
A Framework for Determining the Optimal Vibratory Frequency of Graded Gravel Fillers Using Hammering Modal Approach and ANN

Abstract
1. Introduction
2. The Method of Determining fov
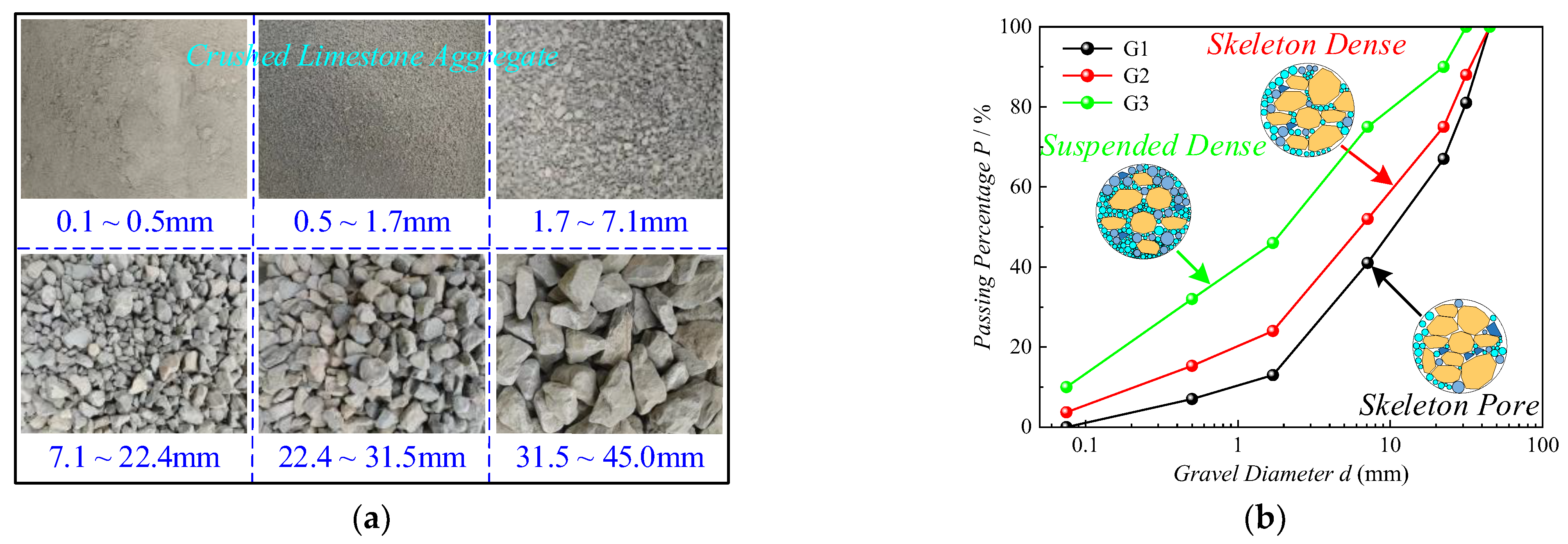
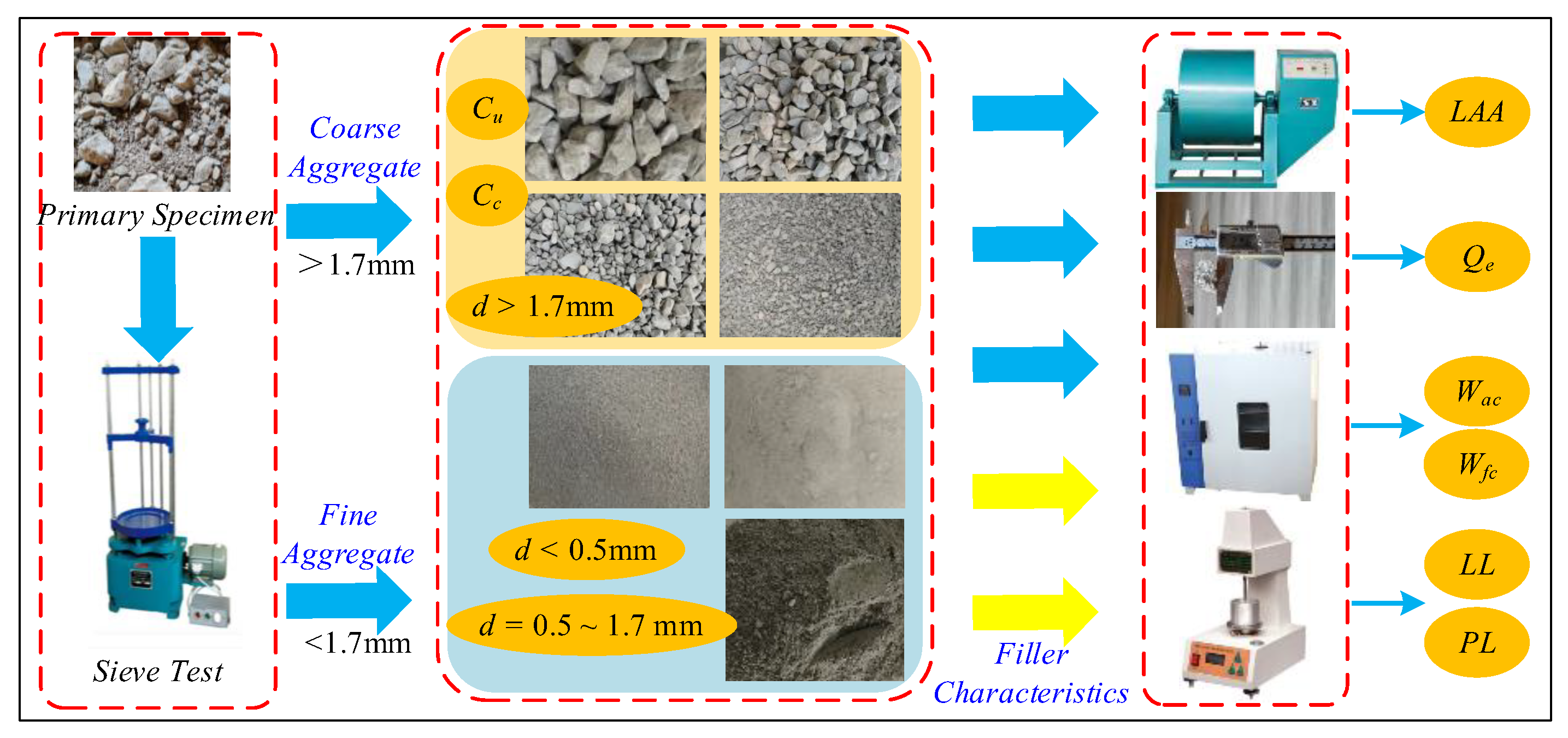
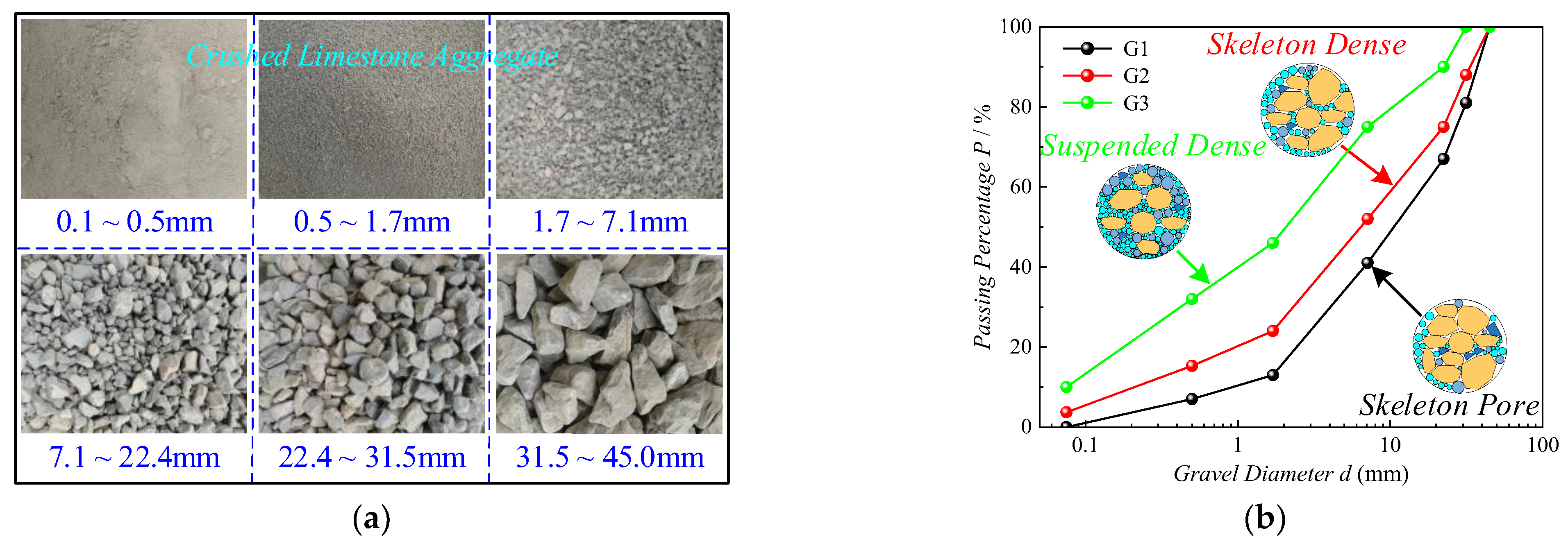
2.1. Material
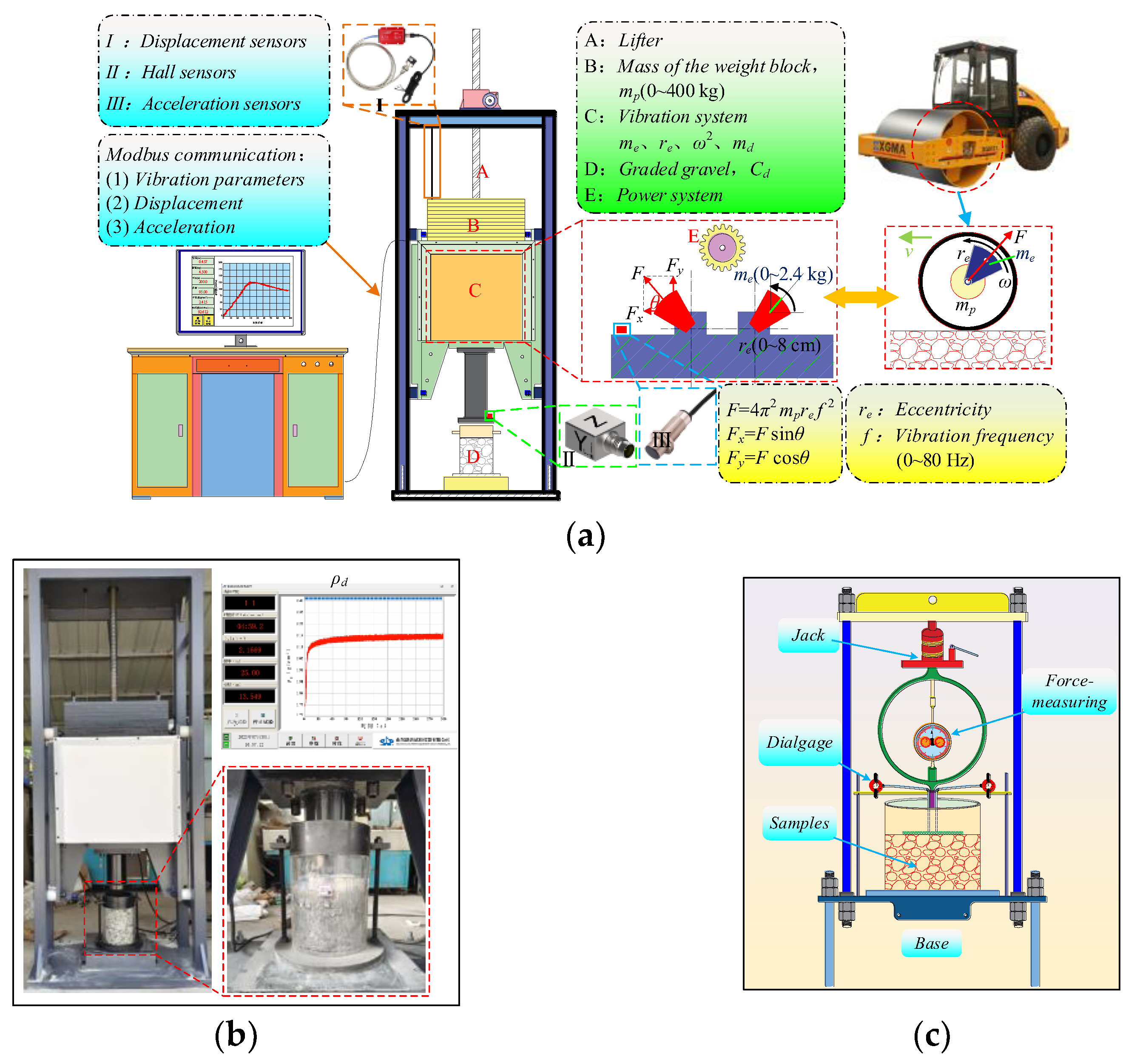
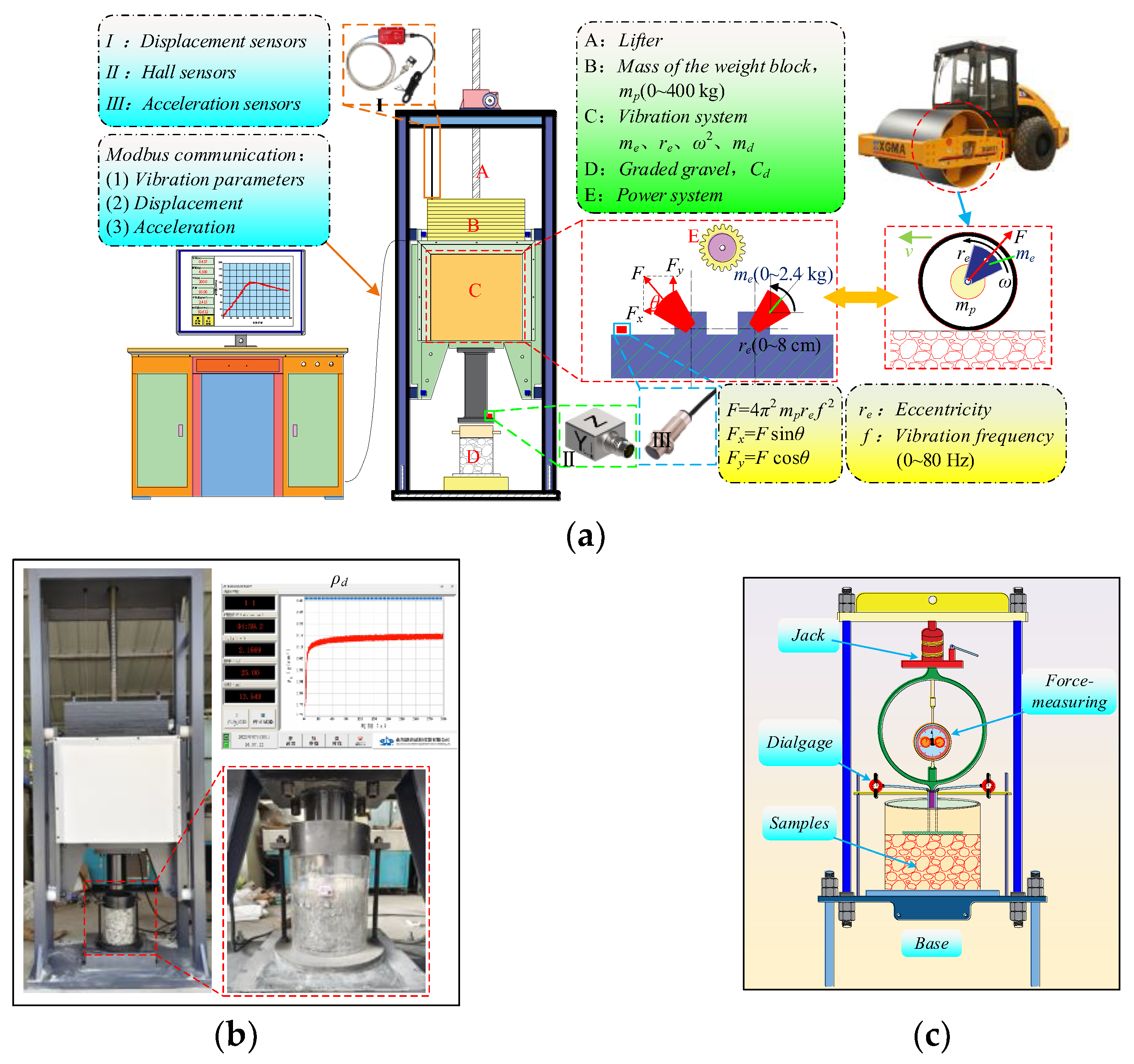
