
An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering

Abstract
1. Introduction
2. Modeling of Signal and Task
3. Interference Mitigation Method
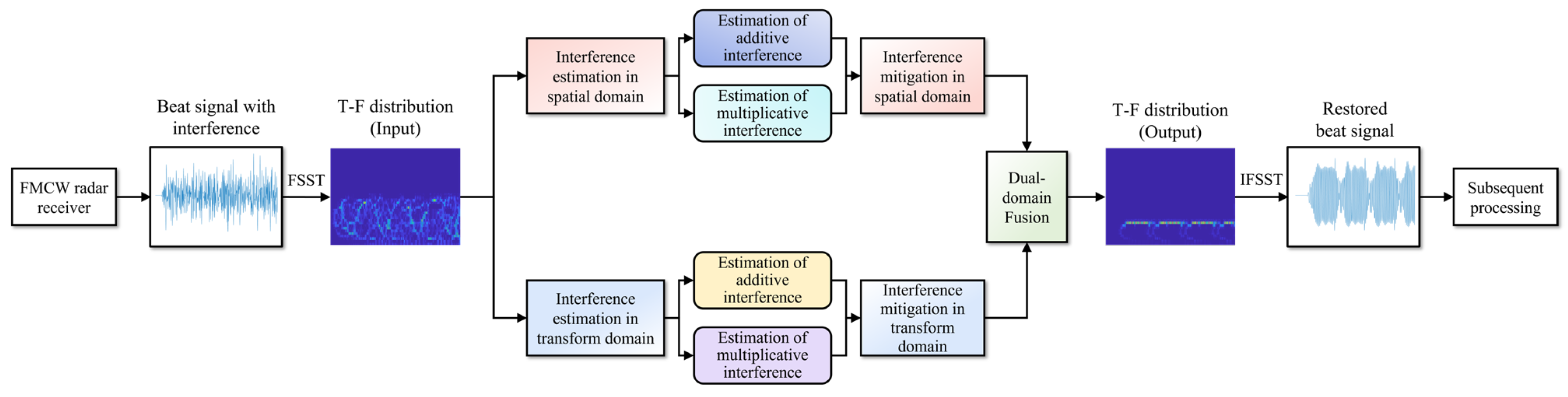
3.1. Interference Mitigation Procedure
- (1)
- Perform time–frequency transform on the beat signal to obtain the time–frequency distribution, which includes the real-valued coefficient matrix and the imaginary-valued coefficient matrix. The time–frequency transform is implemented using the Fourier synchrosqueezed transform (FSST), with the rationale provided in Section 3.2;
- (2)
- Apply the filtering algorithm proposed in Section 3.3 to the real-valued and imaginary-valued coefficient matrices of time–frequency distribution, respectively, to filter out the interference signal components contained in the two matrices and restore the strength of the target echo signal components;
- (3)
- Apply the inverse FSST to the filtered results to convert the beat signal from the time–frequency domain back to the time domain and send it to the subsequent signal processing stages to complete the extraction of target information;
