
A Self-Attention Legendre Graph Convolution Network for Rotating Machinery Fault Diagnosis


Abstract
1. Introduction
- We propose a method for constructing association graphs based on vibration signals, which transforms vibration signals in Euclidean space with translation invariance into graph signals in non-Euclidean space.
- We propose a fast local spectral filter based on Legendre polynomials. Compared to traditional Chebyshev filters used in graph neural networks, it enhances the model’s stability and load adaptability.
- We propose a graph pooling method based on self-attention for fault diagnosis of rotating machinery. This method adaptively focuses on key nodes in the graph to effectively capture fault features, thereby improving the accuracy of fault diagnosis.
2. Fault Diagnosis Model Based on SA-LGCN
2.1. Vibration Signal Association Graph Construction
2.2. Legendre Graph Convolutional Filter
2.3. Graph Pooling
- Node representation learning: First, use Legendre graph convolution to update the feature representation of each node. For each node in the graph, its updated feature representation is .
- Attention score calculation: Calculate the attention score for each node.
- Node selection and pooling: Based on the calculated attention scores, select the most important nodes to retain while removing nodes with lower scores. This process can be accomplished by directly selecting the Top-K nodes based on their scores.
- Constructing the pooled graph: Construct the pooled graph based on the retained nodes and the edge connections from the original graph. This process may also include re-connecting edges or adjusting weights to maintain the coherence and completeness of the graph structure.
3. Experimental Section
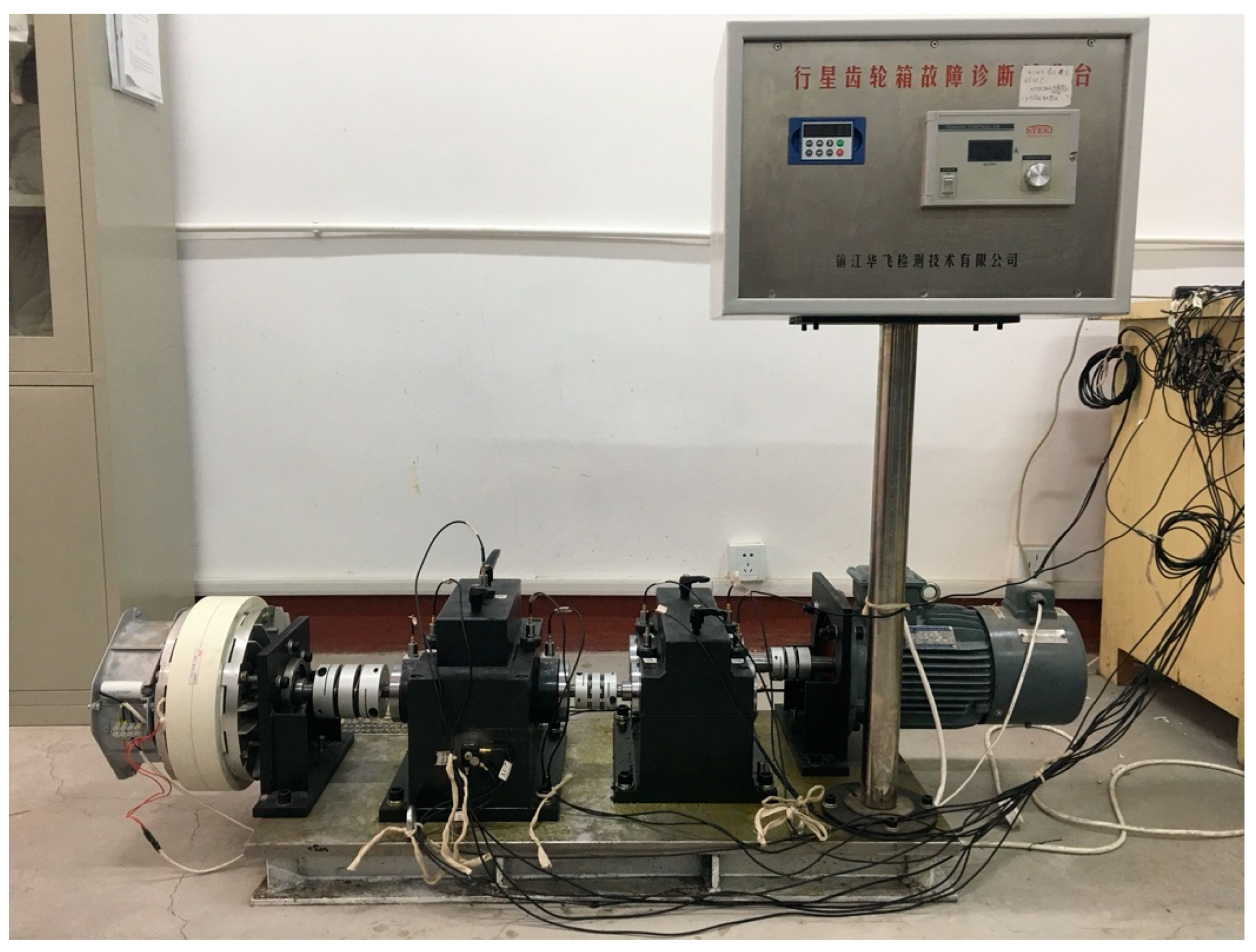
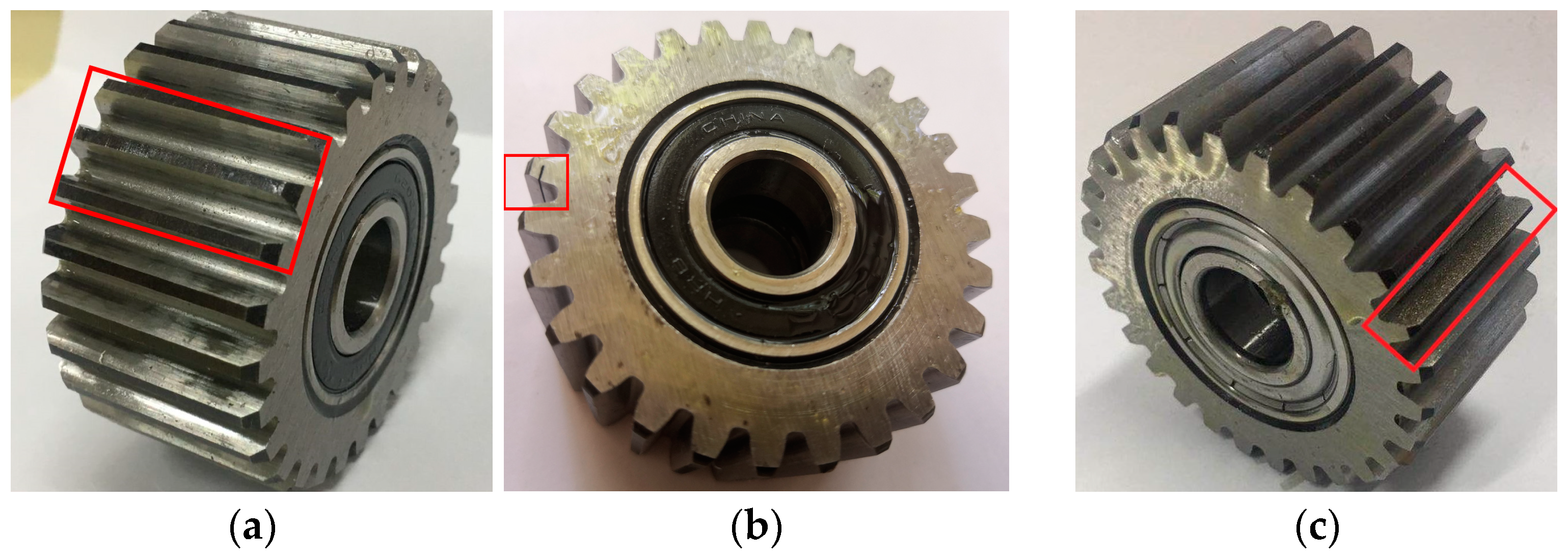
3.1. Dataset Introduction
3.2. Data Preprocessing
3.3. Model Parameter Settings
3.4. Experimental Results and Analysis
3.5. Ablation Study
3.5.1. Experimental Setup
3.5.2. Ablation Experiment Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Chen, X.; Wang, S.; Qiao, B.; Chen, Q. Basic research on machinery fault diagnostics: Past, present, and future trends. Front. Mech. Eng. 2018, 13, 264–291. [Google Scholar] [CrossRef]