2.2. Experimental Design
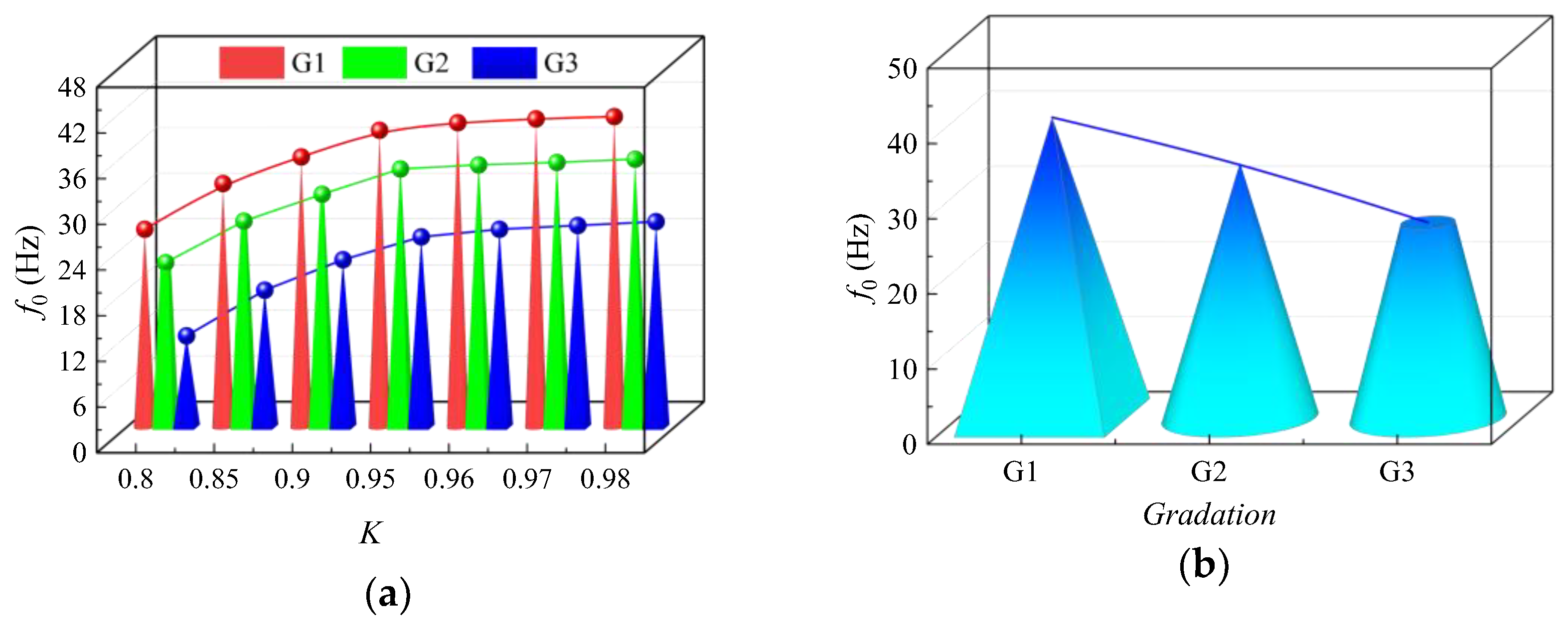
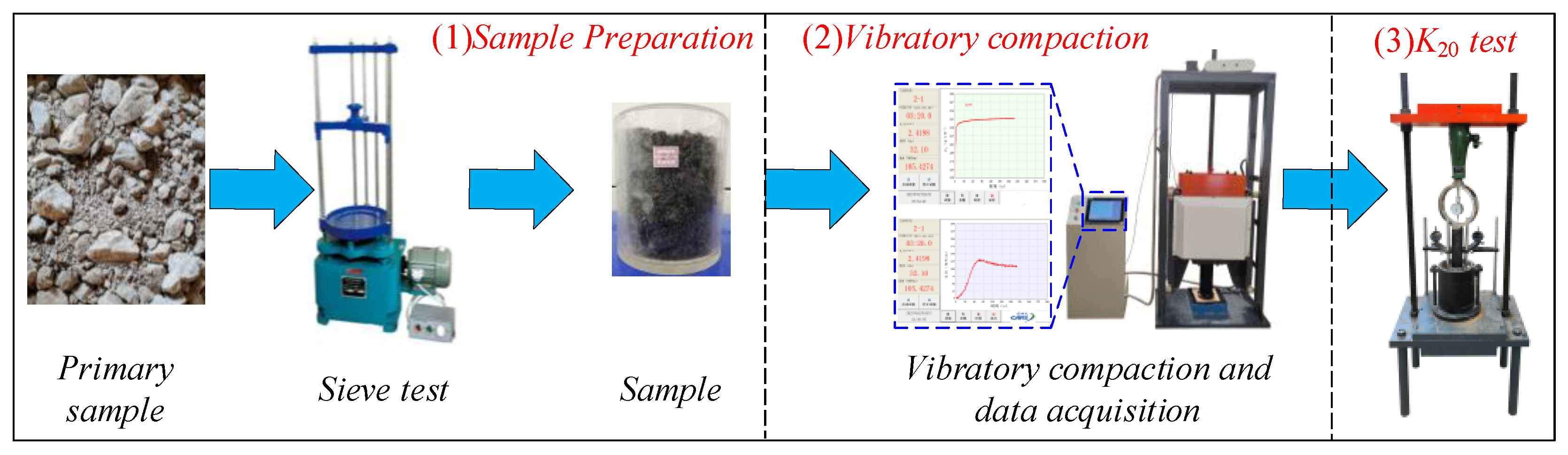
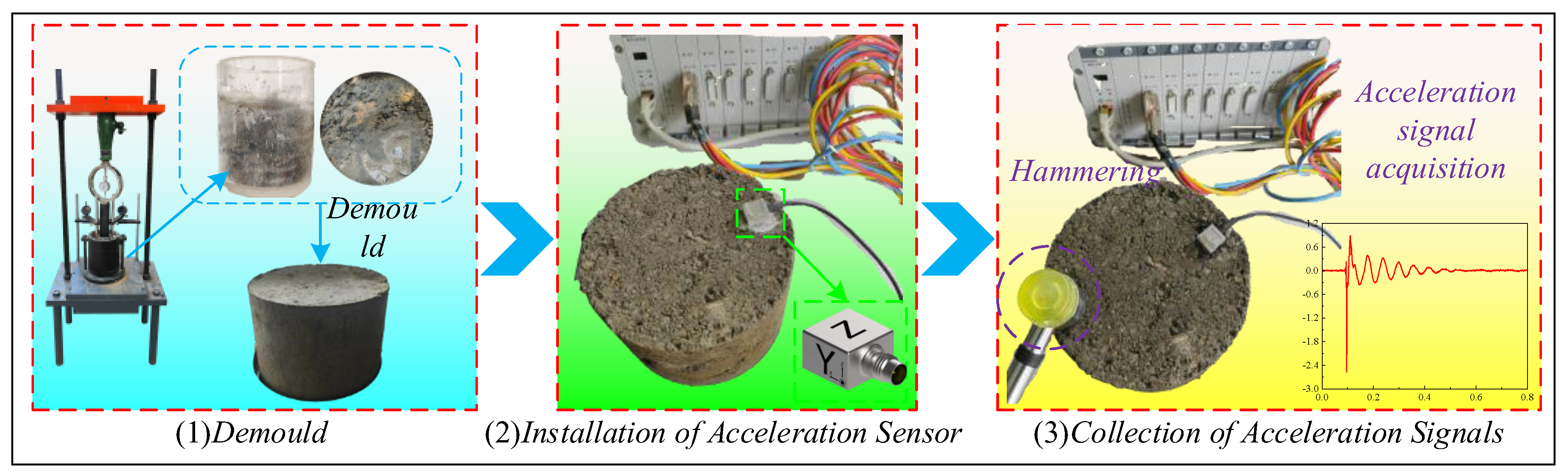
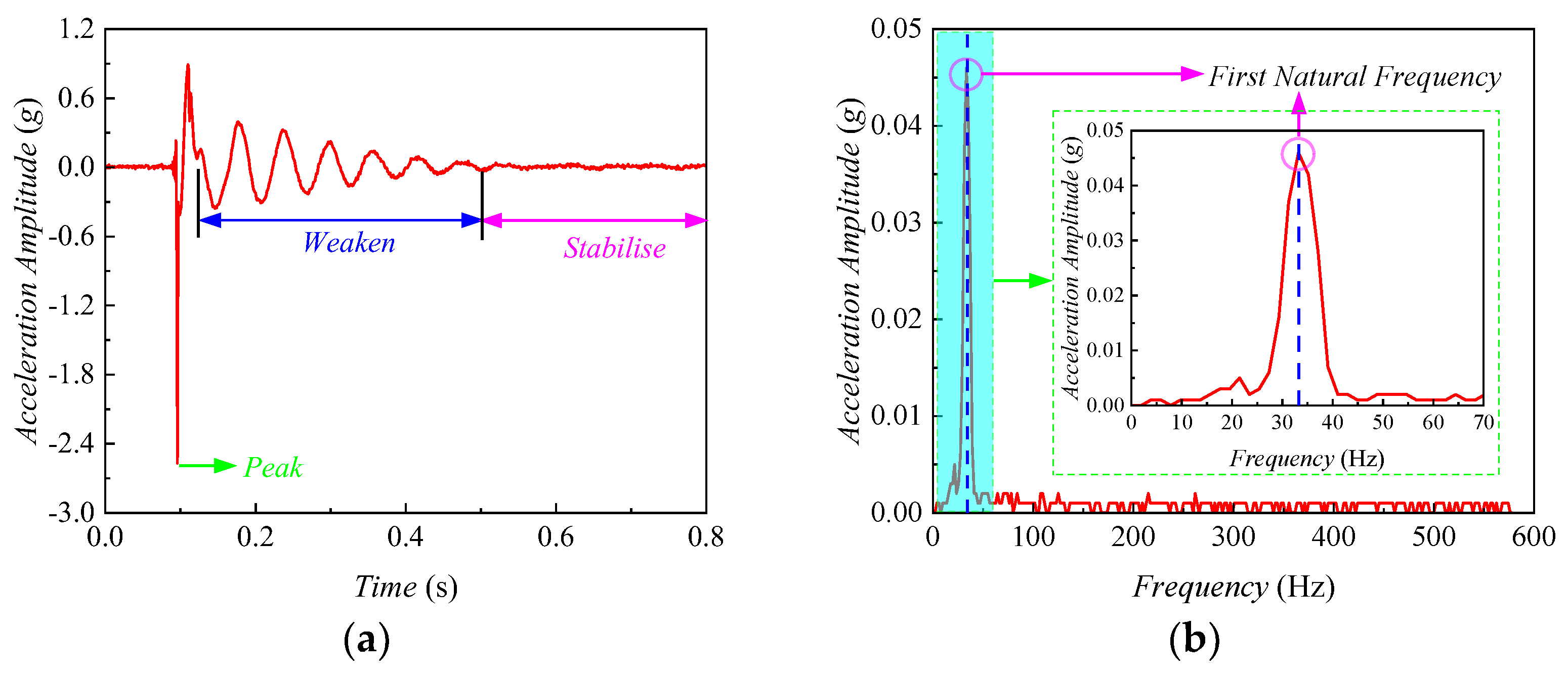
2.3. The Tests of Determining f0
2.4. Relationship between fo and fov
3. ANN-Based Predictive Model for fov
3.1. Key Feature of fov
3.2. Dataset of ANN Model
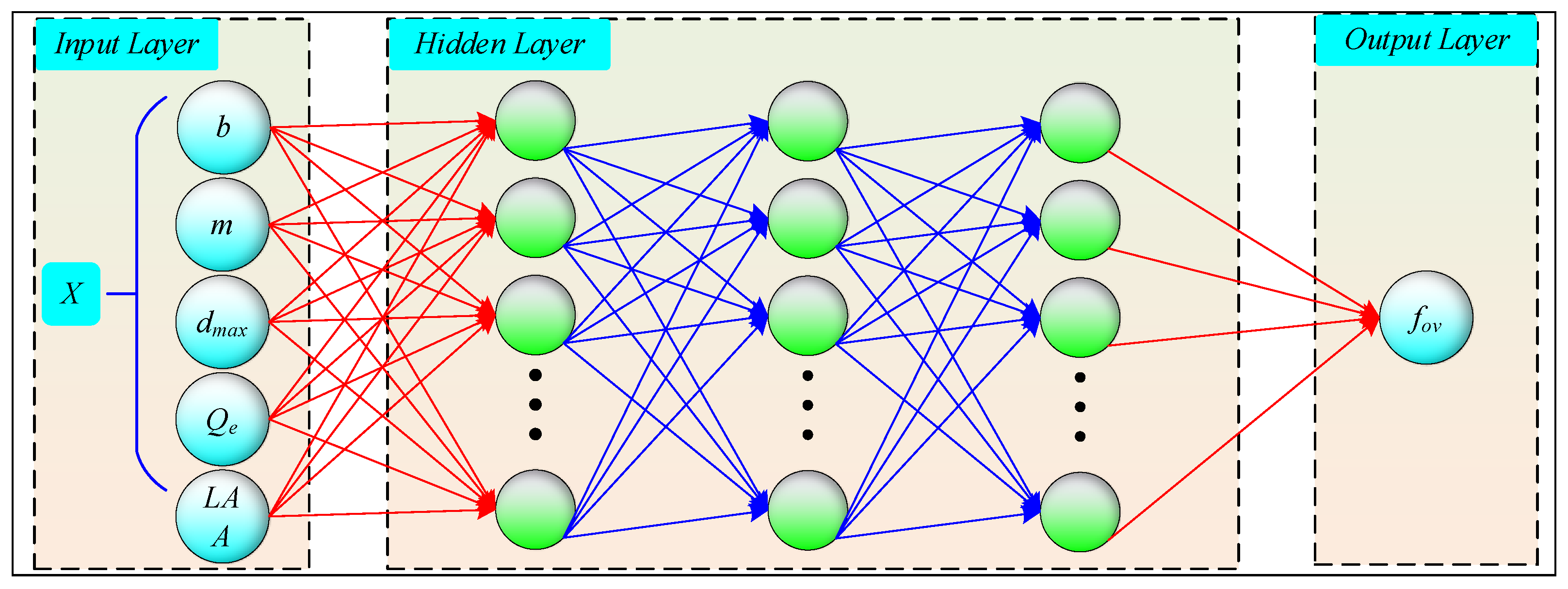
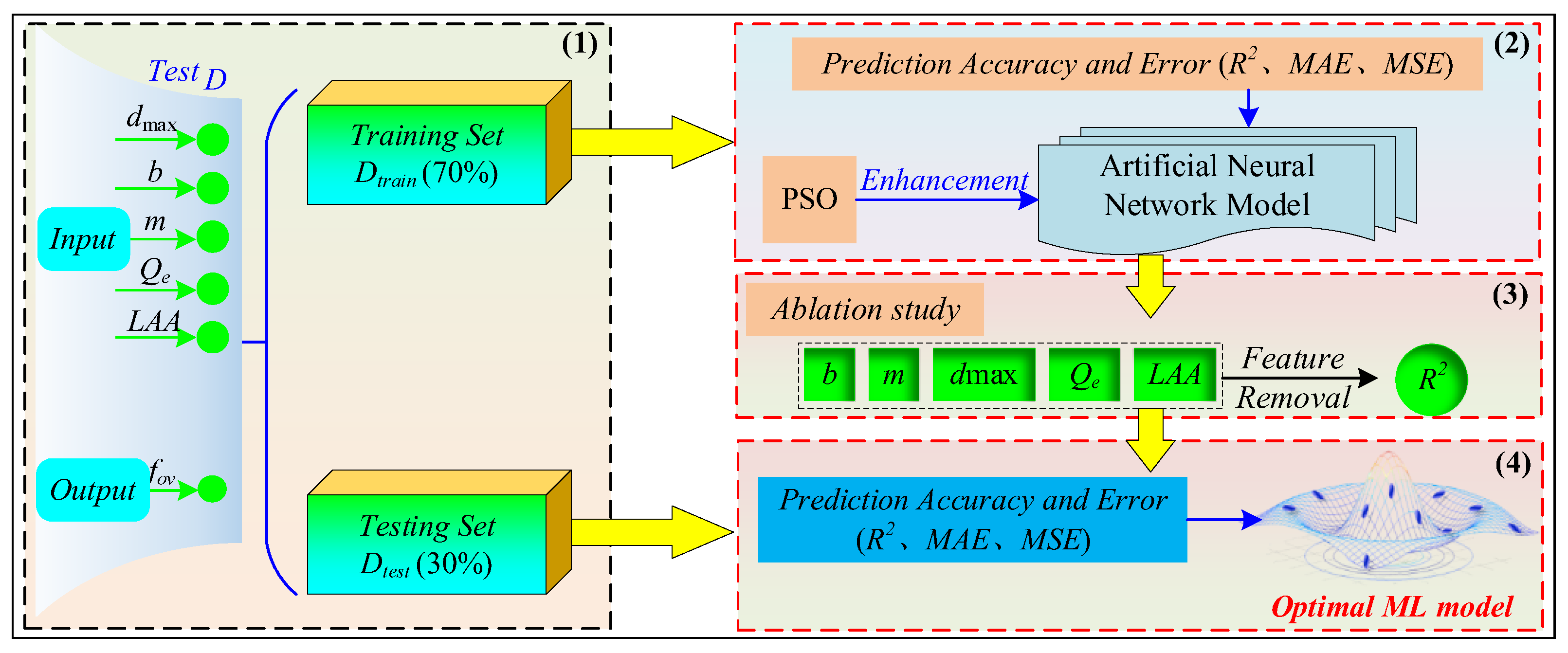
