

Research on Underwater Constant High-Voltage DC Switching Technology for MCSEM


Abstract
1. Introduction
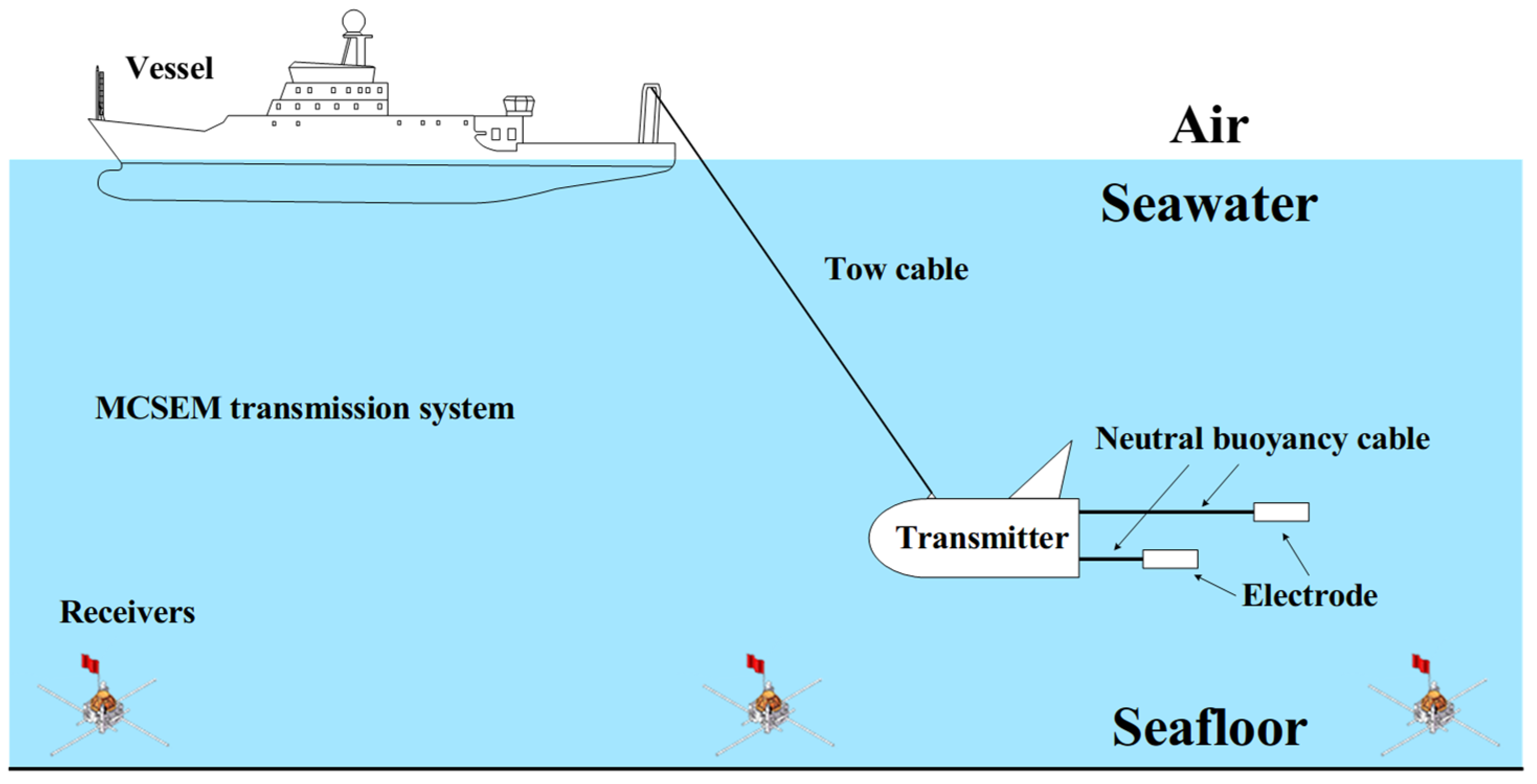
2. Analysis of Three-Phase AC MCSEM Transmission System
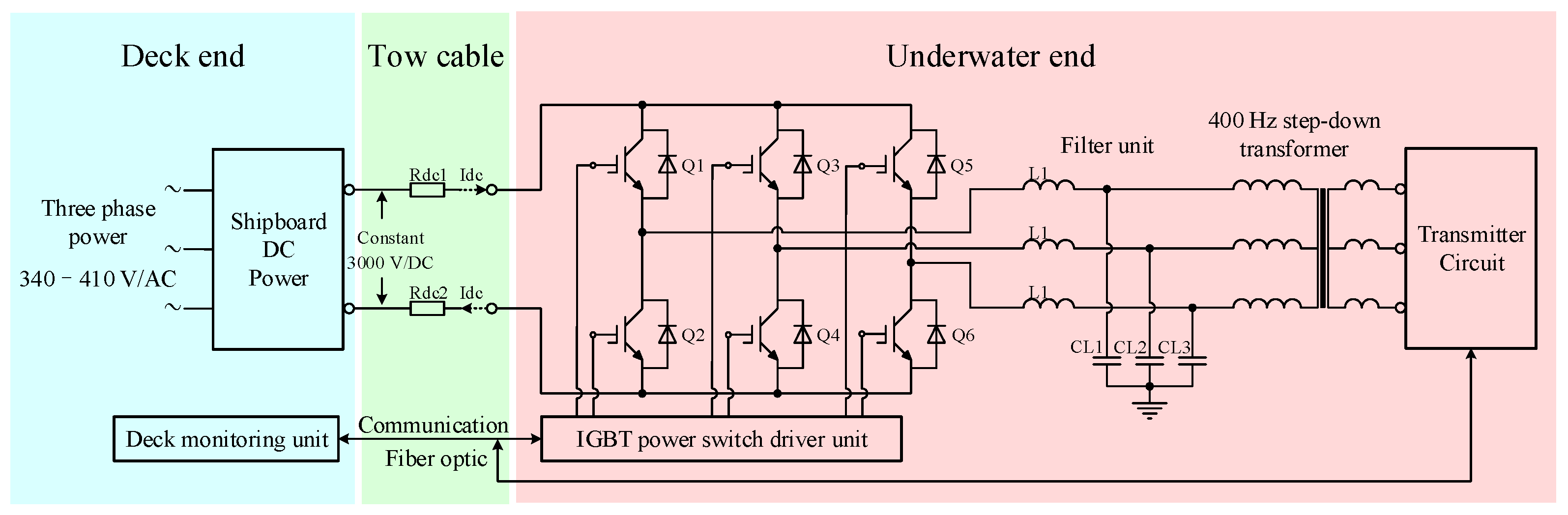
3. MCSEM Underwater High-Voltage DC Power Switching Scheme
3.1. DC Switching Unit
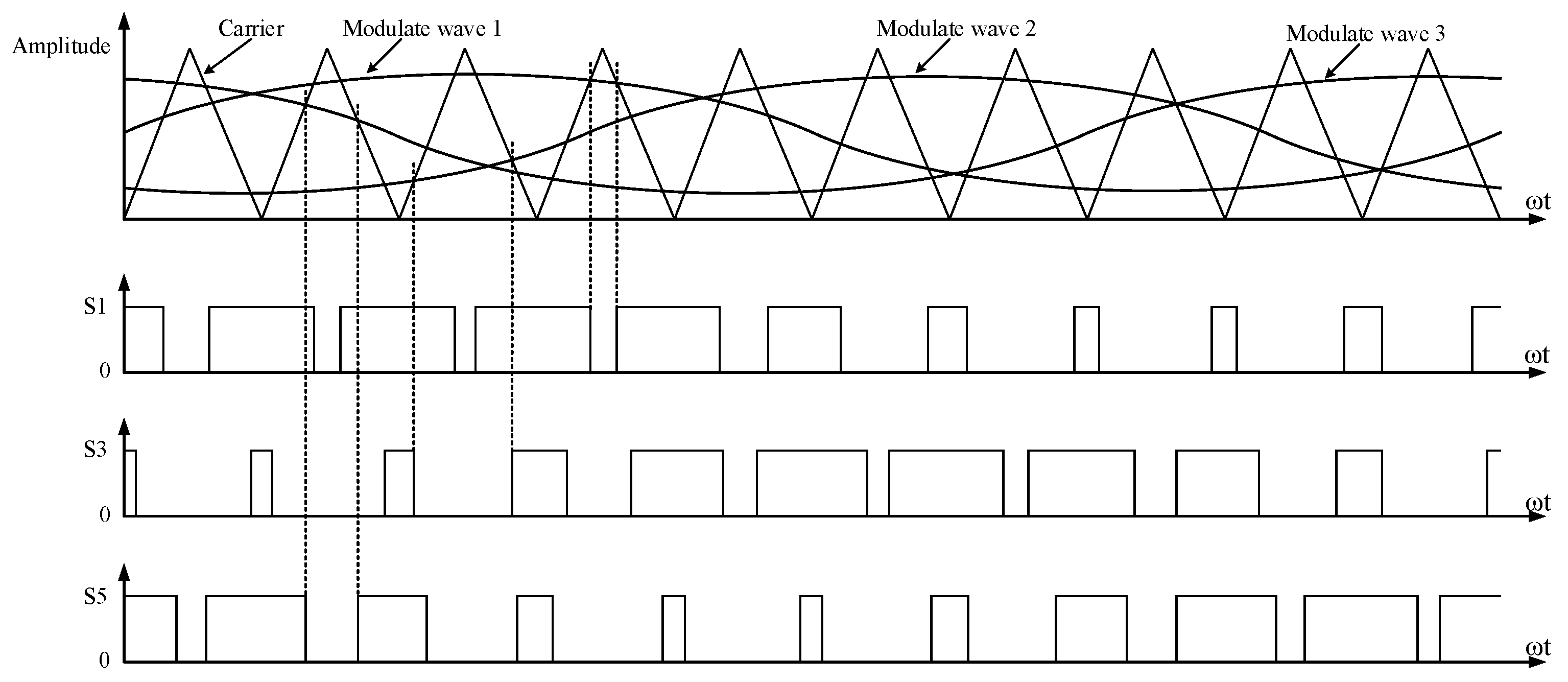
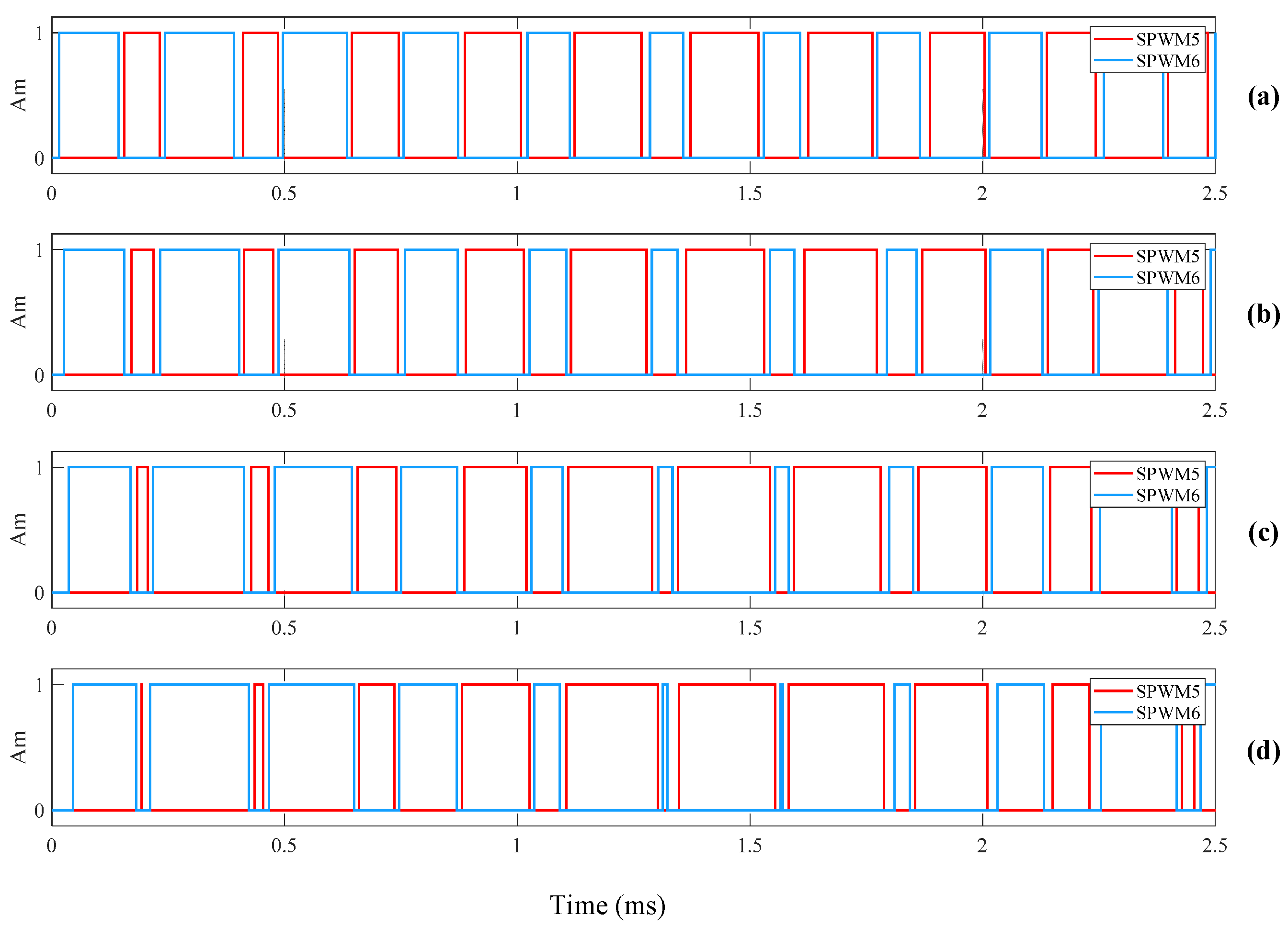
3.2. SPWM Control Method
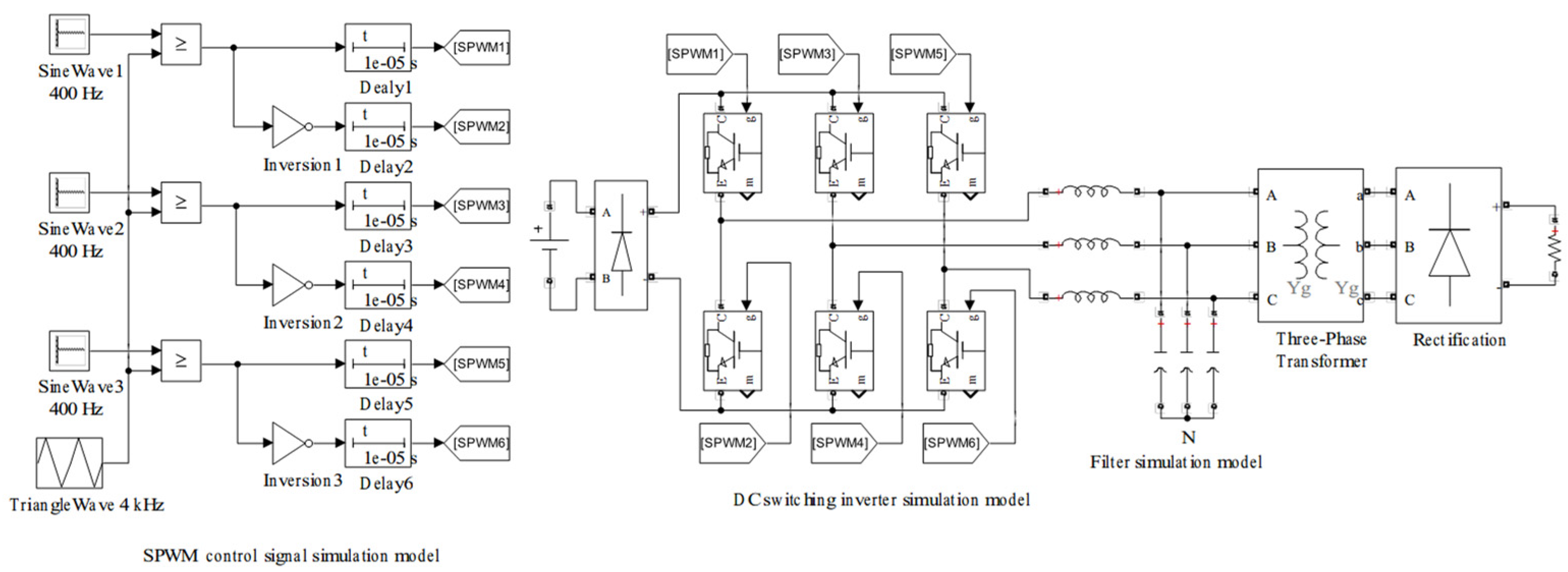
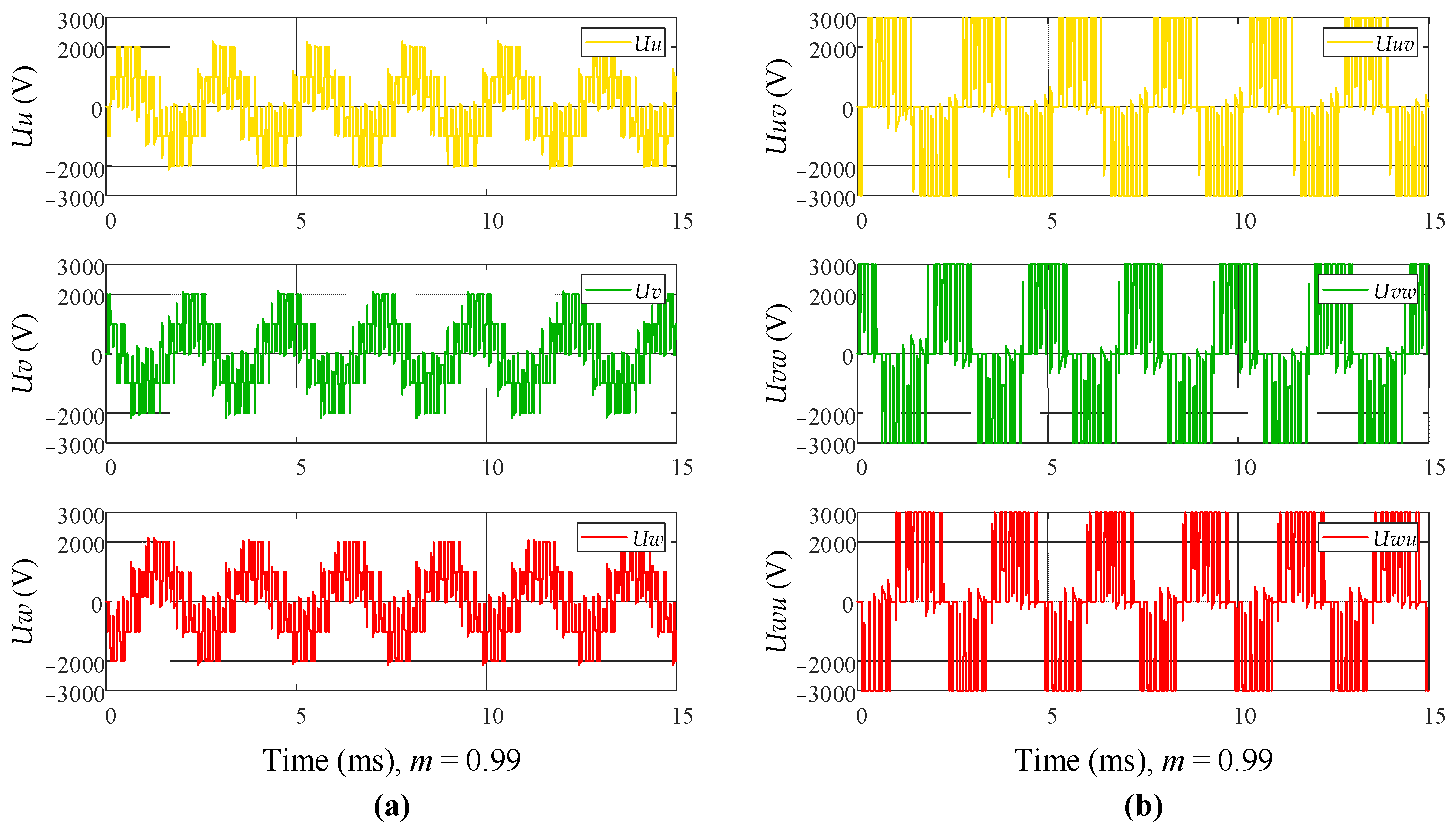
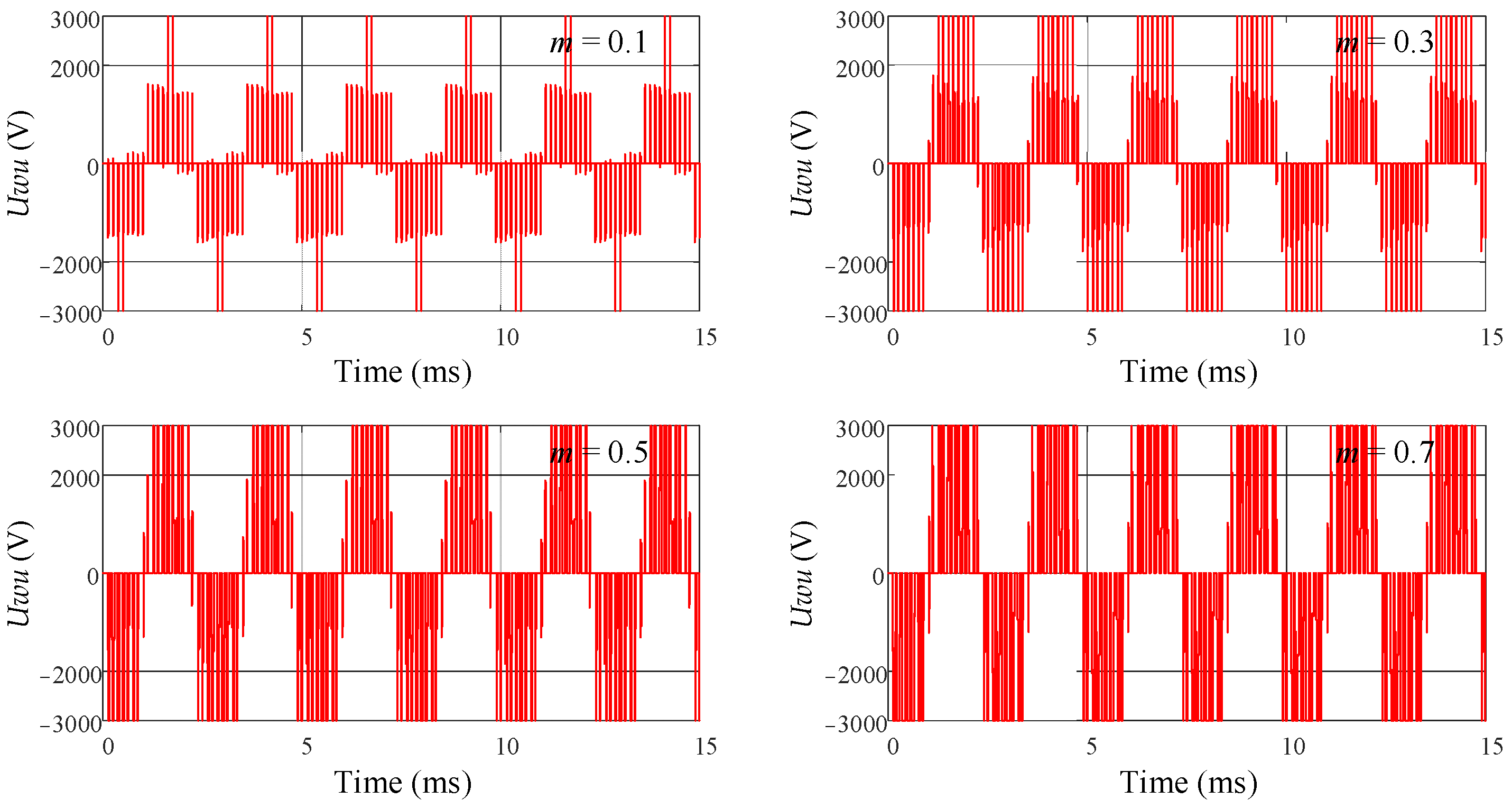
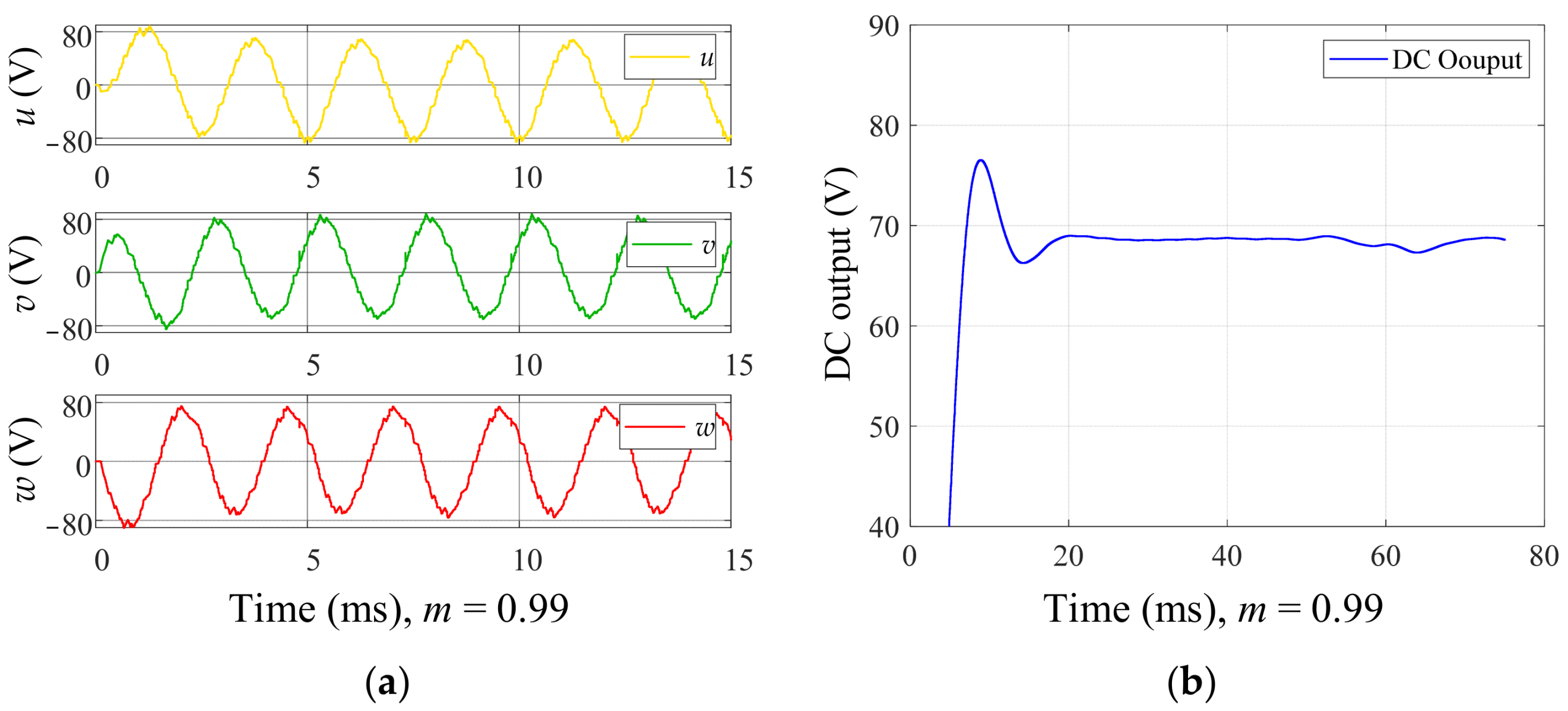
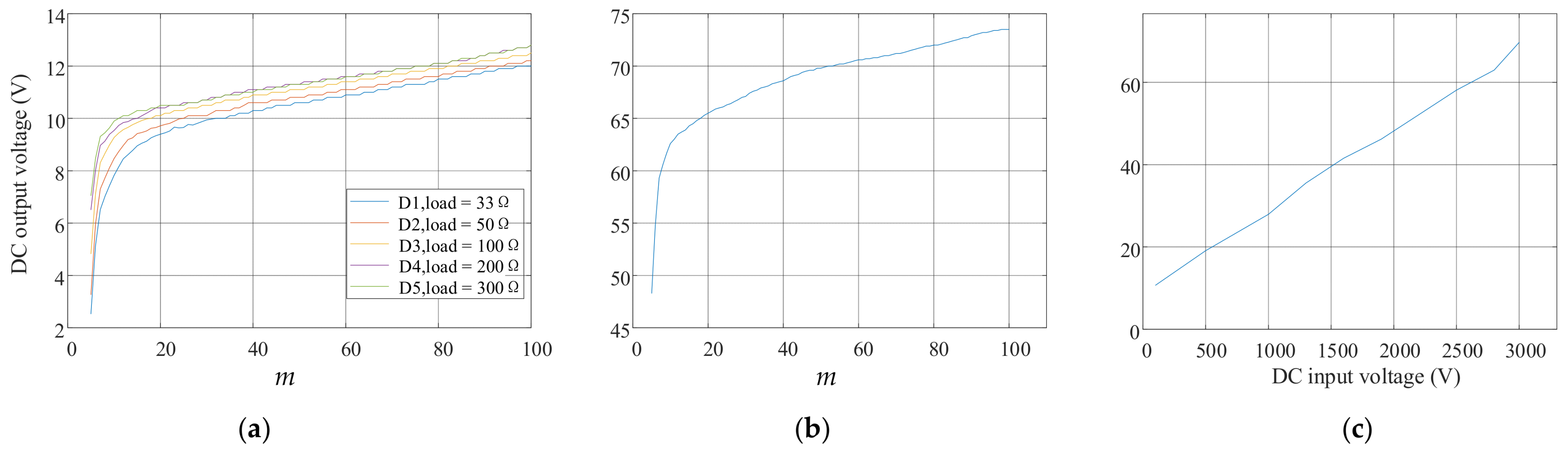
4. Simulation Analysis of DC Switching Inverter
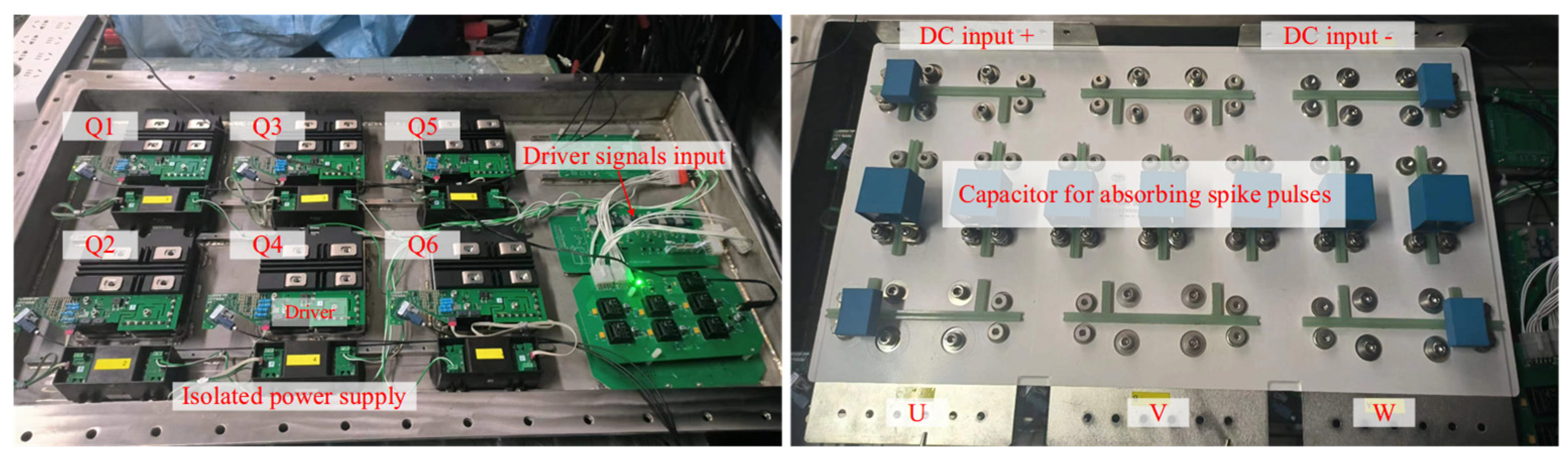
5. Test
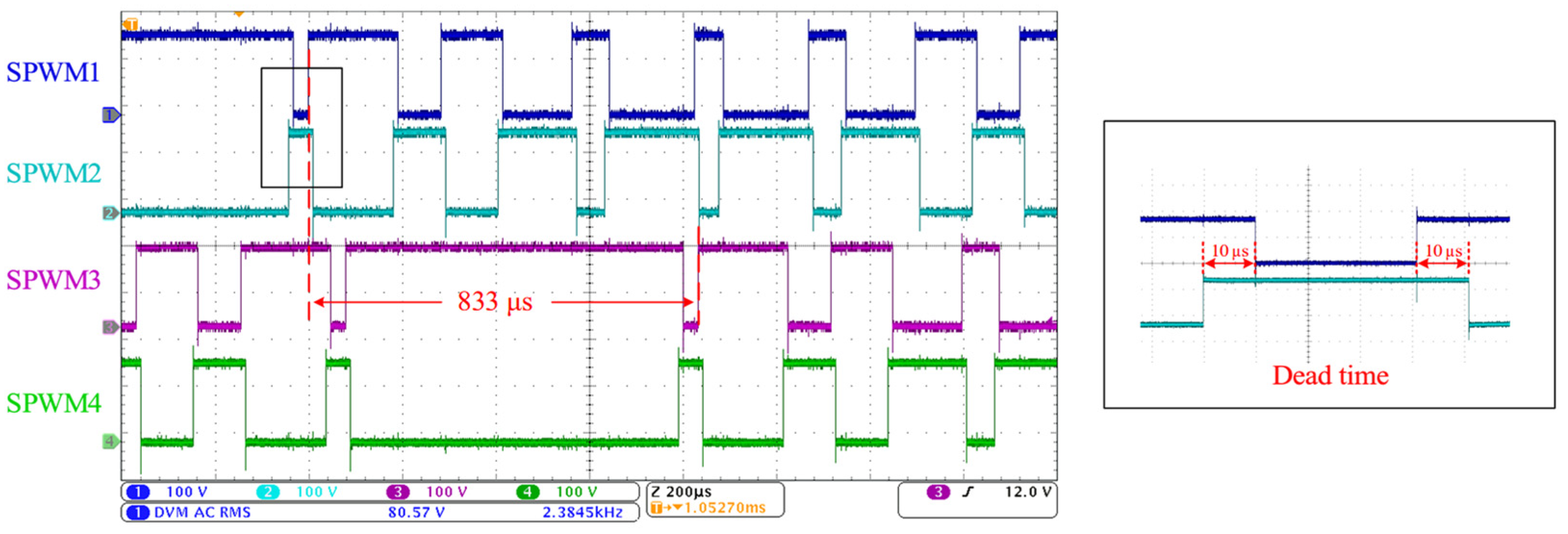
5.1. SPWM Control and DC Output Test
5.2. DC Power Supply Output Current Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
List of Abbreviations
| MCSEM | marine controlled source electromagnetic |
| AC | alternating current |
| DC | direct current |
| IGBT | insulated gate bipolar transistor |
| SPWM | sinusoidal pulse width modulation |
References
