
Uncertainty Evaluation of a Gas Turbine Model Based on a Nonlinear Autoregressive Exogenous Model and Monte Carlo Dropout


 ,
,  ,
,
Abstract
1. Introduction
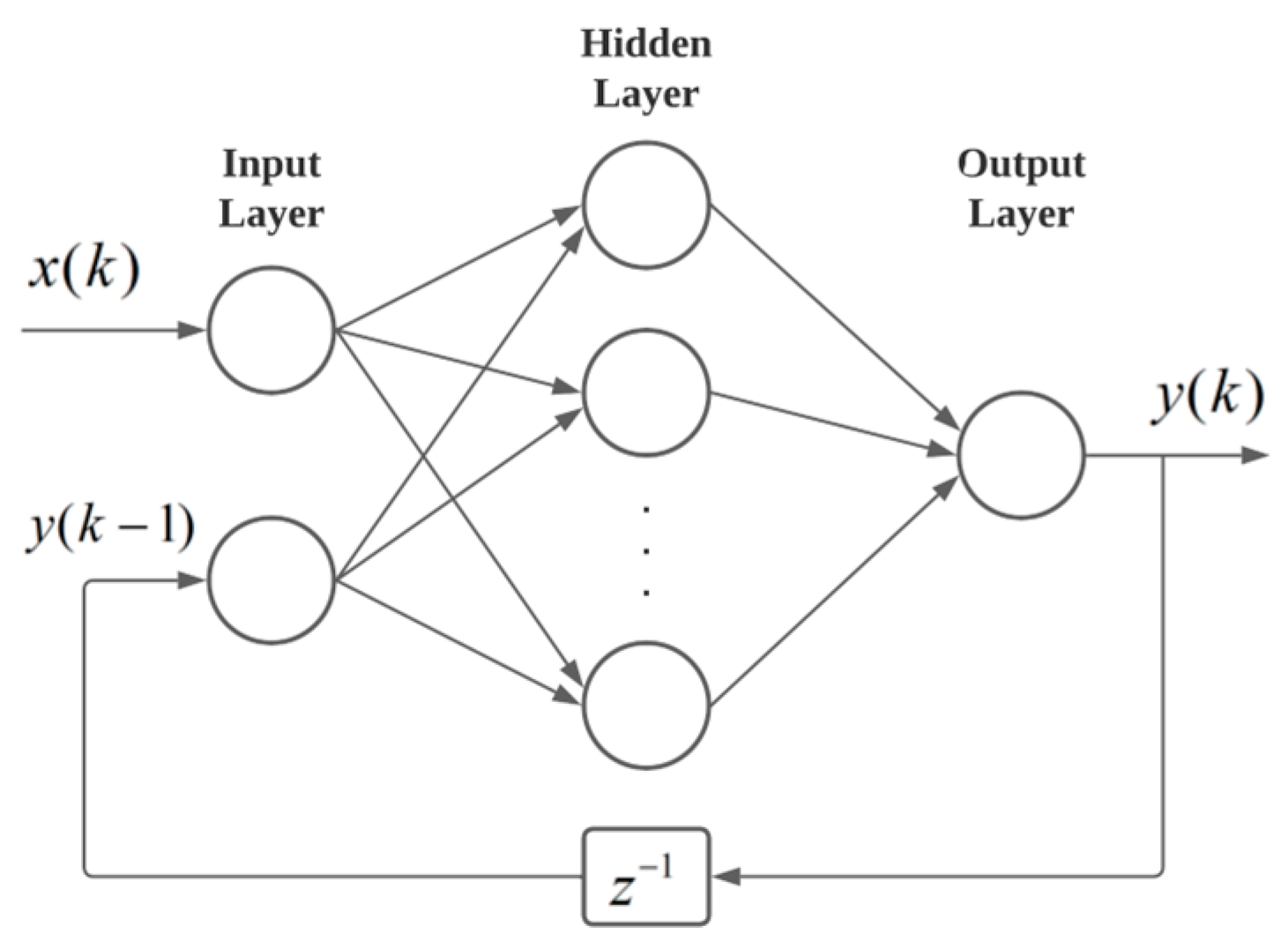
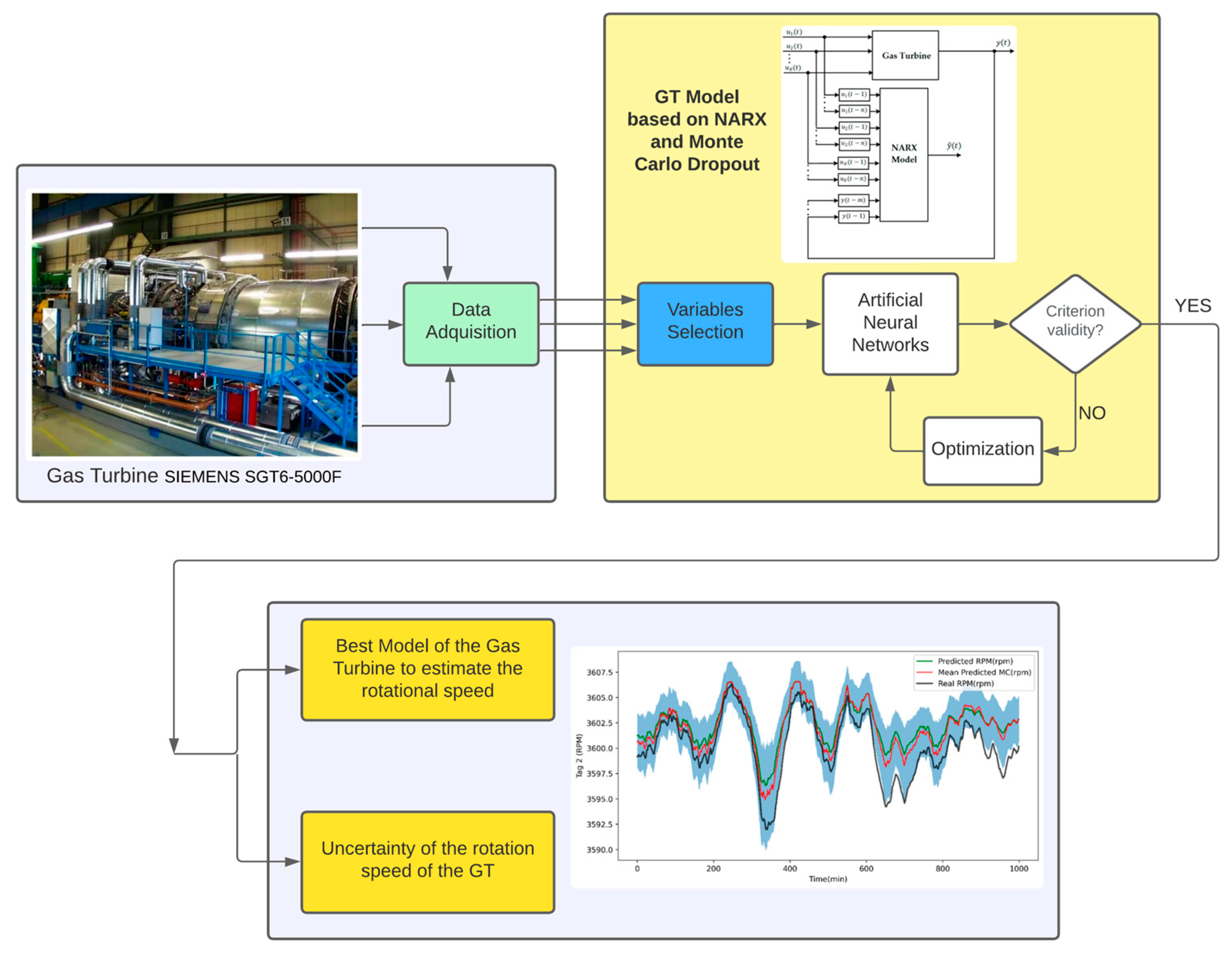
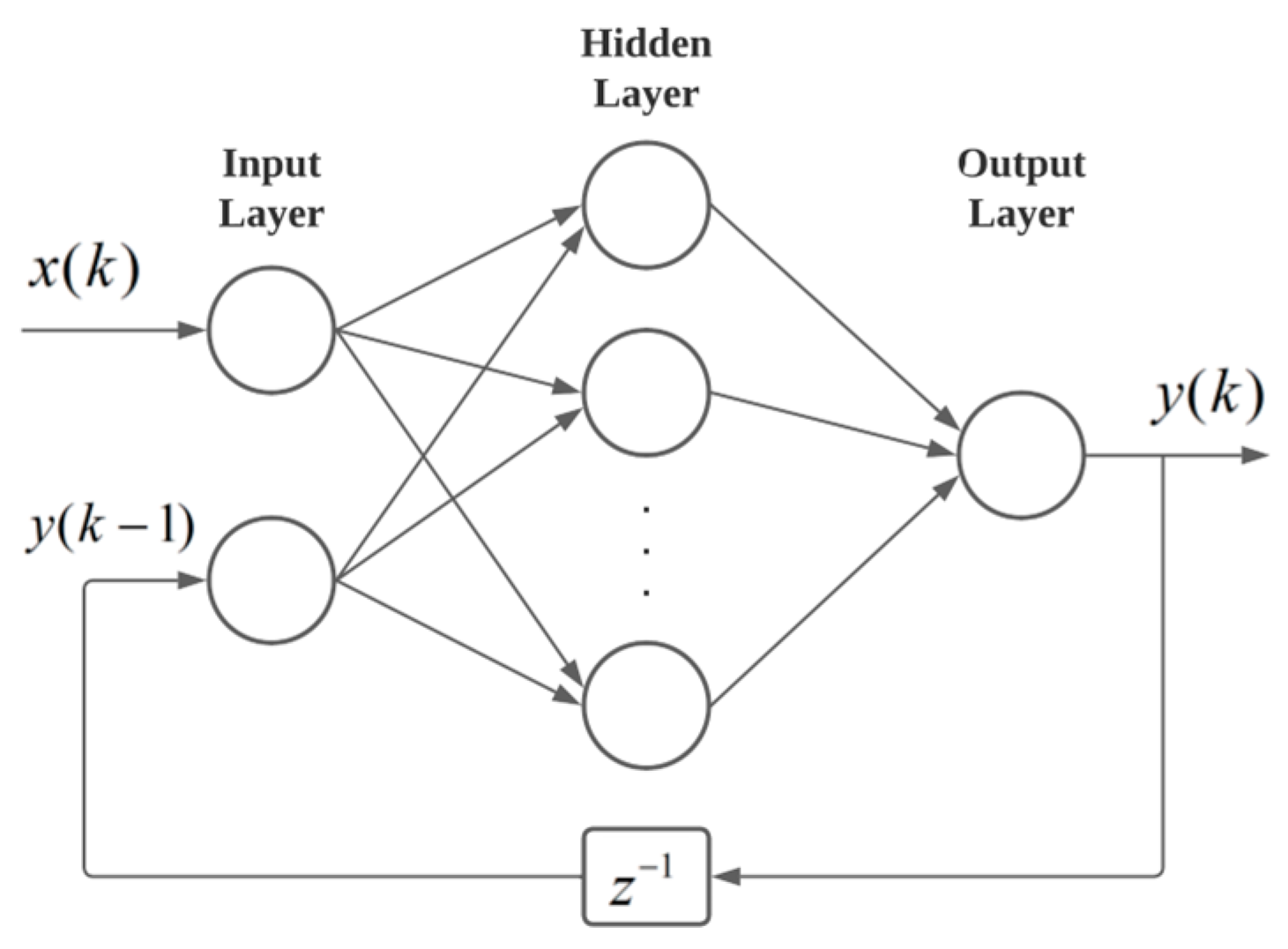
2. Gas Turbine Model Based on NARX
3. Uncertainty Assessment Procedure
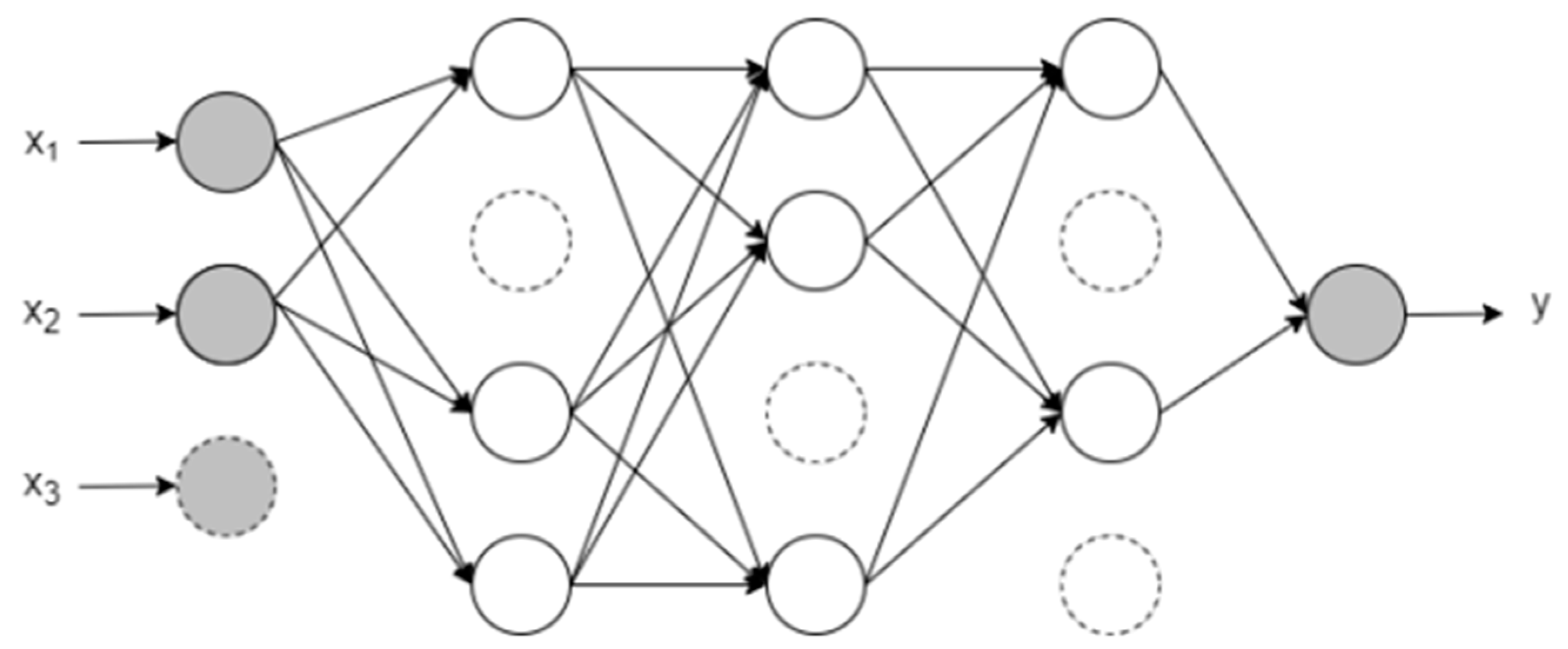
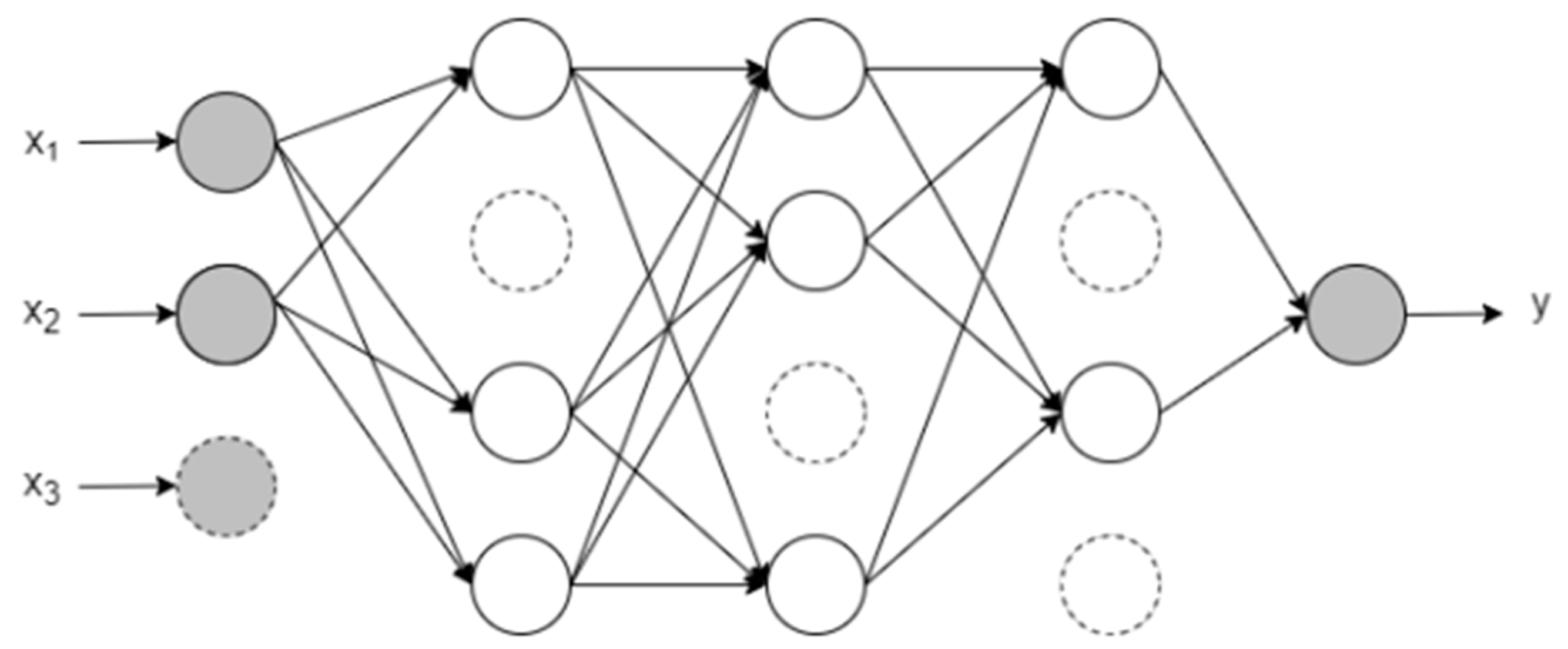
3.1. Dropout as a Regularization Technique
3.2. Uncertainties in Deep Learning Models
3.3. Uncertainties Estimation
4. Results
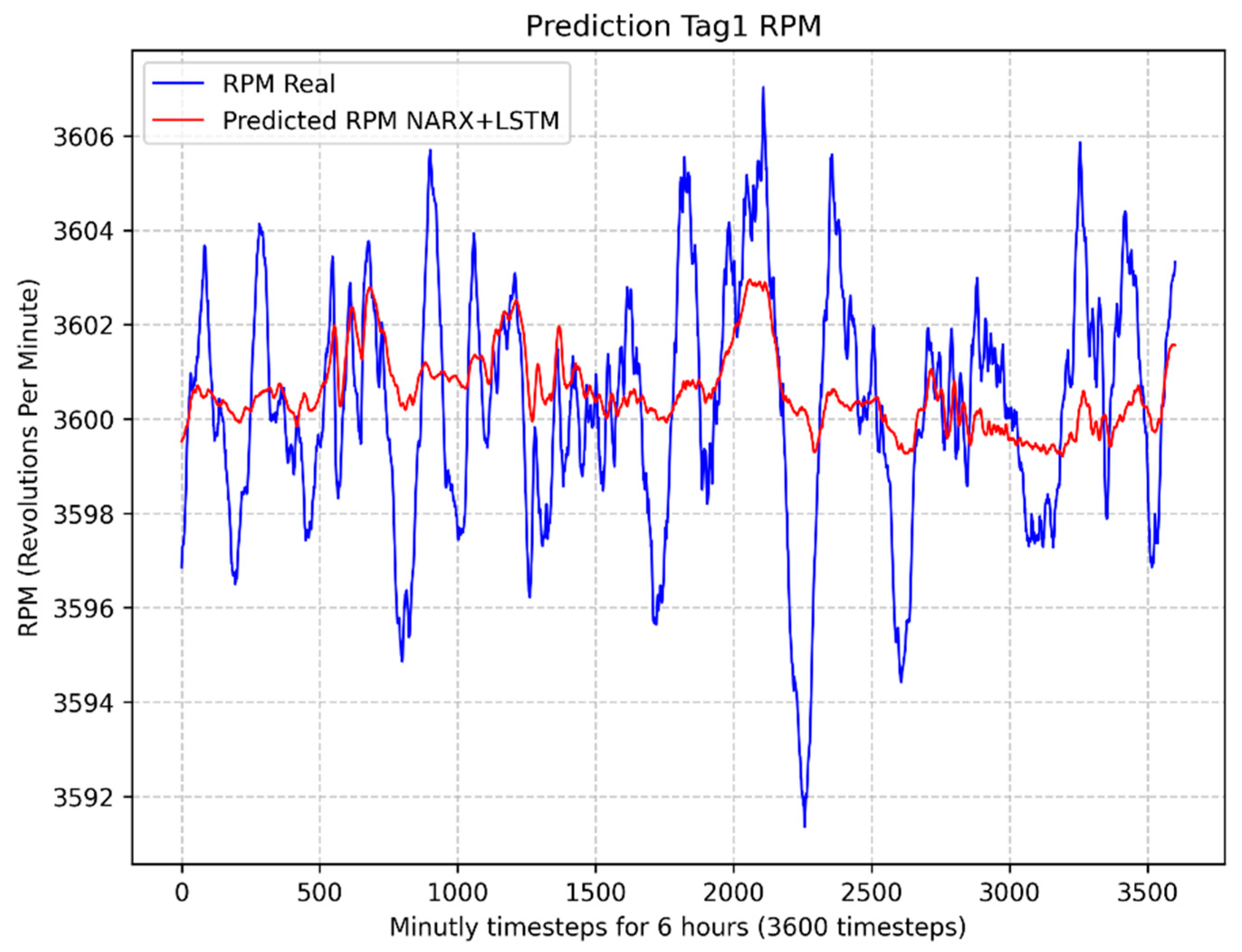
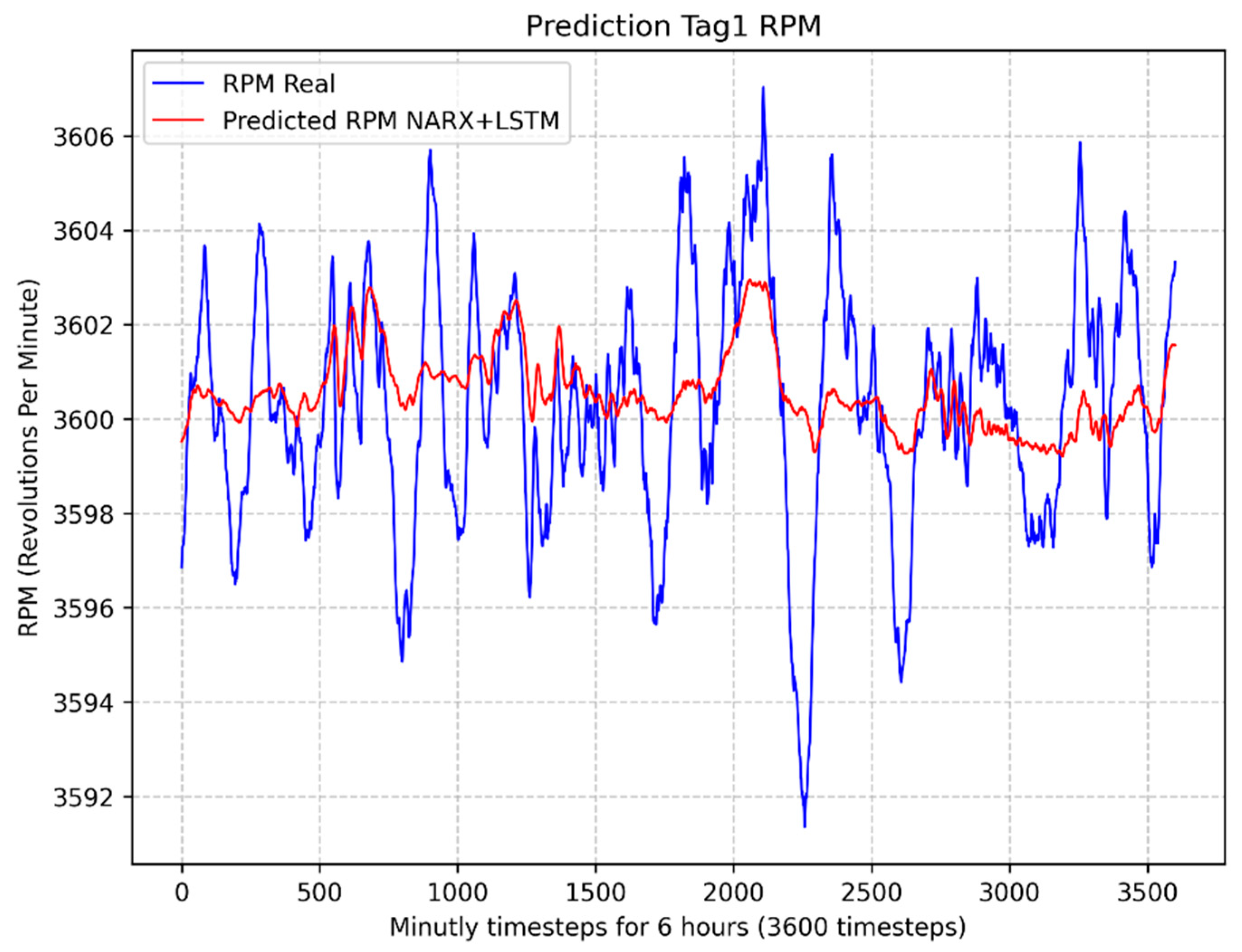
4.1. Comparison between NARX and LSTM for Rotation Speed Estimation
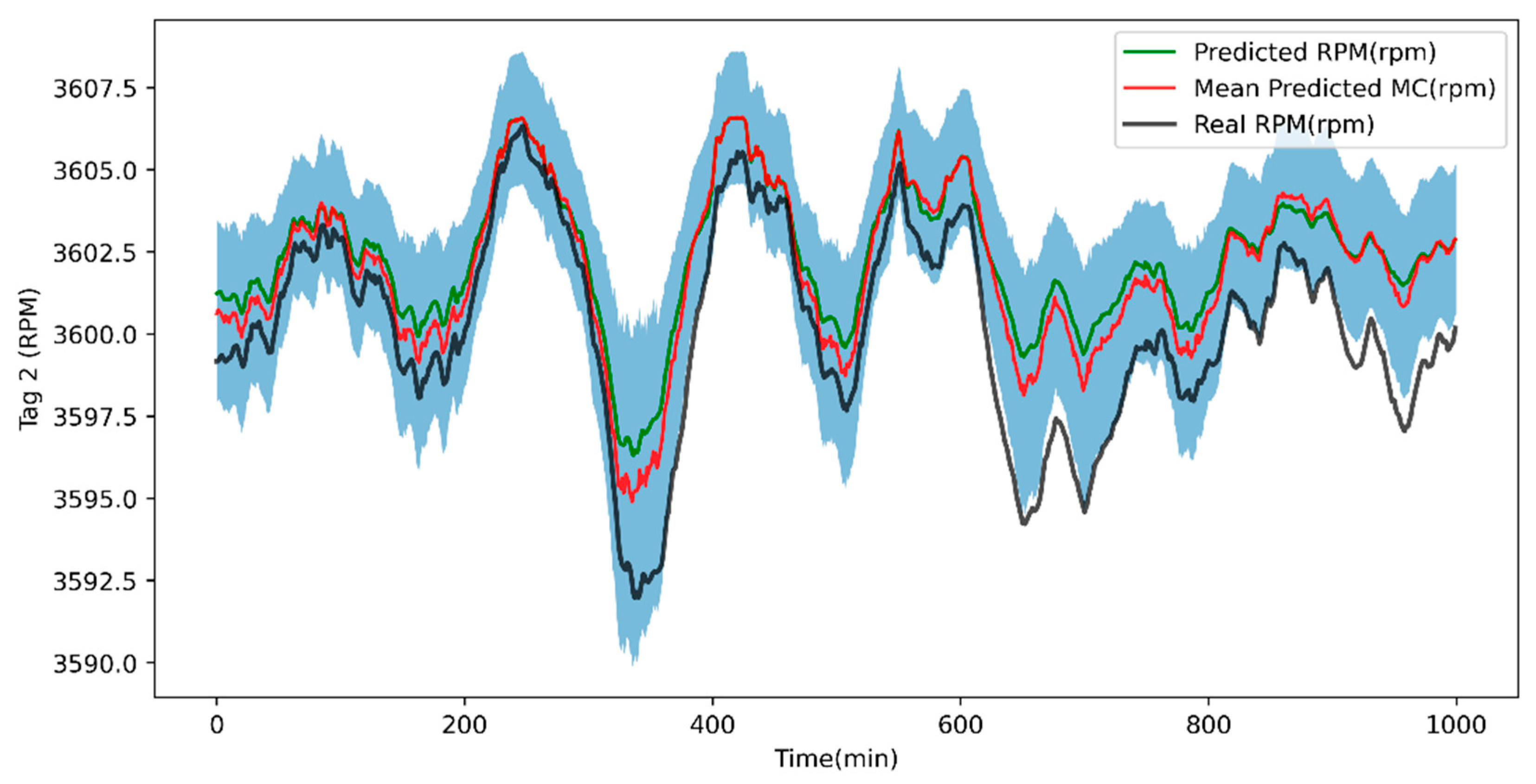
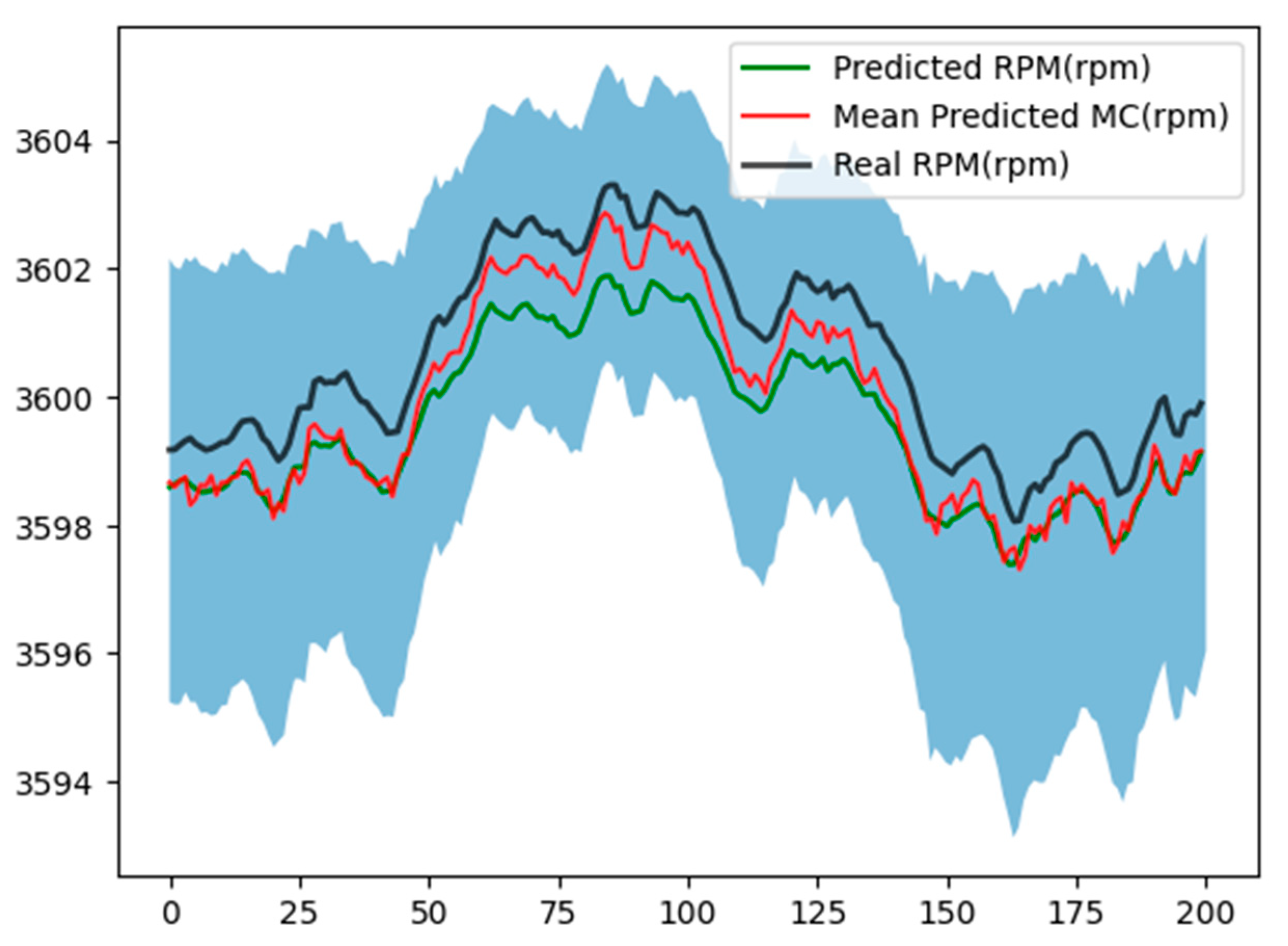
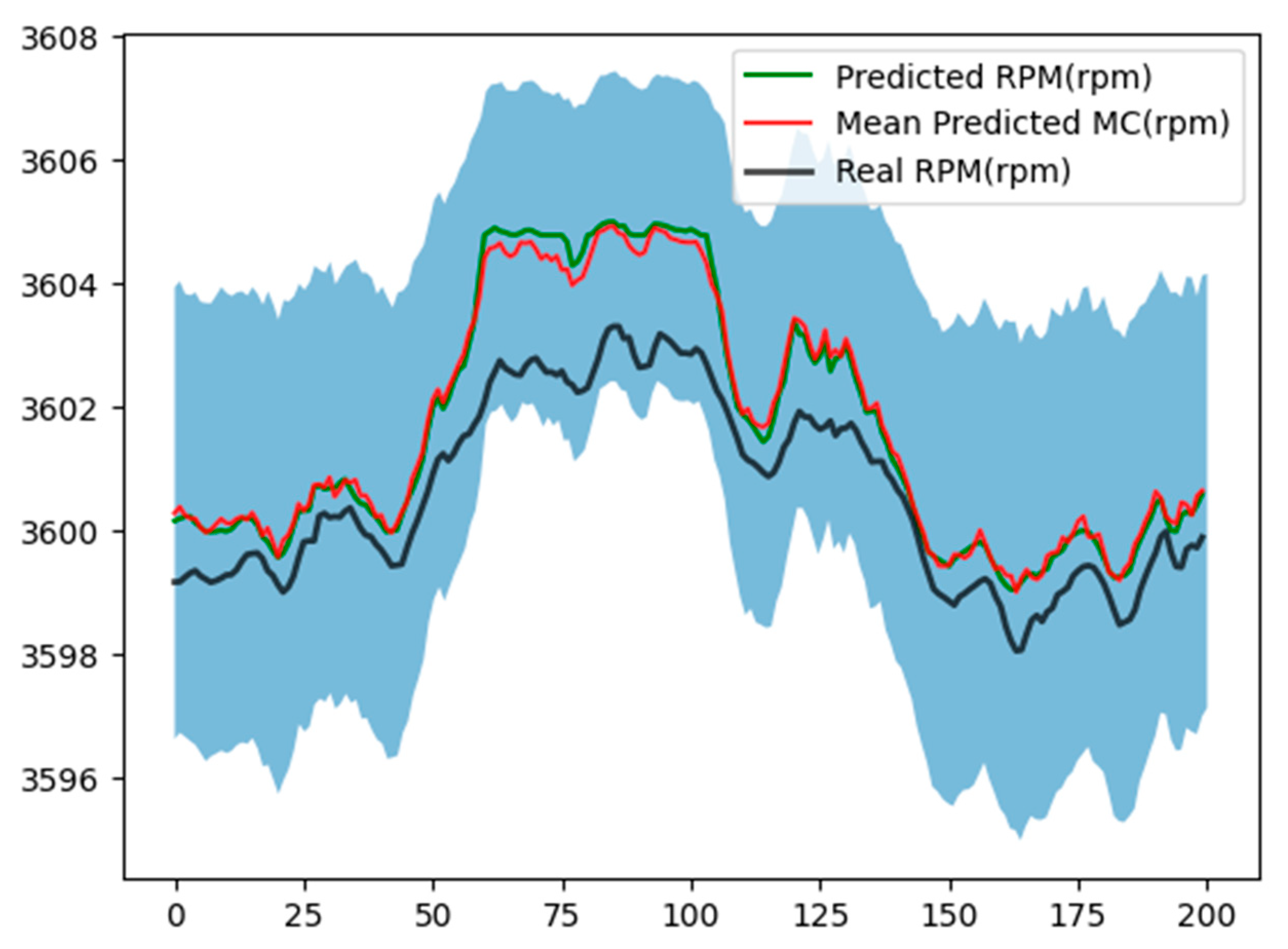
4.2. Uncertainty Evaluation of the Rotational Speed Estimation Using the NARX Model
4.3. Analysis and Study of the Parameters Tuning of the Monte Carlo Dropout
