
Realizing Multi-Parameter Measurement Using PT-Symmetric LC Sensors


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
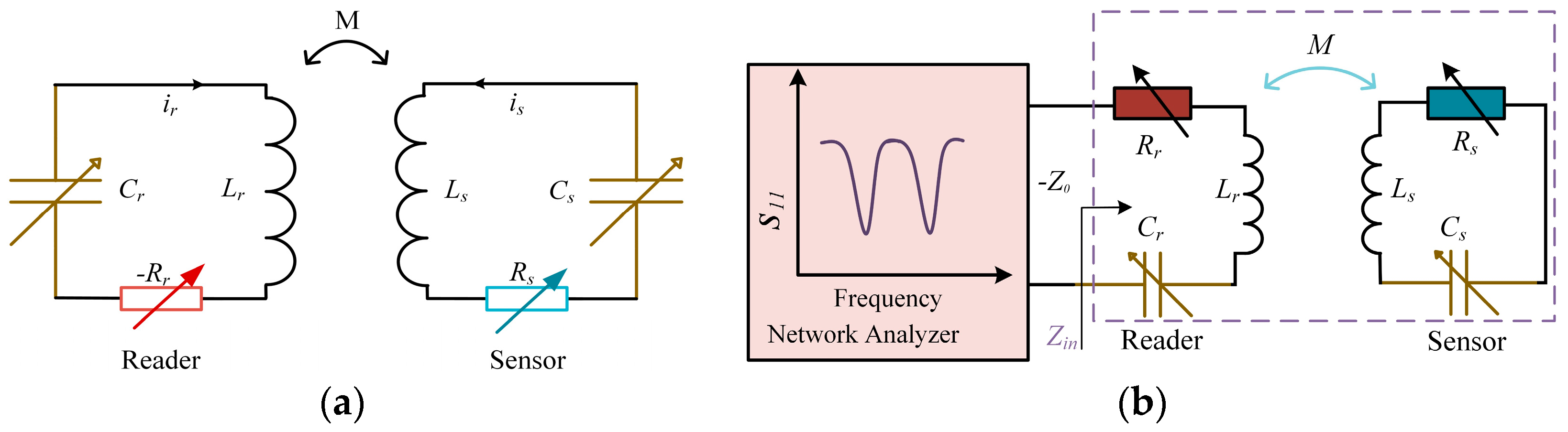
2. Principles of PT-Symmetric Multi-Parameter Measurement
2.1. Dual-Parameter Measurement
2.2. Three-Parameter Measurement
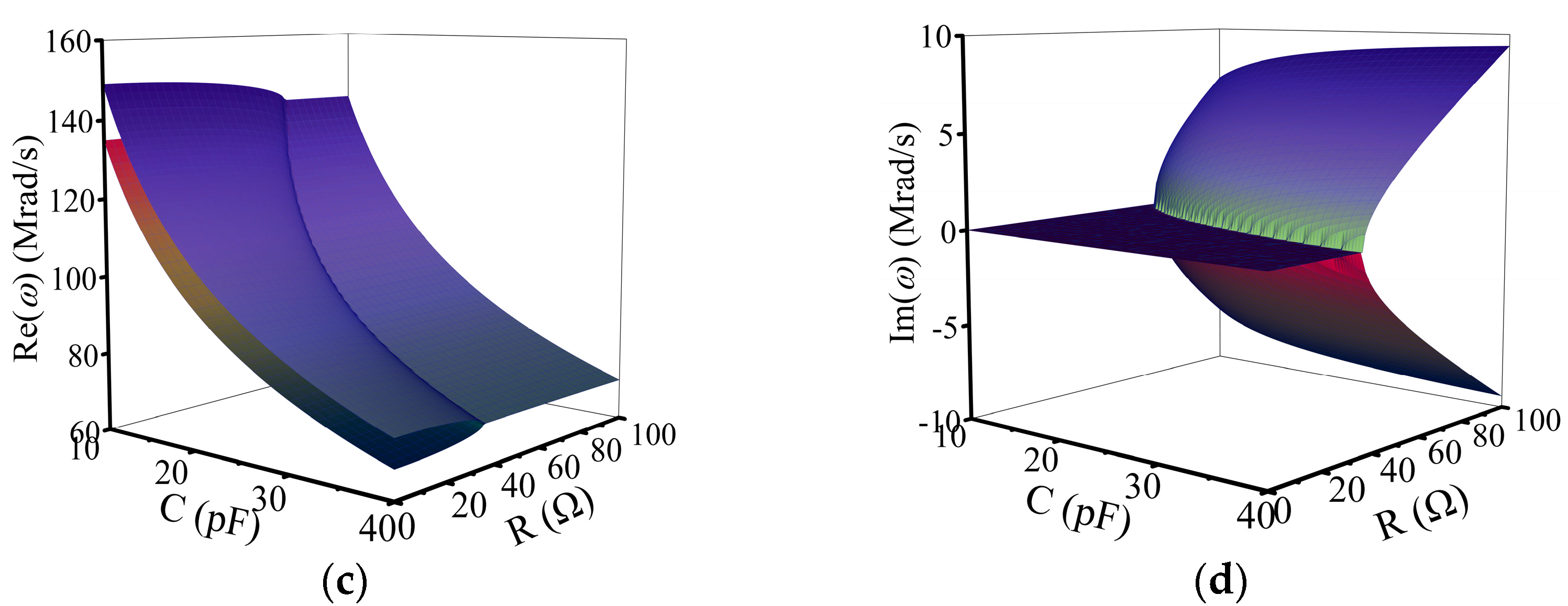
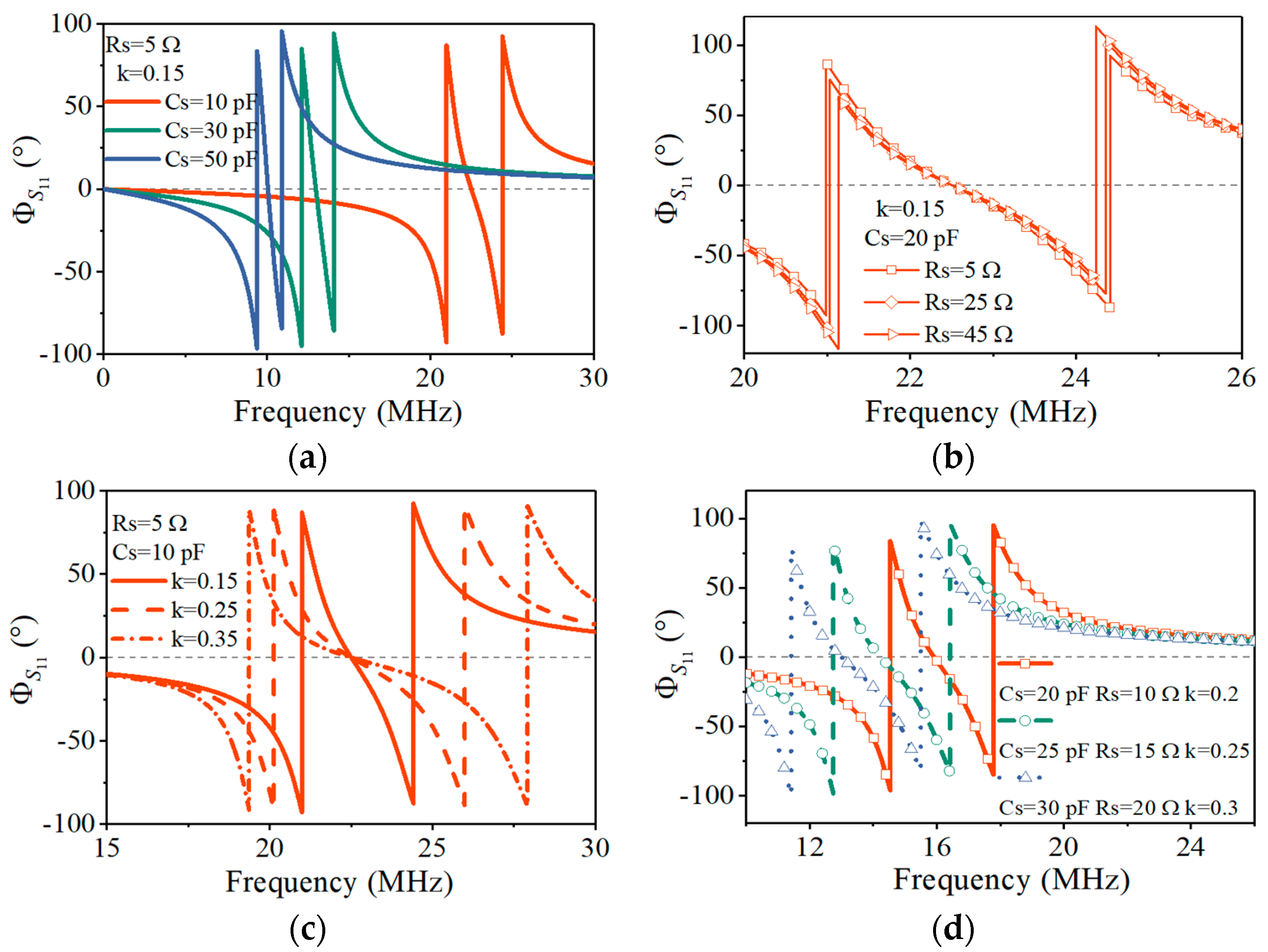
3. Simulation
3.1. Dual-Resonant Frequencies
3.2. Three Resonant Frequencies
4. Experimental Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Huang, Q.A.; Dong, L.; Wang, L.F. LC passive wireless sensors toward a wireless sensing platform: Status, prospects, and challenges. J. Microelectromech. Syst. 2016, 25, 822–841. [Google Scholar] [CrossRef]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of Things for smart cities. IEEE Internet Things. J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Agu, E.; Pedersen, P.; Strong, D.; Tulu, B.; He, Q.; Wang, L.; Li, Y.J. The smartphone as a medical device: Assessing enablers, benefits and challenges. In Proceedings of the IEEE International Conference on Sensing, Communications and Networking (SECON), New Orleans, LA, USA, 24–27 June 2013. [Google Scholar]
- Ren, Q.Y.; Wang, L.F.; Huang, J.Q.; Zhang, C.; Huang, Q.A. Simultaneous remote sensing of temperature and humidity by LC-type passive wireless sensors. J. Microelectromech. Syst. 2015, 24, 1117–1123. [Google Scholar] [CrossRef]
- Zhang, C.; Huang, J.Q.; Huang, Q.A. Design of LC-type passive wireless multi-parameter sensor. In Proceedings of the 8th Annual IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Suzhou, China, 7–10 April 2013. [Google Scholar]
