

An Integrated Smart Pond Water Quality Monitoring and Fish Farming Recommendation Aquabot System
 ,
,  , , , ,
, , , ,  and
and
Abstract
1. Introduction
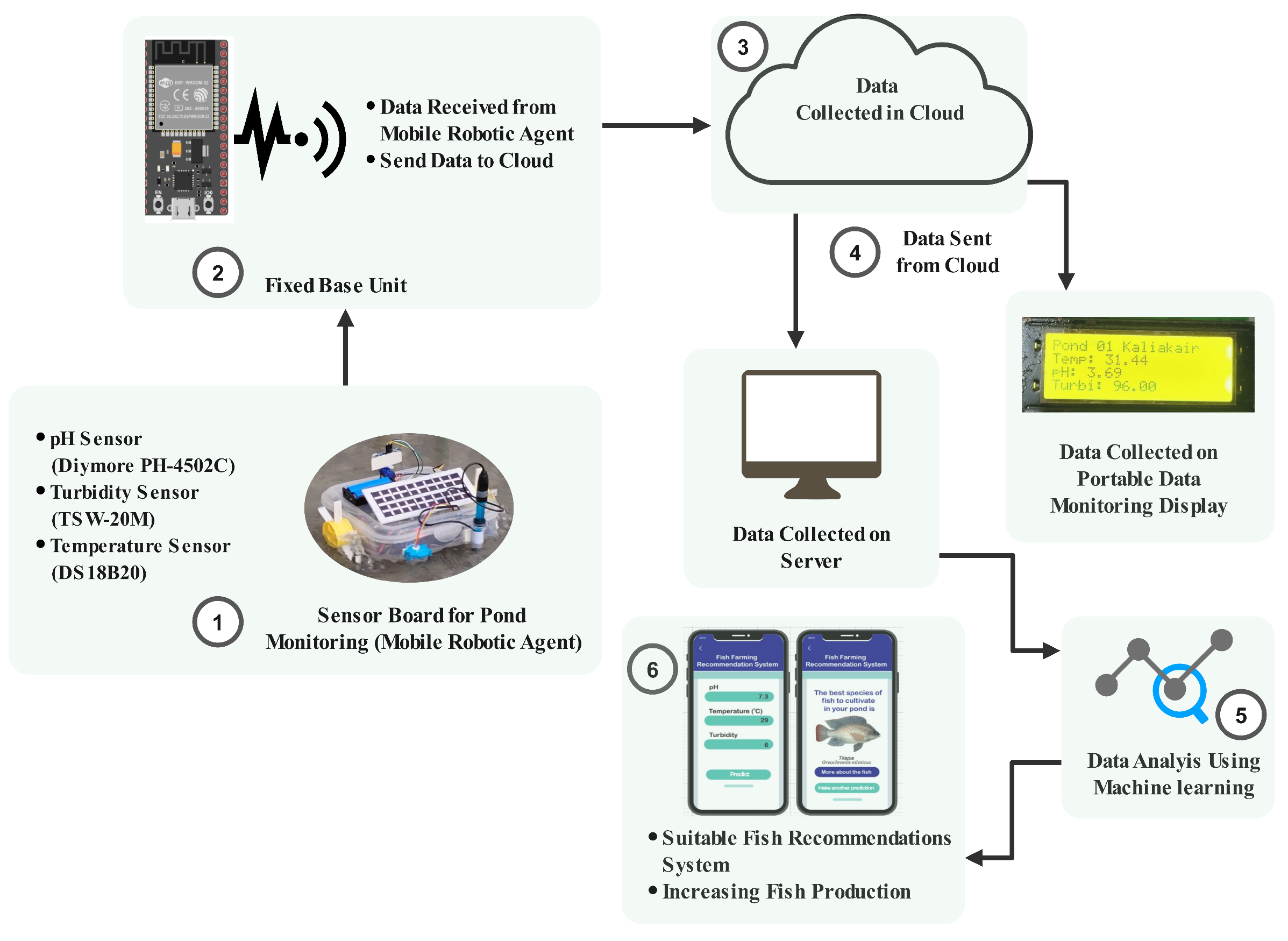
- Development of an IoT-enabled cloud-based water monitoring system that provides real-time water quality data and allows access to these data from any location;
- Implementation of a mobility-based single-sink data gathering approach, enabling the temporal interval sampling of real-time data from sensors;
- Integration of proposed ensemble method to analyze the data stored in a cloud database and generate suggestions for suitable fish species based on the analysis;
- Creation of a user-friendly web interface that enables users from anywhere to identify appropriate fish species based on three factors—temperature, pH, and turbidity;
- Utilization of solar panels as power sources, making the system self-powered, sustainable, cost-effective, and highly autonomous.
