
A Gradient Dynamics-Based Singularity Avoidance Method for Backstepping Control of Underactuated TORA Systems


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
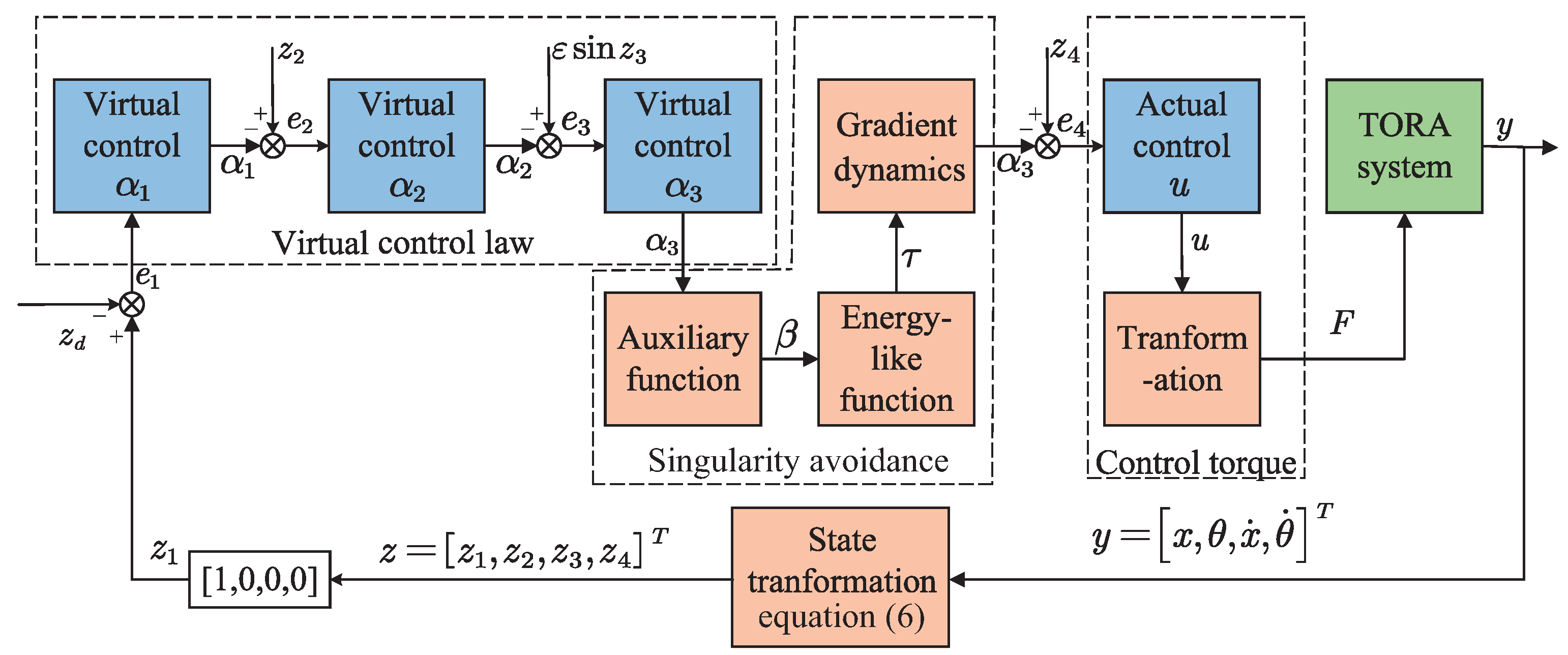
- Different from the previous backstepping methods [43,44,45], this paper considers the singularity problem that may exist in the virtual control design when the ball rotates across the horizontal position, and a novel nonsingular control approach is presented by integrating the backstepping with a created gradient dynamics. To our knowledge, this is the first attempt to systematically design a GD-based backstepping controller for the stabilization of the TORA system.