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ravichandran, T.; Liu, Y.; Kumar, A.; Srivastava, A. Convolutional Neural Networks for Gas Turbine Exhaust Gas Temperature and Power Predictions. In Proceedings of the 2023 IEEE International Conference on Prognostics and Health Management (ICPHM), Montreal, QC, Canada, 5–7 June 2023; pp. 119–127. [Google Scholar] [CrossRef]
- Marin, G.; Osipov, B.; Titov, A.; Akhmetshin, A.; Shubina, A.; Novoselova, M. Improving the Performance of Power Plants with Gas Turbine Units. In Proceedings of the 2022 4th International Conference on Control Systems, Mathematical Modeling, Automation and Energy Efficiency (SUMMA), Lipetsk, Russian, 9–11 November 2022; pp. 832–836. [Google Scholar] [CrossRef]
- Sheludko, V.N.; Sokolov, P.V.; Andrievsky, O.A.; Andrievskaya, N.V. Gas Turbine Selective Control System. In Proceedings of the 2023 XXVI International Conference on Soft Computing and Measurements (SCM), Saint Petersburg, Russian, 24–26 May 2023; pp. 57–60. [Google Scholar] [CrossRef]
- Fentaye, A.D.; Baheta, A.T.; Gilani, S.I.; Kyprianidis, K.G. A Review on Gas Turbine Gas-Path Diagnostics: State-of-the-Art Methods, Challenges and Opportunities. Aerospace 2019, 6, 83. [Google Scholar] [CrossRef]