- Jia, F.; Lei, Y.; Guo, L.; Lin, J.; Xing, S. A neural network constructed by deep learning technique and its application to intelligent fault diagnosis of machines. Neurocomputing 2018, 272, 619–628. [Google Scholar] [CrossRef]
- Chen, Z.; Gryllias, K.; Li, W. Mechanical fault diagnosis using convolutional neural networks and extreme learning machine. Mech. Syst. Signal Process. 2019, 133, 106272. [Google Scholar] [CrossRef]
- Jia, X.; Qin, N.; Huang, D.; Zhang, Y.; Du, J. A clustered blueprint separable convolutional neural network with high precision for high-speed train bogie fault diagnosis. Neurocomputing 2022, 500, 422–433. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhou, T.; Huang, X.; Cao, L.; Zhou, Q. Fault diagnosis of rotating machinery based on recurrent neural networks. Measurement 2021, 171, 108774. [Google Scholar] [CrossRef]
- Shi, Y.; Deng, A.; Deng, M.; Xu, M.; Liu, Y.; Ding, X. A novel multiscale feature adversarial fusion network for unsupervised cross-domain fault diagnosis. Measurement 2022, 200, 111616. [Google Scholar] [CrossRef]
- Kong, D.; Huang, W.; Zhao, L.; Ding, J.; Wu, H.; Yang, G. Mining knowledge from unlabeled data for fault diagnosis: A multi-task self-supervised approach. Mech. Syst. Signal Process. 2024, 211, 111189. [Google Scholar] [CrossRef]
- Liu, S.; Huang, J.; Ma, J.; Luo, J. Class-incremental continual learning model for plunger pump faults based on weight space meta-representation. Mech. Syst. Signal Process. 2023, 196, 110309. [Google Scholar] [CrossRef]
- Qian, Q.; Qin, Y.; Luo, J.; Wang, Y.; Wu, F. Deep discriminative transfer learning network for cross-machine fault diagnosis. Mech. Syst. Signal Process. 2023, 186, 109884. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, J.; Alippi, C.; Ding, S.X.; Shardt, Y.; Peng, T.; Yang, C. Graph neural network-based fault diagnosis: A review. arXiv 2021, arXiv:2111.08185. [Google Scholar]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Hamilton, W.; Ying, Z.; Leskovec, J. Inductive representation learning on large graphs. Adv. Neural Inf. Process. Syst. 2017, 30, 1025–1035. [Google Scholar]
- Velickovic, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. Stat 2017, 1050, 10-48550. [Google Scholar]