3.2. Implement Approach of Time–Frequency Analysis
3.3. Filtering Algorithm for Time–Frequency Distribution
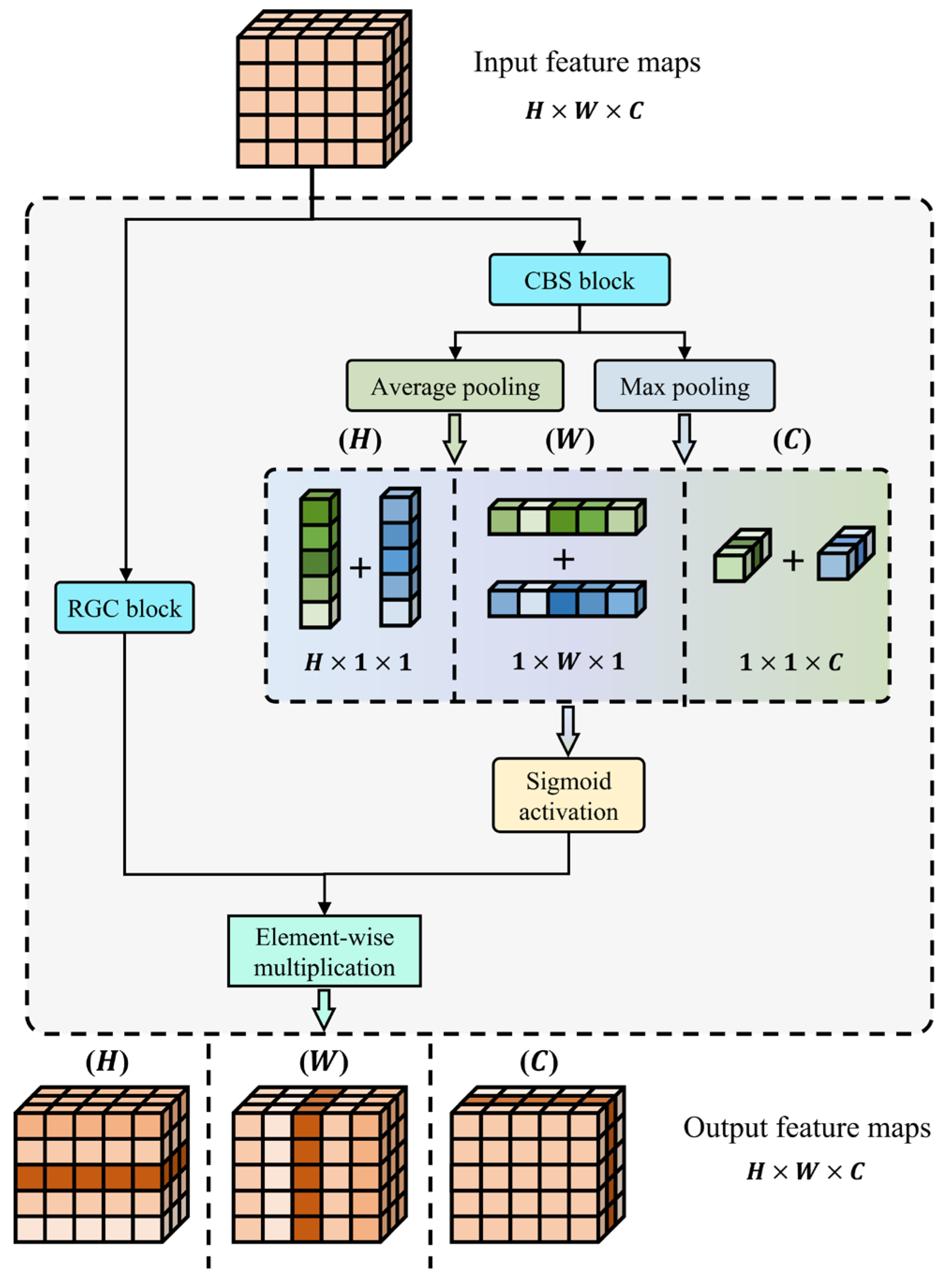
3.3.1. Spatial Domain-Based Interference Estimate and Mitigation
- (1)
- Overall Structure
- (2)
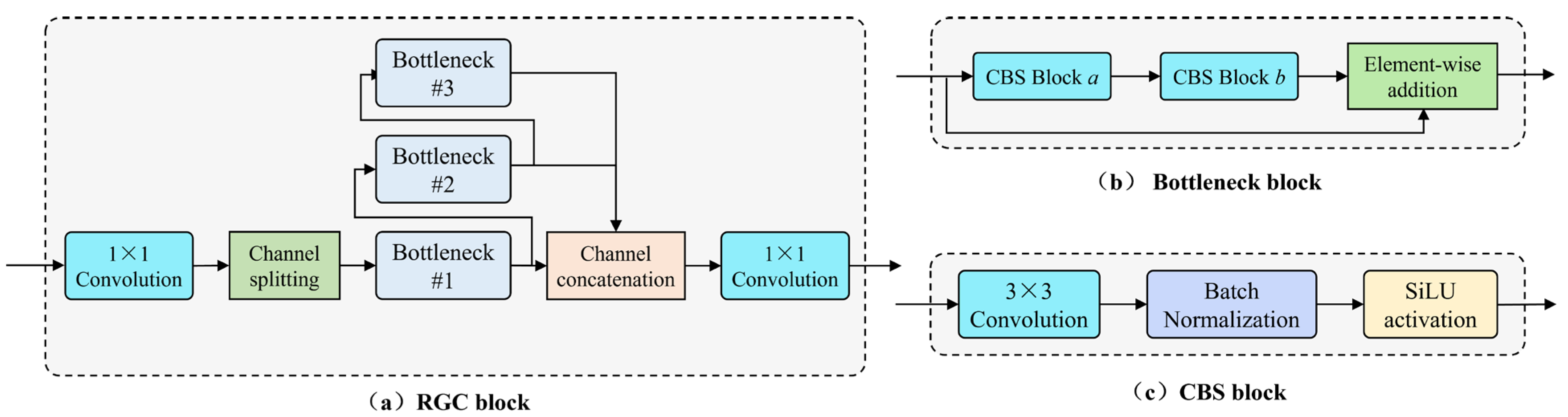
- RGC Module
- (3)
- Dimensional Attention Mechanism
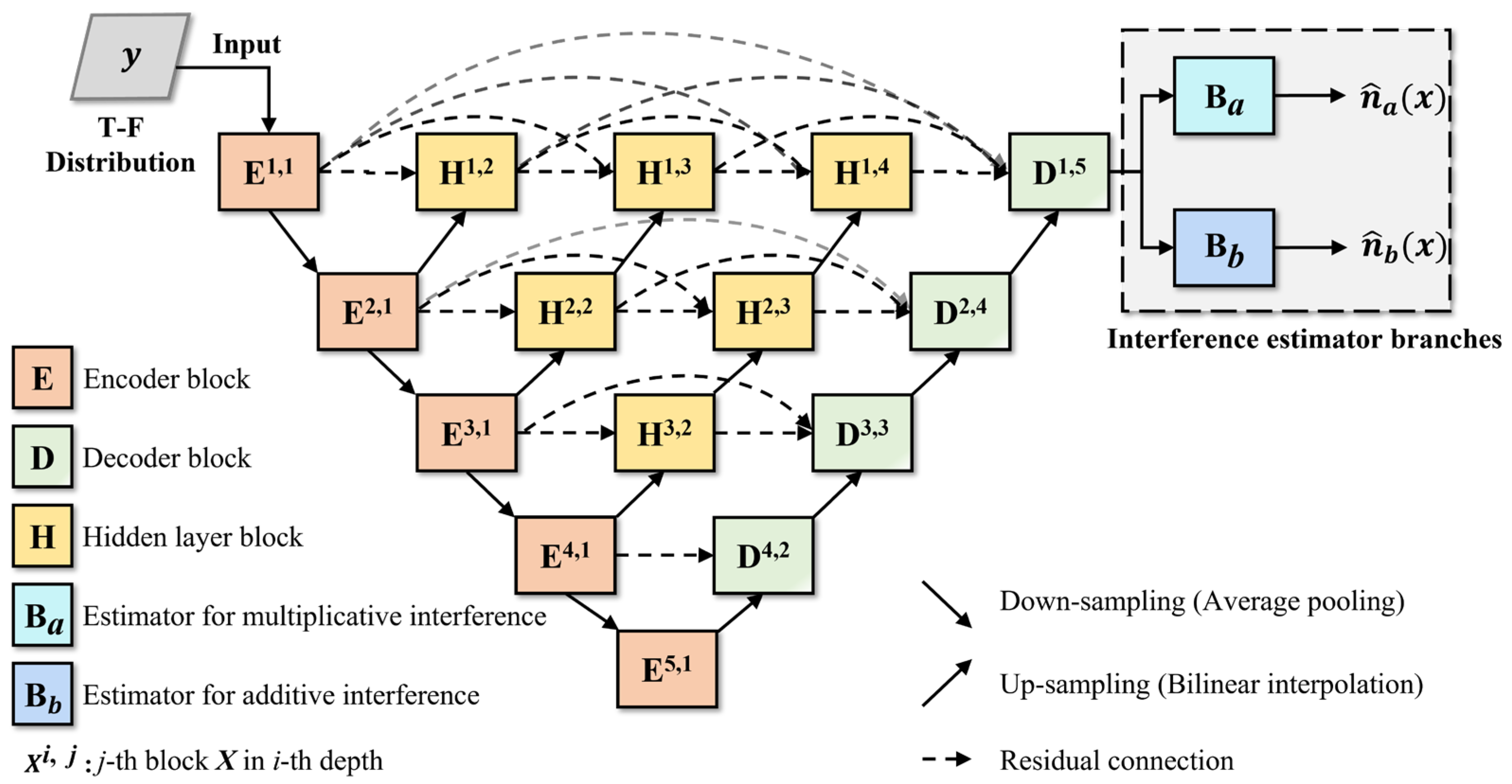
3.3.2. Transform Domain-Based Interference Estimate and Mitigation
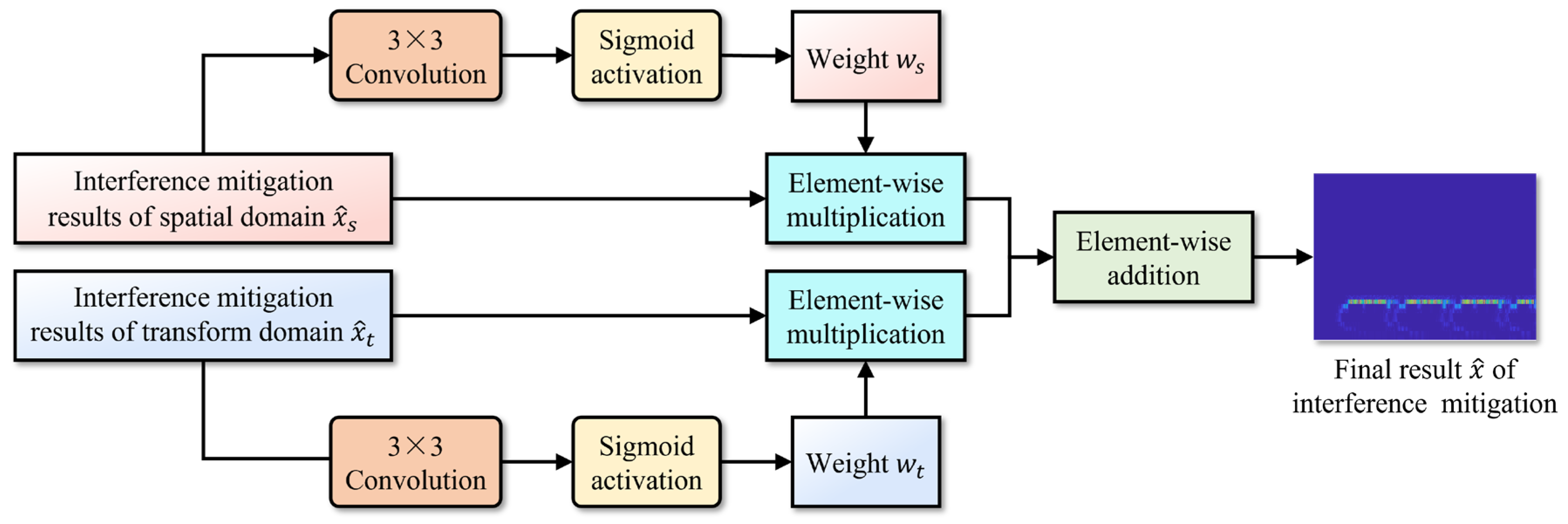
3.3.3. Dual-Domain Fusion Interference Mitigation
4. Simulation Experiment
4.1. Configurations of Model Structure and Model Training
- (1)
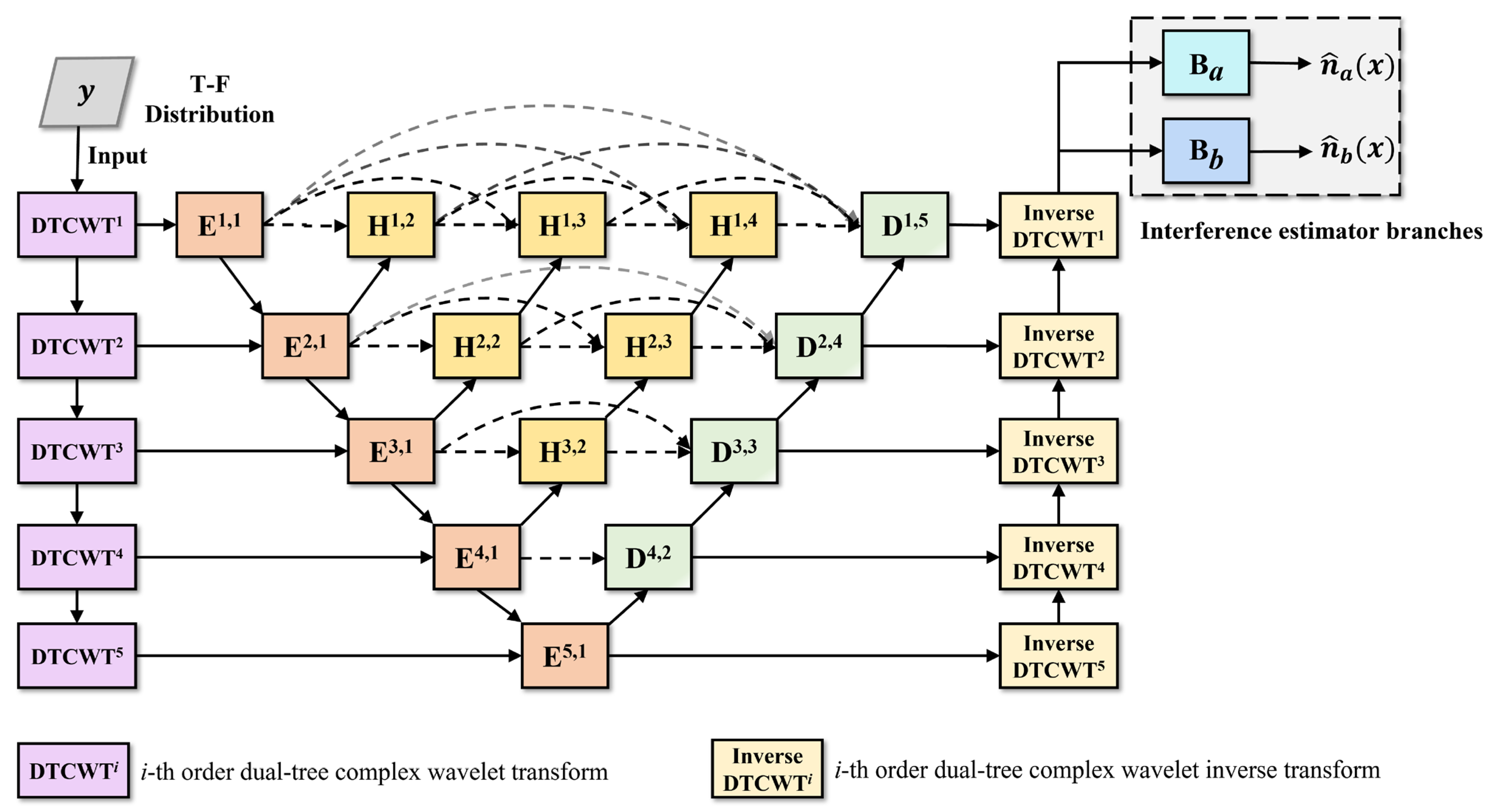
- For the UNet++ structure, serving as the interference estimation module in both domains, its layer depth is set to 5, with the number of feature map channels used for feature extraction in the first to fifth level layer being 4, 16, 32, 64, and 64, respectively;
- (2)
- The outputs of the interference estimator branches in both domains, namely the additive and multiplicative interference component estimates, are all 1-channel feature maps.
