); 1.6: End While 2: Channel Estimation Stage 2.1: ; Reconstruct receive signals by (18); 2.2: While do 2.3: ; 2.4: Calculate by (25); 2.5: Calculate by (26); 2.6: End While . |
4.3. Computational Complexity
4.4. Feasibility Analysis
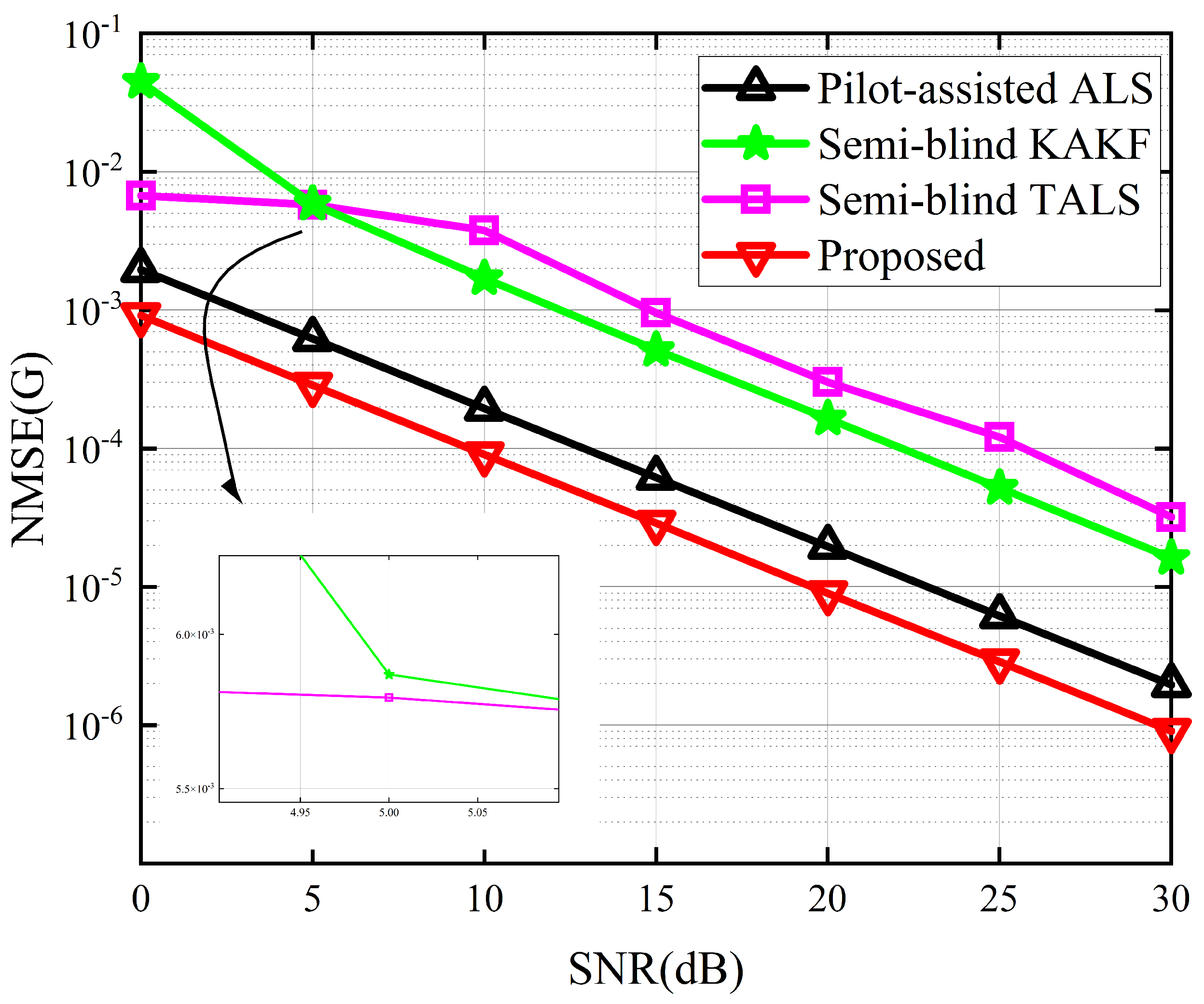
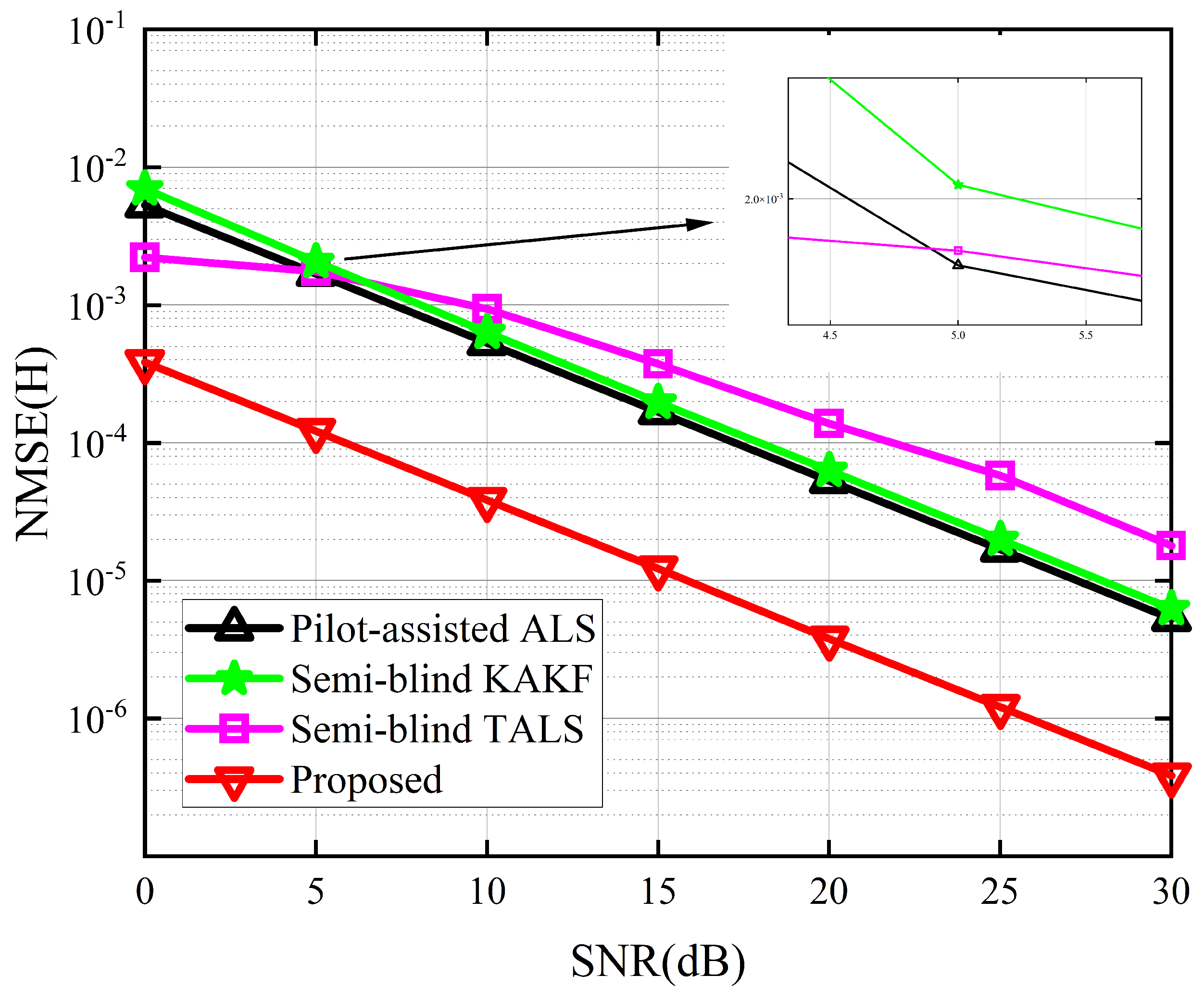
5. Simulations and Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, W.; Lin, X.; Lee, J.; Toskala, A.; Sun, S.; Chiasserini, C.F.; Liu, L. 5G-Advanced Toward 6G: Past, Present, and Future. IEEE J. Sel. Areas Commun. 2023, 41, 1592–1619. [Google Scholar] [CrossRef]
- Schwarz, S.; Pratschner, S. Multiple Antenna Systems in Mobile 6G: Directional Channels and Robust Signal Processing. IEEE Commun. Mag. 2023, 61, 64–70. [Google Scholar] [CrossRef]
- Jian, M.; Alexandropoulos, G.C.; Basar, E.; Huang, C.; Liu, R.; Liu, Y.; Yuen, C. Reconfigurable intelligent surfaces for wireless communications: Overview of hardware designs, channel models, and estimation techniques. Intell. Converg. Netw. 2022, 3, 1–32. [Google Scholar] [CrossRef]
- Zheng, B.; You, C.; Mei, W.; Zhang, R. A Survey on Channel Estimation and Practical Passive Beamforming Design for Intelligent Reflecting Surface Aided Wireless Communications. IEEE Commun. Surv. Tutor. 2022, 24, 1035–1071. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Communications: A Tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Naeem, F.; Ali, M.; Kaddoum, G.; Huang, C.; Yuen, C. Security and Privacy for Reconfigurable Intelligent Surface in 6G: A Review of Prospective Applications and Challenges. IEEE Open J. Commun. Soc. 2023, 4, 1196–1217. [Google Scholar] [CrossRef]
- Zhang, Z.; Dai, L.; Chen, X.; Liu, C.; Yang, F.; Schober, R.; Poor, H.V. Active RIS vs. Passive RIS: Which Will Prevail in 6G? IEEE Trans. Commun. 2023, 71, 1707–1725. [Google Scholar] [CrossRef]
- Pan, C.; Zhou, G.; Zhi, K.; Hong, S.; Wu, T.; Pan, Y.; Ren, H.; Renzo, M.D.; Lee Swindlehurst, A.; Zhang, R.; et al. An Overview of Signal Processing Techniques for RIS/IRS-Aided Wireless Systems. IEEE J. Sel. Top. Signal Process. 2022, 16, 883–917. [Google Scholar] [CrossRef]