- Xie, G.S.; Liu, J.; Xiong, H.; Shao, L. Scale-aware graph neural network for few-shot semantic segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021; pp. 5475–5484. [Google Scholar]
- Phu, M.T.; Nguyen, T.H. Graph convolutional networks for event causality identification with rich document-level structures. In Proceedings of the 2021 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, Virtual, 6–11 June 2021; pp. 3480–3490. [Google Scholar]
- Ramnath, K.; Sari, L.; Hasegawa-Johnson, M.; Yoo, C. Worldly wise (WoW)-cross-lingual knowledge fusion for fact-based visual spoken-question answering. In Proceedings of the 2021 Conference of the North American Chapter of the Association for Computational Linguistics: Human Language Technologies, Virtual, 6–11 June 2021; pp. 1908–1919. [Google Scholar]
- Li, T.; Zhao, Z.; Sun, C.; Yan, R.; Chen, X. Multireceptive field graph convolutional networks for machine fault diagnosis. IEEE Trans. Ind. Electron. 2020, 68, 12739–12749. [Google Scholar] [CrossRef]
- Chen, Z.; Xu, J.; Peng, T.; Yang, C. Graph convolutional network-based method for fault diagnosis using a hybrid of measurement and prior knowledge. IEEE Trans. Cybern. 2021, 52, 9157–9169. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, J.; Deng, W.; Ding, P.; Zhuang, J.; Liu, Z. Multiscale deep graph convolutional networks for intelligent fault diagnosis of rotor-bearing system under fluctuating working conditions. IEEE Trans. Ind. Inform. 2022, 19, 166–176. [Google Scholar] [CrossRef]
- Yang, G.; Tao, H.; Du, R.; Zhong, Y. Compound fault diagnosis of harmonic drives using deep capsule graph convolutional network. IEEE Trans. Ind. Electron. 2022, 70, 4186–4195. [Google Scholar] [CrossRef]
- Yang, C.; Zhou, K.; Liu, J. SuperGraph: Spatial-temporal graph-based feature extraction for rotating machinery diagnosis. IEEE Trans. Ind. Electron. 2021, 69, 4167–4176. [Google Scholar] [CrossRef]
- Li, Y.; Jian, C.; Zang, G.; Song, C.; Yuan, X. Node classification oriented Adaptive Multichannel Heterogeneous Graph Neural Network. Knowl.-Based Syst. 2024, 292, 111618. [Google Scholar] [CrossRef]
- Chen, J.; Li, B.; He, K. Neighborhood convolutional graph neural network. Knowl.-Based Syst. 2024, 295, 111861. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Z.; Li, X.; Shao, H.; Han, T.; Xie, M. Attention-aware temporal–spatial graph neural network with multi-sensor information fusion for fault diagnosis. Knowl.-Based Syst. 2023, 278, 110891. [Google Scholar] [CrossRef]