- Cox, C.; Constable, S.; Chave, A.; Webb, S. Controlled-source electromagnetic sounding of the oceanic lithosphere. Nature 1986, 320, 52–54. [Google Scholar] [CrossRef]
- Edwards, R.; Chave, A. A transient electric dipole-dipole method for mapping the conductivity of the sea floor. Geophysics 1986, 51, 984–987. [Google Scholar] [CrossRef]
- Constable, S. Ten years of marine CSEM for hydrocarbon exploration. Geophysics 2010, 75, 5. [Google Scholar] [CrossRef]
- Tao, H.; Yang, N.; Wang, H. Cascaded controllable source circuit and control of electromagnetic transmitters for deep sea exploration. J. Power Electron. 2024, 24, 181–191. [Google Scholar] [CrossRef]
- Tao, H.; Zheng, Z.; Guo, L. Characteristic Analysis of Cascading-Combination DC/DC Controlled-Source Circuit for Marine Electromagnetic Transmitter. Electr. Power Compon. Syst. 2023, 51, 1439–1454. [Google Scholar] [CrossRef]
- Meng, W.; Ming, D.; Qingxian, Z.; Xianhu, L.; Jianen, J. Two types of marine controlled source electromagnetic transmitters. Geophys. Prospect. 2015, 63, 1403–1419. [Google Scholar]
- Wang, M.; Deng, M.; Wu, Z.; Luo, X.; Jing, J.; Chen, K. The deep-tow marine controlled-source electromagnetic transmitter system for gas hydrate exploration. J. Appl. Geophys. 2017, 137, 138–144. [Google Scholar] [CrossRef]
