
Performance Evaluation of Real-Time Kinematic Global Navigation Satellite System with Survey-Grade Receivers and Short Observation Times in Forested Areas


Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Field Data Collection
2.3. Accuracy and Precision Estimates
2.4. Potential Factors Considered as an Influence on GNSS Accuracy and Precision
- GNSS factors: Point Dilution of Precision (PDOP), Horizontal Dilution of Precision (HDOP), Vertical Dilution of Precision (VDOP), number of visible satellites and the proportion of Float/DGPS solutions.
- Environmental factors: ground slope (calculated from a DTM interpolated at a 5 m resolution from ZTruth values), forest composition (which test plot the points belong to) and NDVI (calculated in Google Earth Engine at a 20 m resolution from cloud-free Sentinel-2 imagery collected between 2022 and 2024).
- Factors related to tree locations: distance to the nearest tree, number of trees within radii of 2, 4, 6, 8 and 10 m around each point and the average distance to trees in these radii.
3. Results
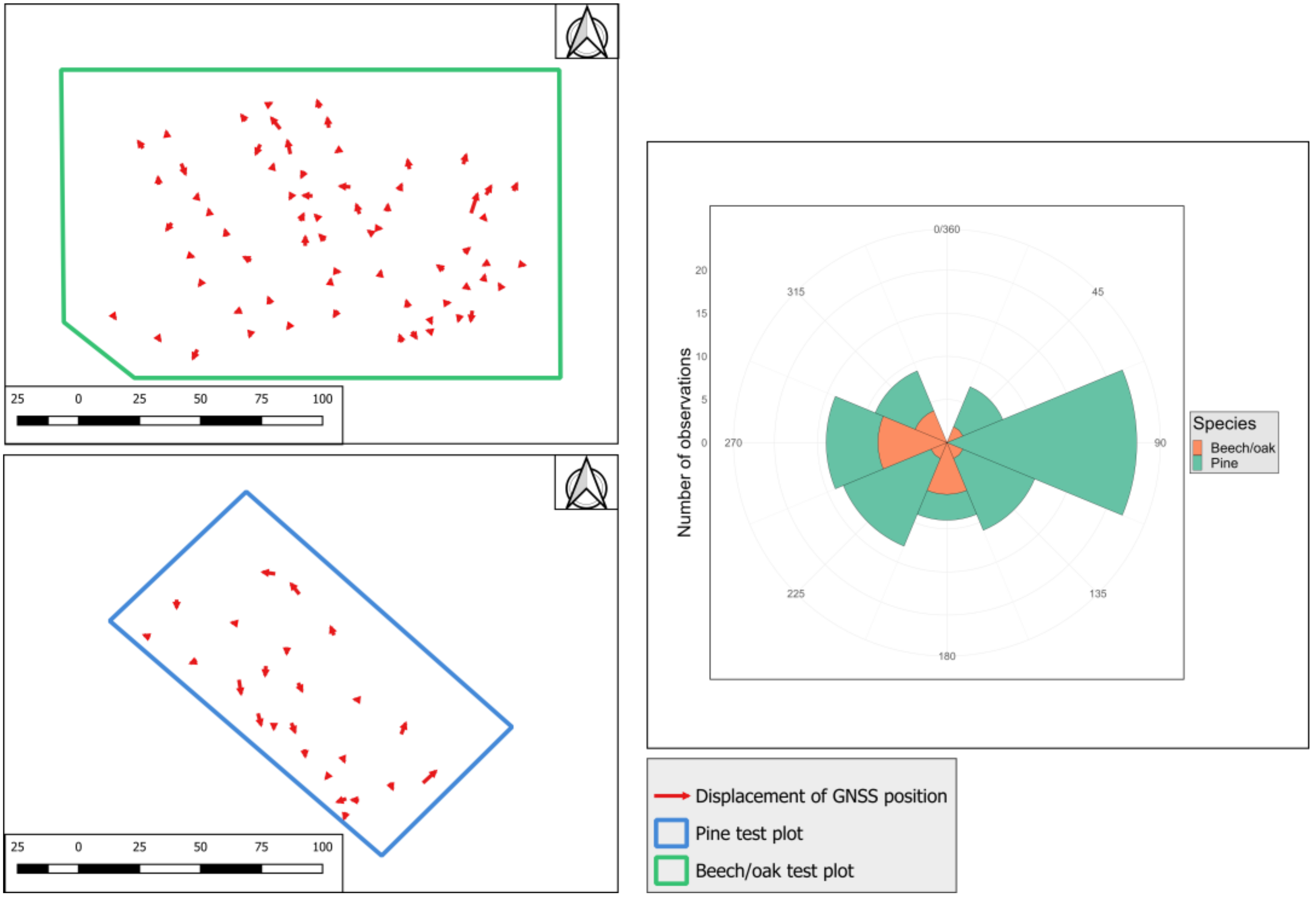
3.1. GNSS Accuracy in Coniferous/Deciduous Forest Conditions
3.2. Variation in GNSS Conditions under the Forest Canopy
3.3. Distribution of Trees around Test Points
3.4. Importance of Factor Variation on GNSS Accuracy
- When all points are considered together: Species is significant for both horizontal and vertical accuracy, while No. of satellites and Slope are significant only for vertical accuracy.