- Li, H.; Zhiwen, P.; Bin, W.; Nan, L.; Xiaohu, Y. Channel Estimation for Reconfigurable-Intelligent-Surface-Aided Multiuser Communication Systems Exploiting Statistical CSI of Correlated RIS–User Channels. IEEE Internet Things J. 2024, 11, 8871–8881. [Google Scholar] [CrossRef]
- Gomes, P.R.B.; de Araújo, G.T.; Sokal, B.; Almeida, A.L.F.d.; Makki, B.; Fodor, G. Channel Estimation in RIS-Assisted MIMO Systems Operating Under Imperfections. IEEE Trans. Veh. Technol. 2023, 72, 14200–14213. [Google Scholar] [CrossRef]
- Zhang, X.; Shao, X.; Guo, Y.; Lu, Y.; Cheng, L. Sparsity-Structured Tensor-Aided Channel Estimation for RIS-Assisted MIMO Communications. IEEE Commun. Lett. 2022, 26, 2460–2464. [Google Scholar] [CrossRef]
- Sun, S.; Yan, H. Channel Estimation for Reconfigurable Intelligent Surface-Assisted Wireless Communications Considering Doppler Effect. IEEE Wirel. Commun. Lett. 2021, 10, 790–794. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C.; Zhang, Z.; Debbah, M. Channel Estimation for RIS-Empowered Multi-User MISO Wireless Communications. IEEE Trans. Commun. 2021, 69, 4144–4157. [Google Scholar] [CrossRef]
- Mirza, J.; Ali, B. Channel Estimation Method and Phase Shift Design for Reconfigurable Intelligent Surface Assisted MIMO Networks. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 441–451. [Google Scholar] [CrossRef]
- He, J.; Wymeersch, H.; Juntti, M. Channel Estimation for RIS-Aided mmWave MIMO Systems via Atomic Norm Minimization. IEEE Trans. Wirel. Commun. 2021, 20, 5786–5797. [Google Scholar] [CrossRef]
- Liu, S.; Gao, Z.; Zhang, J.; Renzo, M.D.; Alouini, M.S. Deep Denoising Neural Network Assisted Compressive Channel Estimation for mmWave Intelligent Reflecting Surfaces. IEEE Trans. Veh. Technol. 2020, 69, 9223–9228. [Google Scholar] [CrossRef]
- Xu, M.; Zhang, S.; Ma, J.; Dobre, O.A. Deep Learning-Based Time-Varying Channel Estimation for RIS Assisted Communication. IEEE Commun. Lett. 2022, 26, 94–98. [Google Scholar] [CrossRef]