- (2)
- (3)
2. Dynamic Model of the TORA System
3. Controller Design
3.1. Stabilization Control Law
3.2. Singularity Avoidance Based on Gradient Dynamics
4. Stability Analysis
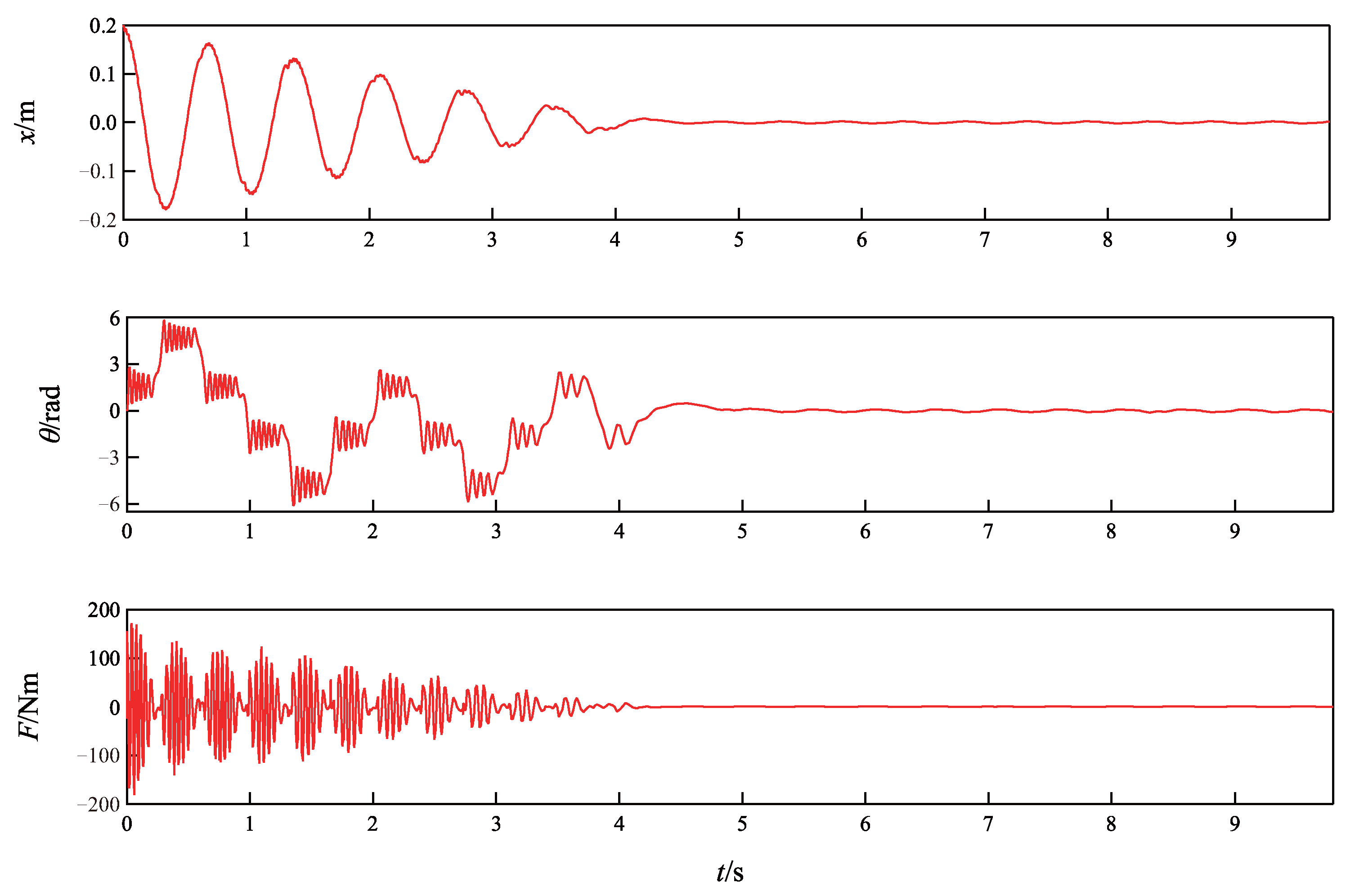
5. Simulation Results
5.1. Comparison Study
5.2. Robustness Test
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, L.; Zhang, H.; Lin, H.; Pan, W. Design and Research of an Underactuated Manipulator Based on the Metamorphic Mechanism. Sensors 2022, 22, 4766. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Liu, X.; Wang, X.; Wang, Y.; Wang, Y. Adaptive prescribed performance tracking control for underactuated unmanned surface ships with input quantization. Intell. Robot. 2024, 4, 146–163. [Google Scholar] [CrossRef]
- Zhang, L.; Deng, C.; Che, W.-W.; An, L. Adaptive backstepping control for nonlinear interconnected systems with prespecified-performance-driven output triggering. Automatica 2023, 154, 111063. [Google Scholar] [CrossRef]
- Ullah, S.; Alghamdi, H.; Algethami, A.A.; Alghamdi, B.; Hafeez, G. Robust Control Design of Under-Actuated Nonlinear Systems: Quadcopter Unmanned Aerial Vehicles with Integral Backstepping Integral Terminal Fractional-Order Sliding Mode. Fractal Fract. 2024, 8, 412. [Google Scholar] [CrossRef]
- Robert, T.B.; Dennis, S.B.; Vincent, T.C. A benchmark problem for nonlinear control design. Int. J. Robust Nonlinear Control 1998, 8, 307–310. [Google Scholar]
- Fradkov, A.; Tomchina, O.; Tomchin, D. Controlled passage through resonance in mechanical systems. J. Sound Vib. 2011, 330, 1065–1073. [Google Scholar] [CrossRef]
- Sun, N.; Wu, Y.M.; Fang, Y.C.; Chen, H. Nonlinear stabilization control of multiple-RTAC systems subject to amplitude-restricted actuating torques using only angular position feedback. IEEE Trans. Ind. Electron. 2017, 64, 3084–3094. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, L.Y.; Cheng, B.W.; Zhang, X. An active mass damper using rotating actuator for structural vibration control. Adv. Mech. Eng. 2016, 8, 1–9. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Gao, B.; Ahmed, N.; Liu, C. Advanced robust control techniques for the stabilization of translational oscillator with rotational actuator based barge-type OFWT. Proc. Inst. Mech. Eng. Part M Eng. Marit. Environ. 2021, 235, 327–343. [Google Scholar] [CrossRef]
- He, M.E.; Hu, Y.Q.; Zhang, Y. Optimization design of tuned mass damper for vibration suppression of a barge-type offshore floating wind turbine. Proc. Inst. Mech. Eng. Part M Eng. Marit. Environ. 2017, 231, 302–315. [Google Scholar] [CrossRef]
- Pan, C.; Cui, C.; Zhou, L.; Xiong, P.; Li, Z. A Model-Free Output Feedback Control Approach for the Stabilization of Underactuated TORA System with Input Saturation. Actuators 2022, 11, 97. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhu, Q. Adaptive Event-Triggered Fuzzy Control for Stochastic Highly Nonlinear Systems With Time Delay and Nontriangular Structure Interconnections. IEEE Trans. Fuzzy Syst. 2024, 32, 27–37. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhu, Q. Adaptive Fuzzy Decentralized Control for Stochastic Nonlinear Interconnected System With Nontriangular Structural Dynamic Uncertainties. IEEE Trans. Fuzzy Syst. 2023, 31, 2593–2604. [Google Scholar] [CrossRef]