- For the coniferous plot: No. of trees in a 4 m radius and Distance to nearest tree are significant for horizontal accuracy, while no factors are identified as significant for vertical accuracy.
- For the deciduous plot: no factors are identified as significant for either horizontal or vertical accuracy.
- When all points are considered together: PDOP and No. of satellites are significant for horizontal/vertical precision, while Species and Slope are significant only for horizontal and vertical precision, respectively.
- For the coniferous plot: No. of satellites is significant for horizontal precision, with no significant factors for vertical precision.
- For the deciduous plot: PDOP is significant for horizontal precision, while Slope is significant for vertical precision.
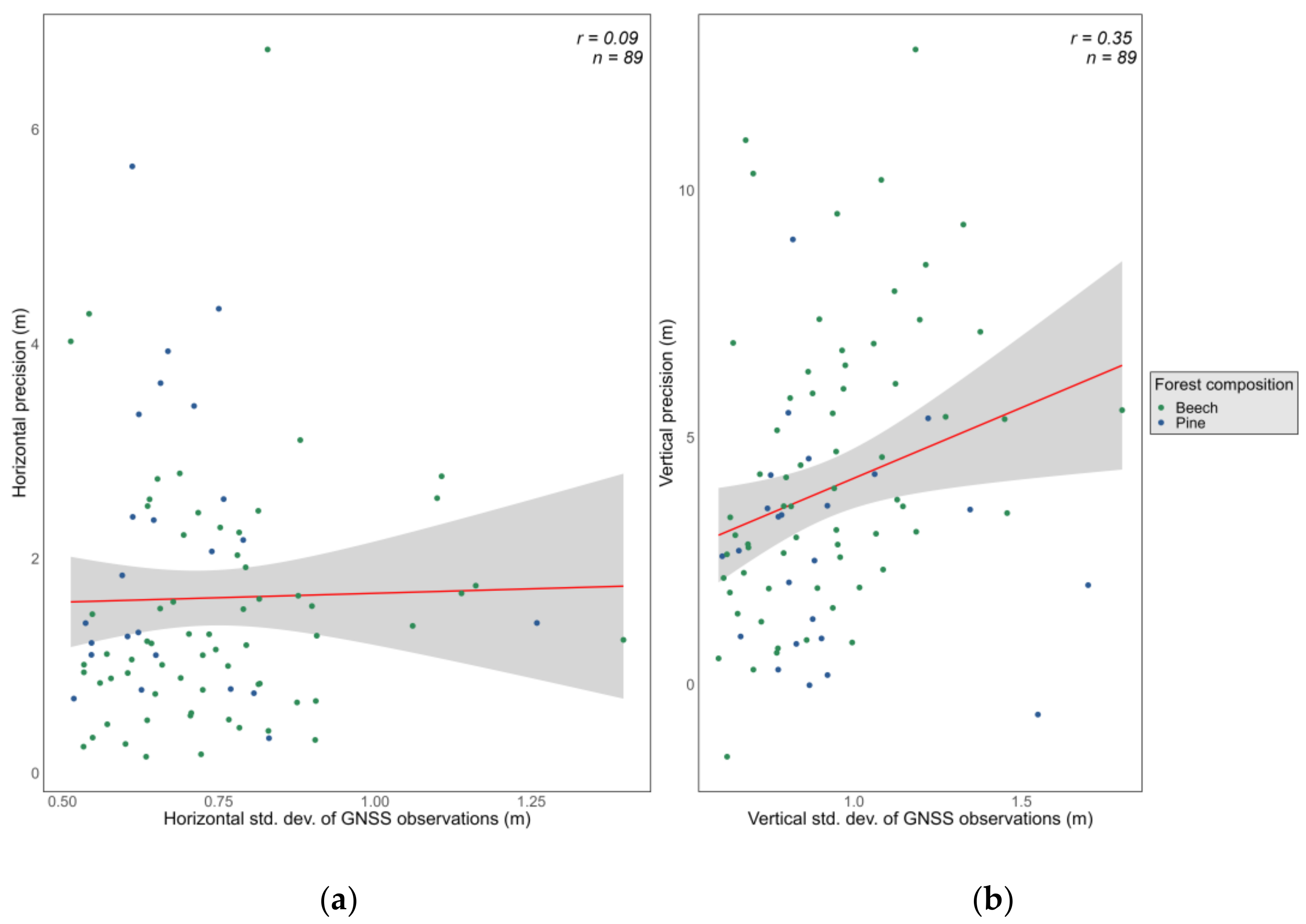
3.5. Level of Agreement between GNSS Accuracy and Precision
4. Discussion
4.1. GNSS Accuracy in Coniferous/Deciduous Forest Conditions
4.2. GNSS Solution Type under the Forest Canopy
4.3. Relative Importance of Factors for GNSS Accuracy/Precision
4.4. On Accuracy vs. Precision of GNSS-Determined Positions
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tomaštík, J.; Varga, M. Practical Applicability of Processing Static, Short-Observation-Time Raw GNSS Measurements Provided by a Smartphone under Tree Vegetation. Measurement 2021, 178, 109397. [Google Scholar] [CrossRef]
- Bettinger, P.; Merry, K.; Bayat, M.; Tomaštík, J. GNSS Use in Forestry—A Multi-National Survey from Iran, Slovakia and Southern USA. Comput. Electron. Agric. 2019, 158, 369–383. [Google Scholar] [CrossRef]
- Weaver, S.A.; Ucar, Z.; Bettinger, P.; Merry, K. How a GNSS Receiver Is Held May Affect Static Horizontal Position Accuracy. PLoS ONE 2015, 10, e0124696. [Google Scholar] [CrossRef]
- D’Eon, S.P. Forest Canopy Interference with GPS Signals at Two Antenna Heights. North. J. Appl. For. 1996, 13, 89–91. [Google Scholar] [CrossRef]
- Næsset, E. Point Accuracy of Combined Pseudorange and Carrier Phase Differential GPS under Forest Canopy. Can. J. For. Res. 1999, 29, 547–553. [Google Scholar] [CrossRef]
- Bettinger, P.; Fei, S. One Year’s Experience with a Recreation-Grade GPS Receiver. Math. Comput. Nat. Resour. Sci. 2010, 2, 153–160. [Google Scholar]
- Bastos, A.S.; Hasegawa, H. Behavior of GPS Signal Interruption Probability under Tree Canopies in Different Forest Conditions. Eur. J. Remote Sens. 2013, 46, 613–622. [Google Scholar] [CrossRef]
- Bettinger, P.; Merry, K. Influence of the Juxtaposition of Trees on Consumer-Grade GPS Position Quality. Math. Comput. Nat. Resour. Sci. 2012, 4, 81–91. [Google Scholar]