- Wang, M.; Deng, M.; Wu, Z.-L.; Luo, X.-H.; Jing, J.-E.; Chen, K. New type deployed marine controlled source electromagnetic transmitter system and its experiment application. Chin. J. Geophys. 2017, 60, 4253–4261. [Google Scholar]
- Edwards, N. Marine Controlled Source Electromagnetics: Principles, Methodologies, Future Commercial Applications. Surv. Geophys. 2005, 26, 675–700. [Google Scholar] [CrossRef]
- Constable, S.; Srnka, L.J. An introduction to marine controlled-source electromagnetic methods for hydrocarbon exploration. Geophysics 2007, 72, WA3–WA12. [Google Scholar] [CrossRef]
- Weitemeyer, K.A.; Constable, S.C.; Key, K.W.; Behrens, J.P. First results from a marine controlled-source electromagnetic survey to detect gas hydrates offshore Oregon. Geophys. Res. Lett. 2006, 33, 1–4. [Google Scholar] [CrossRef]
- Chen, K.; Deng, M.; Yu, P.; Yang, Q.; Luo, X.H.; Yi, X.P. A near-seafloor-towed CSEM receiver for deeper target prospecting. Terr. Atmos. Ocean. Sci. 2020, 31, 565–577. [Google Scholar] [CrossRef]
