
Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks

Abstract
1. Introduction
- A cluster number optimization method based on the underwater energy propagation model is proposed to minimize the transmission energy consumption of the network.
- A parallel data transmission method based on scheduling for the cluster head nodes and sensor nodes is proposed to achieve conflict-free parallel data transmission.
- Replication computing is introduced to the LEACH protocol to reduce the signaling in the clustering and transmission phases.
2. Related Work
3. Improved LEACH Protocol
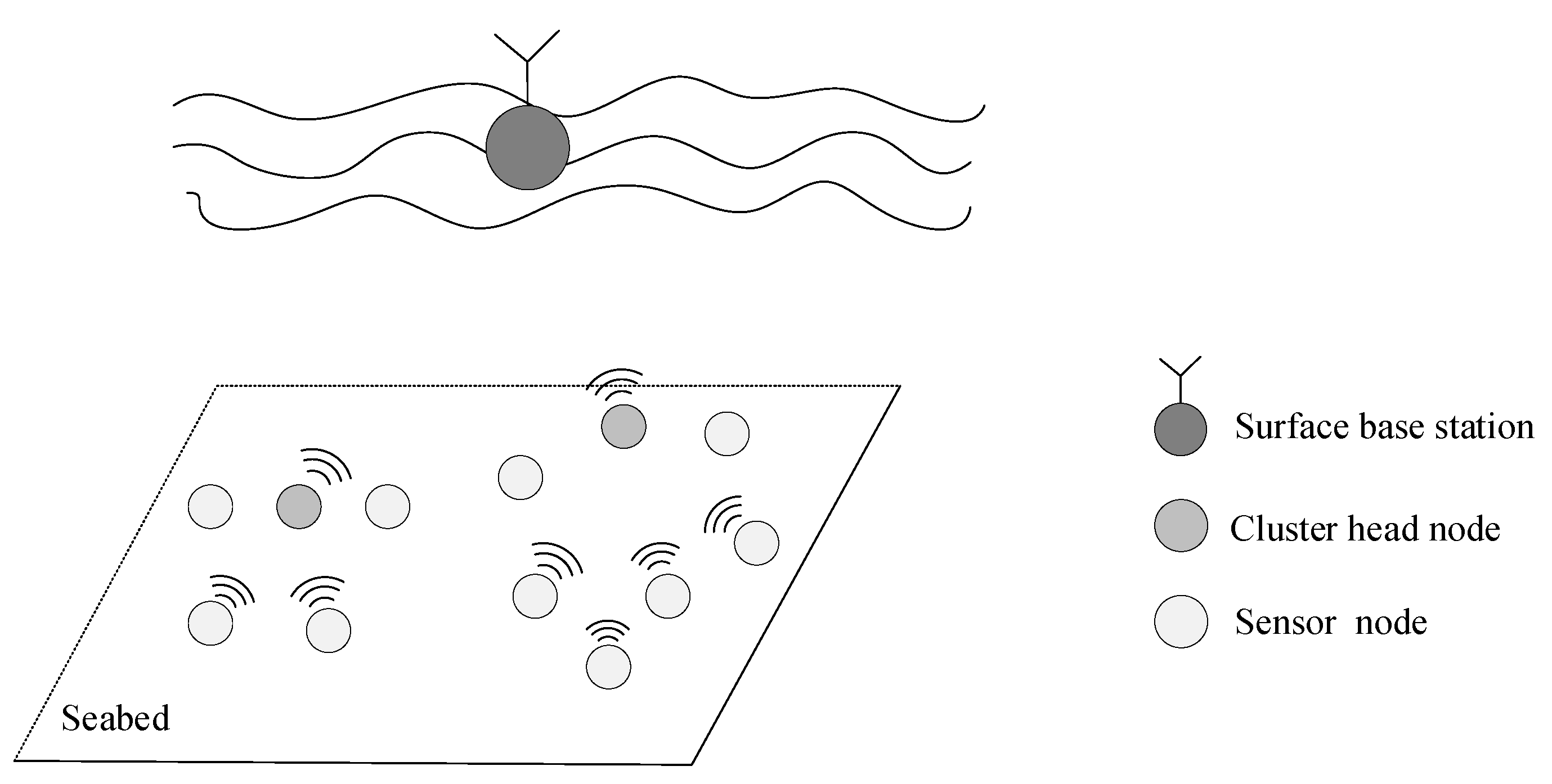
3.1. Network Model
- (1)
- All nodes in the network are stationary and uniformly distributed.