- Hasegawa, H.; Yoshimura, T. Application of Dual-Frequency GPS Receivers for Static Surveying under Tree Canopies. J. For. Res. 2003, 8, 0103–0110. [Google Scholar] [CrossRef]
- Becker, R.M.; Keefe, R.F.; Anderson, N.M. Use of Real-Time GNSS-RF Data to Characterize the Swing Movements of Forestry Equipment. Forests 2017, 8, 44. [Google Scholar] [CrossRef]
- Kaartinen, H.; Hyyppä, J.; Vastaranta, M.; Kukko, A.; Jaakkola, A.; Yu, X.; Pyörälä, J.; Liang, X.; Liu, J.; Wang, Y.; et al. Accuracy of Kinematic Positioning Using Global Satellite Navigation Systems under Forest Canopies. Forests 2015, 6, 3218–3236. [Google Scholar] [CrossRef]
- Tomppo, E.; Olsson, H.; Ståhl, G.; Nilsson, M.; Hagner, O.; Katila, M. Combining National Forest Inventory Field Plots and Remote Sensing Data for Forest Databases. Remote Sens. Environ. 2008, 112, 1982–1999. [Google Scholar] [CrossRef]
- Allan, B.M.; Arnould, J.P.Y.; Martin, J.K.; Ritchie, E.G. A Cost-Effective and Informative Method of GPS Tracking Wildlife. Wildl. Res. 2013, 40, 345–348. [Google Scholar] [CrossRef]
- Su, K.; Jin, S.; Hoque, M.M. Evaluation of Ionospheric Delay Effects on Multi-GNSS Positioning Performance. Remote Sens. 2019, 11, 171. [Google Scholar] [CrossRef]
- Næsset, E.; Gjevestad, J.G. Performance of GPS Precise Point Positioning Under Conifer Forest Canopies. Photogramm. Eng. Remote Sens. 2008, 74, 661–668. [Google Scholar] [CrossRef]
- Berber, M.; Arslan, N. Network RTK: A Case Study in Florida. Measurement 2013, 46, 2798–2806. [Google Scholar] [CrossRef]
- Enge, P.; Walter, T.; Pullen, S.; Kee, C.; Chao, Y.-C.; Tsai, Y.-J. Wide Area Augmentation of the Global Positioning System. Proc. IEEE 1996, 84, 1063–1088. [Google Scholar] [CrossRef]
- Gauthier, L.; Michel, P.; Ventura-Traveset, J.; Benedicto, J. EGNOS: The First Step in Europe’s Contribution to the Global Navigation Satellite System. ESA Bull. 2001, 105, 35–42. [Google Scholar]
- Ordóñez Galán, C.; Rodríguez-Pérez, J.R.; Martínez Torres, J.; García Nieto, P.J. Analysis of the Influence of Forest Environments on the Accuracy of GPS Measurements by Using Genetic Algorithms. Math. Comput. Model. 2011, 54, 1829–1834. [Google Scholar] [CrossRef]
- Vallet García, J.M.; Bhuiyan, M.Z.H. RTK+OSNMA Positioning for Road Applications: An Experimental Performance Analysis in Finland. Sensors 2024, 24, 621. [Google Scholar] [CrossRef]
- Du, L.; Chen, H.; Yuan, Y.; Song, L.; Meng, X. Global Navigation Satellite System Receiver Positioning in Harsh Environments via Clock Bias Prediction by Empirical Mode Decomposition and Back Propagation Neural Network Method. Sensors 2024, 24, 2342. [Google Scholar] [CrossRef]