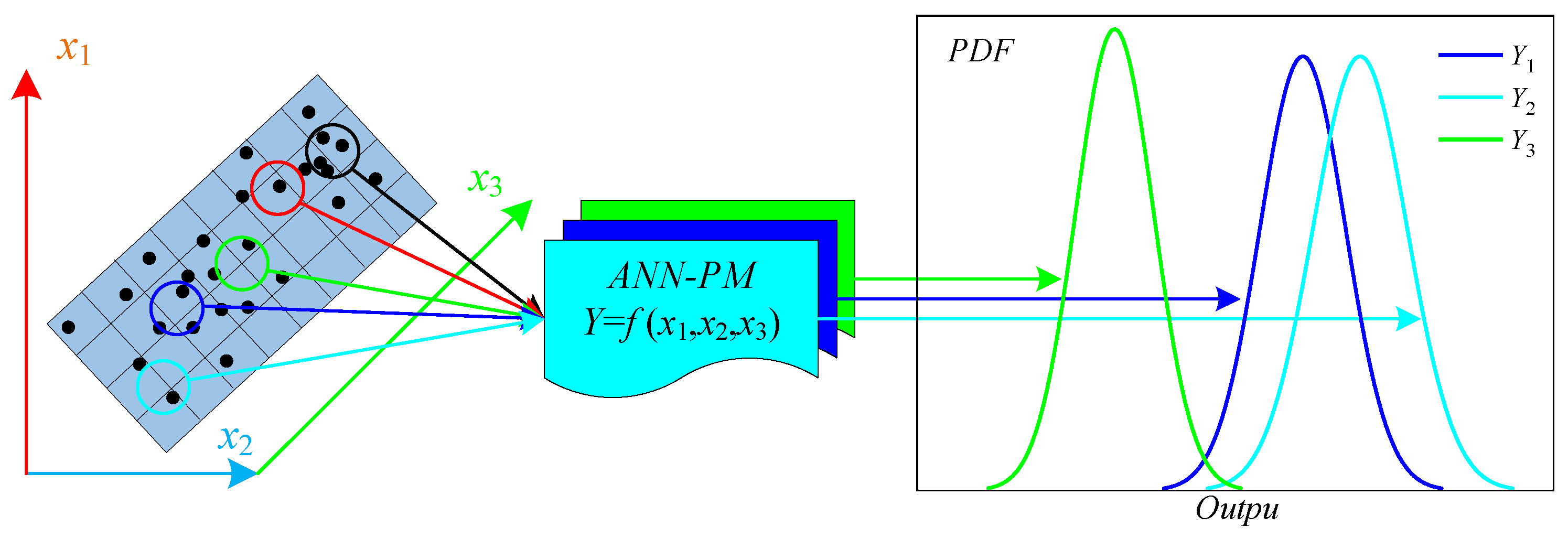
3.3. Establishment and Evaluation of ANN-PM
3.4. Sensitivity Analysis of ANN-PM
4. Results and Analysis
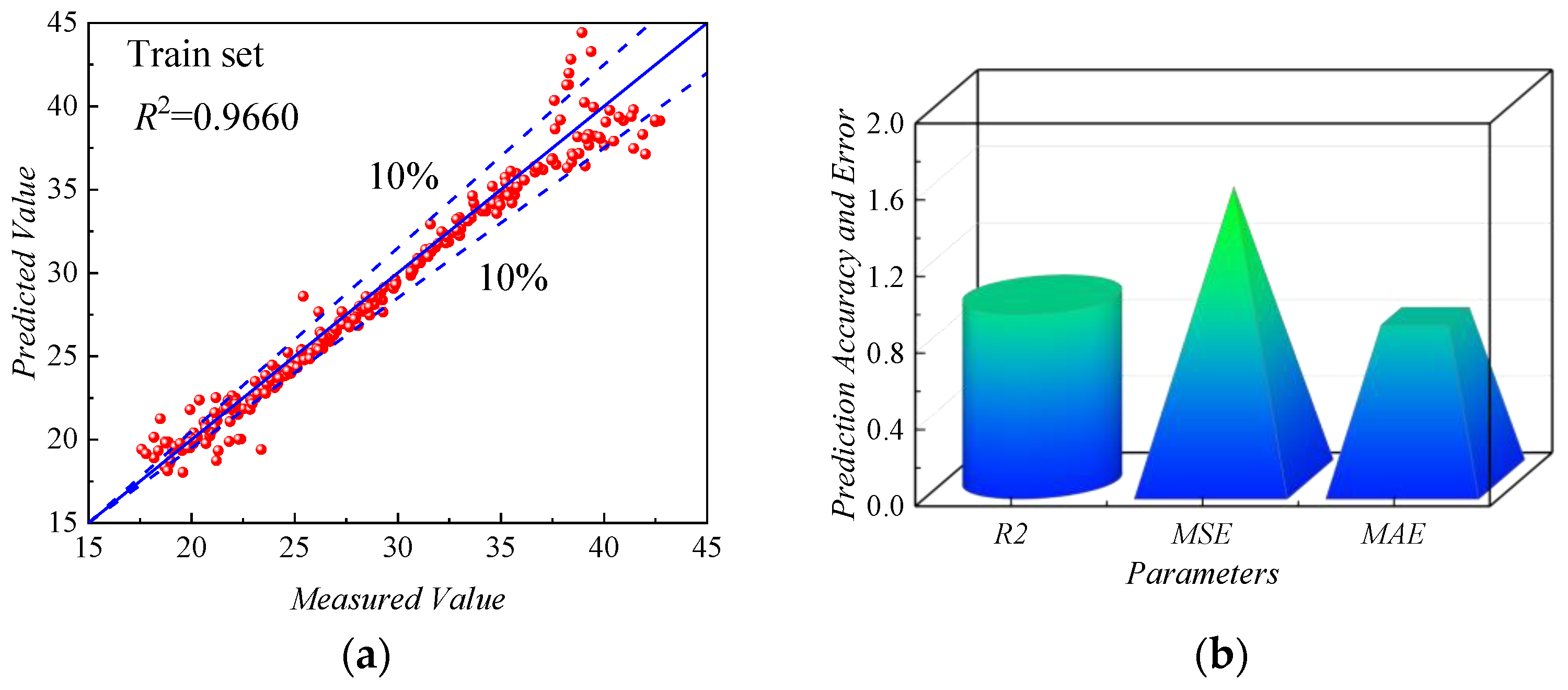
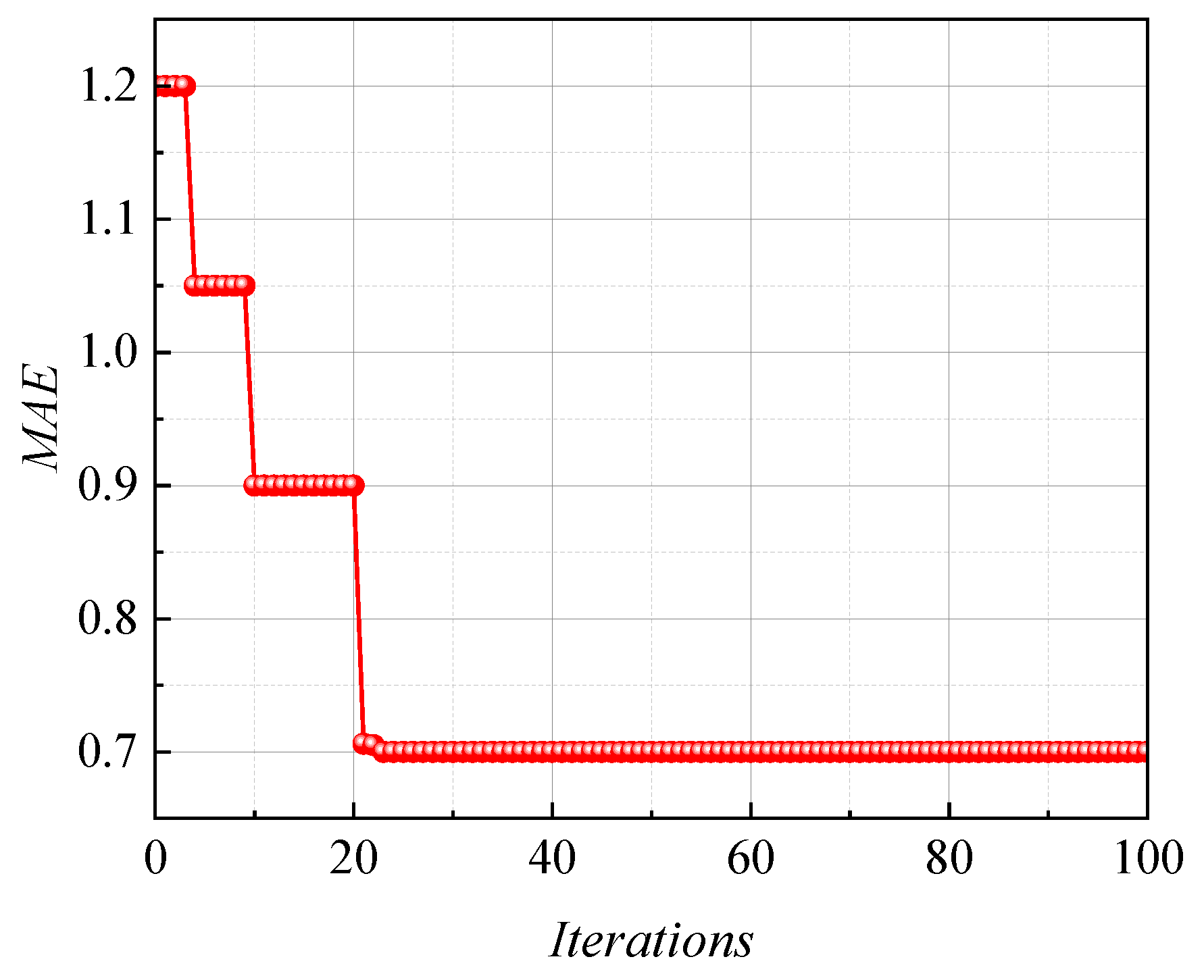
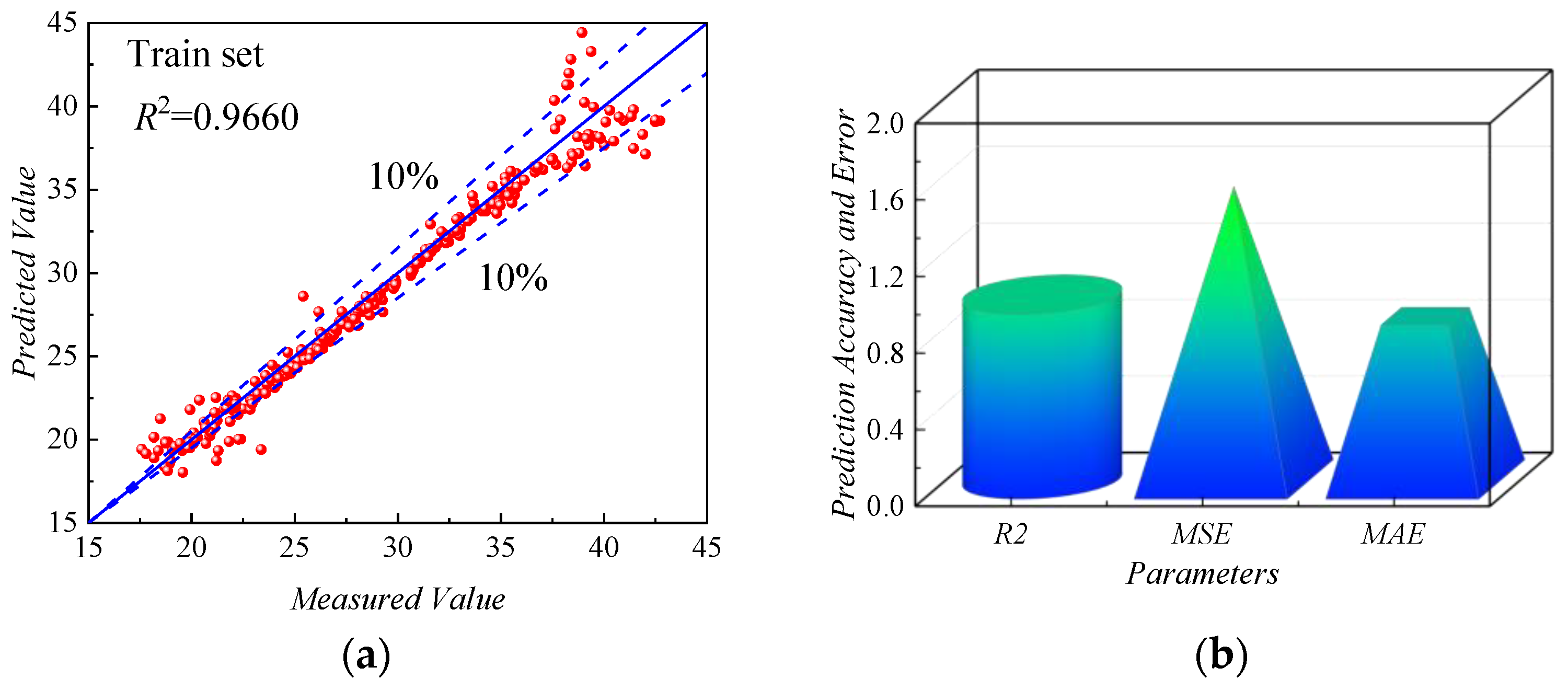
4.1. Establishment of ANN-PM Based on the Training Set
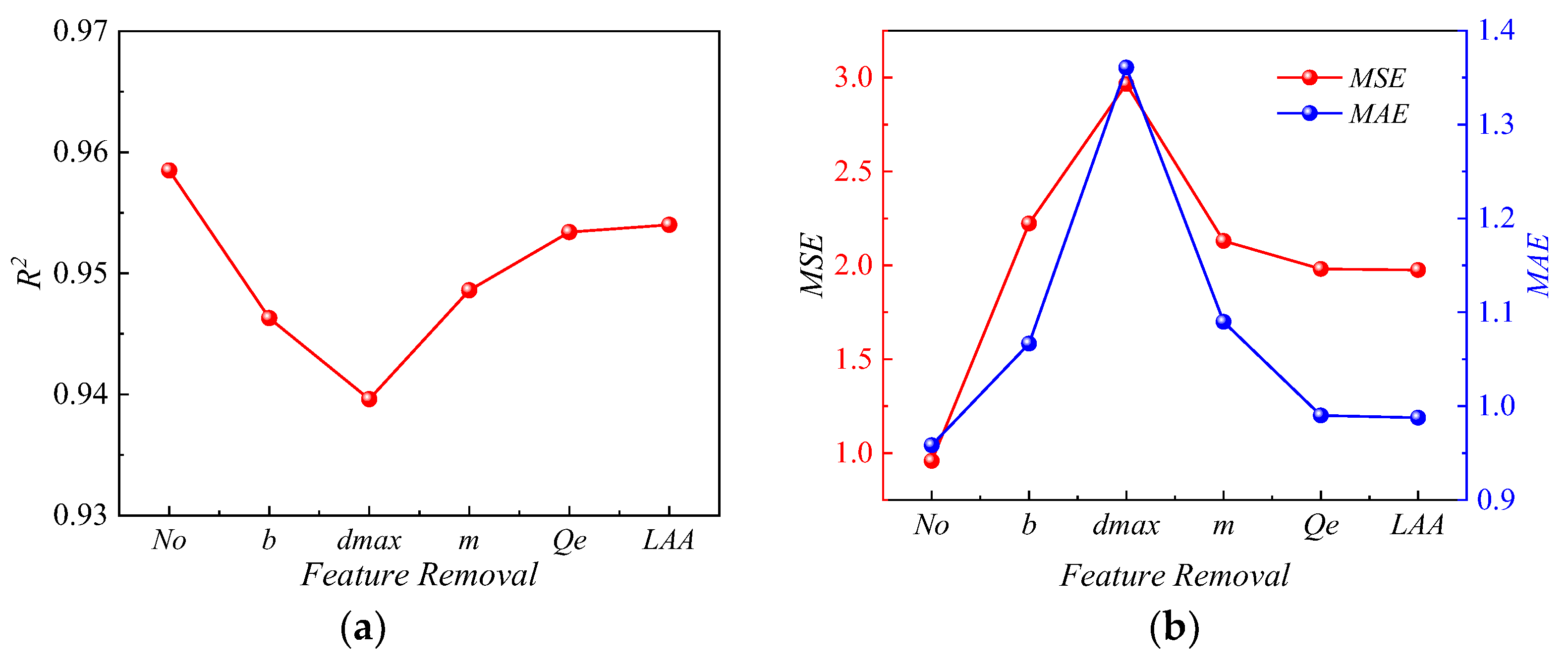
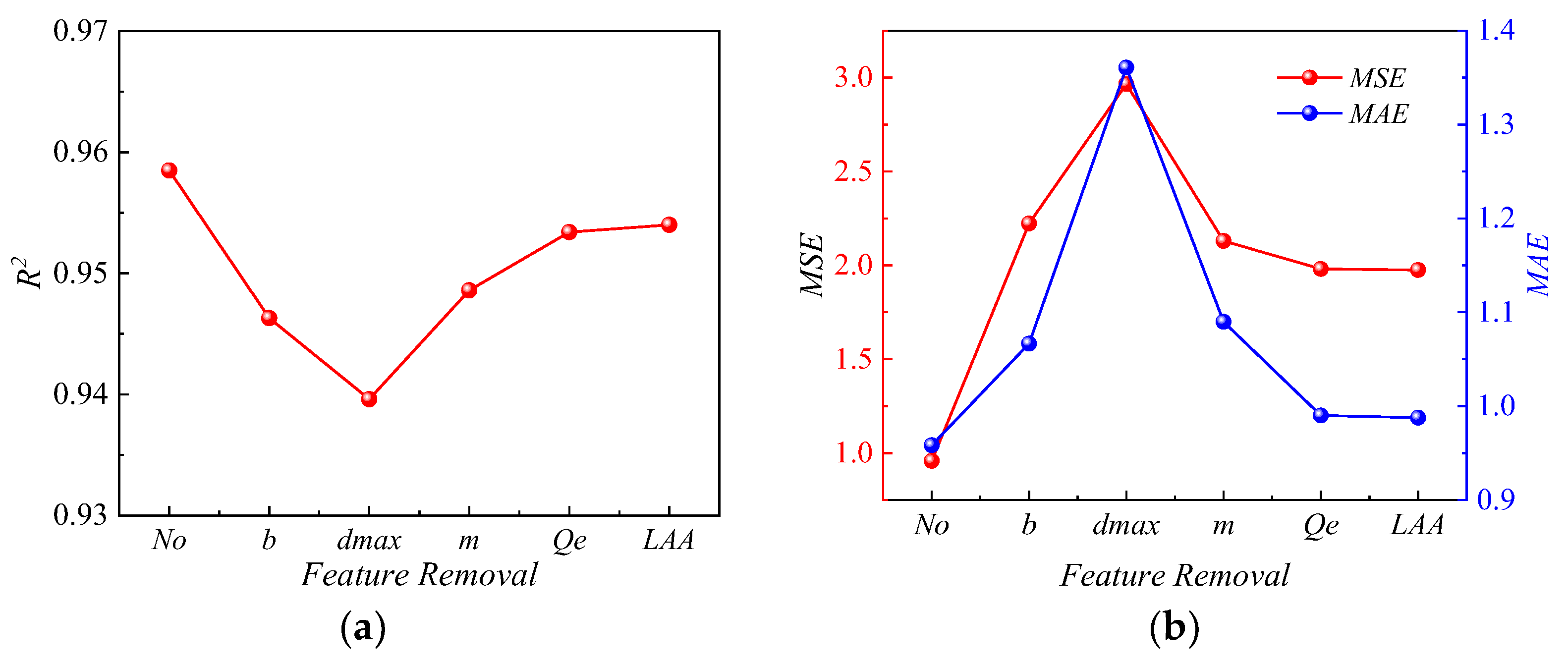