- Mai, C.V.; Spiridonakos, M.D.; Chatzi, E.N.; Sudret, B. Surrogate Modelling for Stochastic Dynamical Systems by Combining NARX Models and Polynomial Chaos Expansions. Technical report RSUQ-2016-002, Eidgenössische Technische Hochschule Zürich, Germany. 2016. Available online: https://ethz.ch/content/dam/ethz/special-interest/baug/ibk/risk-safety-and-uncertainty-dam/publications/reports/RSUQ-2016-002.pdf (accessed on 18 July 2023).
- Malmström, M. Uncertainties in Neural Networks: A System Identification Approach. Swedish Licentiate’s Thesis N° 1902, Department of Electrical Engineering, Linköping University, Sweden. 2021. Available online: https://liu.diva-portal.org/smash/get/diva2:1541951/FULLTEXT01.pdf (accessed on 18 July 2023).
- Worden, K.; Surace, C.; Becker, W. Uncertainty Bounds on Higher-Order FRFs from Gaussian Process NARX Models. Procedia Eng. 2017, 199, 1994–2000. Available online: https://www.sciencedirect.com/science/article/pii/S1877705817338018 (accessed on 18 July 2023). [CrossRef]
- Bhattacharyya, B.; Jacquelin, B.; Brizard, D. A Kriging–NARX Model for Uncertainty Quantification of Nonlinear Stochastic Dynamical Systems in Time Domain. J. Eng. Mech. 2020, 146, 04020070. [Google Scholar] [CrossRef]
