
Research on Assimilation of Unmanned Aerial Vehicle Remote Sensing Data and AquaCrop Model

 ,
,  ,
, 
 and
and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Field Experiment Data
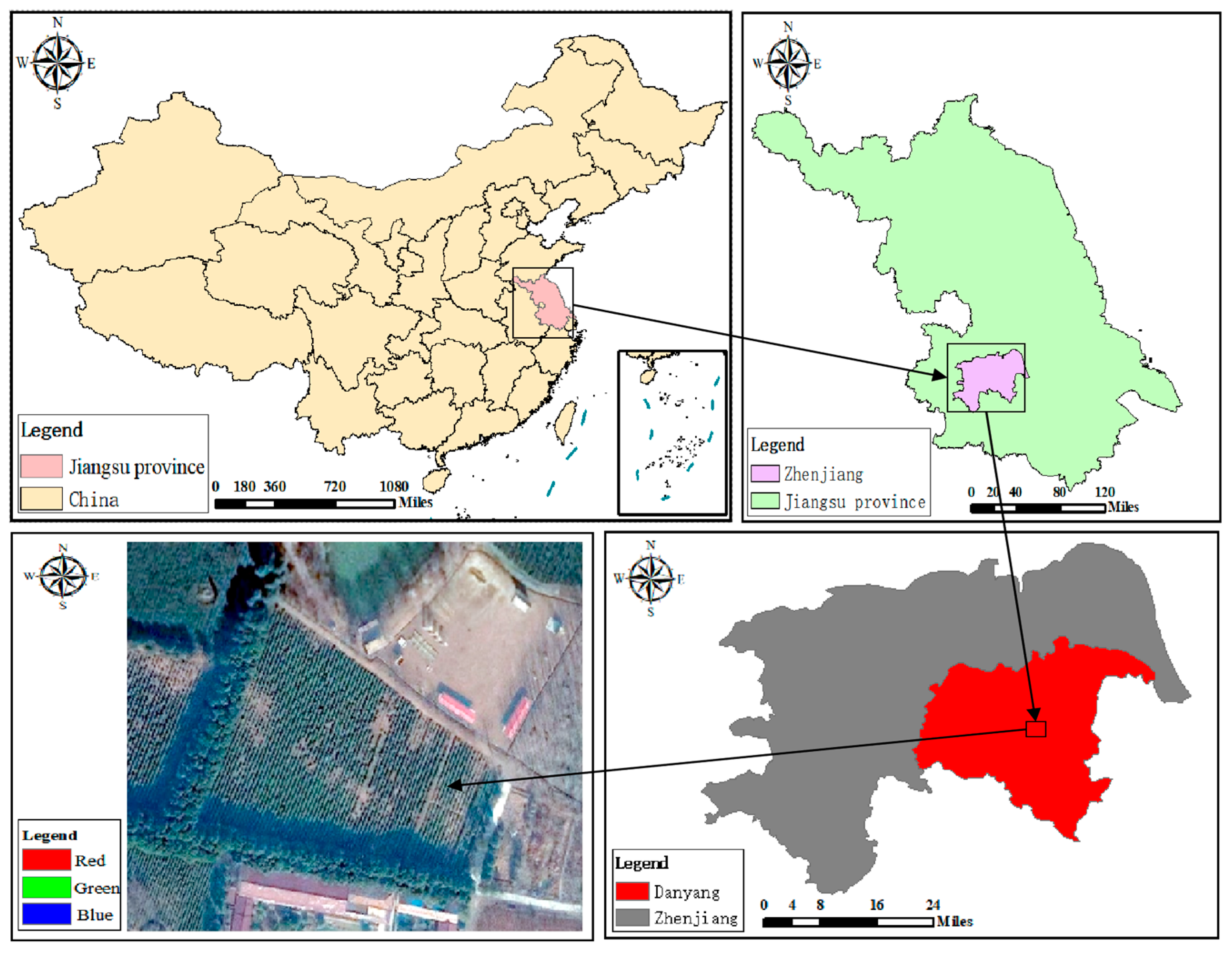
2.1.1. Overview of the Test Area
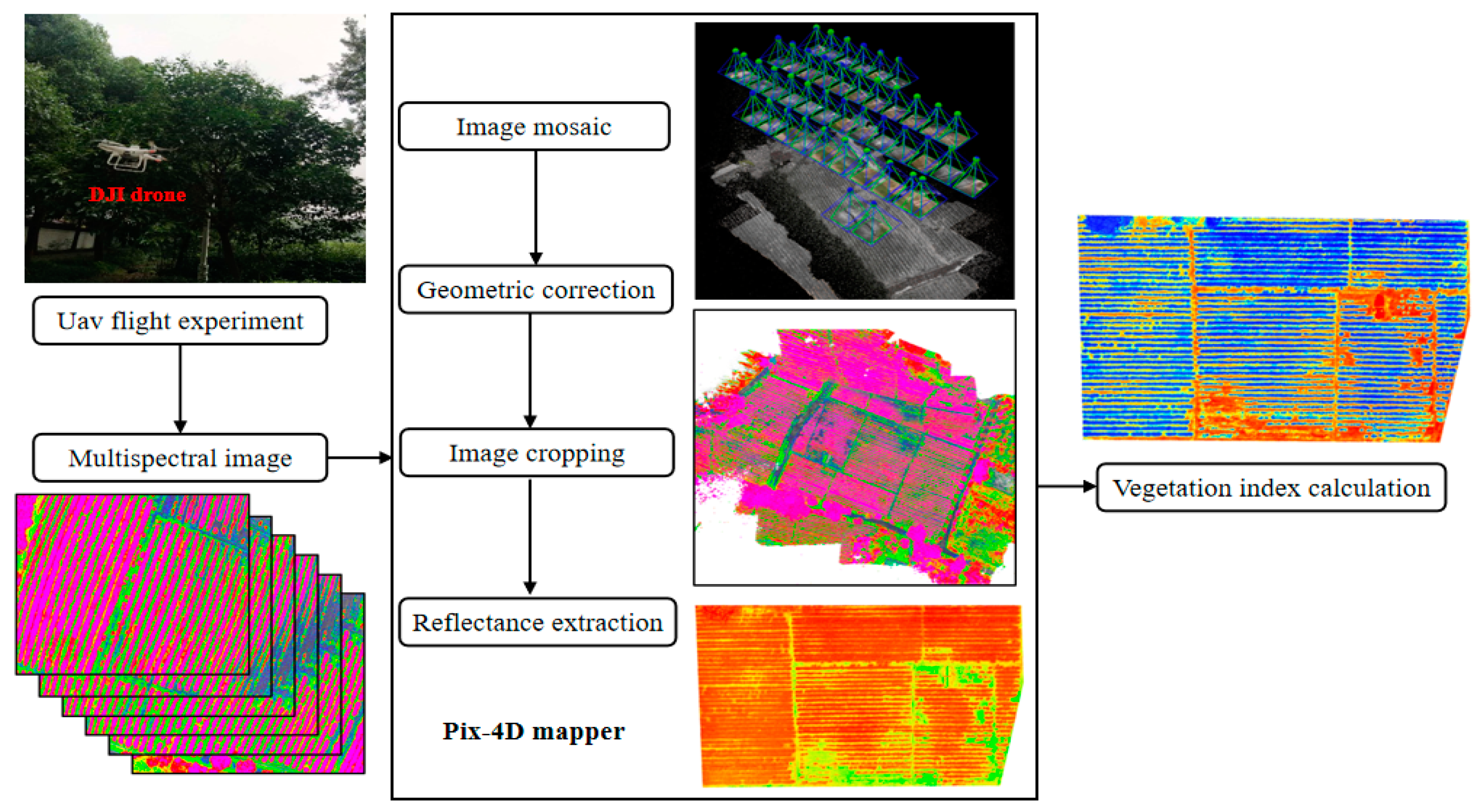