- Andreis, D.; MacGregor, L. Controlled-source electromagnetic sounding in shallow water:: Principles and applications. Geophysics 2008, 73, F21–F32. [Google Scholar] [CrossRef]
- Constable, S. Review paper: Instrumentation for marine magnetotelluric and controlled source electromagnetic sounding. Geophys. Prospect. 2013, 61, 505–532. [Google Scholar] [CrossRef]
- Wang, M.; Deng, M.; Yu, P.; Yin, C.; Chen, K.; Luo, X. High-power time-frequency transmission and multi-chain cable multi-component electromagnetic system for deep-water exploration. Chin. J. Geophys. 2022, 65, 3664–3673. [Google Scholar]
- Wang, M.; Ming, D.; Li, X.; Zhang, Z.; Yue, H.; Zhang, T.; Duan, N.; Ma, X. The latest development of Marine controllable source electromagnetic transmitter. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Changchun, China, 2021; p. 012137. [Google Scholar]
- Watson, N.R.; Watson, J.D. An Overview of HVDC Technology. Energies 2020, 13, 4342. [Google Scholar] [CrossRef]
- Stan, A.; Costinaș, S.; Ion, G. Overview and assessment of HVDC current applications and future trends. Energies 2022, 15, 1193. [Google Scholar] [CrossRef]