2. Literature Review
3. Materials and Methods
3.1. Water Quality Parameters
3.2. Mobile Robotic Agent Design Subsystem
3.3. Data Acquisition, Transmission, and Monitoring Subsystem
3.4. Fish Recommender Subsystem
3.4.1. Dataset Collection
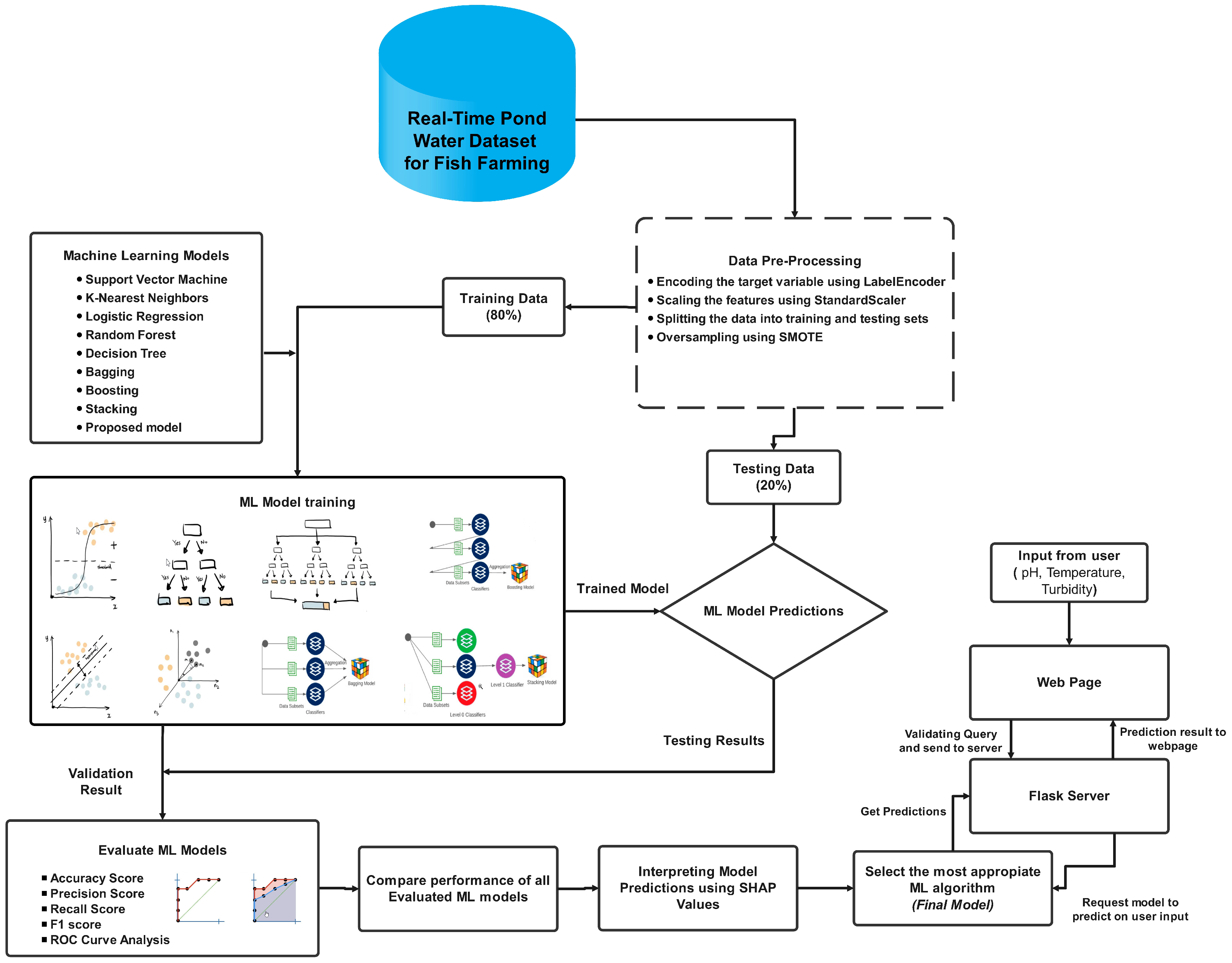
3.4.2. Data Preprocessing
- a:
- Feature Transformation
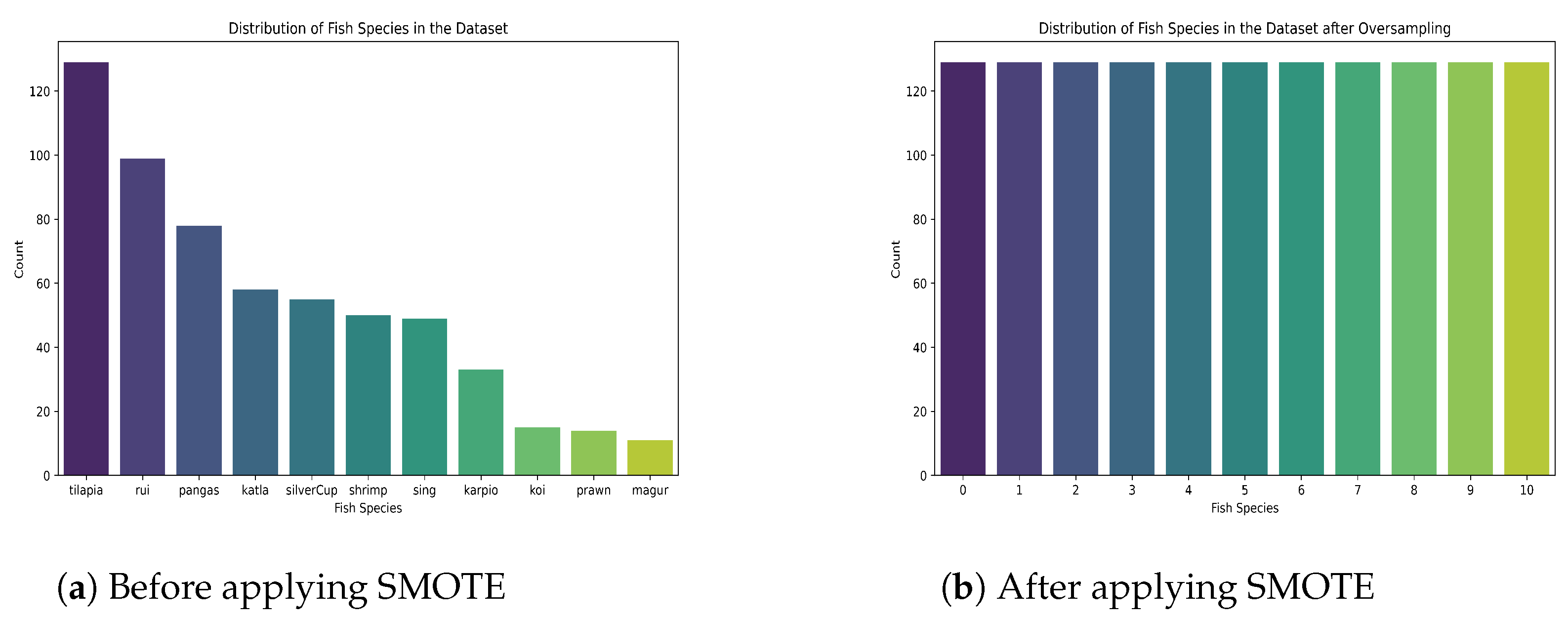
- b:
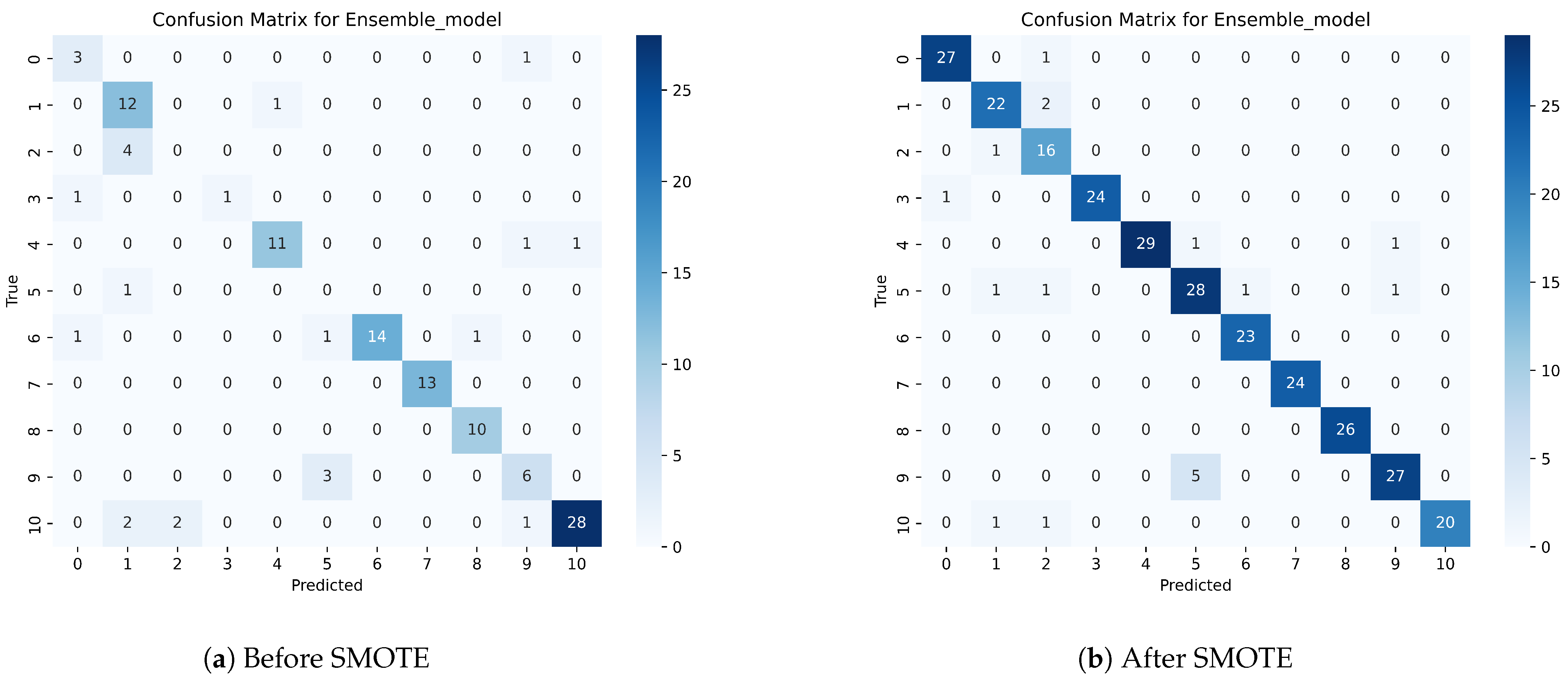
- Solving Class Imbalance Problem
3.4.3. Machine Learning Algorithm
- Random Forest: We built the model using 50 decision trees and 42 random states. The classifier generates a consensus result from the decision trees.
- Support Vector Machine: This model used a C = 10 regularization parameter and a gamma value of 0.1. We also set a random state of 42 for consistency.
- Decision Tree: The maximum depth of the model was set to 5 by us, and we also set a random state of 42.
- K-Nearest Neighbors: In KNN, k = 5 demonstrated better results.
- Bagging: The bagging classifier used the DT as its basis estimator and trained 50 different copies of the model to generate a superior ensemble model with the random state 42.
- Boosting: The AdaBoost classifier utilized the DT as the basic estimator and repeatedly trained many weak models to generate a superior classification model. We have utilized n_estimators 50 and random state 42 for this task.
- Stacking: The stacking classifier integrated numerous estimators (random forest, SVM, decision tree, and KNN) to produce a meta-model that predicted the output of each base estimator. We set the final estimator to the logistic regression classifier.
- Logistic Regression: The model was tuned using GridSearchCV with a parameter grid encompassing penalty terms (L1, L2), regularization strengths (C values), intercept fitting options (fit_intercept), solvers (liblinear, saga), and maximum iterations (max_iter). The optimal configuration was determined through a 5-fold cross-validated search, leveraging parallel processing. The resulting model encapsulated the best hyperparameter set for enhanced predictive performance.