4.2. Evaluating the Impact of Key Features on the ANN-PM Performance
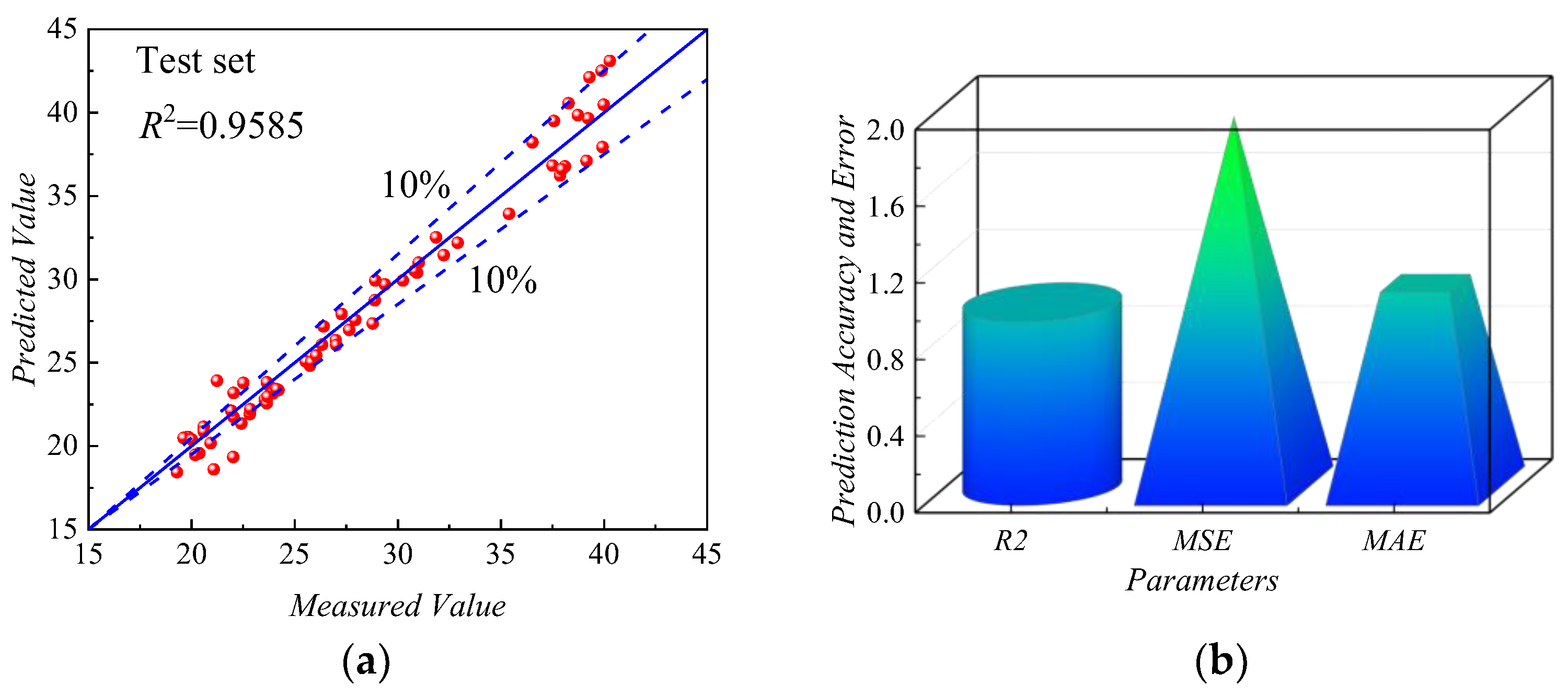
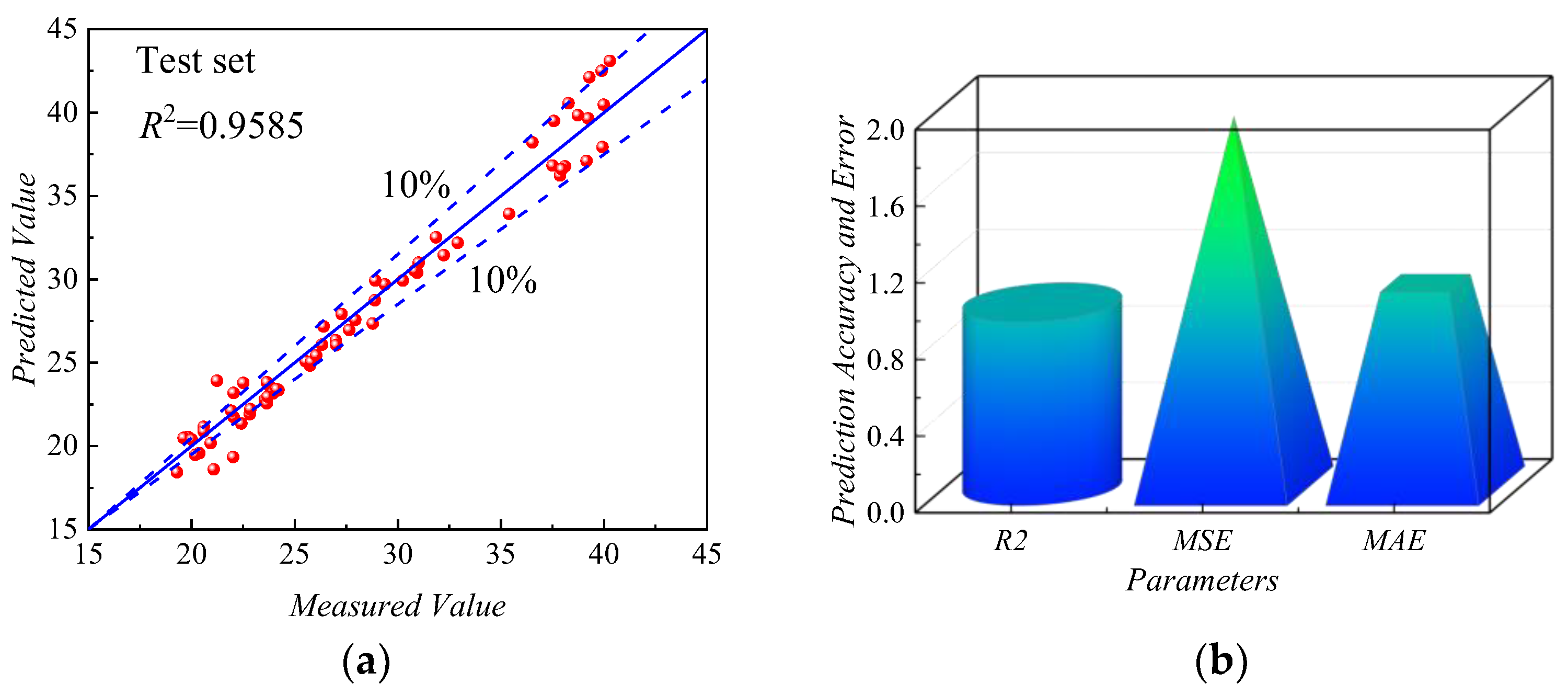
4.3. Evaluation of ANN-PM Based on the Testing Set
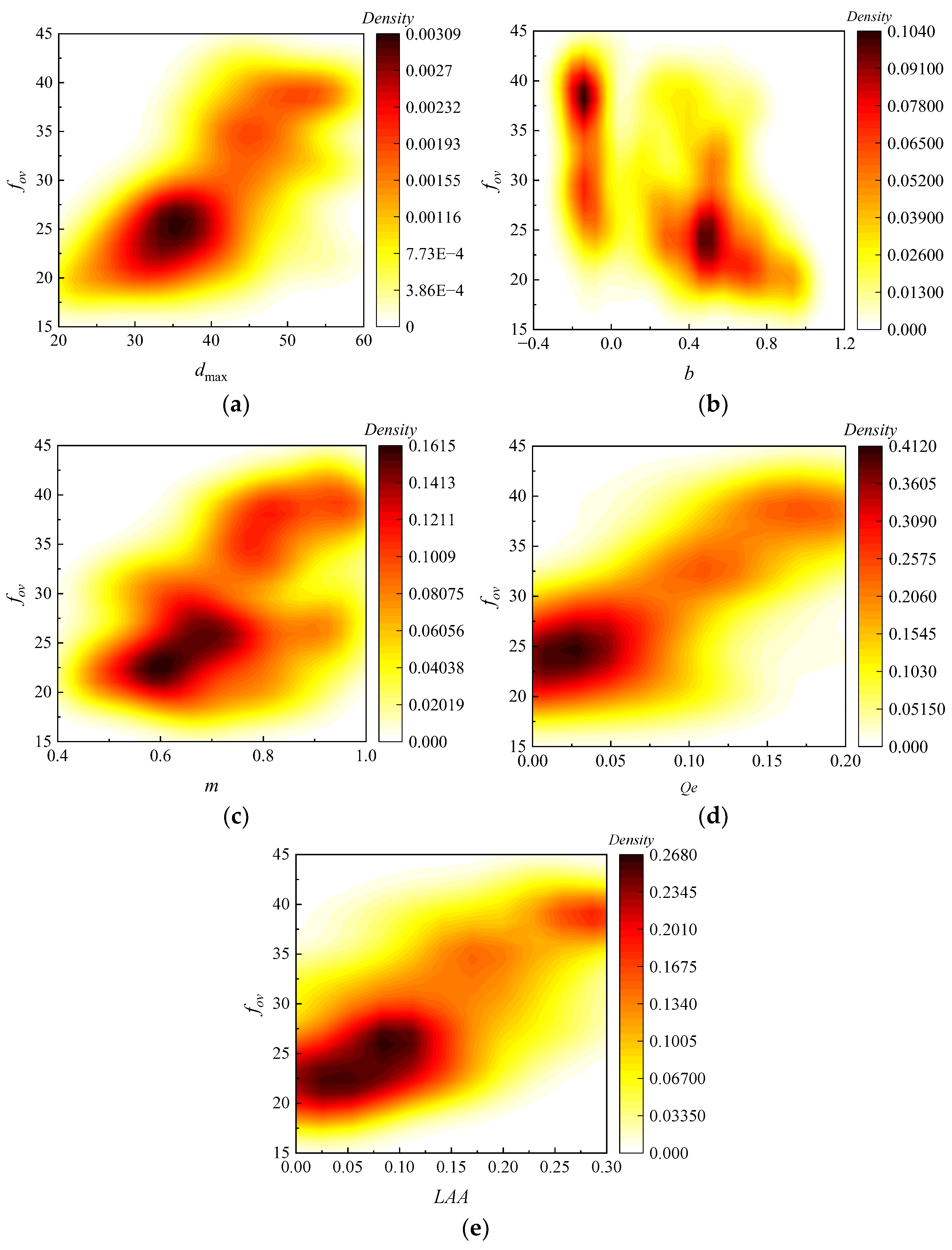
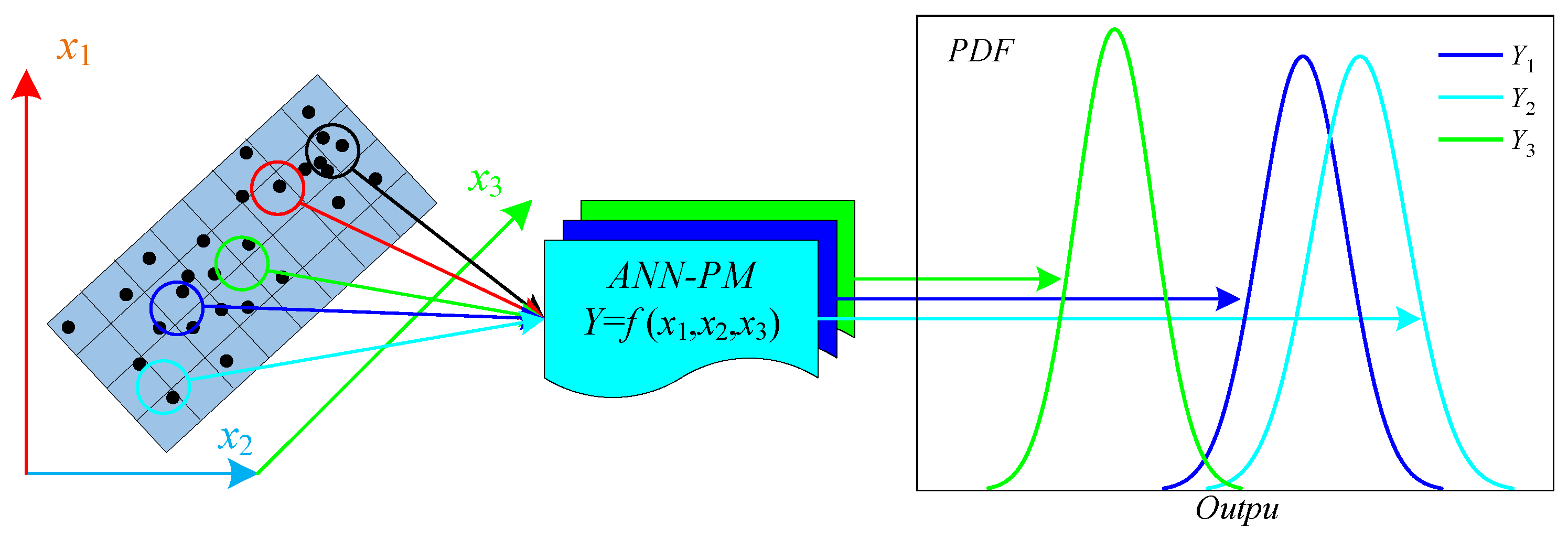
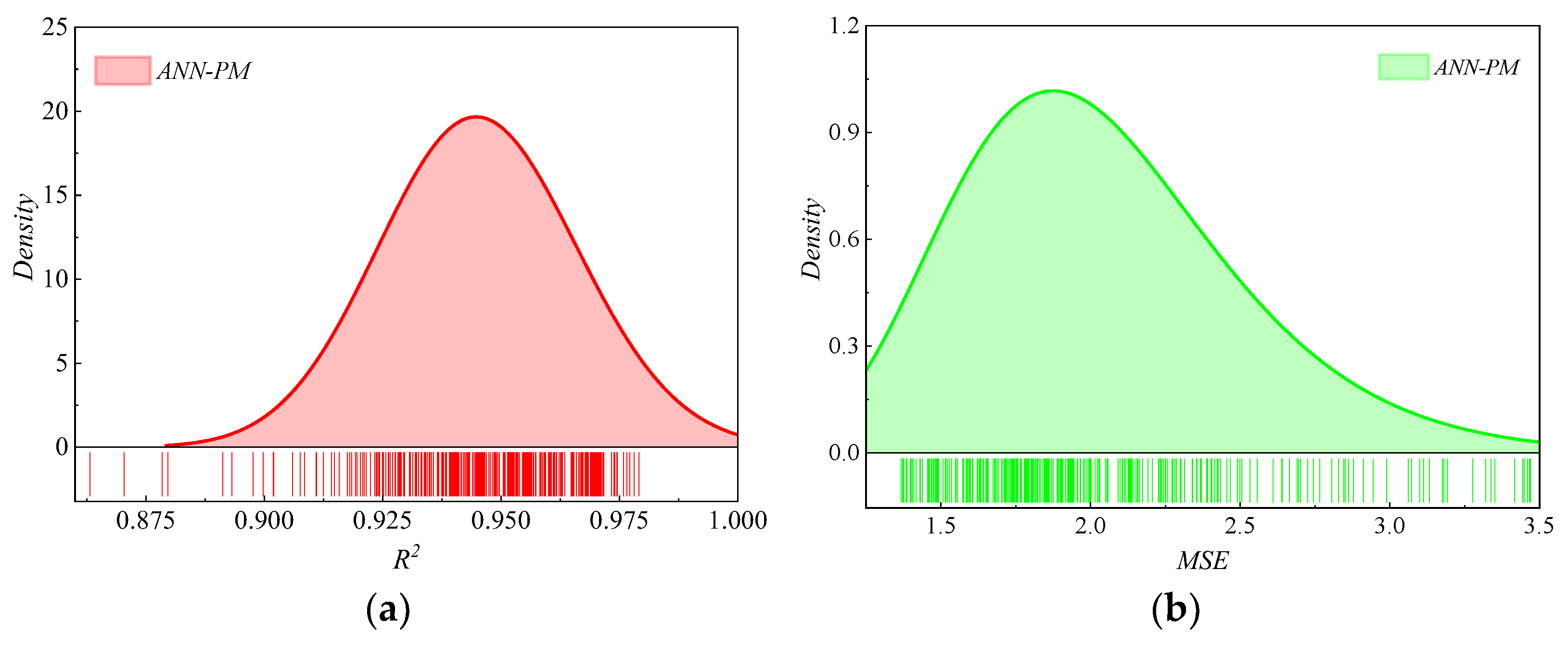
4.4. Sensitivity Analysis of ANN-PM
5. Discussion
6. Conclusions