4.2. Datasets and Preparation Details
- (1)
- Synthesize LFM signals through simulation to serve as the FMCW radar transmission signals, with certain phase delay forms set as the target echo signals;
- (2)
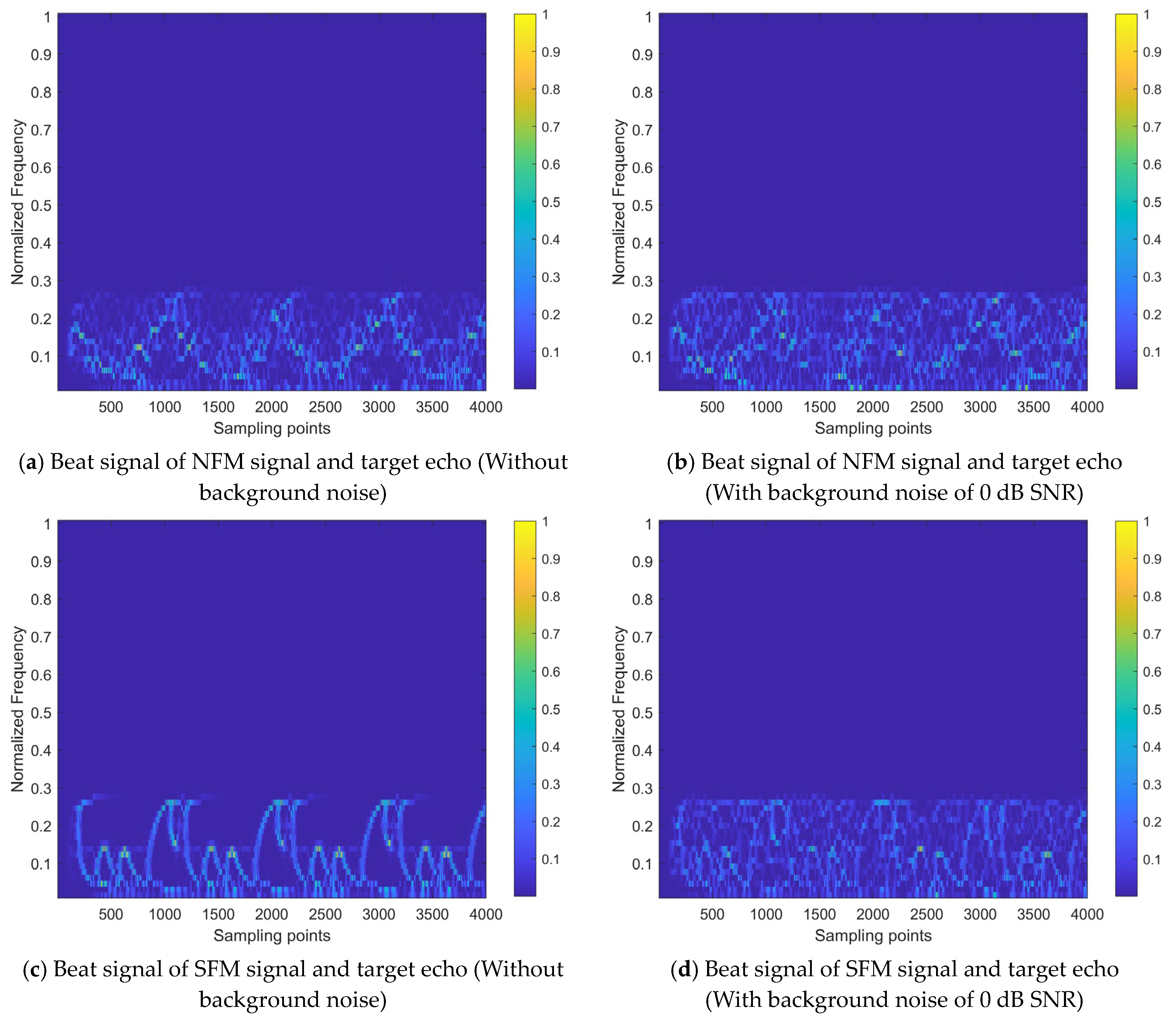
- Synthesize interference signals by simulation, including NFM signal, SFM signal, and swept-frequency signal;
- (3)
- Superimpose each type of interference signal onto the target echo signal;
- (4)
- Add broadband Gaussian white noise to simulate background noise, then obtain the received signals for FMCW radar;
- (5)
- The received signals are mixed with a local reference signal and then low-pass filtered to obtain the beat signal;
- (6)
- Perform the time–frequency transform of FSST for the beat signal and obtain the corresponding time–frequency distribution image samples. Among these, samples that contain only the target echo serve as the ground truth for model training and evaluation, while samples with various interferences and noise are used as the input for the proposed algorithm.