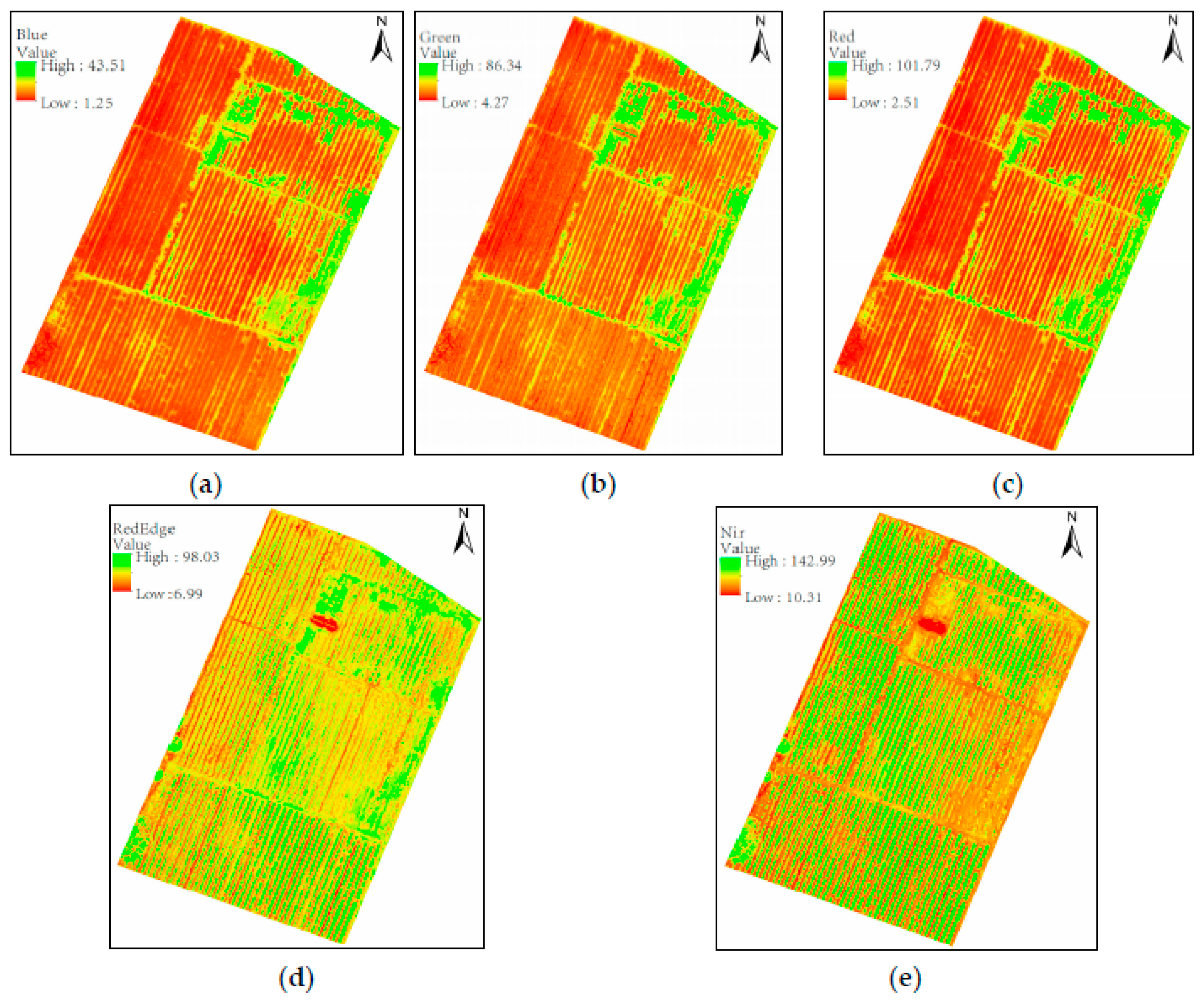
2.1.2. Field UAV Remote Sensing Data Acquisition
2.2. Remote Sensing Image Processing
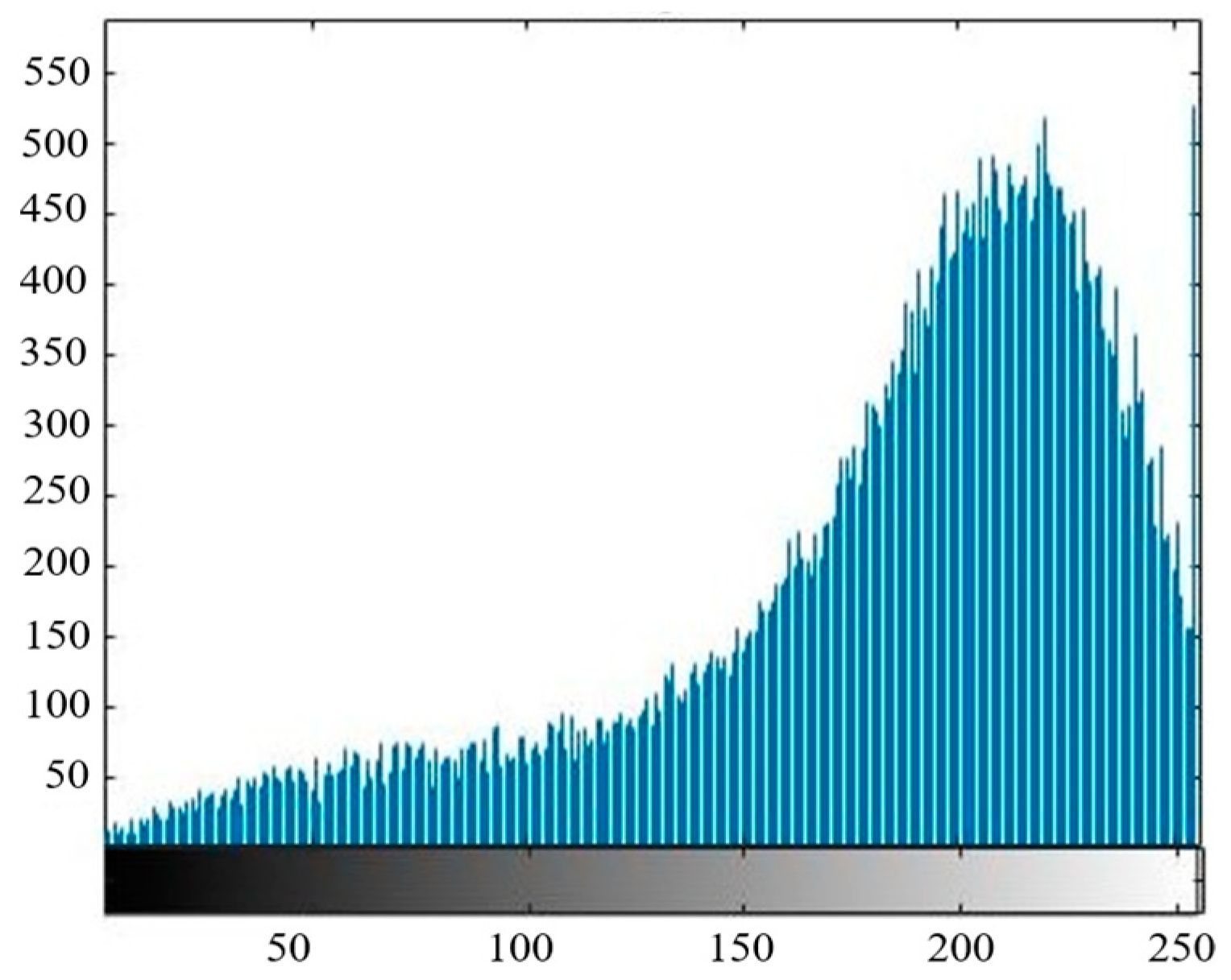
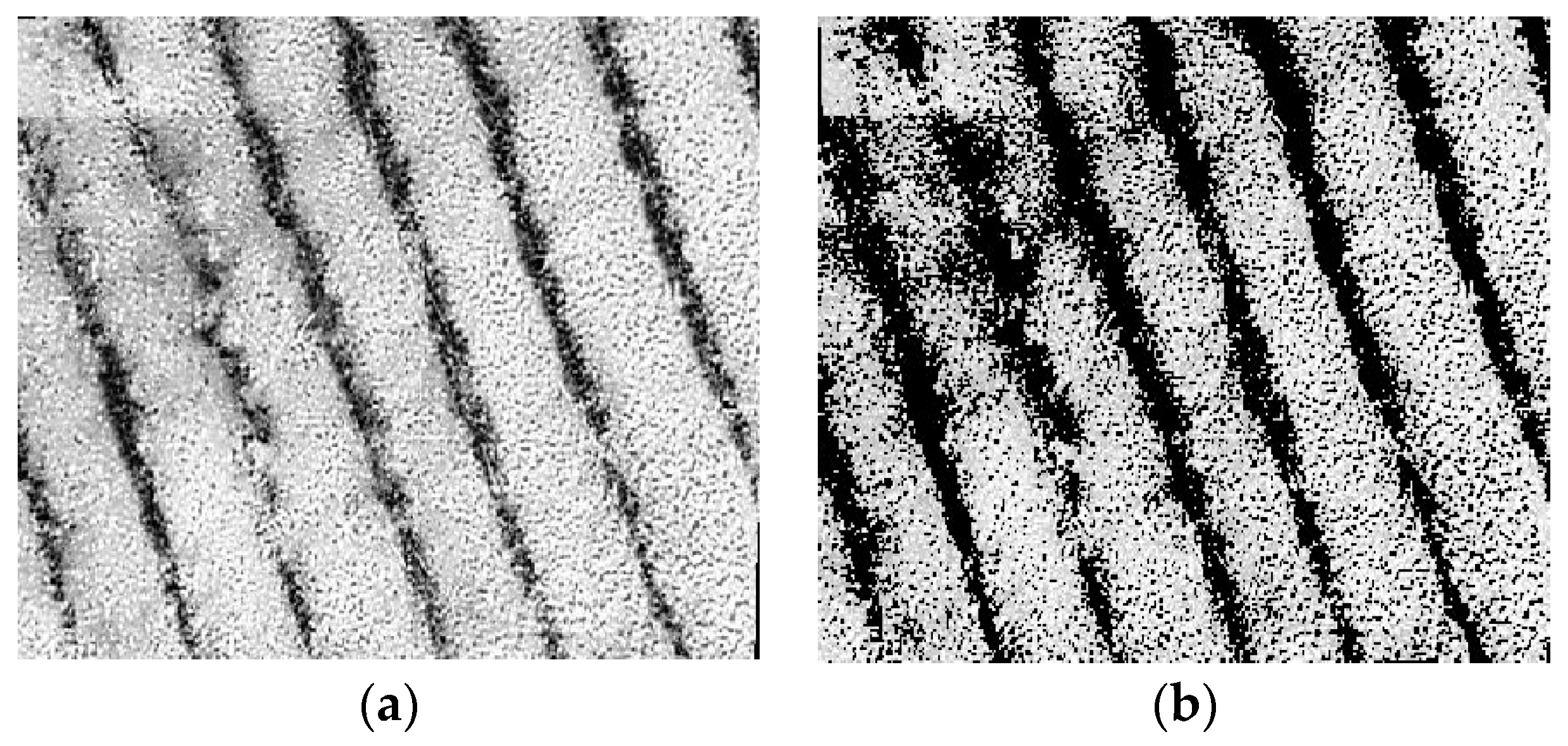
2.3. Canopy Coverage Extraction
2.4. Calculation of Vegetation Index
2.5. Basic Principles of AquaCrop Model
2.6. Particle Swarm Optimization Assimilation Principle
- (1)
- Firstly, the position and velocity of each particle are determined by random distribution, and then the relevant information (such as velocity and position) is taken as a special weight in the current solution space at each random position;
- (2)
- A better (or worse) solution in the space of a set of possible solutions found is selected, which is the location of the optimal value of the current state (objective function);
- (3)
- Finally, the particle swarm is moved to a new position according to certain rules;
- (4)
- After the new position is generated, the influence of each particle on the position of the minimum value of the objective function in the current state (that is, the weight) is calculated, so as to achieve the purpose of optimizing the objective function.