- Proposed Ensemble Model: Our proposed ensemble model combines three ensemble models, bagging, boosting, and stacking. It includes a bagging classifier based on a tuned RF as the base estimator using random state 42; a stacking classifier integrating the tuned RF, tuned DT, tuned AdaBoosting and tuned gradient boosting; and a boosting classifier using the optimized RF. We used the soft voting technique to predict the output by merging bagging, stacking, and boosting. The algorithm of our proposed ensemble model is shown in Algorithm 1.
| Algorithm 1 Proposed Custom Ensemble Method |
|
3.5. Web Interface Design
4. Results
4.1. Performance Evaluation Metrics
4.2. Experimental Design of the Proposed System
4.3. Machine Learning Model Result Comparison
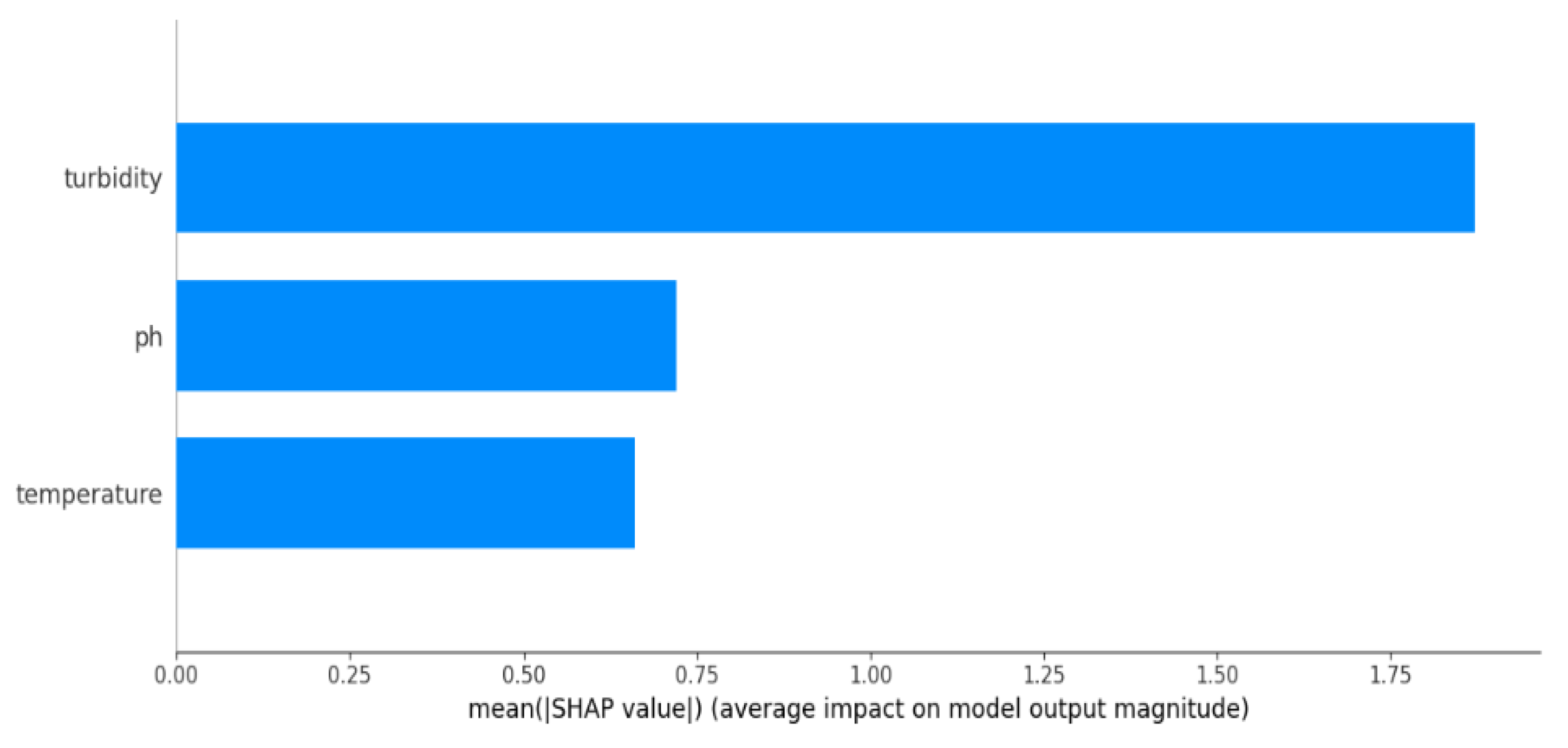
4.4. Result Interpretation of the Models
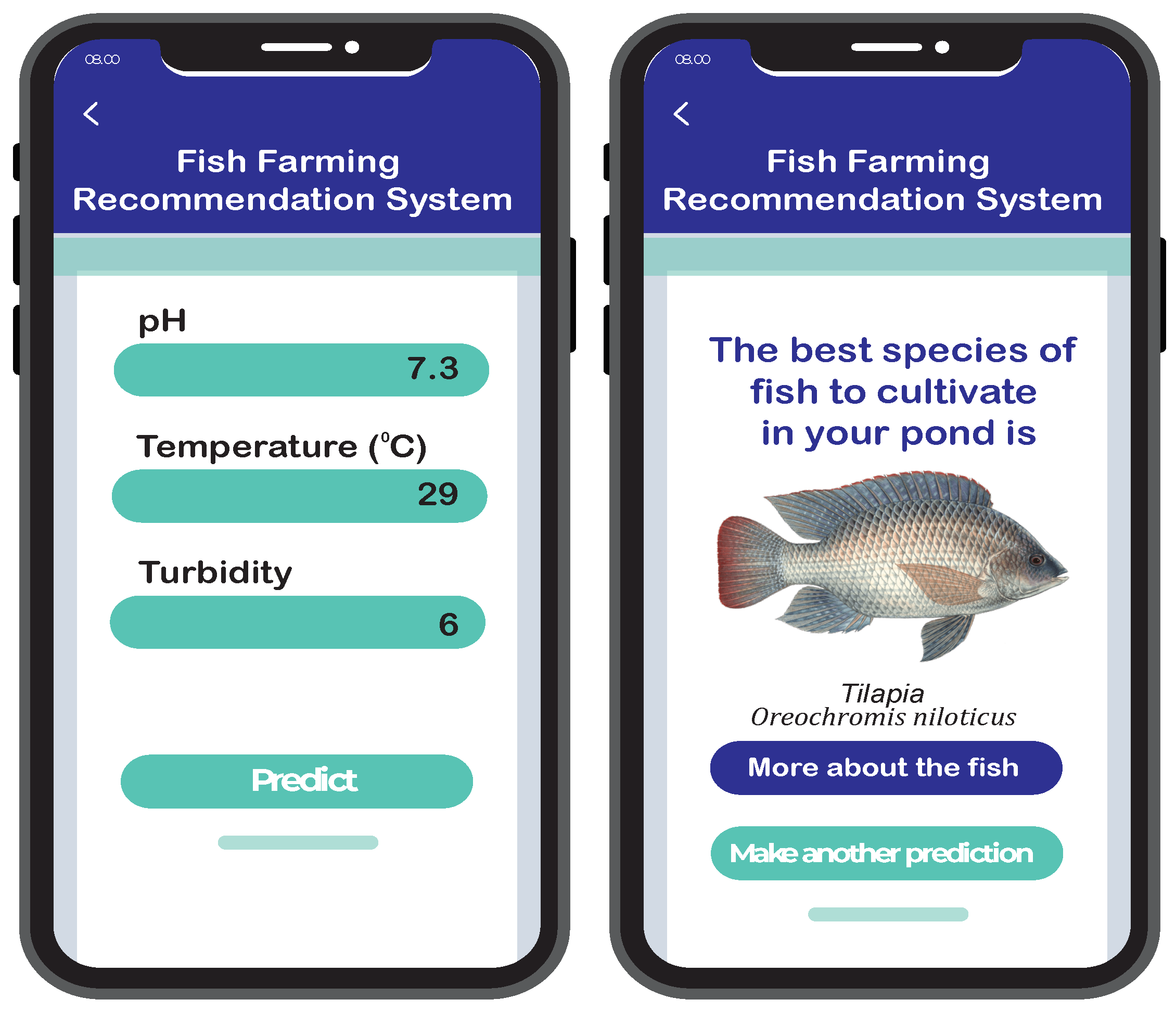
4.5. Fish Recommendation System Web Application
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ahmed, M.; Rahaman, M.O.; Rahman, M.; Abul Kashem, M. Analyzing the Quality of Water and Predicting the Suitability for Fish Farming based on IoT in the Context of Bangladesh. In Proceedings of the 2019 International Conference on Sustainable Technologies for Industry 4.0 (STI), Dhaka, Bangladesh, 24–25 December 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Zulkifli, C.Z.; Garfan, S.; Talal, M.; Alamoodi, A.H.; Alamleh, A.; Ahmaro, I.Y.Y.; Sulaiman, S.; Ibrahim, A.B.; Zaidan, B.B.; Ismail, A.R.; et al. IoT-Based Water Monitoring Systems: A Systematic Review. Water 2022, 14, 3621. [Google Scholar] [CrossRef]
- Lu, H.Y.; Cheng, C.Y.; Cheng, S.C.; Cheng, Y.H.; Lo, W.C.; Jiang, W.L.; Nan, F.H.; Chang, S.H.; Ubina, N.A. A Low-Cost AI Buoy System for Monitoring Water Quality at Offshore Aquaculture Cages. Sensors 2022, 22, 4078. [Google Scholar] [CrossRef] [PubMed]
- Zainuddin, Z.; Idris, R.; Azis, A. Water Quality Monitoring System for Vannamae Shrimp Cultivation Based on Wireless Sensor Network In Taipa, Mappakasunggu District, Takalar. In Proceedings of the First International Conference on Materials Engineering and Management—Engineering Section (ICMEMe 2018), Makassar, Indonesia, 1 August 2018. [Google Scholar] [CrossRef]
- Agossou, B.E.; Toshiro, T. IoT & AI Based System for Fish Farming: Case study of Benin. In Proceedings of the Conference on Information Technology for Social Good, Rome, Italy, 9–11 September 2021; pp. 259–264. [Google Scholar] [CrossRef]
- Chen, C.H.; Wu, Y.C.; Zhang, J.X.; Chen, Y.H. IoT-Based Fish Farm Water Quality Monitoring System. Sensors 2022, 22, 6700. [Google Scholar] [CrossRef] [PubMed]
- Sujito; Mayrawan, D.; Wirawan, I.M.; Aziz, F.S.; Syah, A.I.; Shidiqi, M.A.A. Development Internet of Things for Water Quality Monitoring System for Gouramy Cultivation. In Proceedings of the 4th Forum in Research, Science, and Technology (FIRST-T1-T2-2020), Palembang, Indonesia,, 10–11 November 2020; Atlantis Press: Amsterdam, The Netherlands, 2021; pp. 197–201. [Google Scholar] [CrossRef]
- Budiarti, R.P.N.; Tjahjono, A.; Hariadi, M.; Purnomo, M.H. Development of IoT for Automated Water Quality Monitoring System. In Proceedings of the 2019 International Conference on Computer Science, Information Technology, and Electrical Engineering (ICOMITEE), Jember, Indonesia, 16–17 October 2019; pp. 211–216. [Google Scholar] [CrossRef]