4.3. Computational Complexity Evaluation
4.4. Performance Evaluation Metrics
4.4.1. Evaluation of Image Restoration
4.4.2. Evaluation of Time–Frequency Energy Aggregation Degree
4.4.3. Evaluation of Signal Quality
5. Results
5.1. Ablation Experiments
- (1)
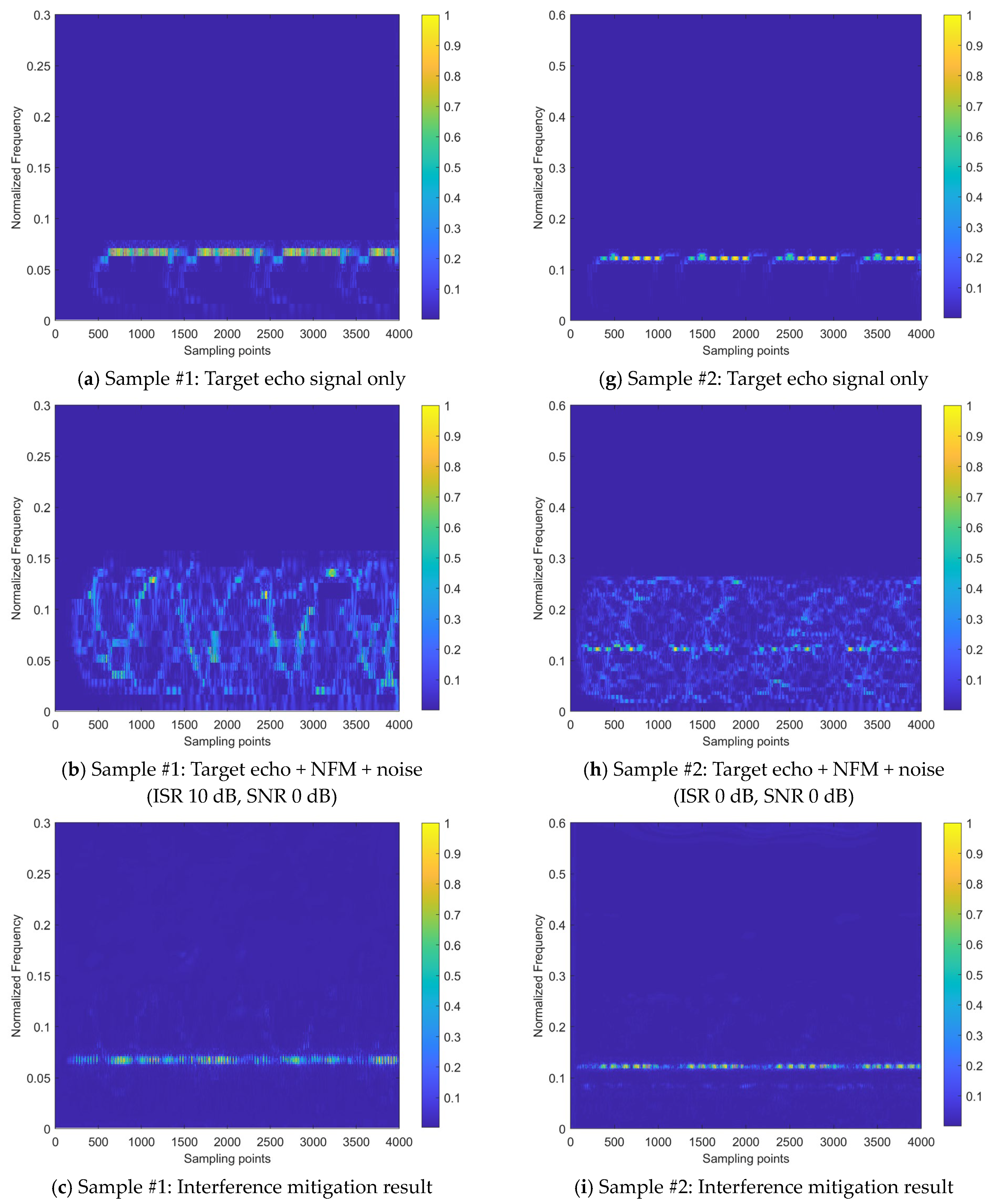
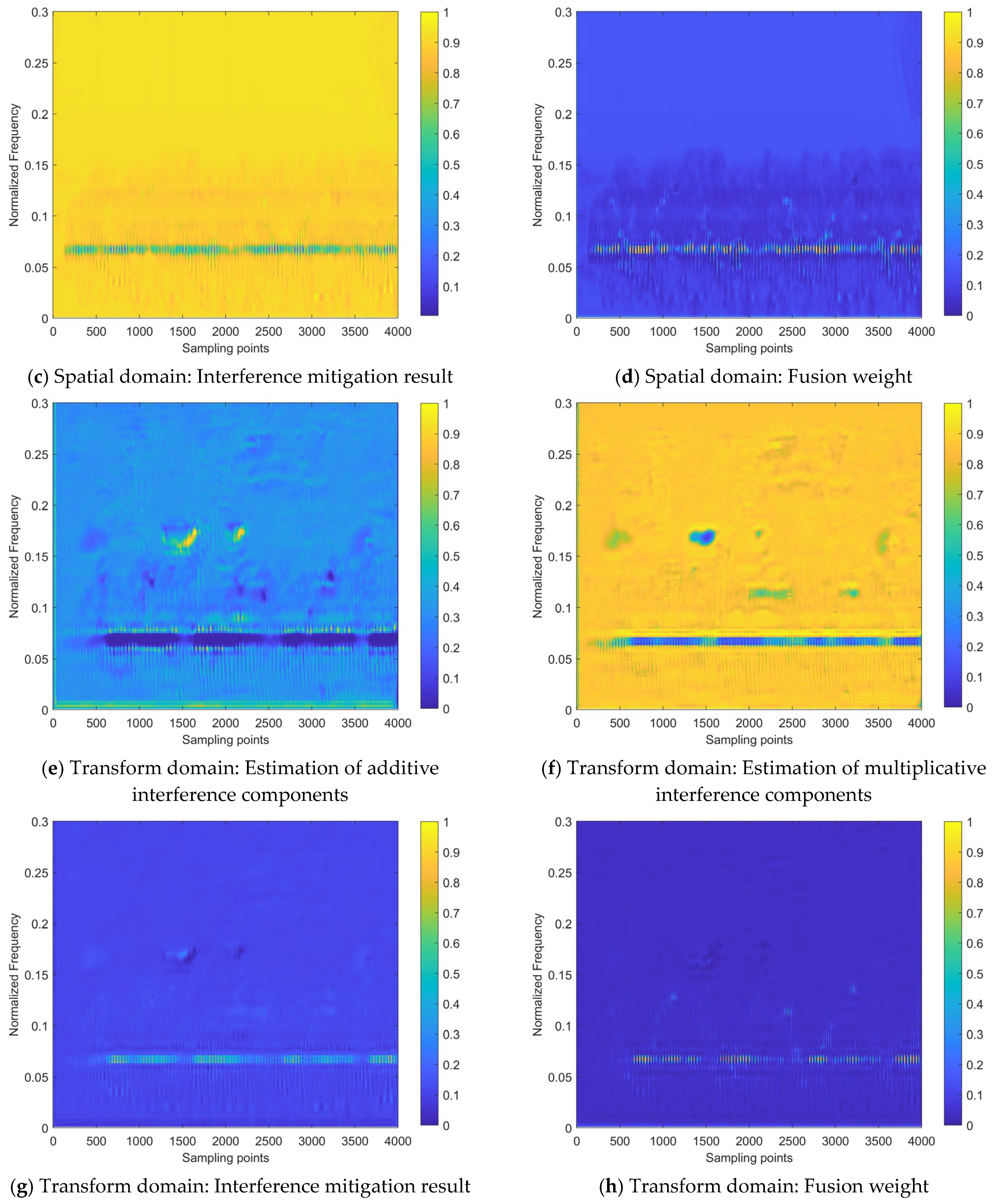
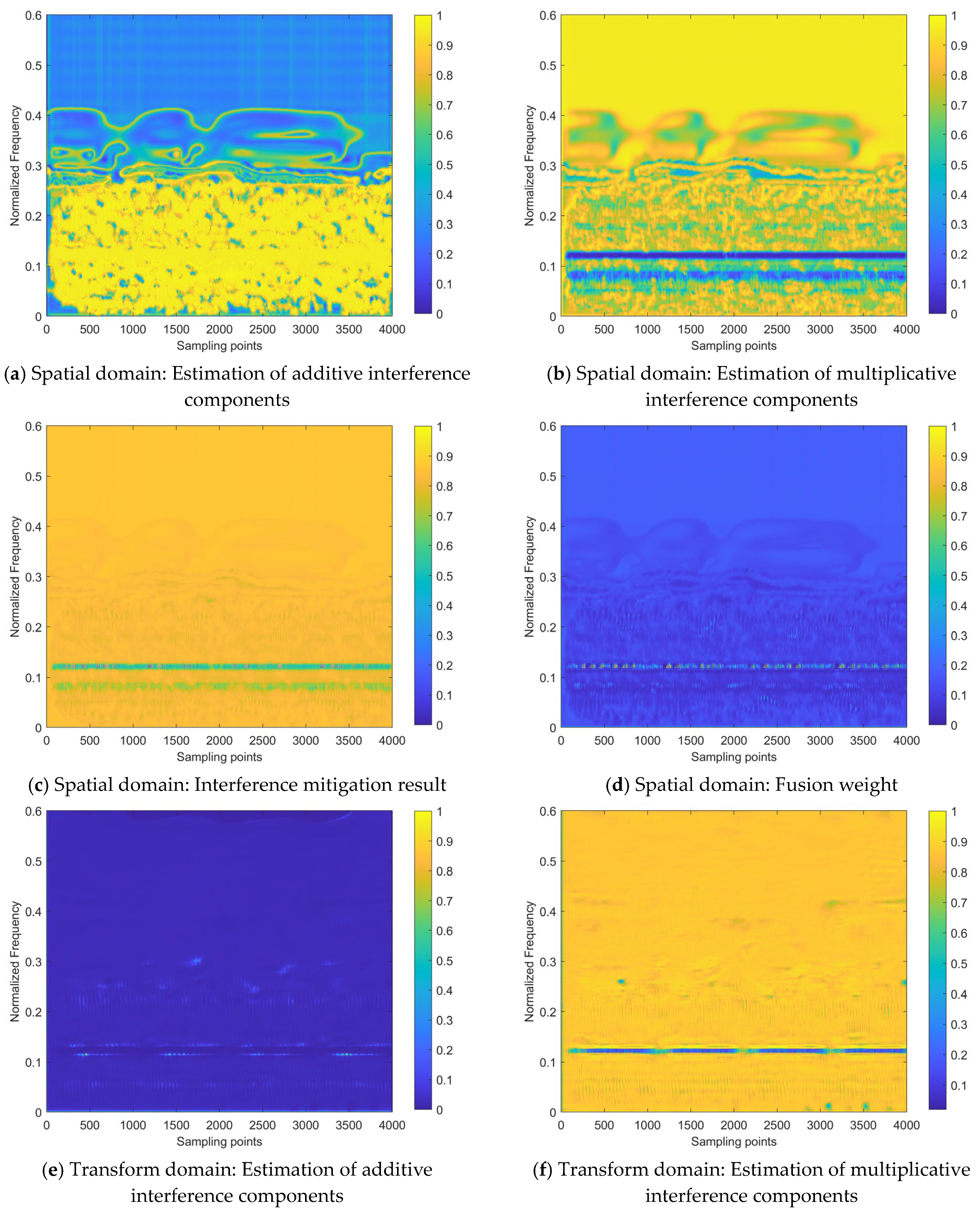
- Among the interference mitigation results of the two feature domains, the results from the transform domain are closer to the final interference mitigation results shown in Figure 12 than those from the spatial domain;
- (2)
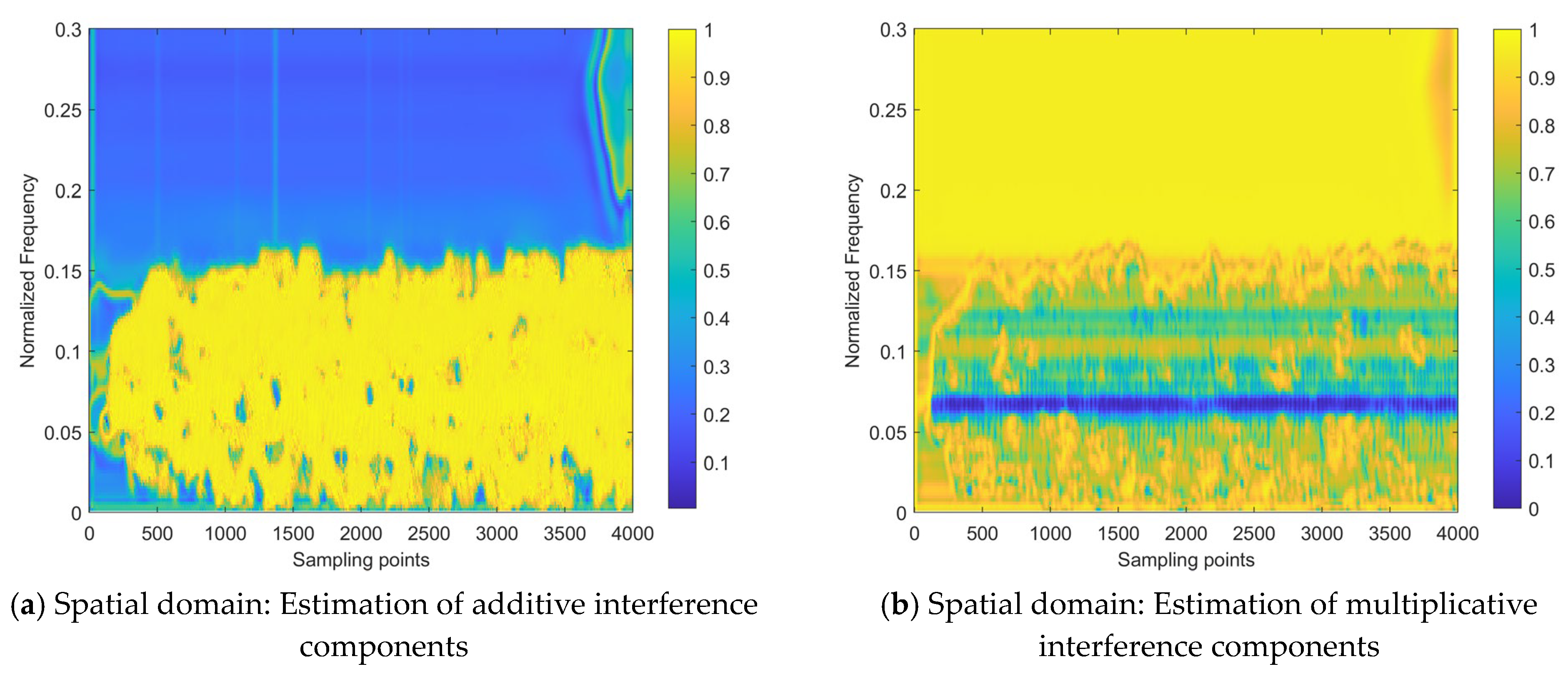
- The analysis of Figure 12 mentioned that there is an energy residual band with irregular distribution along the time axis and frequency lower than that of the target echo signal component in the final interference suppression results for Sample #2. This is due to the inaccurate estimate of the multiplicative interference components in the spatial domain, as shown in Figure 14. It can be observed that there are two prominent regions with low activation intensity in Figure 14b,c, where the region with lower position and lower continuity is the error result introduced by the spatial domain-based processing.