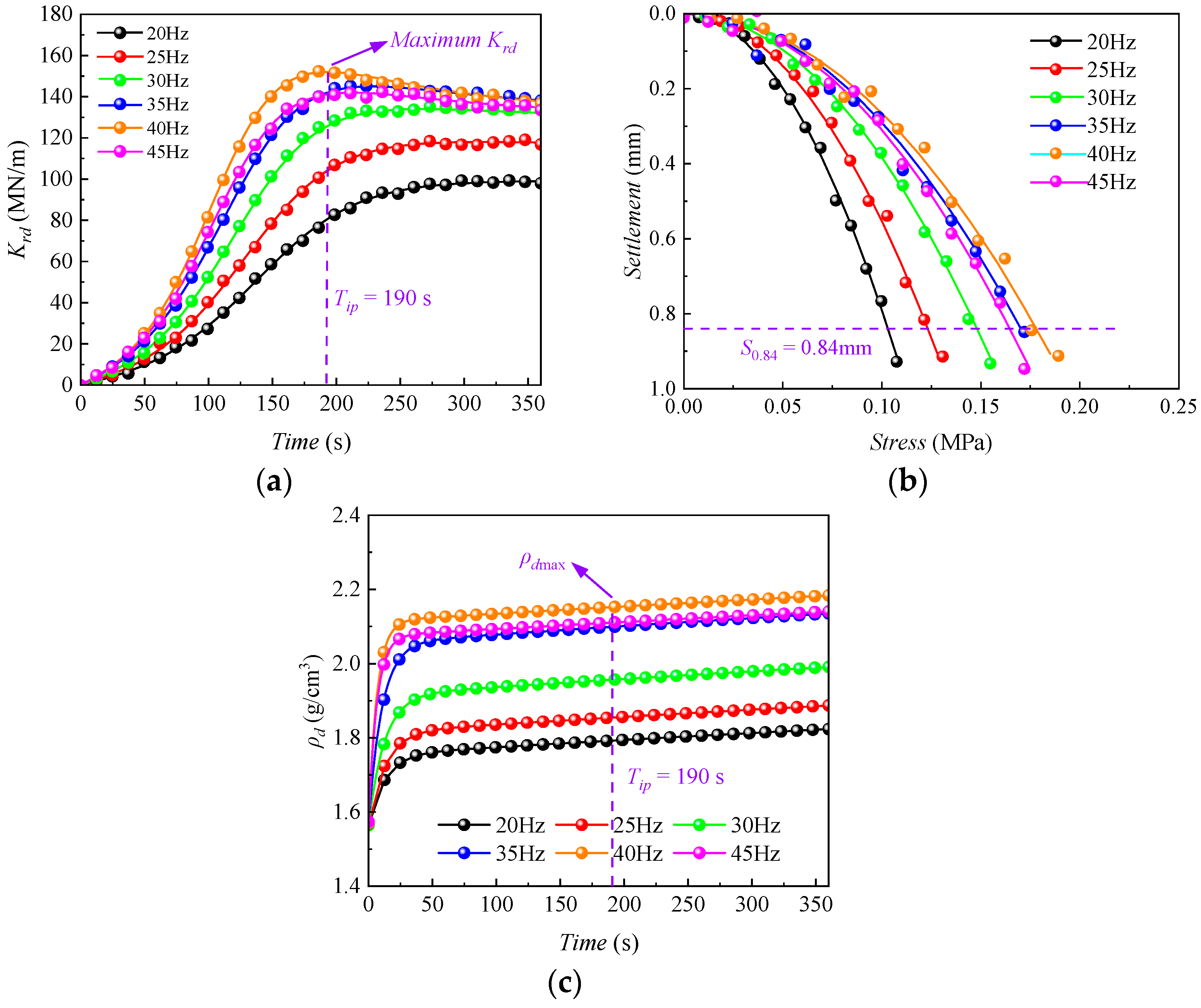
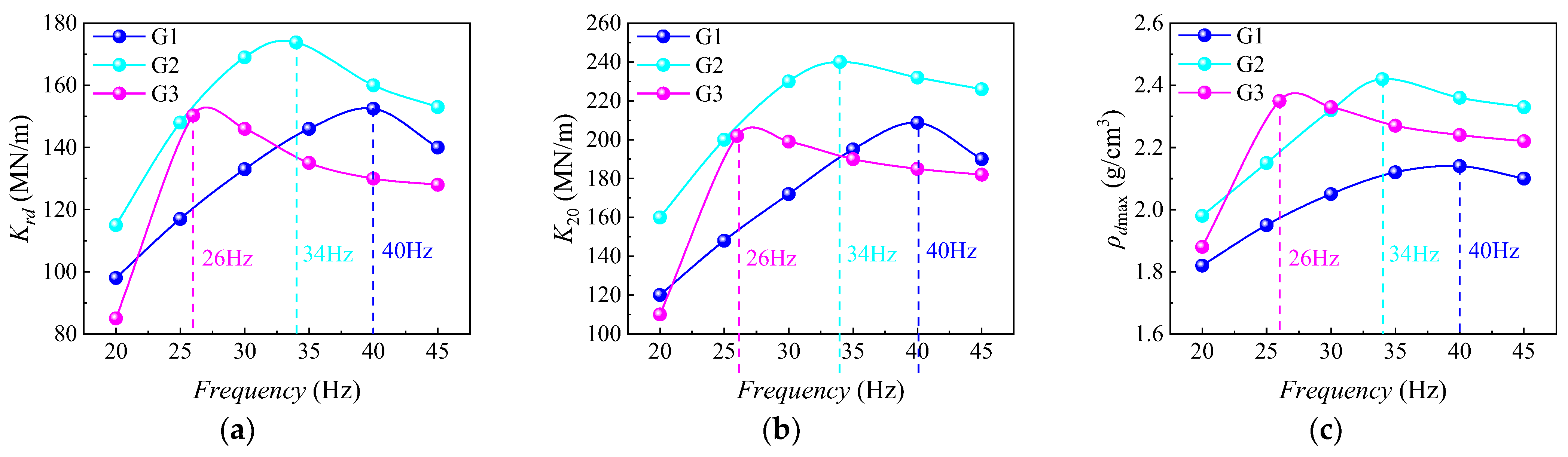
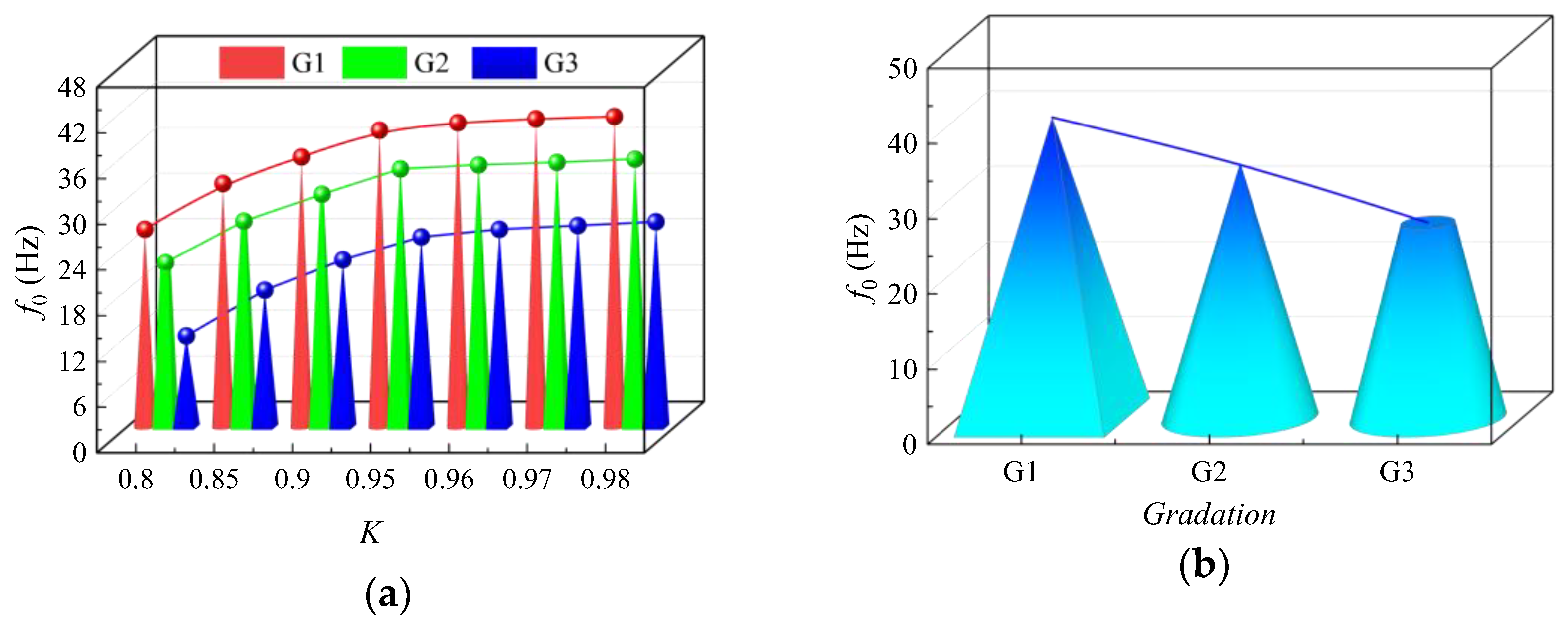
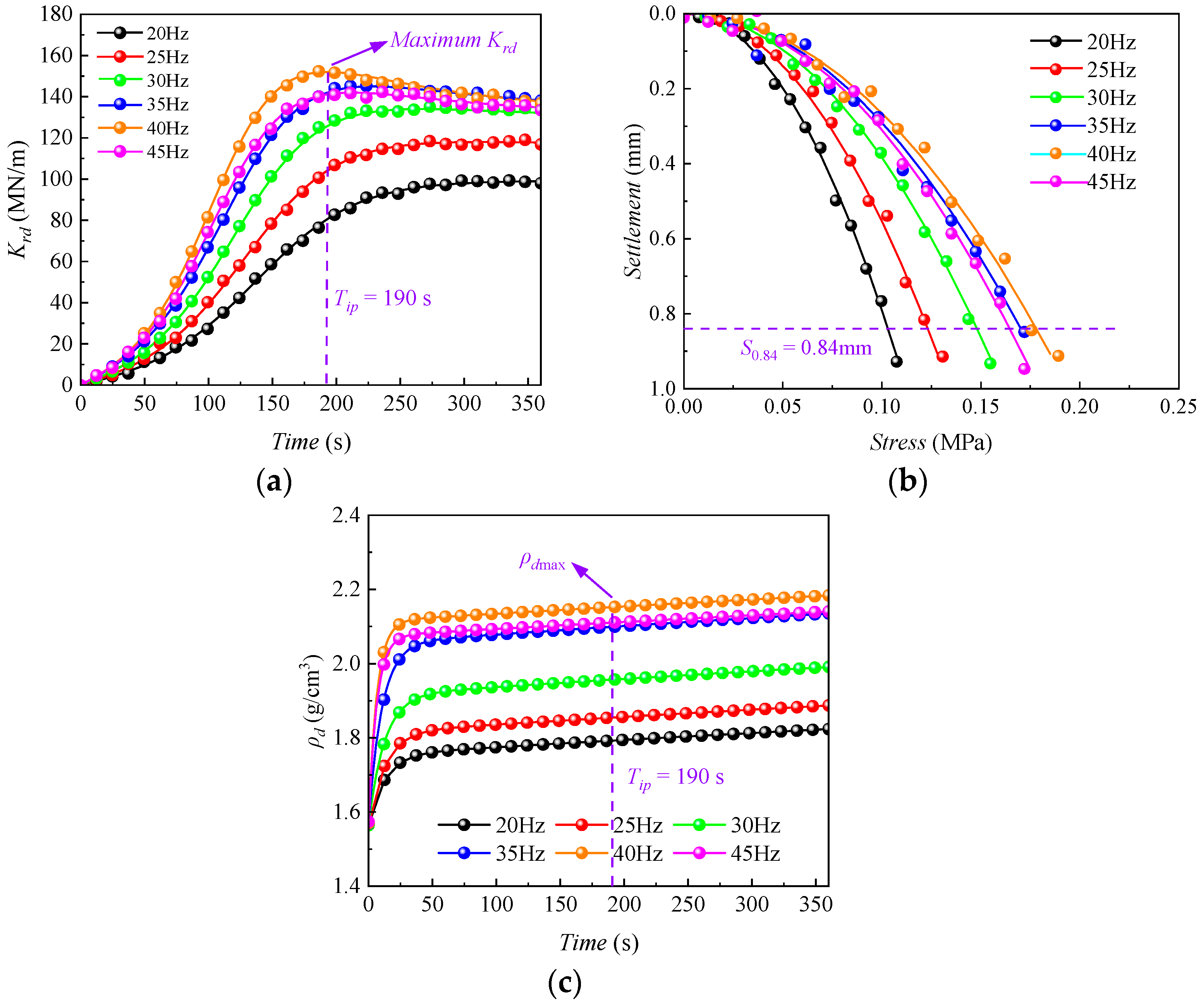
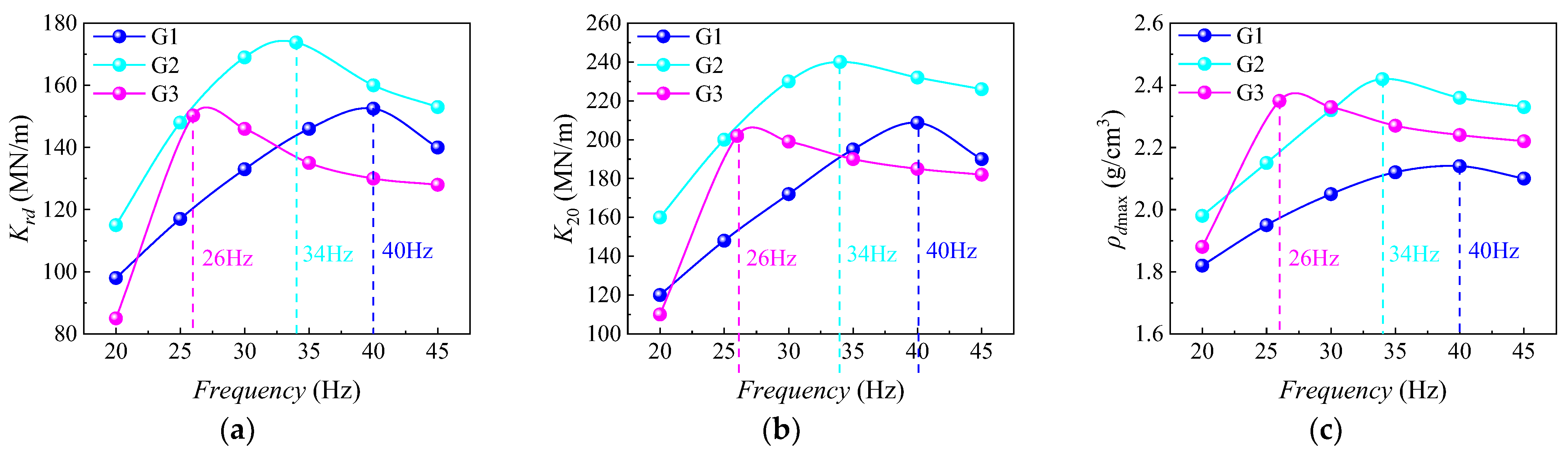
- In the vibratory compaction experiments, maximum dry density ρdmax, stiffness Krd, and bearing capacity coefficient K20 of different gradation HRGG fillers all obtained optimal states when the vibratory frequency was set as f0, which indicated that f0 was the fov.