- Vasudevan, S.K.; Baskaran, B. An improved real-time water quality monitoring embedded system with IoT on unmanned surface vehicle. Ecol. Inform. 2021, 65, 101421. [Google Scholar] [CrossRef]
- Raju, K.R.S.R.; Varma, G.H.K. Knowledge Based Real Time Monitoring System for Aquaculture Using IoT. In Proceedings of the 2017 IEEE 7th International Advance Computing Conference (IACC), Hyderabad, India, 5–7 January 2017; pp. 318–321. [Google Scholar] [CrossRef]
- Bai, Q.; Wu, J.; Jin, C. The Water Quality Online Monitoring System Based on Wireless Sensor Network. In Proceedings of the 2020 13th International Symposium on Computational Intelligence and Design (ISCID), Hangzhou, China, 12–13 December 2020; pp. 234–237, ISSN 2473-3547. [Google Scholar] [CrossRef]
- Das, B.; Jain, P. Real-time water quality monitoring system using Internet of Things. In Proceedings of the 2017 International Conference on Computer, Communications and Electronics (Comptelix), Jaipur, India, 1–2 July 2017; pp. 78–82. [Google Scholar]
- Billah, M.M.; Yusof, Z.M.; Kadir, K.; Ali, A.M.M.; Ahmad, I. Quality Maintenance of Fish Farm: Development of Realtime Water Quality Monitoring System. In Proceedings of the 2019 IEEE International Conference on Smart Instrumentation, Measurement and Application (ICSIMA), Kuala Lumpur, Malaysia, 27–29 August 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Cordova-Rozas, M.; Aucapuri-Lecarnaque, J.; Shiguihara-Juarez, P. A Cloud Monitoring System for Aquaculture using IoT. In Proceedings of the 2019 IEEE Sciences and Humanities International Research Conference (SHIRCON), Lima, Peru, 13–15 November 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Gao, G.; Xiao, K.; Chen, M. An intelligent IoT-based control and traceability system to forecast and maintain water quality in freshwater fish farms. Comput. Electron. Agric. 2019, 166, 105013. [Google Scholar] [CrossRef]
- Nagayo, A.M.; Mendoza, C.; Vega, E.; Al Izki, R.K.S.; Jamisola, R.S. An automated solar-powered aquaponics system towards agricultural sustainability in the Sultanate of Oman. In Proceedings of the 2017 IEEE International Conference on Smart Grid and Smart Cities (ICSGSC), Singapore, 23–26 July 2017; pp. 42–49. [Google Scholar] [CrossRef]
- Lin, J.Y.; Tsai, H.L.; Lyu, W.H. An Integrated Wireless Multi-Sensor System for Monitoring the Water Quality of Aquaculture. Sensors 2021, 21, 8179. [Google Scholar] [CrossRef] [PubMed]
- Pasika, S.; Gandla, S.T. Smart water quality monitoring system with cost-effective using IoT. Heliyon 2020, 6, e04096. [Google Scholar] [CrossRef]
- Huan, J.; Li, H.; Wu, F.; Cao, W. Design of water quality monitoring system for aquaculture ponds based on NB-IoT. Aquac. Eng. 2020, 90, 102088. [Google Scholar] [CrossRef]
- Chiu, M.C.; Yan, W.M.; Bhat, S.A.; Huang, N.F. Development of smart aquaculture farm management system using IoT and AI-based surrogate models. J. Agric. Food Res. 2022, 9, 100357. [Google Scholar] [CrossRef]
- Liu, W.; Liu, S.; Hassan, S.G.; Cao, Y.; Xu, L.; Feng, D.; Cao, L.; Chen, W.; Chen, Y.; Guo, J.; et al. A Novel Hybrid Model to Predict Dissolved Oxygen for Efficient Water Quality in Intensive Aquaculture. IEEE Access 2023, 11, 29162–29174. [Google Scholar] [CrossRef]
- Haq, K.P.R.A.; Harigovindan, V.P. Water Quality Prediction for Smart Aquaculture Using Hybrid Deep Learning Models. IEEE Access 2022, 10, 60078–60098. [Google Scholar] [CrossRef]