- Zhu, F.; Hu, Z.; Liu, W.; Zhang, X. Dual-Antenna GNSS Integrated with MEMS for Reliable and Continuous Attitude Determination in Challenged Environments. IEEE Sens. J. 2019, 19, 3449–3461. [Google Scholar] [CrossRef]
- Fredeluces, E.; Ozeki, T.; Kubo, N.; El-Mowafy, A. Modified RTK-GNSS for Challenging Environments. Sensors 2024, 24, 2712. [Google Scholar] [CrossRef]
- Wang, S.; Wang, S.; Sun, X. A Multi-Scale Anti-Multipath Algorithm for GNSS-RTK Monitoring Application. Sensors 2023, 23, 8396. [Google Scholar] [CrossRef]
- Bakula, M.; Przestrzelski, P.; Kazmierczak, R. Reliable Technology of Centimeter GPS/GLONASS Surveying in Forest Environments. IEEE Trans. Geosci. Remote Sens. 2015, 53, 1029–1038. [Google Scholar] [CrossRef]
- Lee, T.; Bettinger, P.; Merry, K.; Cieszewski, C. The Effects of Nearby Trees on the Positional Accuracy of GNSS Receivers in a Forest Environment. PLoS ONE 2023, 18, e0283090. [Google Scholar] [CrossRef]
- Piedallu, C.; Gégout, J.-C. Effects of Forest Environment and Survey Protocol on GPS Accuracy. Photogramm. Eng. Remote Sens. 2005, 71, 1071–1078. [Google Scholar] [CrossRef]
- Deckert, C.; Bolstad, P.V. Forest Canopy, Terrain, and Distance Effects on Global Positioning System Point Accuracy. Photogramm. Eng. Remote Sens. 1996, 62, 317–321. [Google Scholar]
- Pirti, A.; Gumus, K.; Erkaya, H.; Hosbas, R.G. Evaluating Repeatability of RTK GPS/GLONASS Near/Under Forest Environment. Croat. J. For. Eng. 2010, 31, 23–33. [Google Scholar]
- Feng, T.; Chen, S.; Feng, Z.; Shen, C.; Tian, Y. Effects of Canopy and Multi-Epoch Observations on Single-Point Positioning Errors of a GNSS in Coniferous and Broadleaved Forests. Remote Sens. 2021, 13, 2325. [Google Scholar] [CrossRef]
- Naesset, E.; Jonmeister, T. Assessing Point Accuracy of DGPS Under Forest Canopy Before Data Acquisition, in the Field and After Postprocessing. Scand. J. For. Res. 2002, 17, 351–358. [Google Scholar] [CrossRef]
- Ogundipe, O.; Ince, S.; Bonenberg, K. GNSS Positioning under Forest Canopy. Disponível. 2014. Available online: https://www.researchgate.net (accessed on 15 August 2024).
- Rodríguez-Pérez, J.R.; Álvarez, M.F.; Sanz-Ablanedo, E. Assessment of Low-Cost GPS Receiver Accuracy and Precision in Forest Environments. J. Surv. Eng. 2007, 133, 159–167. [Google Scholar] [CrossRef]
- Lee, T.; Bettinger, P.; Cieszewski, C.J.; Gutierrez Garzon, A.R. The Applicability of Recreation-Grade GNSS Receiver (GPS Watch, Suunto Ambit Peak 3) in a Forested and an Open Area Compared to a Mapping-Grade Receiver (Trimble Juno T41). PLoS ONE 2020, 15, e0231532. [Google Scholar] [CrossRef] [PubMed]