- Gao, B.; Ye, F. Fuzzy Lyapunov synthesis control of an underactuated 2D TORA system. J. Intell. Fuzzy Syst. 2015, 28, 581–589. [Google Scholar] [CrossRef]
- Zheng, G.B.; Gao, B.T.; Liu, C.D.; Xie, J.H. Fuzzy control design for periodic dynamic trajectory of TORA system. Control Eng. China 2019, 26, 1029–1034. [Google Scholar]
- Li, Y.; Chen, H.-S.; Hsieh, Y.-H.; Wang, R.-Y. Based on Simulink Simulation of the Fuzzy PID Control for the TORA System. Int. J. Adv. Eng. Res. Sci. 2024, 11. [Google Scholar] [CrossRef]
- Wu, T.B.; Gui, W.H.; Hu, D.; Du, C. Adaptive fuzzy sliding mode control for translational oscillator with rotating actuator: A fuzzy model. IEEE Access 2018, 6, 55861–55869. [Google Scholar] [CrossRef]
- Zhu, Z.; Zhu, Q. Adaptive Neural Network Dynamic Event-Triggered Control for Strong Interconnected Stochastic Nonlinear Systems with Output Constraint. Int. J. Robust Nonlinear Control 2023, 33, 899–918. [Google Scholar] [CrossRef]
- Pham, D.-H.; Vu, V.P. Design Decoupling Control and Wavelet Type-2 Fuzzy Brain Imitated Neural Network (WT2FBINN) for Rotational Actuator (TORA) System. J. Tech. Educ. Sci. 2023, 18, 52–62. [Google Scholar] [CrossRef]
- Quan, Q.; Cai, K.-Y. Repetitive Control for TORA Benchmark: An Additive-State-Decomposition-Based Approach. Int. J. Autom. Comput. 2015, 12, 289–296. [Google Scholar] [CrossRef]
- Wu, X.Q.; Gu, M.M. Adaptive control of the TORA system with partial state constraint. Trans. Inst. Meas. Control 2019, 41, 1172–1177. [Google Scholar] [CrossRef]
- Shah, S.A.A.; Gao, B.; Ahmad, I.; Ullah, H.; Ahmed, N.; Saeed, A. Adaptive Backstepping Integral Sliding Mode Control for 5DOF Barge-Type OFWT under Output Constraint. J. Mar. Sci. Eng. 2023, 11, 492. [Google Scholar] [CrossRef]
- Lu, B.; Fang, Y.; Sun, N. Continuous Sliding Mode Control Strategy for a Class of Nonlinear Underactuated Systems. IEEE Trans. Autom. Control 2018, 63, 3471–3478. [Google Scholar] [CrossRef]
- Wu, X.; Xu, K. Global Sliding Mode Control for the Underactuated Translational Oscillator with Rotational Actuator System. Proc. Inst. Mech. Eng. Part I Syst. Control Eng. 2021, 235, 540–549. [Google Scholar] [CrossRef]
- Wang, L.; Wu, X.; Lei, M. Continuous Sliding Mode Control for the Translational Oscillator with a Rotating Actuator System. Trans. Inst. Meas. Control 2022, 44, 1960–1967. [Google Scholar] [CrossRef]
- Gao, B.T. Dynamic modeling and energy-based control design of TORA. Acta Autom. Sin. 2008, 34, 1221–1224. [Google Scholar] [CrossRef]
- Alleyne, A. Physical Insights on Passivity-Based TORA Control Designs. IEEE Trans. Control Syst. Technol. 1998, 6, 436–439. [Google Scholar] [CrossRef]