- Cuong, N.X.; Do Nhu, Y. Effect of Voltage Unbalances on the Performance of a Three-phase Transformer. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Changchun, China, 2022; p. 012050. [Google Scholar]
- Ming, D.; Wenbo, W.; Wenbo, Z.; Yan, S.; Yanjun, L.; Meng, W. Electric field responses of different gas hydrate models excited by a horizontal electric dipole source with changing arrangements. Pet. Explor. Dev. 2010, 37, 438–442. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, H.-Q.; Wu, Z.-L.; Sheng, Y.; Luo, X.-H.; Jing, J.-E.; Chen, K. Marine controlled source electromagnetic launch system for natural gas hydrate resource exploration. Chin. J. Geophys. 2013, 56, 3708–3717. [Google Scholar]
- Deng, M.; Wei, W.B.; Sheng, Y.; Jing, J.E.; He, S.Y.; Luo, X.H.; Shi, X.Y. Several theoretical points and instrument technology of magnetotelluric data acquisition in deep water. Chin. J. Geophys. Chin. Ed. 2013, 56, 3610–3618. [Google Scholar]
- Maheshri, S.; Khampariya, P. Simulation of single phase SPWM (Unipolar) inverter. Int. J. Innov. Res. Adv. Eng. 2014, 1, 42711887. [Google Scholar]
- Ahn, S.-H.; Ryoo, H.-J.; Gong, J.-W.; Jang, S.-R. Low-ripple and high-precision high-voltage DC power supply for pulsed power applications. IEEE Trans. Plasma Sci. 2014, 42, 3023–3033. [Google Scholar] [CrossRef]