5.2. Comparative Experiment
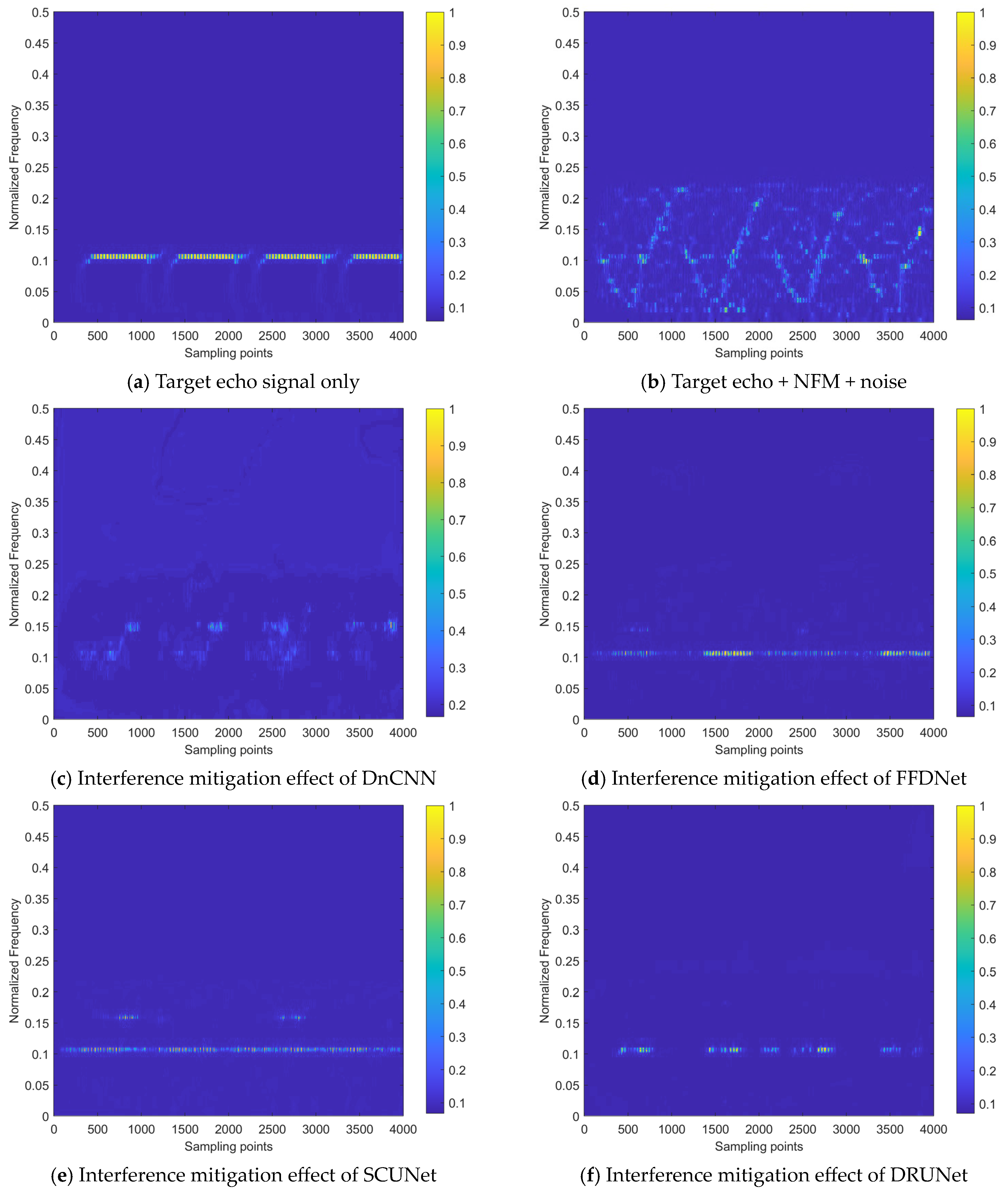
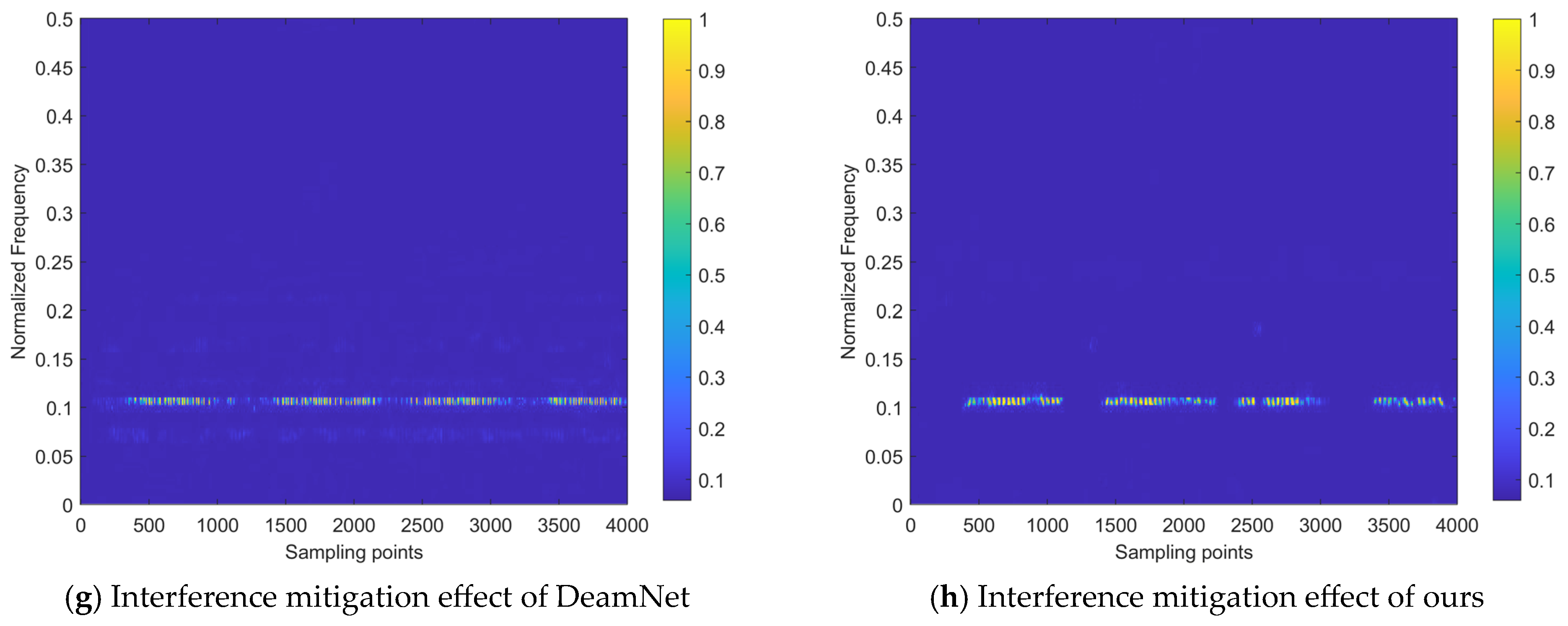
5.2.1. Comparison with Other Time–Frequency Filtering Methods
5.2.2. Mitigation Effect on Different Interference Types
6. Discussion
6.1. About the Difference between Spatial Domain and Transform Domain
6.2. About the Essence of Interference Mitigation on Time–Frequency Distribution
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sriharsha, N.T.S.; Vandana, G.S.; Bethi, P.; Pathipati, S. An Experimental Evaluation of MIMO-SAR Imaging with FMCW Radar. In Proceedings of the 2022 IEEE 2nd Mysore Sub Section International Conference (MysuruCon), Mysuru, India, 16–17 October 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Perna, S.; Natale, A.; Esposito, C.; Berardino, P.; Palmese, G.; Lanari, R. Imaging Capabilities of an Airborne X-Band SAR Based on the FMCW Technology. In Proceedings of the Multimodal Sensing: Technologies and Applications, Munich, Germany, 26–27 June 2019; Volume 11059, pp. 135–143. [Google Scholar] [CrossRef]
- Song, Z.; Peng, Z.; Lei, Z. Imaging of Missile-Borne SAR Based on FMCW. Syst. Eng. Electron. 2011, 33, 2203–2209. [Google Scholar] [CrossRef]
- Bi, H.; Zhu, D.; Bi, G.; Zhang, B.; Hong, W.; Wu, Y. FMCW SAR Sparse Imaging Based on Approximated Observation: An Overview on Current Technologies. IEEE J. Sel. Topics Appl. Earth Obs. Remote Sens. 2020, 13, 4825–4835. [Google Scholar] [CrossRef]
- El-Awamry, A.; Zheng, F.; Kaiser, T.; Khaliel, M. Harmonic FMCW Radar System: Passive Tag Detection and Precise Ranging Estimation. Sensors 2024, 24, 2541. [Google Scholar] [CrossRef] [PubMed]
- Kueppers, S.; Jaeschke, T.; Pohl, N.; Barowski, J. Versatile 126–182 GHz UWB D-Band FMCW Radar for Industrial and Scientific Applications. IEEE Sens. Lett. 2022, 6, 3500204. [Google Scholar] [CrossRef]
- Luo, Y.; Song, H.; Wang, R.; Deng, Y.; Zhao, F.; Xu, Z. Arc FMCW SAR and Applications in Ground Monitoring. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5989–5998. [Google Scholar] [CrossRef]
- Ting, J.; Oloumi, D.; Rambabu, K. FMCW SAR System for Near-Distance Imaging Applications—Practical Considerations and Calibrations. IEEE Trans. Microw. Theory Tech. 2018, 66, 450–461. [Google Scholar] [CrossRef]
- Yan, J.; Hu, J.; Zhang, G.; Chen, H.; Hu, H.; Hong, H.; Gu, C.; Zhu, X.; Li, C. The Development of Vital-SAR-Imaging with an FMCW Radar System. In Proceedings of the 2019 IEEE MTT-S International Microwave Biomedical Conference (IMBioC), Nanjing, China, 6–8 May 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Aydogdu, C.; Garcia, N.; Hammarstrand, L.; Wymeersch, H. Radar Communications for Combating Mutual Interference of FMCW Radars. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Park, J.K.; Choi, I.; Kim, K.T. Length Prediction of Moving Vehicles Using a Commercial FMCW Radar. IEEE Trans. Intell. Transp. Syst. 2022, 23, 14833–14845. [Google Scholar] [CrossRef]
- Li, Y.J.; Hunt, S.; Park, J.; O’Toole, M.; Kitani, K. Azimuth Super-Resolution for FMCW Radar in Autonomous Driving. In Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Vancouver, BC, Canada, 17–24 June 2023; pp. 17504–17513. [Google Scholar] [CrossRef]
- Lee, S.; Lee, B.; Lee, J.-E.; Kim, S.-C. Statistical Characteristic-Based Road Structure Recognition in Automotive FMCW Radar Systems. IEEE Trans. Intell. Transp. Syst. 2019, 20, 2418–2429. [Google Scholar] [CrossRef]
- Toth, M.; Meissner, P.; Melzer, A.; Witrisal, K. Analytical Investigation of Non-Coherent Mutual FMCW Radar Interference. In Proceedings of the 2018 15th European Radar Conference (EuRAD), Madrid, Spain, 26–28 September 2018; pp. 71–74. [Google Scholar] [CrossRef]
- Li, Z.; Huang, X.; Zhang, G.; Zeng, R.; Lv, L. Analysis of Phase Noise and Transmit/Receive Isolation Influence on FMCW-Radar Performance. In Proceedings of the 2018 International Conference on Microwave and Millimeter Wave Technology (ICMMT), Chengdu, China, 7–11 May 2018; pp. 1–3. [Google Scholar] [CrossRef]
- Rao, S.; Mani, A. Interference Characterization in FMCW Radars. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Makino, Y.; Nozawa, T.; Umehira, M.; Wang, X.; Takeda, S.; Kuroda, H. Inter-Radar Interference Analysis of FMCW Radars with Different Chirp Rates. J. Eng. 2019, 19, 5634–5638. [Google Scholar] [CrossRef]
- Doerry, A.W. Comments on Radar Interference Sources and Mitigation Techniques. In Proceedings of the Radar Sensor Technology XIX, and Active and Passive Signatures VI, Baltimore, MD, USA, 20–23 April 2015; Volume 9461, pp. 609–616. [Google Scholar] [CrossRef]
- Stove, A.; Baker, C. Radio-Frequency Interference to Automotive Radar Sensors. IET Radar Sonar Navig. 2018, 12, 1154–1164. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Q.; Li, K. A Smart Noise Jamming Suppression Method Based on Atomic Dictionary Parameter Optimization Decomposition. Remote Sens. 2022, 14, 1921. [Google Scholar] [CrossRef]