- Escobar, G.; Ortega, R.; Sira-Ramrez, H. Output-feedback global stabilization of a nonlinear benchmark system using a saturated passivity-based controller. IEEE Trans. Control Syst. Technol. 1999, 7, 289–293. [Google Scholar] [CrossRef]
- Tadmor, G. Dissipative Design, Lossless Dynamics, and the Nonlinear TORA Benchmark Example. IEEE Trans. Control Syst. Technol. 2001, 9, 391–398. [Google Scholar] [CrossRef]
- Gao, B.; Xu, J.; Zhao, J.; Huang, X. Stabilizing Control of an Underactuated 2-Dimensional TORA with Only Rotor Angle Measurement. Asian J. Control 2013, 15, 1477–1488. [Google Scholar] [CrossRef]
- Wu, X.Q.; Xu, K.X.; Zhang, Y.B. Output-based feedback control of underactuated TORA systems by bounded inputs. Acta Autom. 2020, 46, 200–204, (In Chinese with an English Abstract). [Google Scholar]
- Bupp, R.T.; Bernstein, D.S.; Coppola, V.T. Experimental Implementation of Integrator Backstepping and Passive Nonlinear Controllers on the RTAC Testbed. Int. J. Robust Nonlinear Control 1998, 8, 435–457. [Google Scholar] [CrossRef]
- Olfati-Saber, R. Normal Forms for Underactuated Mechanical Systems with Symmetry. IEEE Trans. Autom. Control 2002, 47, 305–308. [Google Scholar] [CrossRef]
- Xu, R.; Özgüner, Ü. Sliding Mode Control of a Class of Underactuated Systems. Automatica 2008, 44, 233–241. [Google Scholar] [CrossRef]
- Wu, X.; Zhang, Y. Sliding-mode control of the cascade-based translation oscillators with rotating actuator system. Control Theory Apply 2020, 37, 307–315, (In Chinese with an English Abstract). [Google Scholar]
- Guo, W.; Liu, D. Adaptive Second-Order Backstepping Control for a Class of 2DoF Underactuated Systems with Input Saturation and Uncertain Disturbances. Sci. Rep. 2024, 14, 15840. [Google Scholar] [CrossRef] [PubMed]
- Wu, X.; Zhao, Y.; Xu, K. Nonlinear Disturbance Observer Based Sliding Mode Control for a Benchmark System with Uncertain Disturbances. ISA Trans. 2021, 110, 63–70. [Google Scholar] [CrossRef]
- Wang, Y.; Pan, C.; Xiao, J.; Li, Z.; Cui, C. LESO-Based Nonlinear Continuous Robust Stabilization Control of Underactuated TORA Systems. Actuators 2022, 11, 220. [Google Scholar] [CrossRef]
- Zhang, A.; She, J.; Qiu, J.; Yang, C.; Alsaadi, F. A New Control Method for Global Stabilisation of Translational Oscillator with Rotational Actuator. Int. J. Syst. Sci. 2019, 50, 954–960. [Google Scholar] [CrossRef]
- Gutiérrez-Oribio, D.; Mercado-Uribe, J.A.; Moreno, J.A.; Fridman, L. Robust Global Stabilization of a Class of Underactuated Mechanical Systems of Two Degrees of Freedom. Int. J. Robust Nonlinear Control 2021, 31, 3908–3928. [Google Scholar] [CrossRef]
- Rudra, S.; Barai, R.K.; Maitra, M. Block Backstepping Design of Nonlinear State Feedback Control Law for Underactuated Mechanical Systems; Springer: Singapore, 2017; ISBN 978-981-10-1955-5. [Google Scholar]
- Gao, B.T.; Jia, Z.Y.; Chen, H.J.; Zhang, X. Dynamic modeling and backstepping control of TORA. Control Decis. 2007, 22, 1284–1288. [Google Scholar]