- Seo, J.; Choi, G.; Kim, S.C. DBPN-Based Uplink Channel Estimation for Multi-User MISO RIS System. IEEE Wirel. Commun. Lett. 2023, 12, 2143–2147. [Google Scholar] [CrossRef]
- Kundu, N.K.; McKay, M.R. Channel Estimation for Reconfigurable Intelligent Surface Aided MISO Communications: From LMMSE to Deep Learning Solutions. IEEE Open J. Commun. Soc. 2021, 2, 471–487. [Google Scholar] [CrossRef]
- Al-Shoukairi, M.; Rao, B.D. Semi-Blind Channel Estimation in MIMO Systems With Discrete Priors on Data Symbols. IEEE Signal Process. Lett. 2022, 29, 51–54. [Google Scholar] [CrossRef]
- Hajji, Z.; Aïssa-El-Bey, A.; Amis, K. Joint Semi-Blind Channel Estimation and Finite Alphabet Signal Recovery Detection for Large-Scale MIMO Systems. IEEE Open J. Signal Process. 2021, 2, 370–382. [Google Scholar] [CrossRef]
- Huang, C.; Xu, J.; Zhang, W.; Xu, W.; Ng, D.W.K. Semi-Blind Channel Estimation for RIS-Assisted MISO Systems Using Expectation Maximization. IEEE Trans. Veh. Technol. 2022, 71, 10173–10178. [Google Scholar] [CrossRef]
- Liu, B.; Gong, C.; Cheng, J.; Xu, Z.; Liu, J. Blind and Semi-Blind Channel Estimation/Equalization for Poisson Channels in Optical Wireless Scattering Communication Systems. IEEE Trans. Wirel. Commun. 2022, 21, 5930–5946. [Google Scholar] [CrossRef]
- de Araújo, G.T.; Gomes, P.R.B.; de Almeida, A.L.F.; Fodor, G.; Makki, B. Semi-Blind Joint Channel and Symbol Estimation in IRS-Assisted Multiuser MIMO Networks. IEEE Wirel. Commun. Lett. 2022, 11, 1553–1557. [Google Scholar] [CrossRef]
- Du, J.; Luo, X.; Li, X.; Zhu, M.; Rabie, K.M.; Kara, F. Semi-Blind Joint Channel Estimation and Symbol Detection for RIS-Empowered Multiuser mmWave Systems. IEEE Commun. Lett. 2023, 27, 362–366. [Google Scholar] [CrossRef]
- de Araújo, G.T.; de Almeida, A.L.F.; Boyer, R.; Fodor, G. Semi-Blind Joint Channel and Symbol Estimation for IRS-Assisted MIMO Systems. IEEE Trans. Signal Process. 2023, 71, 1184–1199. [Google Scholar] [CrossRef]
- Phan, A.H.; Tichavský, P.; Cichocki, A. CANDECOMP/PARAFAC Decomposition of High-Order Tensors Through Tensor Reshaping. IEEE Trans. Signal Process. 2013, 61, 4847–4860. [Google Scholar] [CrossRef]