- Cao, L.; Zhang, H.; Meng, Z.; Wang, X. A parallel GRU with dual-stage attention mechanism model integrating uncertainty quantification for probabilistic RUL prediction of wind turbine bearings. Reliab. Eng. Syst. Saf. 2023, 235, 109197. [Google Scholar] [CrossRef]
- Monteiro, R.V.A.; Guimarães, G.C.; Moura, F.A.M.; Albertini, M.R.M.C.; Albertini, M.K. Estimating photovoltaic power generation: Performance analysis of artificial neural networks, Support Vector Machine and Kalman filter. Electr. Power Syst. Res. 2017, 143, 643–656. [Google Scholar] [CrossRef]
- Powell, K.M.; Sriprasad, A.; Cole, W.J.; Edgar, T.F. Heating, cooling, and electrical load forecasting for a large-scale district energy system. Energy 2014, 74, 877–885. [Google Scholar] [CrossRef]
- Molkdaragh, R.R.; Jafarmadar, S.; Khalilaria, S.; Saraee, H.S. Prediction of the performance and exhaust emissions of a compression ignition engine using a wavelet neural network with a stochastic gradient algorithm. Energy 2018, 142, 1128–1138. [Google Scholar] [CrossRef]
- Hernández-Casas, S.; Beltrán-Morales, L.F.; Vargas-López, V.G.; Vergara-Solana, F.; Seijo, J.C. Price Forecast for Mexican Red Spiny Lobster (Panulirus spp.) Using Artificial Neural Networks (ANNs). Appl. Sci. 2022, 12, 6044. [Google Scholar] [CrossRef]
- Tahan, M.; Tsoutsanis, E.; Muhammad, M.; Abdul Karim, Z.A. Performance-based health monitoring, diagnostics and prognostics for condition-based maintenance of gas turbines: A review. Appl. Energy 2017, 198, 122–144. [Google Scholar] [CrossRef]
- Hanachi, H.; Mechefske, C.; Liu, J.; Banerjee, A.; Chen, Y. Performance-Based Gas Turbine Health Monitoring, Diagnostics, and Prognostics: A Survey. IEEE Trans. Reliab. 2018, 67, 1340–1363. [Google Scholar] [CrossRef]
- Minghui, H.U.; Ya, H.E.; Xinzhi, L.I.N.; Ziyuan, L.U.; Zhinong, J.I.A.N.G.; Bo, M.A. Digital twin model of gas turbine and its application in warning of performance fault. Chin. J. Aeronaut. 2023, 36, 449–470. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Strafella, L.; Ficarella, A. Neural Nonlinear Autoregressive Model with Exogenous Input (NARX) for Turboshaft Aeroengine Fuel Control Unit Model. Aerospace 2021, 8, 206. [Google Scholar] [CrossRef]