- (2)
- All nodes are designed with a homogeneous architecture, allowing each node to function interchangeably as either a sensor node or a cluster head node.
- (3)
- All nodes know the positions and initial energy of other nodes before communication.
- (4)
- The network is partly connected, but all nodes in a cluster can communicate with each other in a half-duplex mode.
- (5)
- All node clocks in the network are synchronized.
- (6)
- During idle periods when there is no communication task, nodes in the network periodically synchronize their residual energy and other information.
3.2. Clustering Based on Underwater Energy Propagation Model
3.2.1. Optimization of the Cluster Number
3.2.2. Improved Clustering Algorithm
| Algorithm 1: Improved clustering algorithm |
| 1: Initialize the number and location distribution of nodes; |
| 2: Initialize the residual energy of each node and the set of cluster head nodes as empty; |
| 3: Compute the network optimum cluster number ; |
| 4: Each node obtains the minimum value of residual energy of cluster head nodes; |
| 5: for each iteration number do |
| 6: Clear the set ; |
| 7: for each node do |
| 8: if then |
| 9: Include node in for this round. |
| 10: end if |
| 11: end for |
| 12: Cluster nodes into clusters with the K-means algorithm; nodes in are used as cluster head nodes; |
| 13: Each node obtains the minimum value of residual energy of cluster head nodes; |
| 14: end for |
3.3. Parallel Transmission Based on Scheduling for Cluster Head Nodes and Sensor Nodes
3.3.1. Scheduling for Cluster Head Nodes
3.3.2. Scheduling for Sensor Nodes
- Schedule the transmission times of all sensor nodes in the first cluster.
- Find out the nodes in the ith cluster that will interfere with the reception of the first to the (i − 1)th cluster head nodes and the nodes in the first to the (i − 1)th clusters that will interfere with the reception of the ith cluster head node according to their locations.
- Obtain the transmission schedules of the first to the (i − 1)th clusters.
- For the jth node in the ith cluster, calculate its transmission time that does not cause conflicts at the ith and the scheduled adjacent cluster head nodes while minimizing the total transmission time.
- Repeat step 4 until all the transmission times of the nodes in the ith cluster are scheduled. Then, schedule the transmission time of the next cluster.
- Repeat steps 2~5 until all the nodes in the network are scheduled.
3.4. LEACH Protocol Based on Replication Computing
3.4.1. Principle of Replication Computing
3.4.2. Protocol Implementation
- (1)
- The inputs of the operation are variable.
- (2)
- Multiple nodes must know the operation results.
- (3)
- The operation is deterministic.
- Initialize a table in each node that contains information about the location, initial energy, and schedule order of all nodes in the network.
- Activate the network by transitioning from standby to active mode for the communication task. Each node updates the residual energies of all nodes in the network according to the following formula:where is the updated residual energy of the ith node, is the initial residual energy, and is the energy consumption during the standby mode.
- Each node independently computes a consistent network clustering result using the proposed clustering algorithm through replication computing.
- Each node establishes an identical packet scheduling table using the proposed scheduling algorithm through replication computing.
- Sensor nodes and cluster head nodes send packets at predetermined times.
- Each node updates the residual energies of all nodes in the network through replication computing. The energy update process differs between sensor nodes and cluster head nodes as follows:For sensor nodes:where is the updated residual energy of the ith sensor node, is its initial residual energy, and is the energy consumed by the ith sensor node during transmission.For cluster head nodes:where is the updated residual energy of the ith cluster head node, is its initial residual energy, is the energy consumed by the ith cluster head node during transmission, and is the energy consumed by the ith cluster head node during data reception.