- Murgaš, V.; Sačkov, I.; Sedliak, M.; Tunák, D.; Chudý, F. Assessing Horizontal Accuracy of Inventory Plots in Forests with Different Mix of Tree Species Composition and Development Stage. J. For. Sci. 2018, 64, 478–485. [Google Scholar] [CrossRef]
- Pirti, A.; Yucel, M.A. Evaluating Repeatability of RTK (GPS and Galileo/GPS) Performance in the Analysis of Points Located in Areas with and without Obstructions. Rep. Geod. Geoinform. 2022, 113, 11–20. [Google Scholar] [CrossRef]
- Bakula, M.; Pelc-Mieczkowska, R.; Walawski, M. Reliable and Redundant Rtk Positioning for Applications in Hard Observational Conditions. Artif. Satell.-J. Planet. Geod. 2012, 47, 23–33. [Google Scholar] [CrossRef]
- Blair, R.C.; Higgins, J.J. A Comparison of the Power of Wilcoxon’s Rank-Sum Statistic to That of Student’s t Statistic Under Various Nonnormal Distributions. J. Educ. Stat. 1980, 5, 309–335. [Google Scholar] [CrossRef]
- Kaartinen, E.; Dunphy, K.; Sadhu, A. LiDAR-Based Structural Health Monitoring: Applications in Civil Infrastructure Systems. Sensors 2022, 22, 4610. [Google Scholar] [CrossRef]
- Xu, G.; Xu, Y. GPS: Theory, Algorithms and Applications; Springer: Berlin/Heidelberg, Germany, 2016; ISBN 978-3-662-50365-2. [Google Scholar]
- Bakula, M.; Oszczak, S.; Pelc-Mieczkowska, R. Performance of RTK Positioning in Forest Conditions: Case Study. J. Surv. Eng.-ASCE 2009, 135, 125–130. [Google Scholar] [CrossRef]
- Sigrist, P.; Coppin, P.; Hermy, M. Impact of Forest Canopy on Quality and Accuracy of GPS Measurements. Int. J. Remote Sens. 1999, 20, 3595–3610. [Google Scholar] [CrossRef]
- Valbuena, R.; Mauro, F.; Rodriguez-Solano, R.; Manzanera, J.A. Accuracy and precision of GPS receivers under forest canopies in a mountainous environment. Span. J. Agric. Res. 2010, 8, 1047–1057. [Google Scholar] [CrossRef]
- Danskin, S.D.; Bettinger, P.; Jordan, T.R.; Cieszewski, C. A Comparison of GPS Performance in a Southern Hardwood Forest: Exploring Low-Cost Solutions for Forestry Applications. South. J. Appl. For. 2009, 33, 9–16. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Plot | Avg. Slope (Deg) | Stand Age (Years) | Volume (m3/ha) | Canopy Closure (%) | Aspect |
|---|---|---|---|---|---|
| Coniferous (pine) | 15 | 105 | 393 | 80 | S-W |
| Deciduous (beech/oak) | 10 | 110 | 169 | 54 | N-NW |
| Point no. | X (Easting) (m) 1 | Y (Northing) (m) 1 | Z (m) 2 |
|---|---|---|---|
| 1 | 550,791.879 | 468,996.465 | 597.852 |
| 550,791.828 | 468,996.423 | 597.771 | |
| Diff. | 0.051 | 0.042 | 0.081 |
| 2 | 550,772.404 | 550,772.479 | 605.206 |
| 550,909.363 | 550,772.404 | 605.194 | |