- Cao, S.; Zhou, L.; Zhang, Z. Prediction of Dissolved Oxygen Content in Aquaculture Based on Clustering and Improved ELM. IEEE Access 2021, 9, 40372–40387. [Google Scholar] [CrossRef]
- Li, D.; Sun, J.; Yang, H.; Wang, X. An Enhanced Naive Bayes Model for Dissolved Oxygen Forecasting in Shellfish Aquaculture. IEEE Access 2020, 8, 217917–217927. [Google Scholar] [CrossRef]
- Niswar, M.; Wainalang, S.; Ilham, A.A.; Zainuddin, Z.; Fujaya, Y.; Muslimin, Z.; Paundu, A.; Kashihara, S.; Fall, D. IoT-based Water Quality Monitoring System for Soft-Shell Crab Farming. In Proceedings of the 2018 IEEE International Conference on Internet of Things and Intelligence System (IOTAIS), Bali, Indonesia, 1–3 November 2018; pp. 6–9. [Google Scholar] [CrossRef]
- Pikulins, D.; Gotlaufs, R.; Solovjova, T.; Aboltins, A.; Grizāns, J.; Migla, S. On the Development of Long-Range Water Quality Monitoring System for Outdoor Aquaculture Objects. Electr. Control Commun. Eng. 2022, 18, 37–42. [Google Scholar] [CrossRef]
- Murad, S.A.Z.; Harun, A.; Mohyar, S.N.; Sapawi, R.; Ten, S.Y. Design of aquaponics water monitoring system using Arduino microcontroller. AIP Conf. Proc. 2017, 1885, 020248. [Google Scholar] [CrossRef]
- Abinaya, T.; Ishwarya, J.; Maheswari, M. A Novel Methodology for Monitoring and Controlling of Water Quality in Aquaculture using Internet of Things (IoT). In Proceedings of the 2019 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, Tamil Nadu, India, 23–25 January 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Islam, M.M.; Kashem, M.A.; Uddin, J. Fish survival prediction in an aquatic environment using random forest model. IAES Int. J. Artif. Intell. IJ-AI 2021, 10, 614. [Google Scholar] [CrossRef]
- Amir, F.; Muchlisin, Z.; Nur, F.; Fadli, N.; Siti-Azizah, M.; Wilkes, M.; Tang, U.; Hasan, B.; Batubara, A.; Kocabas, F.; et al. Effect of increasing water temperature on the physiology and gill histology of Barramundi, Lates calcarifer (Pisces, Perciformes) fingerlings. Int. Aquat. Res. 2022, 14, 263–273. [Google Scholar] [CrossRef]
- Islam, M.M.; Kashem, M.A.; Uddin, J. An internet of things framework for real-time aquatic environment monitoring using an Arduino and sensors. Int. J. Electr. Comput. Eng. IJECE 2022, 12, 826–833. [Google Scholar] [CrossRef]
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic Minority Over-sampling Technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]
- Shi, B.; Sreeram, V.; Zhao, D.; Duan, S.; Jiang, J. A wireless sensor network-based monitoring system for freshwater fishpond aquaculture. Biosyst. Eng. 2018, 172, 57–66. [Google Scholar] [CrossRef]
- Galido, E.; Tolentino, L.K.; Fortaleza, B.; Corvera, R.; Guzman, A.; Española, V.; Gambota, C.; Gungon, A.; Lapuz, K.; Arago, N.; et al. Development of a Solar-powered Smart Aquaponics System through Internet of Things (IoT). In Lecture Notes on Research and Innovation in Computer Engineering and Computer Sciences; Springer: Berlin/Heidelberg, Germany, 2019; pp. 31–39. [Google Scholar]
- Ismail, R.; Shafinah, K.; Latif, K. A Proposed Model of Fishpond Water Quality Measurement and Monitoring System based on Internet of Things (IoT). IOP Conf. Ser. Earth Environ. Sci. 2020, 494, 012016. [Google Scholar] [CrossRef]