- Continue with the next round of communication or enter standby mode.
4. Simulations and Results
4.1. Simulation Setup
4.2. Simulation Metrics
4.3. Simulation Results
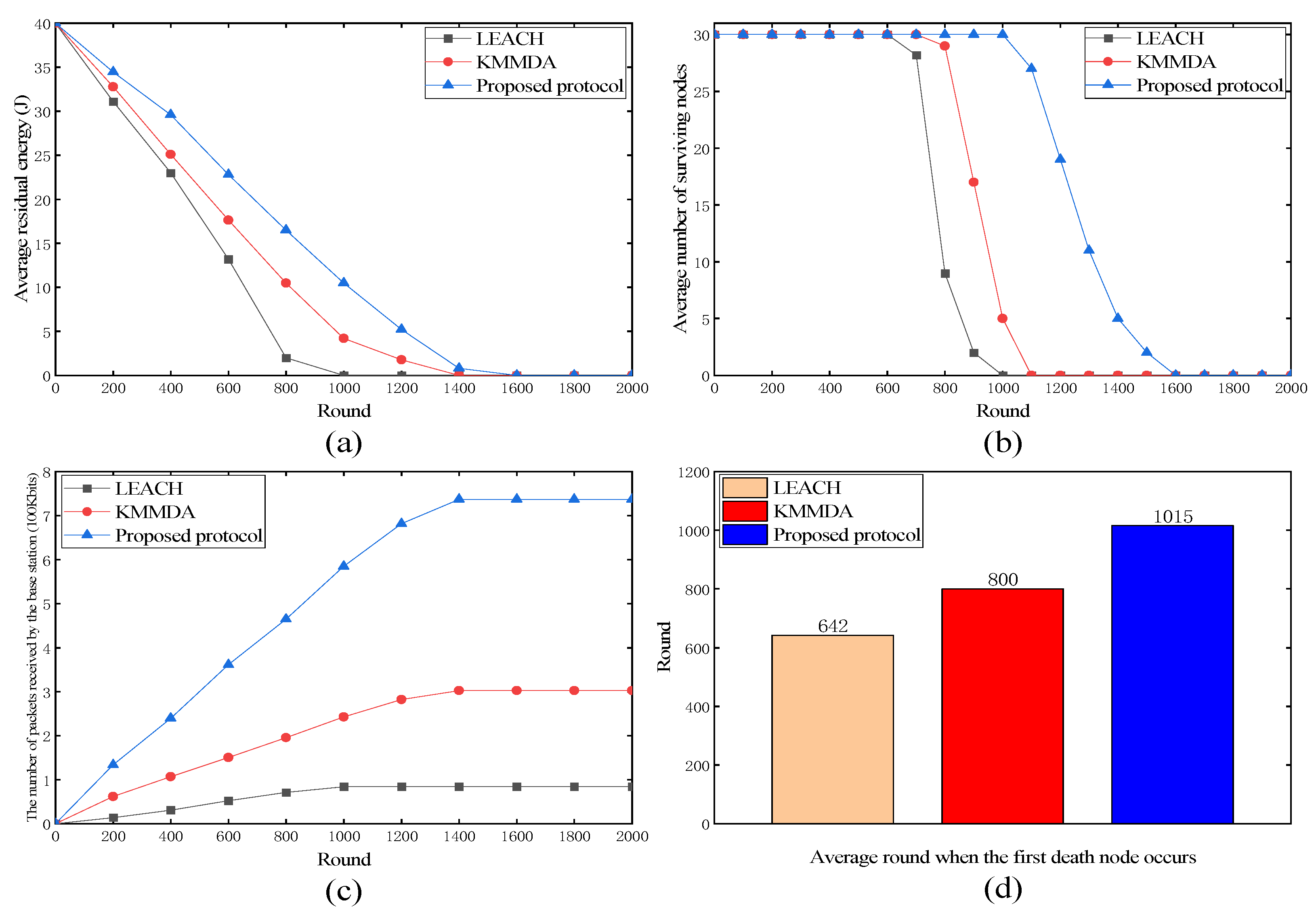
4.3.1. Proposed Protocol versus LEACH and KMMDA
4.3.2. Comparative Analysis of Protocol Improvements
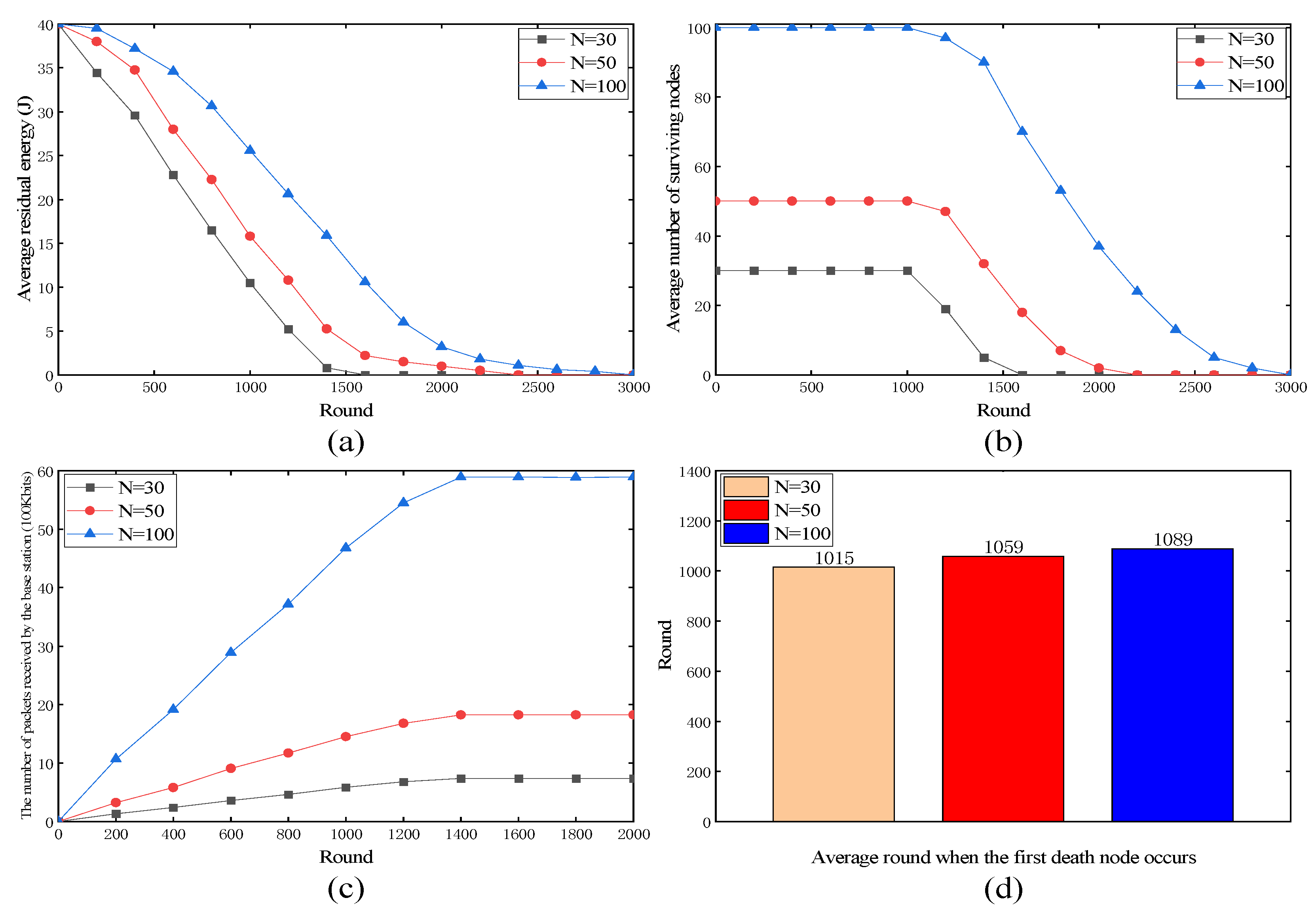
4.3.3. Performance Evaluation under Different Node Densities
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Luo, H.; Wu, K.; Ruby, R.; Hong, F.; Ni, L.M. Simulation and Experimentation Platforms for Underwater Acoustic Sensor Networks: Advancements and Challenges. ACM Comput. Surv. 2017, 50, 1–44. [Google Scholar] [CrossRef]
- Luo, J.; Fan, L.; Wu, S.; Yan, X. Research on localization algorithms based on acoustic communication for underwater sensor networks. Sensors 2017, 18, 67. [Google Scholar] [CrossRef] [PubMed]
- Pompili, D.; Akyildiz, I.F. Overview of networking protocols for underwater wireless communications. IEEE Commun. Mag. 2009, 47, 97–102. [Google Scholar] [CrossRef]
- Heinzelman, W.R.; Chandrakasan, A.; Balakrishnan, H. Energy-efficient communication protocol for wireless microsensor networks. In Proceedings of the 33rd Annual Hawaii International Conference on System Sciences, Maui, HI, USA, 7 January 2000; Volume 12, p. 10. [Google Scholar]
- Younis, O.; Fahmy, S. HEED: A hybrid, energy-efficient, distributed clustering approach for ad hoc sensor networks. IEEE Trans. Mob. Comput. 2004, 3, 366–379. [Google Scholar] [CrossRef]
- Yi, S.; Heo, J.; Cho, Y.; Hong, J. PEACH: Power-efficient and adaptive clustering hierarchy protocol for wireless sensor networks. Comput. Commun. 2007, 30, 2842–2852. [Google Scholar] [CrossRef]