- Dong, L.; Wang, L.F.; Huang, Q.A. Implementation of multiparameter monitoring by an LC-type passive wireless sensor through specific winding stacked inductors. IEEE Internet Things. J. 2015, 2, 168–174. [Google Scholar] [CrossRef]
- Tan, Q.; Luo, T.; Wei, T.; Liu, J.; Lin, L.; Xiong, J. A wireless passive pressure and temperature sensor via a dual LC resonant circuit in harsh environments. J. Microelectromech. Syst. 2017, 26, 351–356. [Google Scholar] [CrossRef]
- Deng, W.J.; Wang, L.F.; Dong, L.; Huang, Q.A. Symmetric LC Circuit Configurations for Passive Wireless Multifunctional Sensors. J. Microelectromech. Syst. 2019, 28, 344–350. [Google Scholar] [CrossRef]
- Dong, L.; Wang, L.F.; Huang, Q.A. An LC passive wireless multifunctional sensor using a relay switch. IEEE Sens. J. 2016, 16, 4968–4973. [Google Scholar] [CrossRef]
- Bende, C.M. PT Symmetry in Quantum and Classical Physics; World Scientific Publishing: Singapore, 2019. [Google Scholar]
- Christodoulides, D.; Yang, J. Parity-time Symmetry and Its Applications; Springer: Singapore; Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Chen, D.Y.; Dong, L.; Huang, Q.A. PT-Symmetric LC Passive Wireless Sensing. Sensors 2023, 23, 5191. [Google Scholar] [CrossRef] [PubMed]
- Chen, P.Y.; Sakhdari, M.; Hajizadegan, M.; Cui, Q.; Cheng, M.; El-Ganainy, R.; Alù, A. Generalized parity–time symmetry condition for enhanced sensor telemetry. Nat. Electron. 2018, 1, 297–304. [Google Scholar] [CrossRef]
- Sakhdari, M.; Hajizadegan, M.; Li, Y.; Cheng, M.; Hung, J.C.; Chen, P.Y. Ultrasensitive, parity–time-symmetric wireless reactive and resistive sensors. IEEE Sens. J. 2018, 18, 9548–9555. [Google Scholar] [CrossRef]