- Sidiropoulos, N.D.; De Lathauwer, L.; Fu, X.; Huang, K.; Papalexakis, E.E.; Faloutsos, C. Tensor Decomposition for Signal Processing and Machine Learning. IEEE Trans. Signal Process. 2017, 65, 3551–3582. [Google Scholar] [CrossRef]
- Phan, A.H.; Tichavský, P.; Cichocki, A. Fast Alternating LS Algorithms for High Order CANDECOMP/PARAFAC Tensor Factorizations. IEEE Trans. Signal Process. 2013, 61, 4834–4846. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Meaning |
|---|---|
| M | The number of BS antennas |
| L | The number of UT antennas |
| N | The number of reflecting elements |
| P | The number of time blocks |
| T | The number of time slots |
| K | Code length |
| BS-RIS channel | |
| RIS-UT channel | |
| Transmitted symbol matrix | |
| RIS’s phase shift matrix | |
| Encoding matrix | |
| Additive white Gaussian noise matrix |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, N.; Deng, H.; Xu, F.; Zheng, Y.; Qu, M.; Fu, W.; Zhou, N. Tensor Based Semi-Blind Channel Estimation for Reconfigurable Intelligent Surface-Aided Multiple-Input Multiple-Output Communication Systems. Sensors 2024, 24, 6625. https://doi.org/10.3390/s24206625
Li N, Deng H, Xu F, Zheng Y, Qu M, Fu W, Zhou N. Tensor Based Semi-Blind Channel Estimation for Reconfigurable Intelligent Surface-Aided Multiple-Input Multiple-Output Communication Systems. Sensors. 2024; 24(20):6625. https://doi.org/10.3390/s24206625
Chicago/Turabian StyleLi, Ni, Honggui Deng, Fuxin Xu, Yitao Zheng, Mingkang Qu, Wanqing Fu, and Nanqing Zhou. 2024. "Tensor Based Semi-Blind Channel Estimation for Reconfigurable Intelligent Surface-Aided Multiple-Input Multiple-Output Communication Systems" Sensors 24, no. 20: 6625. https://doi.org/10.3390/s24206625
APA StyleLi, N., Deng, H., Xu, F., Zheng, Y., Qu, M., Fu, W., & Zhou, N. (2024). Tensor Based Semi-Blind Channel Estimation for Reconfigurable Intelligent Surface-Aided Multiple-Input Multiple-Output Communication Systems. Sensors, 24(20), 6625. https://doi.org/10.3390/s24206625