- Guo, W.P.; Liu, D.T. Nonlinear dynamic surface control for the underactuated translational oscillator with rotating actuator system. IEEE Access 2019, 7, 11844–11853. [Google Scholar] [CrossRef]
- Guo, W.; Liu, D. Adaptive Neural Network Command Filtered Backstepping Control for the Underactuated TORA System. IEEE Access 2023, 11, 13679–13689. [Google Scholar] [CrossRef]
- Lee, C.H.; Chang, S.K. Experimental implementation of nonlinear TORA system and adaptive backstepping controller design. Neural Comput. Appl. 2012, 21, 785–800. [Google Scholar] [CrossRef]
- Rudra, S.; Barai, R.K.; Maitra, M.; Mandal, D.; Dam, S.; Ghosh, S.; Bhattacharyya, P.; Dutta, A. Design of Nonlinear State Feedback Control Law for Underactuated TORA System: A Block Backstepping Approach. In Proceedings of the 2013 7th International Conference on Intelligent Systems and Control (ISCO), Tamil Nadu, India, 4–5 January 2013; pp. 93–98. [Google Scholar]
- Liu, D.T.; Guo, W.P. Nonlinear backstepping design for the underactuated TORA system. J. Vibroeng. 2014, 16, 552–559. [Google Scholar]
- Zhu, Q.; Wang, H. Output Feedback Stabilization of Stochastic Feedforward Systems with Unknown Control Coefficients and Unknown Output Function. Automatica 2018, 87, 166–175. [Google Scholar] [CrossRef]
- Deng, H.; Krstic, M. Output-Feedback Stochastic Nonlinear Stabilization. IEEE Trans. Autom. Control 1999, 44, 328–333. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C.; Guo, D.; Zheng, J. Comparison on Zhang Neural Dynamics and Gradient-Based Neural Dynamics for Online Solution of Nonlinear Time-Varying Equation. Neural Comput. Appl. 2011, 20, 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Yu, X.; Yin, Y.; Peng, C.; Fan, Z. Singularity-Conquering ZG Controllers of Z2g1 Type for Tracking Control of the IPC System. Int. J. Control 2014, 87, 1729–1746. [Google Scholar] [CrossRef]
- Zhang, Y.; Guo, Y.B.; Li, L.Y.; Zhang, X.H. Nonsingular controller for TORA system based on maximal feedback linearization. Control Decis. 2018, 33, 1415–1421, (In Chinese with an English Abstract). [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, C.; Pu, H.; Li, Z.; Xiao, J. A Gradient Dynamics-Based Singularity Avoidance Method for Backstepping Control of Underactuated TORA Systems. Sensors 2024, 24, 5458. https://doi.org/10.3390/s24175458
Pan C, Pu H, Li Z, Xiao J. A Gradient Dynamics-Based Singularity Avoidance Method for Backstepping Control of Underactuated TORA Systems. Sensors. 2024; 24(17):5458. https://doi.org/10.3390/s24175458
Chicago/Turabian StylePan, Changzhong, Hongsen Pu, Zhijing Li, and Jinsen Xiao. 2024. "A Gradient Dynamics-Based Singularity Avoidance Method for Backstepping Control of Underactuated TORA Systems" Sensors 24, no. 17: 5458. https://doi.org/10.3390/s24175458
APA StylePan, C., Pu, H., Li, Z., & Xiao, J. (2024). A Gradient Dynamics-Based Singularity Avoidance Method for Backstepping Control of Underactuated TORA Systems. Sensors, 24(17), 5458. https://doi.org/10.3390/s24175458