- Kananian, S.; Alexopoulos, G.; Poon, A.S.Y. Coupling-independent real-time wireless resistive sensing through nonlinear PT symmetry. Phys. Rev. Appl. 2020, 14, 064072. [Google Scholar] [CrossRef]
- Dong, Z.; Li, Z.; Yang, F.; Qiu, C.W.; Ho, J.S. Sensitive readout of implantable microsensors using a wireless system locked to an exceptional point. Nat. Electron. 2019, 2, 335–342. [Google Scholar] [CrossRef]
- Zhou, B.B.; Wang, L.F.; Dong, L.; Huang, Q.A. Observation of the perturbed eigenvalues of PT-symmetric LC resonator systems. J. Phys. Commun. 2021, 5, 045010. [Google Scholar] [CrossRef]
- Zhou, B.B.; Liu, W.D.; Dong, L. The sensitivity of PT-symmetric LC wireless sensors around an exceptional point. Appl. Phys. Lett. 2023, 123, 164103. [Google Scholar] [CrossRef]
- Zhou, B.B.; Deng, W.J.; Wang, L.F.; Dong, L.; Huang, Q.A. Enhancing the remote distance of LC passive wireless sensors by parity-time symmetry breaking. Phys. Rev. Appl. 2020, 13, 064022. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, B.-B.; Chen, D.; Zhang, C.; Dong, L. Realizing Multi-Parameter Measurement Using PT-Symmetric LC Sensors. Sensors 2024, 24, 6570. https://doi.org/10.3390/s24206570
Zhou B-B, Chen D, Zhang C, Dong L. Realizing Multi-Parameter Measurement Using PT-Symmetric LC Sensors. Sensors. 2024; 24(20):6570. https://doi.org/10.3390/s24206570
Chicago/Turabian StyleZhou, Bin-Bin, Dan Chen, Chi Zhang, and Lei Dong. 2024. "Realizing Multi-Parameter Measurement Using PT-Symmetric LC Sensors" Sensors 24, no. 20: 6570. https://doi.org/10.3390/s24206570
APA StyleZhou, B.-B., Chen, D., Zhang, C., & Dong, L. (2024). Realizing Multi-Parameter Measurement Using PT-Symmetric LC Sensors. Sensors, 24(20), 6570. https://doi.org/10.3390/s24206570