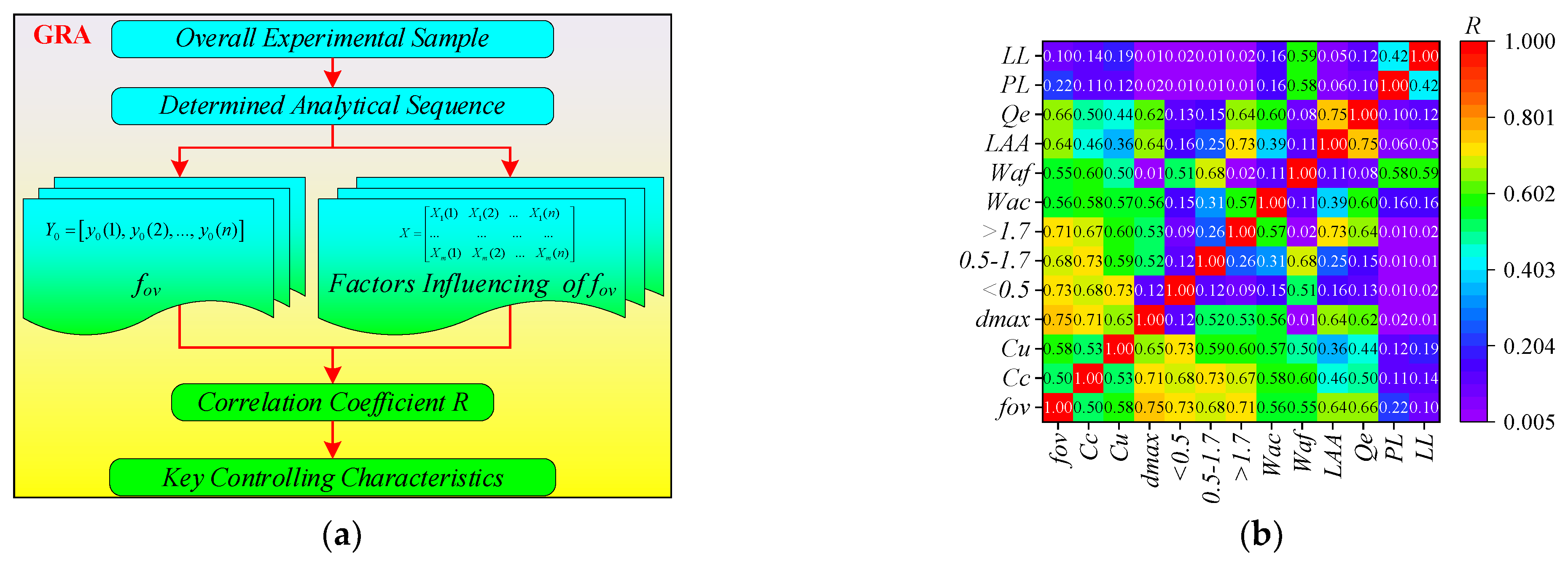
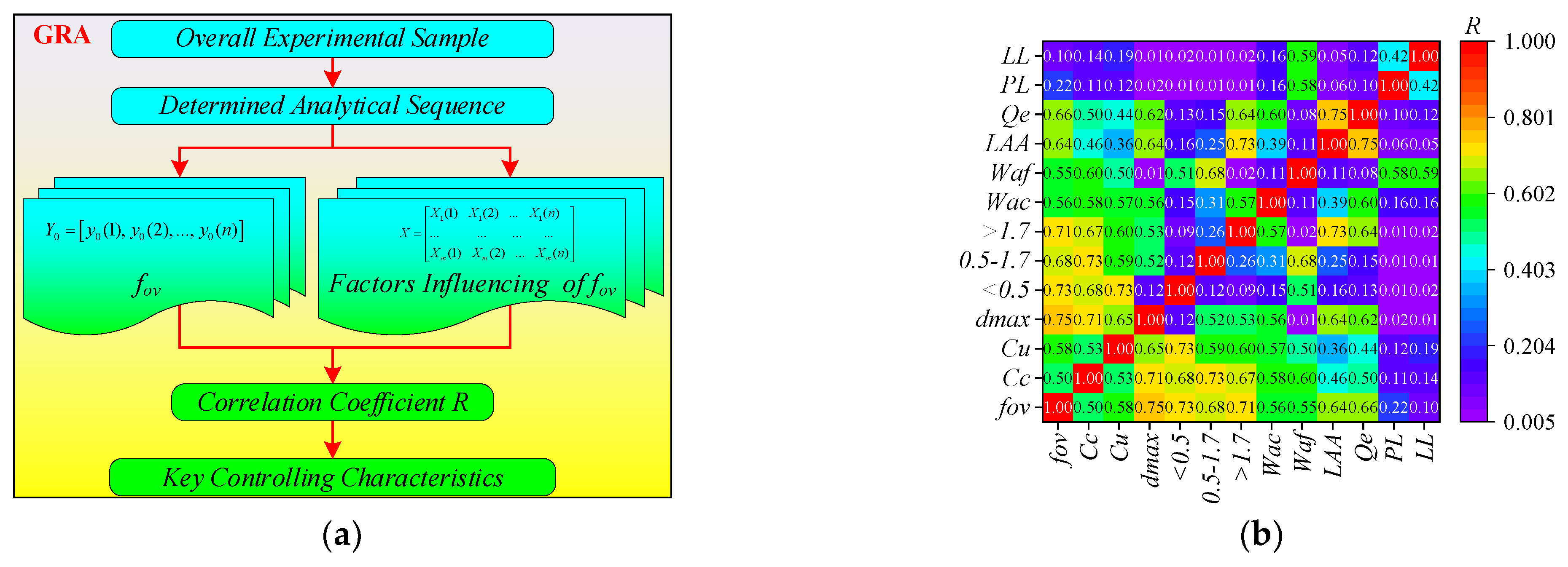
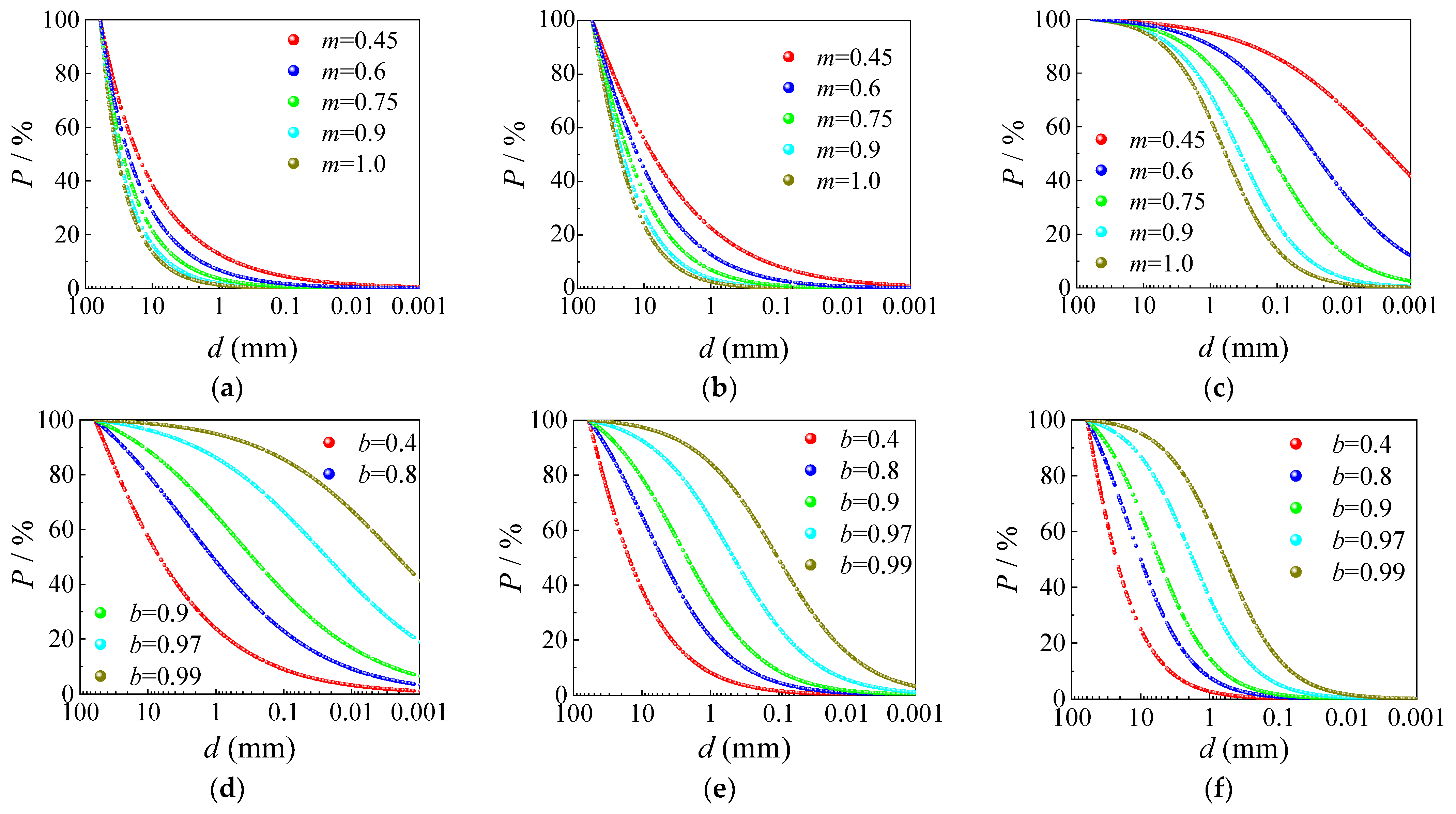
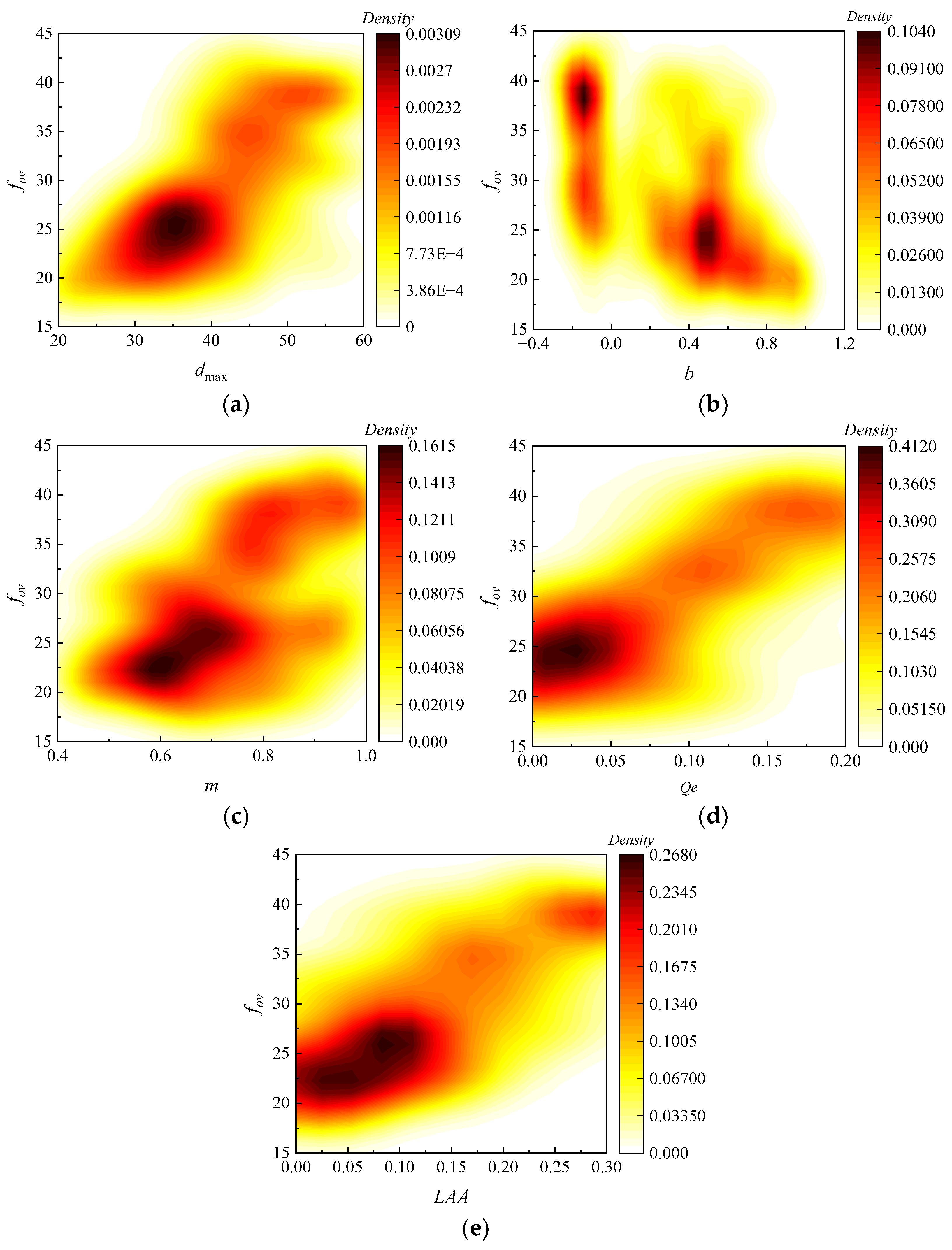
- Based on the gray relational analysis algorithm, the key features influencing the fov were determined to be the maximum particle diameter dmax, gradation parameters b and m, flat and elongated