- Huang, J.; Shi, H. Reducing the common-mode voltage through carrier peak position modulation in an SPWM three-phase inverter. IEEE Trans. Power Electron. 2014, 29, 4490–4495. [Google Scholar] [CrossRef]
- Yuye, W.; Zhiwei, C. Research of three-phase inverter based on SPWM. In Proceedings of the 2010 International Conference on Information, Networking and Automation (ICINA), Kunming, China, 18–19 October 2010; pp. V2-20–V2-23. [Google Scholar]
- Zhou, G.; Zhao, H.; Mao, G.; Zhou, S.; Xu, S. Overview and Classification of Modulation Techniques of Switching Converters. Proc. Chin. Soc. Electr. Eng. 2018, 38, 6383–6400. [Google Scholar]
- Jin, T.; Liu, Y. Design and validation of multi-SPWM pulse generator. Chin. J. Sci. Instrum. 2018, 39, 208–216. [Google Scholar]
- Weibo, L.; Peng, F.; Junfeng, P.; Chunhao, H.; Zhongtian, Z. Asymmetric regular sampling SPWM method based on tangent-secant midpoint approximation applied to intermediate frequency inverter power supply. Chin. J. Ship Res. 2022, 17, 268–277, 288. [Google Scholar]
- Zhu, Q.; Chen, J.; Hu, S. On a combined-midpoint SPWM regular-sampling approach. Electr. Mach. Control 2014, 18, 72–78. [Google Scholar]