- Zhang, Z.; Wu, L. Graph neural network-based bearing fault diagnosis using Granger causality test. Expert Syst. Appl. 2024, 242, 122827. [Google Scholar] [CrossRef]
- Cao, S.; Li, H.; Zhang, K.; Yang, C.; Xiang, W.; Sun, F. A novel spiking graph attention network for intelligent fault diagnosis of planetary gearboxes. IEEE Sens. J. 2023, 23, 13140–13154. [Google Scholar] [CrossRef]
- Yu, Y.; He, Y.; Karimi, H.R.; Gelman, L.; Cetin, A.E. A two-stage importance-aware subgraph convolutional network based on multi-source sensors for cross-domain fault diagnosis. Neural Netw. 2024, 179, 106518. [Google Scholar] [CrossRef]
- Zhong, K.; Han, B.; Han, M.; Chen, H. Hierarchical graph convolutional networks with latent structure learning for mechanical fault diagnosis. IEEE/ASME Trans. Mechatron. 2023, 28, 3076–3086. [Google Scholar] [CrossRef]
- Defferrard, M.; Bresson, X.; Vandergheynst, P. Convolutional neural networks on graphs with fast localized spectral filtering. Adv. Neural Inf. Process. Syst. 2016, 29, 3844–3852. [Google Scholar]
- Ying, Z.; You, J.; Morris, C.; Ren, X.; Hamilton, W.; Leskovec, J. Hierarchical graph representation learning with differentiable pooling. Adv. Neural Inf. Process. Syst. 2018, 31. [Google Scholar]
- Gao, H.; Ji, S. Graph u-nets. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 2083–2092. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Status Label | Fault Location | Fault Description | Motor Speed (Hz) | Load (A) |
|---|---|---|---|---|
| 0 | None | Normal | 20/30/50 | 0.3/0.5 |
| 1 | Gear | Gear pitting | 20/30/50 | 0.3/0.5 |
| 2 | Gear | Gear cracks | 20/30/50 | 0.3/0.5 |
| 3 | Gear | Gear wear (level 1) | 20/30/50 | 0.3/0.5 |
| 4 | Gear | Gear wear (level 2) | 20/30/50 | 0.3/0.5 |
| 5 | Gear | Gear wear (level 3) | 20/30/50 | 0.3/0.5 |
| 6 | Gear | Sun gear broken teeth (level 1) | 20/30/50 | 0.3/0.5 |
| 7 | Gear | Sun gear broken teeth (level 2) | 20/30/50 | 0.3/0.5 |
| 8 | Bearing | Inner race defects | 20/30/50 | 0.3/0.5 |
| 9 | Bearing | Outer race defects | 20/30/50 | 0.3/0.5 |
| Structure | Outputs Size |
|---|---|