particles in coarse aggregate Qe, and the Los Angeles abrasion of coarse aggregate LAA.
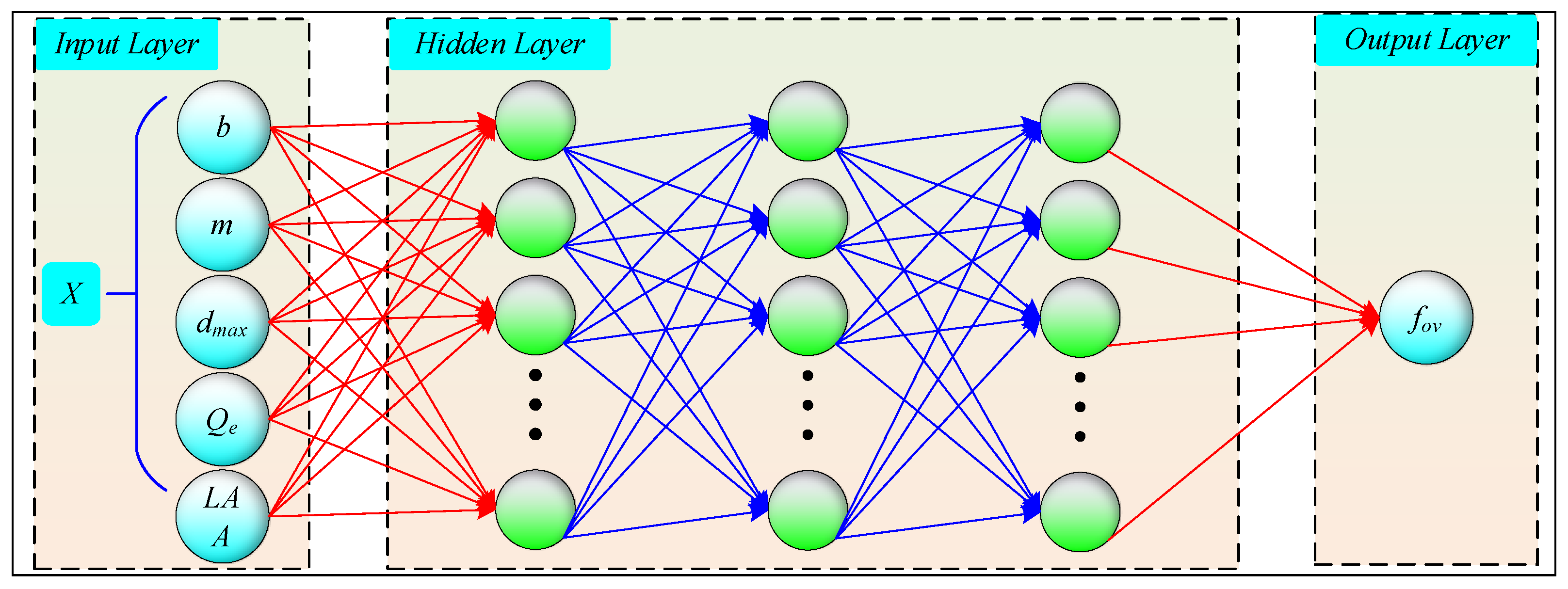
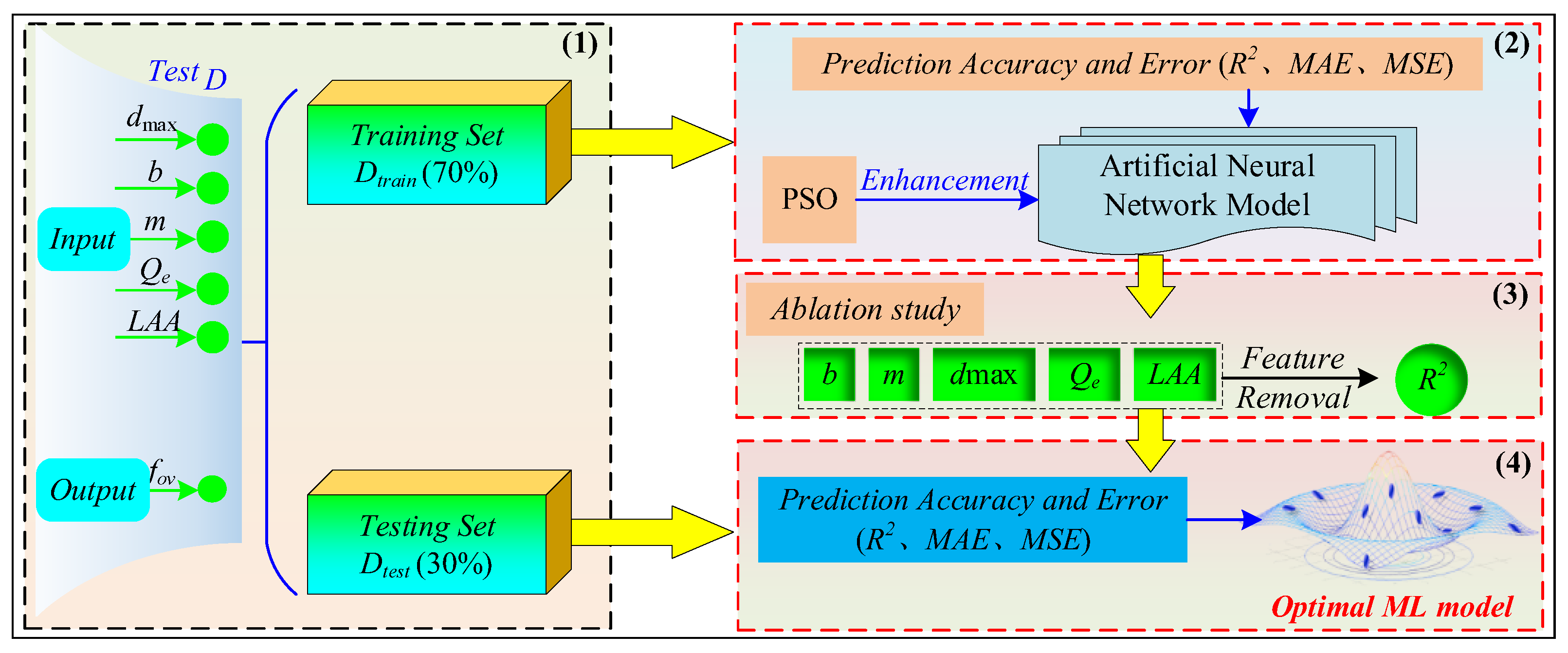
- The key feature influencing the fov was used to establish the ANN-PM. Then, based on the ablation study, it was indicated that the impact hierarchy of the five key features on the ANN-PM predictive performance was dmax > b > m > Qe > LAA.