2.7. Model Evaluation Index
3. Results and Analysis
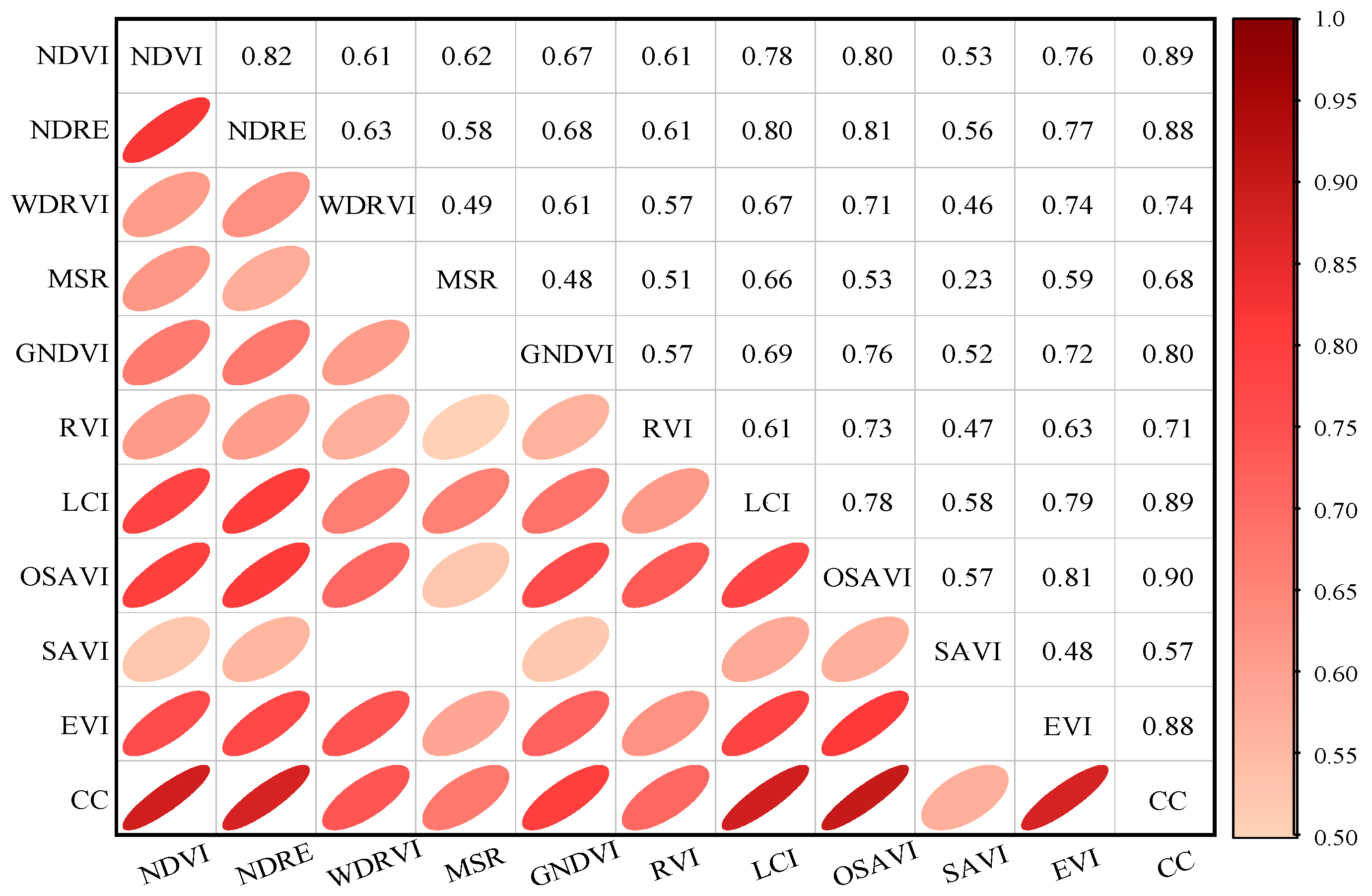