| Diff. | 0.041 | 0.075 | 0.012 |
| 7 3 | 550,909.363 | 468,957.217 | 617.306 |
| 550,909.353 | 468,957.209 | 617.268 | |
| Diff. | 0.010 | 0.008 | 0.038 |
| 8 | 550,985.187 | 469,003.180 | 649.158 |
| 550,985.181 | 469,003.165 | 649.151 | |
| Diff. | 0.006 | 0.015 | 0.007 |
| 14 | 551,034.388 | 469,007.828 | 652.018 |
| 551,034.387 | 469,007.824 | 652.005 | |
| Diff. | 0.001 | 0.004 | 0.013 |
| Sample | MAE (m) | Bias (m) | Median Error (m) | Std. Dev. (m) | Min. Error (m) | Max. Error (m) | RMSE (m) |
|---|---|---|---|---|---|---|---|
| Horizontal accuracy | |||||||
| All observations (n = 89) | 1.63 | - | 1.28 | 1.21 | 0.15 | 6.74 | 2.03 |
| Pine observations (n = 24) | 2.07 | - | 2.07 | 1.36 | 0.32 | 5.66 | 2.47 |
| Beech/oak observations (n = 65) | 1.47 | - | 1.21 | 1.12 | 0.15 | 6.74 | 1.84 |
| Vertical accuracy | |||||||
| All observations (n = 89) | 4.01 | 3.96 | 3.47 | 2.82 | −1.46 | 12.80 | 4.85 |
| Pine observations (n = 24) | 4.45 | 4.40 | 3.61 | 2.92 | −1.46 | 12.80 | 5.27 |
| Beech/oak observations (n = 65) | 2.81 | 2.76 | 2.65 | 2.18 | −0.61 | 9.00 | 3.49 |
| Factor | Mean | Median | Std. Dev. | Minimum | Maximum |
|---|---|---|---|---|---|
| Sample: all observations (n = 89) | |||||
| PDOP | 1.92 | 1.77 | 0.52 | 1.27 | 3.58 |
| HDOP | 1.06 | 1.00 | 0.31 | 0.70 | 2.10 |
| VDOP | 1.62 | 1.49 | 0.49 | 1.06 | 3.29 |
| No. of satellites | 13.24 | 13.00 | 2.01 | 8 | 23 |
| Float solutions (out of 30) | 0.91 | 0.00 | 2.63 | 0 | 14 |
| Sample: pine observations (n = 24) | |||||
| PDOP | 1.97 | 1.84 | 0.49 | 1.34 | 3.46 |
| HDOP | 1.17 | 1.10 | 0.38 | 0.70 | 2.10 |
| VDOP | 1.65 | 1.53 | 0.44 | 1.12 | 3.25 |
| No. of satellites | 13.88 | 13.50 | 2.25 | 11 | 23 |
| Float solutions (out of 30) | 1.38 | 0.00 | 3.02 | 0 | 13 |
| Sample: beech/oak observations (n = 65) | |||||
| PDOP | 1.90 | 1.70 | 0.54 | 1.27 | 3.58 |
| HDOP | 1.02 | 0.90 | 0.27 | 0.70 | 2.00 |
| VDOP | 1.61 | 1.41 | 0.51 | 1.06 | 3.29 |
| No. of satellites | 13.00 | 13.00 | 1.87 | 8 | 16 |
| Float solutions (out of 30) | 0.74 | 0.00 | 2.48 | 0 | 14 |
| Radius Considered (Meters) | Avg. no. of Trees | Min. no. of Trees | Max. no. of Trees | Std. Dev. of the no. of Trees |
|---|---|---|---|---|
| 2 | 0.34 | 0 | 4 | 0.64 |
| 4 | 1.71 | 0 | 5 | 1.21 |
| 6 | 4.19 | 0 | 11 | 2.31 |
| 8 | 7.61 | 0 | 16 | 3.66 |
| 10 | 11.99 | 1 | 25 | 5.74 |
| Metric | Sample | Proportion of Variation Explained (%) | Most Important Factors 1 |
|---|---|---|---|
| Horizontal accuracy | All points | 25.45 | NDVI (19%), Species (11%), No. of trees in a 4 m radius (9%), No. of satellites (8%) |