| Input | 10 × 1024 × 1024 |
| Legendre graph convolution 1 | 1024 × 1024 |
| Self-attention pool 1 | 1024 |
| Legendre graph convolution 2 | 1024 × 1024 |
| Self-attention pool 2 | 1024 |
| Legendre graph convolution 3 | 1024 × 1024 |
| Self-attention pool 3 | 1024 |
| Fc1 | 1024 × 512 |
| Dropout | 0.2 |
| Fc2 | 512 × C |
| hyper-parameters | Optimizer: Adam the momentum of Adam = 0.9 Batch size = 64 Learning rate = 0.01 Learning rate decays = 1 × 10−5 |
| Model | Accuracy | ||||
|---|---|---|---|---|---|
| 20 Hz + 0.3 A | 20 Hz + 0.5 A | 30 Hz + 0.3 A | 30 Hz + 0.5 A | 50 Hz + 0.5 A | |
| ChebyNet [30] | 93.50% | 90.24% | 89.43% | 86.99% | 96.00% |
| GCN [12] | 64.23% | 68.75% | 56.91% | 58.96% | 61.79% |
| GAT [14] | 91.87% | 86.99% | 90.24% | 92.68% | 86.18% |
| NCGCN [24] | 92.25% | 89.17% | 90.36% | 87.96% | 91.37% |
| HGCN-LSL [29] | 89.75% | 91.85% | 88.37% | 90.71% | 87.62% |
| CNN | 78.05% | 83.74% | 84.55% | 86.18% | 88.62% |
| SA-LGCN | 99.19% | 97.56% | 95.12% | 96.75% | 97.50% |
| Datasets | Baseline | ChebyNet + SAGP | LGCN + Top-K Pool | ChebyNet + Top-K Pool |
|---|---|---|---|---|
| 20 Hz + 0.3 A | 99.19% | 96.56% | 91.87% | 85.87% |
| 20 Hz + 0.5 A | 97.56% | 95.18% | 95.75% | 83.64% |
| 30 Hz + 0.3 A | 95.12% | 92.37% | 93.56% | 86.75% |
| 30 Hz + 0.5 A | 96.75% | 88.62% | 94.93% | 82.37% |
| 50 Hz + 0.5 A | 97.50% | 87.80% | 95.62% | 84.40% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, J.; Huang, J.; Liu, S.; Luo, J.; Jing, L. A Self-Attention Legendre Graph Convolution Network for Rotating Machinery Fault Diagnosis. Sensors 2024, 24, 5475. https://doi.org/10.3390/s24175475
Ma J, Huang J, Liu S, Luo J, Jing L. A Self-Attention Legendre Graph Convolution Network for Rotating Machinery Fault Diagnosis. Sensors. 2024; 24(17):5475. https://doi.org/10.3390/s24175475
Chicago/Turabian StyleMa, Jiancheng, Jinying Huang, Siyuan Liu, Jia Luo, and Licheng Jing. 2024. "A Self-Attention Legendre Graph Convolution Network for Rotating Machinery Fault Diagnosis" Sensors 24, no. 17: 5475. https://doi.org/10.3390/s24175475
APA StyleMa, J., Huang, J., Liu, S., Luo, J., & Jing, L. (2024). A Self-Attention Legendre Graph Convolution Network for Rotating Machinery Fault Diagnosis. Sensors, 24(17), 5475. https://doi.org/10.3390/s24175475