- Qing, L.; Zhu, Q.; Wang, M. Design of a distributed energy-efficient clustering algorithm for heterogeneous wireless sensor networks. Comput. Commun. 2006, 29, 2230–2237. [Google Scholar] [CrossRef]
- Khan, W.; Wang, H.; Anwar, M.S.; Ayaz, M.; Ahmad, S.; Ullah, I. A Multi-Layer Cluster Based Energy Efficient Routing Scheme for UWSNs. IEEE Access 2019, 7, 77398–77410. [Google Scholar] [CrossRef]
- Faheem, M.; Tuna, G.; Gungor, V.C. QERP: Quality-of-Service (QoS) Aware Evolutionary Routing Protocol for Underwater Wireless Sensor Networks. IEEE Syst. J. 2018, 12, 2066–2073. [Google Scholar] [CrossRef]
- Tu, S.; Zhu, X.; Chen, Y.; Xu, X. A Q-Learning and Data Priority-Based Routing Protocol with Dynamic Computing Cluster Head for Underwater Acoustic Sensor Networks. In Proceedings of the 2022 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Xi’an, China, 25–27 October 2022; pp. 1–5. [Google Scholar]
- Dhongdi, S.; Bhandari, A.; Singh, J.; Kachhadia, S.; Joshi, V. Joint clustering and routing protocol for 3-D underwater acoustic sensor network. In Proceedings of the 2018 Tenth International Conference on Ubiquitous and Future Networks (ICUFN), Prague, Czech Republic, 3–6 July 2018; pp. 415–420. [Google Scholar]
- Zhang, J.; Cai, M.; Han, G.; Qian, Y.; Shu, L. Cellular clustering-based interference-aware data transmission protocol for underwater acoustic sensor networks. IEEE Trans. Veh. Technol. 2020, 69, 3217–3230. [Google Scholar] [CrossRef]
- Liu, X.; Zhou, F. Energy-Efficient Routing Protocol Based on Data Dissemination for Underwater Wireless Sensor Network. In Proceedings of the OCEANS 2023-Limerick, Limerick, Ireland, 5–8 June 2023; pp. 1–5. [Google Scholar]