- On the training and testing sets, the goodness-of-fit R2 of ANN-PM all exceeded 0.95, and the prediction errors were small, which indicated the strong prediction capability of ANN-PM for fov.
- Based on the sensitivity analysis, the distribution of R2 for the ANN-PM closely approached 1, with its mean value exceeding 0.9. In addition, the MSE distribution for the ANN-PM approached zero. It was clear that the ANN-PM exhibited excellent robust performance.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Qu, L.; Yang, C.; Ding, X.; Kouroussis, G.; Yuan, C. Vertical vibration of piles with a square cross-section. Int. J. Numer. Anal. Met. 2021, 45, 2629–2653. [Google Scholar] [CrossRef]
- Wan, Z.; Bian, X.; Li, S.; Chen, Y.; Cui, Y. Remediation of mud pumping in ballastless high-speed railway using polyurethane chemical injection. Constr. Build. Mater. 2020, 259, 120401. [Google Scholar] [CrossRef]
- Lian, J.; Ding, X.; Cai, D.; Yue, M. Intelligent adaptive control method for key parameters of vibration rolling during high-speed railway subgrade compaction. Transp. Geotech. 2023, 41, 101000. [Google Scholar] [CrossRef]
- Ye, Y.S.; Cai, D.G.; Zhang, Q.L.; Wei, S.W.; Yan, H.Y.; Geng, L. Review on vibration compaction theory and intelligent compaction technology of high-speed railway subgrade. China Railw. Sci. 2021, 42, 1–12. (In Chinese) [Google Scholar]
- Bian, X.; Li, W.; Qian, Y.; Tutumluer, E. Analysing the effect of principal stress rotation on railway track settlement by discrete element method. Géotechnique 2020, 70, 803–821. [Google Scholar] [CrossRef]
- Sadek, Y.; Rikioui, T.; Abdoun, T.; Dadi, A. Influence of Compaction Energy on Cement Stabilized Soil for Road Construction. Civil. Eng. 2022, 8, 580–594. [Google Scholar] [CrossRef]
- Xie, K.; Su, Q.; Chen, X.B.; Liu, B.; Wang, W.B.; Wang, X.; Deng, Z.X. Element model test on polyurethane crushed stone waterproof bonding layer of ballastless track. Rock Soil Mech. 2023, 44, 1–11. (In Chinese) [Google Scholar]
- Yang, C.W.; Zhang, L.; Su, K. Research on dynamic response of railway subgrade packing vibration compaction based on VMD-Hilbert transform. Chin. J. Rock Mech. Eng. 2022, 41 (Suppl. S1), 2991–3001. (In Chinese) [Google Scholar]
- Wang, M.; Yu, Q.D.; Xiao, Y.J.; Li, W.Q.; Hua, W.J.; Wang, X.M.; Chen, X.B. Experimental investigation of macro-and meso-scale compaction characteristics of unbound permeable base materials. Chin. J. Rock Mech. Eng. 2022, 41, 1701–1716. (In Chinese) [Google Scholar]
- Ji, X.; Lu, H.; Dai, C.; Ye, Y.; Cui, Z.; Xiong, Y. Characterization of Properties of Soil-Rock mixture prepared by the laboratory vibration compaction method. Sustainability 2021, 13, 11239. [Google Scholar] [CrossRef]
- Xie, K.; Li, T.-F.; Chen, X.-B.; Deng, Z.-X. A novel method for determining the particle breakage contribution of high-speed railway graded aggregate and its application in vibratory compaction. Case. Stud. Constr. Mat. 2023, 19, e02281. [Google Scholar] [CrossRef]
- Ye, Y.S.; Chen, X.B.; Hui, X.H.; Cai, D.G.; Yao, J.K.; Jin, L.X. Laboratory investigation on parameter optimization of vibrating compaction for high-speed railway’s group B. J. Railw. Sci. Eng. 2021, 18, 2497–2505. (In Chinese) [Google Scholar]
- Zhang, Q.; Liu, T.; Zhang, Z.; Huangfu, Z.; Li, Q.; An, Z. Compaction quality assessment of rockfill materials using roller-integrated acoustic wave detection technique. Automa. Constr. 2019, 97, 110–121. [Google Scholar] [CrossRef]
- Li, J.; Zhou, Z.L.; Li, Y. Test analysis of relationship between natural frequency and compaction degree for roadbed soil. Trans. Chin. Soc. Agric. Eng. 2012, 28, 71–76. (In Chinese) [Google Scholar]
- Xie, K.; Chen, X.B.; Yao, J.K.; Cai, D.G. Study on standardization method and application of vibration compaction test parameters of high-speed railway subgrade filler. Chin. J. Rock Mech. Eng. 2023, 42, 1799–1810. (In Chinese) [Google Scholar]
- Hu, W.; Polaczyk, P.; Jia, X.; Gong, H.; Huang, B. Visualization and quantification of lab vibratory compacting process for aggregate base materials using accelerometer. Transp. Geotech. 2020, 25, 100393. [Google Scholar] [CrossRef]
- Liu, J.; Yang, X. Learning to See the Vibration: A Neural Network for Vibration Frequency Prediction. Sensors 2018, 18, 2530. [Google Scholar] [CrossRef] [PubMed]
- Quan, T.V.; Quoc, D.V.; Si, H.L. Evaluating compressive strength of concrete made with recycled concrete aggregates using machine learning approach. Constr. Build. Mater. 2022, 323, 126578. [Google Scholar] [CrossRef]
- Isik, F.; Ozden, G. Estimating compaction parameters of fine- and coarse-grained soils by means of artificial neural networks. Environ. Earth. Sci. 2013, 69, 2287–2297. [Google Scholar] [CrossRef]
- Zaman, M.; Solanki, P.; Ebrahimi, A.; White, L. Neural network modeling of resilient modulus using routine subgrade soil properties. Int. J. Geomech. 2010, 10, 1–12. [Google Scholar] [CrossRef]
- Xie, K.; Chen, X.-B.; Li, T.-F.; Deng, Z.-X.; Yao, J.-K.; Tang, L.-B. A framework for determining the optimal moisture content of high-speed railway-graded aggregate materials based on the lab vibration compaction method. Constr. Build. Mater. 2023, 392, 131764. [Google Scholar] [CrossRef]
- Jayan, J.; Sankar, N. Prediction of compaction parameters of soils using artificial neural network. Asian J. Eng. Technol. 2015, 3, 2321–2462. [Google Scholar]
- Kolakoti, A.; Prasadarao, B.; Satyanarayana, K.; Setiyo, M.; Köten, H.; Raghu, M. Elemental, Thermal and physicochemical investigation of novel biodiesel from wodyetia bifurcata and its properties optimization using artificial neural network (ANN). Automot. Exp. 2022, 5, 2615–6636. [Google Scholar] [CrossRef]
- TB10001-2016; Code for Design of Railway Earth Structure. Ministry of the Railway: Beijing, China, 2016. (In Chinese)
- Xie, K.; Chen, X.B.; Yao, J.K.; Li, T.F.; Wang, Y.S.; Deng, Z.X.; Lv, X.L. Study on the Vibration Compaction Mechanism with High-Speed Railway Fillers Based on the Dynamic Evolution of Coarse Particles. Chin. J. Geotech. Eng. 1–10. Available online: http://kns.cnki.net/kcms/detail/32.1124.tu.20230818.1510.002.html (accessed on 21 August 2023). (In Chinese).
- Chen, X.L.; Wang, Y.H.; Wang, C.H. Modal analysis and experiment research on natural frequencies of transition section subgrade of high-speed railway. J. Cent. South Univ. (Sci. Technol.) 2012, 43, 322–327. (In Chinese) [Google Scholar]
- TB/T 2140-2008; Railway Ballast. China Railway Publishing House: Beijing, China, 2008.
- TB 10102-2023; Geotechnical Testing Procedures for Railway Engineering. China Railway Publishing House: Beijing, China, 2023.
- Fan, Y.B.; Liu, C.; Wang, J.B. Prediction algorithm for springback of frame-rib parts in rubber forming process by incorporating Sobol within improved grey relation analysis. J. Mater. Res. Technol. 2021, 13, 1955–1966. [Google Scholar] [CrossRef]
- Wu, E.-L.; Zhu, J.-G.; Chen, G.; Wang, L. Experimental study of effect of gradation on compaction properties of rockfill materials. Bull. Eng. Geol. Environ. 2020, 79, 2863–2869. [Google Scholar] [CrossRef]
- Armaghani, D.J.; Asteris, P.G. A comparative study of ANN and ANFIS models for the prediction of cement-based mortar materials compressive strength. Neural. Comput. Appl. 2021, 33, 4501–4532. Available online: https://link.springer.com/article/10.1007/s00521-020-05244-4 (accessed on 24 July 2020).
- Jalal, M.; Grasley, Z.; Gurganus, C.; Bullard, J.W. A new nonlinear formulation-based prediction approach using artificial neural network (ANN) model for rubberized cement composite. Eng. Comput. 2022, 38, 283–300. Available online: https://link.springer.com/article/10.1007/s00366-020-01054-3 (accessed on 15 May 2020).
- Escribano, Á.; Wang, D. Mixed random forest, cointegration, and forecasting gasoline prices. Int. J. Forecast. 2021, 37, 1442–1462. [Google Scholar] [CrossRef]
- Han, H.; Shi, B.; Zhang, L. Prediction of landslide sharp increase displacement by SVM with considering hysteresis of groundwater change. Eng. Geol. 2021, 280, 105876. [Google Scholar] [CrossRef]
- Latif, S.D. Developing a boosted decision tree regression prediction model as a sustainable tool for compressive strength of environmentally friendly concrete. Environ. Sci. Pollut. Res. 2021, 28, 65935–65944. Available online: https://link.springer.com/article/10.1007/s11356-021-15662-z (accessed on 22 July 2021).
- Ren, X.; Yang, B.; Luo, N.; Li, J.; Li, Y.; Xue, T.; Yang, A. The Prediction of Sinter Drums Strength Using Hybrid Machine Learning Algorithms. Comput. Intell. Neurosci. 2022, 2022, 4790736. [Google Scholar] [CrossRef] [PubMed]
- Fareeha, A.; Chen, W.X. Investigation of steam ejector parameters under three optimization algorithm using ANN. Appl. Therm. Eng. 2023, 225, 120205. [Google Scholar] [CrossRef]
- Hu, R.; Monebhurrun, V.; Himeno, R.; Yokota, H.; Costen, F. A General Framework for Building Surrogate Models for Uncertainty Quantification in Computational Electromagnetics. IEEE Trans. Antennas Propag. 2022, 70, 1402–1414. [Google Scholar] [CrossRef]
- Song, M.; Ge, Y.H.; Liu, J.S. Improved Dynamic Dual Adaptive PSO Algorithm Based on Theory of Co-evolution. Comput. Eng. Appl. 2020, 56, 54–62. (In Chinese) [Google Scholar]
- Deng, Z.-X.; Xie, K.; Su, Q.; Xu, L.-R.; Hao, Z.-R.; Xiao, X.-P. Three-level evaluation method of cumulative slope deformation hybrid machine learning models and interpretability analysis. Constr. Build. Mater. 2023, 408, 133821. [Google Scholar] [CrossRef]
- Ghannadi, P.; Kourehli, S.S.; Mirjalili, S. The Application of PSO in Structural Damage Detection: An Analysis of the Previously Released Publications (2005–2020). Frat. Ed Integrità Strutt. 2022, 16, 460–489. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhu, Z.; Yao, W.; Wang, Z.; Wang, C.; Wei, Y.; Wei, Z.; Guan, X. Accurate prediction of concrete compressive strength based on explainable features using deep learning. Constr. Build. Mater. 2022, 329, 127082. [Google Scholar] [CrossRef]
- Cheng, Y.; Zhou, W.H.; Xu, T. Tunneling-induced settlement prediction using the hybrid feature selection method for feature optimization. Transp. Geotech. 2022, 36, 100808. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, H.-N.; Chen, R.-P.; Chan, T.H. Hybrid meta-heuristic and machine learning algorithms for tunneling-induced settlement prediction: A comparative study. Tunn. Undergr. Space. Technol. 2020, 99, 103383. [Google Scholar] [CrossRef]
- Younas, J.; Malik, M.I.; Ahmed, S.; Shafait, F.; Lukowicz, P. Sense the pen: Classification of online handwritten sequences (text, mathematical expression, plot/graph). Expert. Syst. Appl. 2021, 15, 114588. [Google Scholar] [CrossRef]
- Zhang, Y.G.; Zhao, Y.P.; Shen, X.Y.; Zhang, J. A comprehensive wind speed prediction system based on Monte Carlo and artificial intelligence algorithms. Appl. Energ. 2022, 305, 117815. [Google Scholar] [CrossRef]
- Zhao, X.; Ge, C.; Ji, F.; Liu, Y. Monte Carlo Method and Quantile Regression for Uncertainty Analysis of Wind Power Forecasting Based on Chaos-LS-SVM. Int. J. Control Autom. 2021, 19, 3731–3740. [Google Scholar] [CrossRef]
- Zheng, W.H. A novel method for dry density forecasting of high-speed railway graded aggregate fillers based on the PSO-ANN model. Results Eng. 2023, 19, 101361. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gradation | f (Hz) | ω (%) | mp (kg) | re (mm) | me (kg) | Dc (mm) | h0 (mm) |
|---|---|---|---|---|---|---|---|
| G1 | 40 | 3.6 | 600 | 18.0 | 4.7 | 200 | 155 |
| G2 | 34 | 4.0 | 600 | 25.1 | 4.7 | 200 | 155 |
| G3 | 26 | 5.4 | 600 | 44.4 | 4.7 | 200 | 155 |
| Performance feature | Cu | Cc | dmax | d ≤ 0.5 | d = 0.5~1.7 | d ≥ 1.7 | LAA | Qe | Wac | Waf | LL | PL |
| Correlation coefficient R | 0.58 | 0.5 | 0.75 | 0.73 | 0.68 | 0.71 | 0.64 | 0.66 | 0.56 | 0.55 | 0.1 | 0.22 |
| Hyperparameters | α | Neurons1 | Neurons2 | Epoch | Batch Size |
|---|---|---|---|---|---|
| ANN | 0.001 | 100 | 100 | 200 | 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiao, X.; Li, T.; Lin, F.; Li, X.; Hao, Z.; Li, J. A Framework for Determining the Optimal Vibratory Frequency of Graded Gravel Fillers Using Hammering Modal Approach and ANN. Sensors 2024, 24, 689. https://doi.org/10.3390/s24020689
Xiao X, Li T, Lin F, Li X, Hao Z, Li J. A Framework for Determining the Optimal Vibratory Frequency of Graded Gravel Fillers Using Hammering Modal Approach and ANN. Sensors. 2024; 24(2):689. https://doi.org/10.3390/s24020689
Chicago/Turabian StyleXiao, Xianpu, Taifeng Li, Feng Lin, Xinzhi Li, Zherui Hao, and Jiashen Li. 2024. "A Framework for Determining the Optimal Vibratory Frequency of Graded Gravel Fillers Using Hammering Modal Approach and ANN" Sensors 24, no. 2: 689. https://doi.org/10.3390/s24020689
APA StyleXiao, X., Li, T., Lin, F., Li, X., Hao, Z., & Li, J. (2024). A Framework for Determining the Optimal Vibratory Frequency of Graded Gravel Fillers Using Hammering Modal Approach and ANN. Sensors, 24(2), 689. https://doi.org/10.3390/s24020689