- Luo, B.S.; Liu, L.M.; Liu, J.Q.; Dong, J. Research on Noise Modulated Active Jamming Signal Recognition Technology. Radar Sci. Technol. 2019, 17, 597–602. [Google Scholar] [CrossRef]
- Samy, T.M.; Abdel-Latif, M.S.; Elgamel, S.A.; Ahmed, F.M. FPGA Implementation of Pulsed Noise Interference against LFM Radar. In Proceedings of the 2017 12th International Conference on Computer Engineering and Systems (ICCES), Cairo, Egypt, 19–20 December 2017; pp. 695–700. [Google Scholar] [CrossRef]
- Li, Y.; Wang, C.Y.; Chen, Q.; Li, F.; Hu, C. Mutual Interference Suppression Method for FMCW Automotive Radar. J. Signal Process. 2021, 37, 258–267. [Google Scholar] [CrossRef]
- Wang, Z.; Yu, W.; Li, J.; Yu, Z.; Zhao, Y.; Luo, Y. Radio Frequency Interference Mitigation in Synthetic Aperture Radar Data Based on Instantaneous Spectrum Forward Consecutive Mean Excision. Remote Sens. 2024, 16, 150. [Google Scholar] [CrossRef]
- Wang, J.; Ding, M.; Yarovoy, A. Matrix-pencil Approach-Based Interference Mitigation for FMCW Radar Systems. IEEE Trans. Microw. Theory Tech. 2021, 69, 5099–5115. [Google Scholar] [CrossRef]
- Wang, J. CFAR-Based Interference Mitigation for FMCW Automotive Radar Systems. IEEE Trans. Intell. Transp. Syst. 2021, 23, 12229–12238. [Google Scholar] [CrossRef]
- Neemat, S.; Krasnov, O.; Yarovoy, A. An Interference Mitigation Technique for FMCW Radar Using Beat-Frequencies Interpolation in the STFT Domain. IEEE Trans. Microw. Theory Tech. 2018, 67, 1207–1220. [Google Scholar] [CrossRef]
- Rameez, M.; Pettersson, M.I.; Dahl, M. Interference Compression and Mitigation for Automotive FMCW Radar Systems. IEEE Sens. J. 2022, 22, 19739–19749. [Google Scholar] [CrossRef]
- Li, Y.; Feng, B.; Zhang, W. Mutual Interference Mitigation of Millimeter-Wave Radar Based on Variational Mode Decomposition and Signal Reconstruction. Remote Sens. 2023, 15, 557. [Google Scholar] [CrossRef]
- Fu, Z.; Zhang, H.; Zhao, J.; Li, N.; Zheng, F. A Modified 2-D Notch Filter Based on Image Segmentation for RFI Mitigation in Synthetic Aperture Radar. Remote Sens. 2023, 15, 846. [Google Scholar] [CrossRef]
- Yin, M.; Feng, B.; Li, Y. Mitigation of Millimeter-Wave Radar Mutual Interference Using Spectrum Sub-Band Analysis and Synthesis. Remote Sens. 2023, 15, 3210. [Google Scholar] [CrossRef]
- Xu, Z.; Wei, S. FMCW Radar System Interference Mitigation Based on Time-Domain Signal Reconstruction. Sensors 2023, 23, 7113. [Google Scholar] [CrossRef] [PubMed]
- Singhal, M.; Khanna, S. Proximal Subgradient Descent Method for Cancelling Cross-Interference in FMCW Radars. In Proceedings of the 2023 IEEE Statistical Signal Processing Workshop (SSP), Hanoi, Vietnam, 2–5 July 2023; pp. 225–229. [Google Scholar] [CrossRef]
- Xu, Z.; Xue, S.; Wang, Y. Incoherent Interference Detection and Mitigation for Millimeter-Wave FMCW Radars. Remote Sens. 2022, 14, 4817. [Google Scholar] [CrossRef]
- Zhang, R.; Cheng, L.; Wang, S.; Lou, Y.; Gao, Y.; Wu, W.; Ng, D.W.K. Integrated Sensing and Communication with Massive MIMO: A Unified Tensor Approach for Channel and Target Parameter Estimation. IEEE Trans. Wirel. Commun, 2024; early access. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Ding, Z. Multi-Target Position and Velocity Estimation Using OFDM Communication Signals. IEEE Trans. Commun. 2020, 68, 1160–1174. [Google Scholar] [CrossRef]
- Correas-Serrano, A.; Gonzalez-Huici, M.A. Sparse Reconstruction of Chirplets for Automotive FMCW Radar Interference Mitigation. In Proceedings of the 2019 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Detroit, MI, USA, 15–16 April 2019; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, Y.; Huang, Y.; Wen, C.; Zhou, X.; Liu, J.; Hong, W. Mutual Interference Mitigation for Automotive FMCW Radar With Time and Frequency Domain Decomposition. IEEE Trans. Microw. Theory Tech. 2023, 71, 5028–5044. [Google Scholar] [CrossRef]
- Wang, J.; Li, R.; Zhang, X.; He, Y. Interference Mitigation for Automotive FMCW Radar Based on Contrastive Learning With Dilated Convolution. IEEE Trans. Intell. Transp. Syst. 2024, 25, 545–558. [Google Scholar] [CrossRef]
- Wang, J.; Li, R.; He, Y.; Yang, Y. Prior-Guided Deep Interference Mitigation for FMCW Radars. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–16. [Google Scholar] [CrossRef]
- Mun, J.; Ha, S.; Lee, J. Automotive Radar Signal Interference Mitigation Using RNN with Self-Attention. In Proceedings of the ICASSP 2020—2020 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Barcelona, Spain, 4–8 May 2020; pp. 3802–3806. [Google Scholar] [CrossRef]
- Zhang, H.; Wei, S.; Wang, M.; Hu, Y.; Shi, J.; Cui, G. FUAS-Net: Feature-Oriented Unsupervised Network for FMCW Radar Interference Suppression. IEEE Trans. Microw. Theory Tech. 2024, 72, 2602–2619. [Google Scholar] [CrossRef]
- Xu, X.; Fan, W.; Wang, S.; Zhou, F. WBIM-GAN: A Generative Adversarial Network Based Wideband Interference Mitigation Model for Synthetic Aperture Radar. Remote Sens. 2024, 16, 910. [Google Scholar] [CrossRef]