- De Giorgi, M.G.; Quarta, M. Hybrid MultiGene Genetic Programming—Artificial neural networks. Aerosp. Sci. Technol. 2020, 103, 105902. [Google Scholar] [CrossRef]
- Srivastava, N.; Hinton, G.; Krizhevsky, A.; Sutskever, I.; Salakhutdinov, R. Dropout: A simple way to prevent neural networks from overfitting. J. Mach. Learn. Res. 2014, 15, 1929–1958. [Google Scholar]
- Gal, Y.; Ghahramani, Z. Dropout as a Bayesian Approximation: Representing Model Uncertainty in Deep Learning. arXiv 2015, arXiv:1506.02142. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Input Variables | Output Variables |
|---|---|
| u1(t): Gas fuel flow (Kg/s) | |
| u2(t): Inlet air temperature (°C) | y1(t): rotational speed (RPM) |
| u3(t): Barometric pressure (INH20) |
| Model | NARX | NARX + LSTM | LSTM |
|---|---|---|---|
| Dense 1 | 32 | 32 | 128 |
| Dropout | 0.5 | 0.01 | 0.01 |
| Dense 2 | 10 | 10 | 50 |
| Batch Size | 32 | 32 | 32 |
| Activation function | Tanh | Tanh | Tanh |
| Lookback | 5 | 5 | 15 |
| Model | NARX | NARX + LSTM | LSTM |
|---|---|---|---|
| MSE | 1.80 | 5.22 | 7.62 |
| MAE | 0.98 | 1.78 | 2.15 |
| MAPE | 0.02% | 0.045% | 0.055% |
| Training time (s) | 41.88 | 85.09 | 121.32 |