- Li, X.; Fang, S.-L.; Zhang, Y.-C. The study on clustering algorithm of the underwater acoustic sensor networks. In Proceedings of the 2007 14th International Conference on Mechatronics and Machine Vision in Practice, Xiamen, China, 4–6 December 2007; pp. 78–81. [Google Scholar]
- Zhang, Y.; Sun, H. A clustered routing protocol for underwater wireless sensor networks. In Proceedings of the 2015 34th Chinese Control Conference (CCC), Hangzhou, China, 28–30 July 2015; pp. 7665–7670. [Google Scholar]
- Mansouri, D.; Ioualalen, M. Adapting LEACH algorithm for underwater wireless sensor networks. In Proceedings of the Eleventh International Multi-Conference on Computing in the Global Information Technology, Barcelona, Spain, 13–17 November 2016; pp. 36–40. [Google Scholar]
- Alhazmi, A.S.; Moustafa, A.I.; AlDosari, F.M. Energy aware approach for underwater wireless sensor networks scheduling: UMOD_LEACH. In Proceedings of the 2018 21st Saudi Computer Society National Computer Conference (NCC), Riyadh, Saudi Arabia, 25–26 April 2018; pp. 1–5. [Google Scholar]
- Rizvi, H.H.; Khan, S.A.; Enam, R.N. Clustering base energy efficient mechanism for an underwater wireless sensor network. Wirel. Pers. Personal. Commun. 2022, 124, 3725–3741. [Google Scholar] [CrossRef]
- Schulkin, M.; Mercer, J.A. Colossus Revisited: A Review and Extension of the Marsh-Schulkin Shallow Water Transmission Loss Model; APL-UW 8508; Applied Physics Laboratory, University of Washington: Seattle, WA, USA, 1985. [Google Scholar]
- Heinzelman, W.B.; Chandrakasan, A.P.; Balakrishnan, H. An application-specific protocol architecture for wireless microsensor networks. IEEE Trans. Wirel. Commun. 2002, 1, 660–670. [Google Scholar] [CrossRef]
- Zhang, J.; Hu, Z.; Xiong, Y.; Ning, G. A collision-free hybrid MAC protocol based on pipeline parallel transmission for distributed multi-channel underwater acoustic networks. Electronics 2020, 9, 679. [Google Scholar] [CrossRef]