- Ye, J.; Huang, S.; Liu, L.; Li, L.; Xu, J.; Shen, A. Accurate harmonic calculation for digital SPWM of VSI with dead-time effect. IEEE Trans. Power Electron. 2020, 36, 7892–7902. [Google Scholar] [CrossRef]
- Li, Y.; Li, J.; Zhao, W.; Gong, C. Analysis on the Effect of Dead-time of SPWM Inverter. Power Electron. 2021, 55, 69. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component | Characteristic Parameters |
|---|---|
| IGBT | VCES = 1200 V, IC = 2400 A |
| Laminated busbar | Vrated = 4000 V, Irated = 30 A |
| Transformer | 50:1 |
| Inductor | 22.5 mH |
| Capacitor | 7 μF |
| I | Ud | Id | m |
|---|---|---|---|
| 36.3 A | 220 V | 0.87 A | 0.99 |
| 36.2 A | 300 V | 0.70 A | 0.5 |
| 36.3 A | 410 V | 0.56 A | 0.3 |
| 36.3 A | 1290 V | 0.29 A | 0.1 |
| 53.2 A | 250 V | 1.17 A | 0.99 |
| 53.1 A | 355 V | 0.86 A | 0.5 |
| 53.1 A | 500 V | 0.68 A | 0.3 |
| 53.4 A | 1550 V | 0.36 A | 0.1 |
| 67.8 A | 270 V | 1.41 A | 0.99 |
| 67.7 A | 398 V | 1.01 A | 0.5 |
| 67.6 A | 570 V | 0.78 A | 0.3 |
| 67.7 A | 1758 V | 0.40 A | 0.1 |
| 96 A | 330 V | 1.9 A | 0.99 |
| 95.8 A | 473.5 V | 1.29 A | 0.5 |