- Islam, M.M.; Kashem, M.A.; Jui, F.I. Aqua Fishing Monitoring System Using IoT Devices. Int. J. Innov. Sci. Eng. Technol. IJISET 2019, 6, 109–114. [Google Scholar]
- Angani, A.; Lee, J.C.; Shin, K.J. Vertical Recycling Aquatic System for Internet-of-Things-based Smart Fish Farm. Sens. Mater. 2019, 31, 3987. [Google Scholar] [CrossRef]
- Sukrismon, Y.; Aripriharta; Hidayatullah, N.; Mufti, N.; Handayani, A.N.; Horng, G.J. Smart Fish Pond for Economic Growing in Catfish Farming. In Proceedings of the 2019 International Conference on Computer Science, Information Technology, and Electrical Engineering (ICOMITEE), Jember, Indonesia, 16–17 October 2019; pp. 49–53. [Google Scholar] [CrossRef]
- Muhammad Masum, A.K.; Shahin, M.; Amzad Chy, M.K.; Islam Khan, S.; Shan-A-Alahi, A.; Rabiul Alam, M.G. Design and Implementation of IoT based Ideal Fish Farm in the Context of Bangladesh Aquaculture System. In Proceedings of the 2019 1st International Conference on Advances in Science, Engineering and Robotics Technology (ICASERT), Dhaka, Bangladesh, 3–5 May 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Teja, K.B.R.; Monika, M.; Chandravathi, C.; Kodali, P. Smart Monitoring System for Pond Management and Automation in Aquaculture. In Proceedings of the 2020 International Conference on Communication and Signal Processing (ICCSP), Chennai, India, 28–30 July 2020; pp. 204–208. [Google Scholar] [CrossRef]
- Ramadani, M.E.; Raafi’u, B.; Mursid, M.; Ash-Shiddieqy, R.H.; Zain, A.T.; Fauzan lAdziimaa, A. Design and Development of Monitoring System on Carp Farming Ponds as IoT-Based Water Quality Control. In Proceedings of the 2021 3rd International Conference on Research and Academic Community Services (ICRACOS), Surabaya, Indonesia, 9–10 October 2021; pp. 148–153. [Google Scholar] [CrossRef]
- Chen, J.H.; Sung, W.T.; Lin, G.Y. Automated Monitoring System for the Fish Farm Aquaculture Environment. In Proceedings of the 2015 IEEE International Conference on Systems, Man, and Cybernetics, Kowloon Tong, Hong Kong, 9–12 October 2015; pp. 1161–1166. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Water Quality Parameter | Value |
|---|---|
| Temperature | 25 °C–32 °C or >20 °C |
| pH | 6.5–8.5 |
| Turbidity | 30–80 cm |
| Dissolved Oxygen (DO) | >5 mg/L |
| Biochemical Organic Demand (BOD) | <5 mg/L |
| Total Dissolved Solids (TDS) | 400 mg/L |
| Chemical Oxygen Demand (COD) | 20–30 mg/L |
| Total Suspended Solids (TSS) | <80 mg/L |
| Electrical Conductivity (EC) | 150–50 micros/cm |
| Hardness | >15 mg/L |
| Alkalinity | 50–300 mg/L |
| Nitrite NO2 | <0.2 |
| Nitrate NO3 | 0–100 |
| Total Ammonia Nitrogen (TAN) | 0–0.2 |
| Class Label | Tilapia | Rui | Pangas | Katla | Silver Cup | Shrimp | Sing | Karpio | Koi | Prawn | Magur |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Number | 129 | 99 | 78 | 58 | 55 | 50 | 49 | 33 | 15 | 14 | 11 |
| Without SMOTE | After SMOTE | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Acc | Pre | Rec | F1 | MCC | TS | Acc | Pre | Rec | F1 | MCC | TS | |
| Ensemble Model | 0.83 | 0.86 | 0.83 | 0.84 | 0.81 | 1.22476 | 0.94 | 0.94 | 0.94 | 0.94 | 0.93 | 1.40498 |
| RF | 0.85 | 0.88 | 0.85 | 0.86 | 0.83 | 0.12609 | 0.93 | 0.94 | 0.93 | 0.93 | 0.93 | 0.01370 |
| SVM | 0.45 | 0.55 | 0.45 | 0.45 | 0.37 | 0.18323 | 0.64 | 0.63 | 0.64 | 0.6 | 0.62 | 0.01291 |
| DT | 0.71 | 0.78 | 0.71 | 0.72 | 0.68 | 0.00371 | 0.82 | 0.84 | 0.82 | 0.81 | 0.80 | 0.00020 |