- Daubechies, I.; Lu, J.; Wu, H.-T. Synchrosqueezed Wavelet Transforms: An Empirical Mode Decomposition-like Tool. Appl. Comput. Harmon. Anal. 2011, 30, 243–261. [Google Scholar] [CrossRef]
- Zhou, Z.; Siddiquee, M.M.R.; Tajbakhsh, N.; Liang, J. UNet++: Redesigning Skip Connections to Exploit Multiscale Features in Image Segmentation. IEEE Trans. Med. Imaging 2020, 39, 1856–1867. [Google Scholar] [CrossRef] [PubMed]
- Liu, P.; Zhang, H.; Lian, W.; Zuo, W. Multi-Level Wavelet Convolutional Neural Networks. IEEE Access 2019, 7, 74973–74985. [Google Scholar] [CrossRef]
- Baraniuk, R.G.; Flandrin, P.; Janssen, A.J.E.M.; Michel, O.J.J. Measuring Time–frequency Information Content Using the Renyi Entropies. IEEE Trans. Inform. Theory 2001, 47, 1391–1409. [Google Scholar] [CrossRef]
- Zhang, K.; Zuo, W.; Chen, Y.; Meng, D.; Zhang, L. Beyond a Gaussian Denoiser: Residual Learning of Deep CNN for Image Denoising. IEEE Trans. Image Process. 2017, 26, 3142–3155. [Google Scholar] [CrossRef] [PubMed]
- Zhang, K.; Zuo, W.; Zhang, L. FFDNet: Toward a Fast and Flexible Solution for CNN-Based Image Denoising. IEEE Trans. Image Process. 2018, 27, 4608–4622. [Google Scholar] [CrossRef]
- Zhang, K.; Li, Y.; Liang, J.; Cao, J.; Zhang, Y.; Tang, H.; Fan, D.-P.; Timofte, R.; Gool, L.V. Practical Blind Image Denoising via Swin-Conv-UNet and Data Synthesis. Mach. Intell. Res. 2023, 20, 822–836. [Google Scholar] [CrossRef]
- Ren, C.; He, X.; Wang, C.; Zhao, Z. Adaptive Consistency Prior Based Deep Network for Image Denoising. In Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, TN, USA, 20–25 June 2021; pp. 8592–8602. [Google Scholar] [CrossRef]
- Zhang, K.; Li, Y.; Zuo, W.; Zhang, L.; Van Gool, L.; Timofte, R. Plug-and-Play Image Restoration with Deep Denoiser Prior. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 6360–6376. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Object | Parameter | Value |
|---|---|---|
| Radar signal | Center frequency | 4 GHz |
| Bandwidth | 50 MHz | |
| Pulse width | 10 | |
| Chirp rate | 5 MHz/ | |
| Sampling frequency | 100 MHz | |
| Target echo | Range * | 50~1000 m |
| Background | Signal-to-noise ratio (SNR) | 0 dB |
| Interference signal | Interference-to-signal ratio (ISR) * | 0~10 dB |
| Phase * | 0~2π | |
| Interference and jamming signal type | NFM, SFM, swept-frequency | |
| Delay time * | −5~5 | |
| Bandwidth * | 50~80 MHz | |
| Period of swept-frequency * | 5~50 | |
| Pulse width of SFM * | 5~50 | |
| Time–frequency analysis | Implementation method | Fourier synchrosqueezed transform (FSST) |
| Window type | Kaiser window | |
| Window length | 256 | |
| Window shape factor | 10 | |
| Overlap length | 255 | |
| FFT points | 256 |
| Task Type | Evaluation Metric | Spatial Domain Model | Transform Domain Model | Dual-Domain Fusion Model |
|---|---|---|---|---|
| Image restoration | PSNR (dB) | 30.385 | 31.452 | 32.652 |
| SSIM | 0.964 | 0.971 | 0.976 | |
| Time–frequency energy aggregation degree | RE | 15.9959 | 15.9895 | 15.9879 |
| Signal quality | ∆SINR (dB) | 14.4838 | 16.3621 | 18.8837 |
| Task Type | Evaluation Metrics | DnCNN | FFDNet | SCUNet | DRUNet | DeamNet | Our Model |
|---|---|---|---|---|---|---|---|
| Image restoration | PSNR | 29.162 | 31.783 | 31.721 | 32.149 | 32.543 | 32.652 |
| SSIM | 0.859 | 0.943 | 0.959 | 0.961 | 0.972 | 0.976 | |
| Time–frequency energy aggregation degree | RE | 16.3693 | 16.1164 | 16.0467 | 15.9982 | 15.9793 | 15.9879 |
| Signal quality | ∆SINR (dB) | 10.5142 | 14.9836 | 16.5562 | 17.7846 | 18.2215 | 18.8837 |
| Metrics | DnCNN | FFDNet | SCUNet | DRUNet | DeamNet | Our model |
|---|---|---|---|---|---|---|
| Params | 1.2 × 106 | 1.1 × 106 | 32.6 × 106 | 17.9 × 106 | 1.8 × 106 | 0.8 × 106 |
| FLOPs | 309.8 × 109 | 68.5 × 109 | 554.5 × 109 | 319.1 × 109 | 582.8 × 109 | 11.2 × 109 |
| Task Type | Evaluation Metrics | SFM | Swept-Frequency |
|---|---|---|---|
| Image restoration | PSNR | 31.673 | 32.421 |
| SSIM | 0.977 | 0.984 | |
| Time–frequency energy aggregation degree | RE | 15.9473 | 15.8966 |
| Signal quality | ∆SINR (dB) | 16.3425 | 18.0752 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Cao, R.; Zhang, A.; Li, P. An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering. Sensors 2024, 24, 3288. https://doi.org/10.3390/s24113288
Zhou Y, Cao R, Zhang A, Li P. An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering. Sensors. 2024; 24(11):3288. https://doi.org/10.3390/s24113288
Chicago/Turabian StyleZhou, Yu, Ronggang Cao, Anqi Zhang, and Ping Li. 2024. "An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering" Sensors 24, no. 11: 3288. https://doi.org/10.3390/s24113288
APA StyleZhou, Y., Cao, R., Zhang, A., & Li, P. (2024). An Interference Mitigation Method for FMCW Radar Based on Time–Frequency Distribution and Dual-Domain Fusion Filtering. Sensors, 24(11), 3288. https://doi.org/10.3390/s24113288