| 96 A | 683 V | 0.95 A | 0.3 |
| 95.8 A | 2110 V | 0.46 A | 0.1 |
| AC Voltage/V | Three-Phase Current/V | Load Current/A | ||
|---|---|---|---|---|
| A | B | C | ||
| 171.1 | 0.51 | 0.79 | 0.47 | 36.3 |
| 198.2 | 0.70 | 1.17 | 0.67 | 53.0 |
| 221.2 | 0.92 | 1.53 | 0.83 | 67.9 |
| 260.2 | 1.29 | 2.17 | 1.07 | 95.9 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, Z.; Wang, M.; Luo, X.; Wang, C.; Chen, T. Research on Underwater Constant High-Voltage DC Switching Technology for MCSEM. Sensors 2024, 24, 6598. https://doi.org/10.3390/s24206598
Ren Z, Wang M, Luo X, Wang C, Chen T. Research on Underwater Constant High-Voltage DC Switching Technology for MCSEM. Sensors. 2024; 24(20):6598. https://doi.org/10.3390/s24206598
Chicago/Turabian StyleRen, Zhibin, Meng Wang, Xianhu Luo, Chentao Wang, and Tailong Chen. 2024. "Research on Underwater Constant High-Voltage DC Switching Technology for MCSEM" Sensors 24, no. 20: 6598. https://doi.org/10.3390/s24206598
APA StyleRen, Z., Wang, M., Luo, X., Wang, C., & Chen, T. (2024). Research on Underwater Constant High-Voltage DC Switching Technology for MCSEM. Sensors, 24(20), 6598. https://doi.org/10.3390/s24206598