| N° NARX | Dense 1 | Dropout | Dense 2 | Activation Function | Lookback |
|---|---|---|---|---|---|
| 1 | 32 | 0.5 | 10 | Tanh | 5 |
| 2 | 32 | 0.25 | 10 | Tanh | 5 |
| 3 | 32 | 0.35 | 10 | Tanh | 15 |
| 4 | 128 | 0.15 | 32 | Tanh | 20 |
| 5 | 64 | 0.5 | 16 | Tanh | 5 |
| N° NARX | Fixed Parameters | Flexible Parameters | |||||
|---|---|---|---|---|---|---|---|
| l | λ | n_Train | p | M | e_Order | e_Delay | |
| 1 | 0.1 | 10−6 | 25 | 0.50 | 10 | 1 | 8 |
| 2 | 0.1 | 10−6 | 25 | 0.25 | 50 | 1 | 0 |
| 3 | 0.1 | 10−6 | 25 | 0.35 | 100 | 4 | 0 |
| 4 | 0.1 | 10−6 | 25 | 0.05 | 100 | 2 | 5 |
| 5 | 0.1 | 10−6 | 25 | 0.45 | 250 | 1 | 0 |
| N° NARX | Fixed Parameters | Flexible Parameters | Results | |||
|---|---|---|---|---|---|---|
| l | λ | p | n_train | M | Standard Deviation (MW) | |
| 1 | 0.1 | 10−6 | 0.25 | 250 | 500 | 2.64 |
| 2 | 0.1 | 10−6 | 0.25 | 250 | 1000 | 2.64 |
| 3 | 0.1 | 10−6 | 0.05 | 500 | 1000 | 2.21 |
| 4 | 0.1 | 10−6 | 0.05 | 500 | 500 | 2.19 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cajahuaringa, A.; Palacios, R.A.; Mauricio Villanueva, J.M.; Morales-Villanueva, A.; Machuca, J.; Contreras, J.; Rodríguez Bautista, K. Uncertainty Evaluation of a Gas Turbine Model Based on a Nonlinear Autoregressive Exogenous Model and Monte Carlo Dropout. Sensors 2024, 24, 465. https://doi.org/10.3390/s24020465