| KNN | 0.66 | 0.74 | 0.66 | 0.68 | 0.61 | 0.02989 | 0.88 | 0.89 | 0.88 | 0.88 | 0.87 | 0.01352 |
| LR | 0.38 | 0.35 | 0.38 | 0.34 | 0.80 | 0.0196 | 0.51 | 0.49 | 0.51 | 0.49 | 0.91 | 0.00039 |
| Bagging | 0.82 | 0.85 | 0.82 | 0.83 | 0.79 | 0.16518 | 0.93 | 0.93 | 0.93 | 0.93 | 0.92 | 0.47181 |
| Boosting | 0.82 | 0.84 | 0.82 | 0.82 | 0.80 | 0.18795 | 0.93 | 0.93 | 0.93 | 0.93 | 0.92 | 0.50629 |
| Stacking | 0.82 | 0.81 | 0.82 | 0.81 | 0.27 | 0.69595 | 0.93 | 0.93 | 0.93 | 0.93 | 0.47 | 0.04793 |
| Refs. | Number of Sensors Used | Parameters Considered <pH, Temperature, Turbidity> <yes/no, yes/no, yes/no> | Solar Power | Data Collection Robot | Cloud Platform | Fish Recommender | Productivity Concern | Cost–Benefit Concern |
|---|---|---|---|---|---|---|---|---|
| [10] | 4 | yes, yes, no | yes | no | yes | no | yes | no |
| [33] | 5 | yes, yes, yes | no | no | no | no | yes | yes |
| [25] | 4 | yes, yes, no | yes | no | yes | no | no | yes |
| [34] | 4 | yes, yes, no | yes | no | no | no | yes | yes |
| [13] | 4 | yes, yes, no | no | no | yes | no | no | no |
| [36] | 4 | yes, yes, yes | no | no | yes | no | yes | no |
| [35] | 4 | yes, yes, no | no | no | yes | no | yes | yes |
| [17] | 4 | yes, yes, no | no | no | yes | no | yes | yes |
| [9] | 5 | yes, yes, yes | no | no | yes | no | no | yes |
| [37] | 2 | yes, yes, yes | yes | no | yes | no | yes | yes |
| [38] | 2 | yes, yes, no | yes | no | yes | no | yes | no |
| [39] | 2 | yes, yes, no | no | no | yes | no | yes | yes |
| [40] | 2 | yes, yes, no | no | no | yes | no | no | no |
| [41] | 2 | yes, yes, no | no | no | yes | no | yes | yes |
| [42] | 3 | yes, yes, yes | no | no | yes | no | yes | yes |
| [29] | 2 | yes, yes, no | no | no | yes | no | yes | yes |
| [6] | 2 | yes, yes, no | no | no | yes | no | yes | no |
| Proposed System | 3 | yes, yes, yes | yes | yes | yes | yes | yes | yes |
| Reference | Utilized Model | Best Model | Tools | Preprocessing: Feature Scaling, SMOTE | Performance Metric | Best Model Accuracy |
|---|---|---|---|---|---|---|
| Islam et al. [29] | RF, J48, NB, KNN, CART | RF | Weka | No | Accuracy, Kappa, TPR | 88.48 |
| Proposed | Ensemble, RF, DT, NB, KNN, SVM, LR, Bagging, Boosting, Stacking | Ensemble | Google Colab | Yes | Accuracy, Precision, Recall, F1-score, ROC AUC | 94 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hemal, M.M.; Rahman, A.; Nurjahan; Islam, F.; Ahmed, S.; Kaiser, M.S.; Ahmed, M.R. An Integrated Smart Pond Water Quality Monitoring and Fish Farming Recommendation Aquabot System. Sensors 2024, 24, 3682. https://doi.org/10.3390/s24113682
Hemal MM, Rahman A, Nurjahan, Islam F, Ahmed S, Kaiser MS, Ahmed MR. An Integrated Smart Pond Water Quality Monitoring and Fish Farming Recommendation Aquabot System. Sensors. 2024; 24(11):3682. https://doi.org/10.3390/s24113682
Chicago/Turabian StyleHemal, Md. Moniruzzaman, Atiqur Rahman, Nurjahan, Farhana Islam, Samsuddin Ahmed, M. Shamim Kaiser, and Muhammad Raisuddin Ahmed. 2024. "An Integrated Smart Pond Water Quality Monitoring and Fish Farming Recommendation Aquabot System" Sensors 24, no. 11: 3682. https://doi.org/10.3390/s24113682
APA StyleHemal, M. M., Rahman, A., Nurjahan, Islam, F., Ahmed, S., Kaiser, M. S., & Ahmed, M. R. (2024). An Integrated Smart Pond Water Quality Monitoring and Fish Farming Recommendation Aquabot System. Sensors, 24(11), 3682. https://doi.org/10.3390/s24113682