| Vertical accuracy | All points | 27.40 | Slope (22%), Species (19%), No. of satellites (9%), No. of trees in an 8 m radius (9%) |
| Horizontal accuracy | Coniferous | 85.63 | No. of trees in a 4 m radius (18%), Distance to nearest tree (17%), Avg. dist. to trees in a 4 m radius (13%), No. of satellites (8%) |
| Vertical accuracy | Coniferous | 85.60 | No. of trees in a 10 m radius (18%), Slope (14%), No. of Float solutions (12%), No. of trees in an 8 m radius (10%) |
| Horizontal accuracy | Deciduous | 17.62 | No. of satellites (16%), No. of trees in a 10 m radius (15%), No. of trees in an 8 m radius (13%), NDVI (11%) |
| Vertical accuracy | Deciduous | 28.78 | Slope (23%), Avg. dist. to trees in a 4 m radius (15%), NDVI (14%), No. of satellites (8%) |
| Horizontal precision | All points | 39.82 | PDOP (40%), HDOP (20%), No. of satellites (13%), Species (9%) |
| Vertical precision | All points | 45.41 | PDOP (31%), VDOP (29%), No. of satellites (12%), Slope (8%) |
| Horizontal precision | Coniferous | 97.81 | No. of satellites (33%), Slope (11%), No. of trees in an 8 m radius (10%), No. of trees in a 6 m radius (7%) |
| Vertical precision | Coniferous | 85.60 | No. of trees in a 10 m radius (18%), Slope (14%), No. of Float solutions (12%), No. of trees in an 8 m radius (10%) |
| Horizontal precision | Deciduous | 55.65 | PDOP (30%), HDOP (28%), No. of satellites (11%), No. of trees in a 10 m radius (5%) |
| Vertical precision | Deciduous | 28.78 | Slope (23%), Avg. dist. to trees in a 4 m radius (15%), NDVI (14%), Distance to nearest tree (7%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cățeanu, M.; Moroianu, M.A. Performance Evaluation of Real-Time Kinematic Global Navigation Satellite System with Survey-Grade Receivers and Short Observation Times in Forested Areas. Sensors 2024, 24, 6404. https://doi.org/10.3390/s24196404
Cățeanu M, Moroianu MA. Performance Evaluation of Real-Time Kinematic Global Navigation Satellite System with Survey-Grade Receivers and Short Observation Times in Forested Areas. Sensors. 2024; 24(19):6404. https://doi.org/10.3390/s24196404
Chicago/Turabian StyleCățeanu, Mihnea, and Maria Alexandra Moroianu. 2024. "Performance Evaluation of Real-Time Kinematic Global Navigation Satellite System with Survey-Grade Receivers and Short Observation Times in Forested Areas" Sensors 24, no. 19: 6404. https://doi.org/10.3390/s24196404
APA StyleCățeanu, M., & Moroianu, M. A. (2024). Performance Evaluation of Real-Time Kinematic Global Navigation Satellite System with Survey-Grade Receivers and Short Observation Times in Forested Areas. Sensors, 24(19), 6404. https://doi.org/10.3390/s24196404