Cajahuaringa A, Palacios RA, Mauricio Villanueva JM, Morales-Villanueva A, Machuca J, Contreras J, Rodríguez Bautista K. Uncertainty Evaluation of a Gas Turbine Model Based on a Nonlinear Autoregressive Exogenous Model and Monte Carlo Dropout. Sensors. 2024; 24(2):465. https://doi.org/10.3390/s24020465
Chicago/Turabian StyleCajahuaringa, Armando, Rubén Aquize Palacios, Juan M. Mauricio Villanueva, Aurelio Morales-Villanueva, José Machuca, Juan Contreras, and Kiara Rodríguez Bautista. 2024. "Uncertainty Evaluation of a Gas Turbine Model Based on a Nonlinear Autoregressive Exogenous Model and Monte Carlo Dropout" Sensors 24, no. 2: 465. https://doi.org/10.3390/s24020465
APA StyleCajahuaringa, A., Palacios, R. A., Mauricio Villanueva, J. M., Morales-Villanueva, A., Machuca, J., Contreras, J., & Rodríguez Bautista, K. (2024). Uncertainty Evaluation of a Gas Turbine Model Based on a Nonlinear Autoregressive Exogenous Model and Monte Carlo Dropout. Sensors, 24(2), 465. https://doi.org/10.3390/s24020465