- Zhang, J.; Lai, H.; Xiong, Y. Concurrent transmission based on distributed scheduling for underwater acoustic networks. Sensors 2019, 19, 1871. [Google Scholar] [CrossRef] [PubMed]
- Peng, W.; Edwards, D.J. K-means like minimum mean distance algorithm for wireless sensor networks. In Proceedings of the 2010 2nd International Conference on Computer Engineering and Technology, Chengdu, China, 16–18 April 2010; pp. V1-120–V1-124. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Number of nodes N | 30 |
| Maximum number of iterations | 2000 |
| Network communication rounds | 2000 |
| Node initial energy | 40 |
| Length of water body | 150 m |
| Node depth | 50 m |
| Packet reception minimum sound level | 1 |
| Non-cluster header packet size | 50 bits |
| Cluster header packet maximum | 500 bits |
| Node receives 1 bit of data energy consumption | |
| Guard time slot | 0.2 s |
| Underwater sound velocity | 1500 m/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, K.; Zhou, C.; Zhang, J. Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks. Sensors 2024, 24, 556. https://doi.org/10.3390/s24020556
Tian K, Zhou C, Zhang J. Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks. Sensors. 2024; 24(2):556. https://doi.org/10.3390/s24020556
Chicago/Turabian StyleTian, Kun, Chang Zhou, and Jun Zhang. 2024. "Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks" Sensors 24, no. 2: 556. https://doi.org/10.3390/s24020556
APA StyleTian, K., Zhou, C., & Zhang, J. (2024). Improved LEACH Protocol Based on Underwater Energy Propagation Model, Parallel Transmission, and Replication Computing for Underwater Acoustic Sensor Networks. Sensors, 24(2), 556. https://doi.org/10.3390/s24020556