3.1. Correlation Analysis of Canopy Coverage
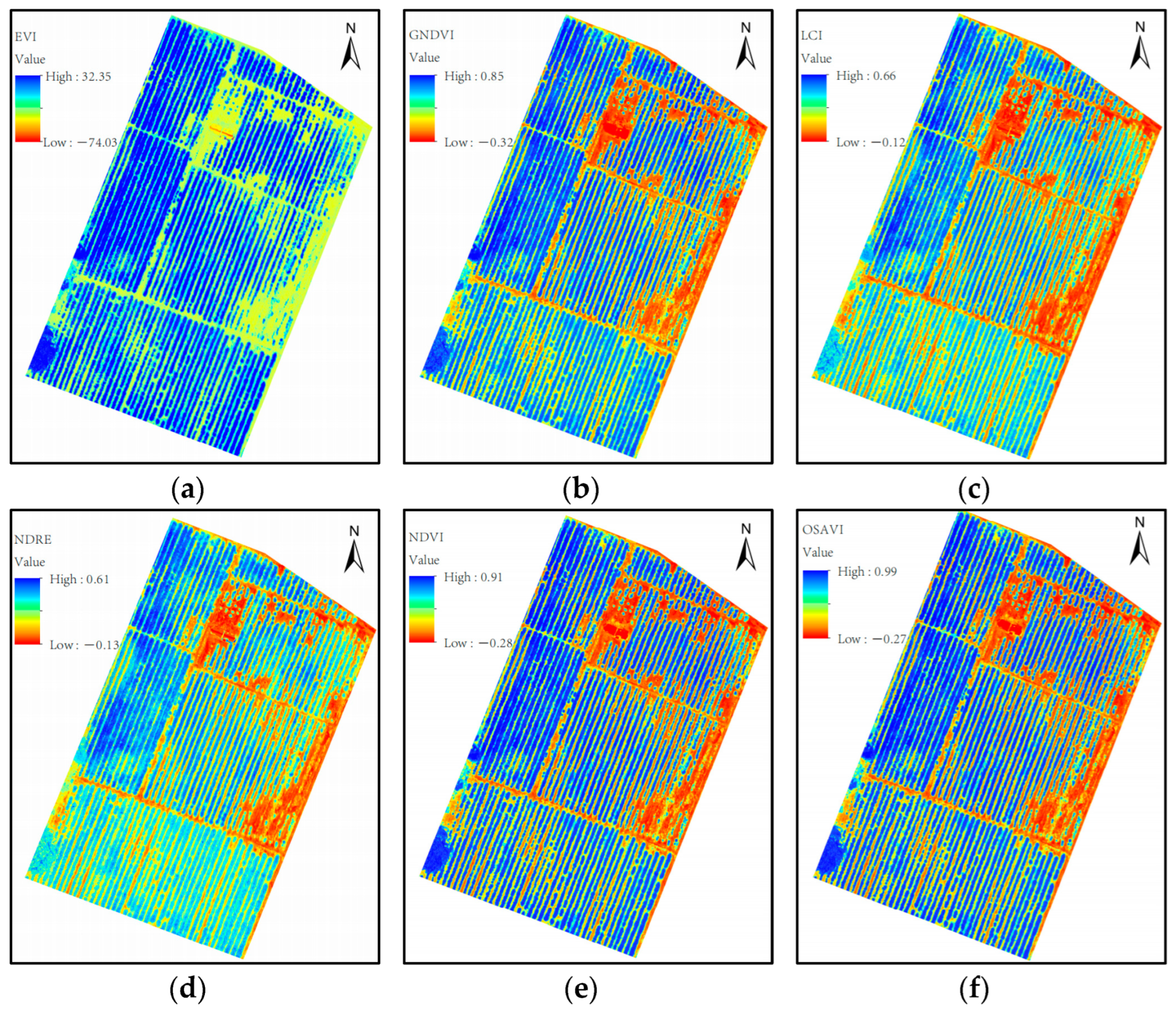
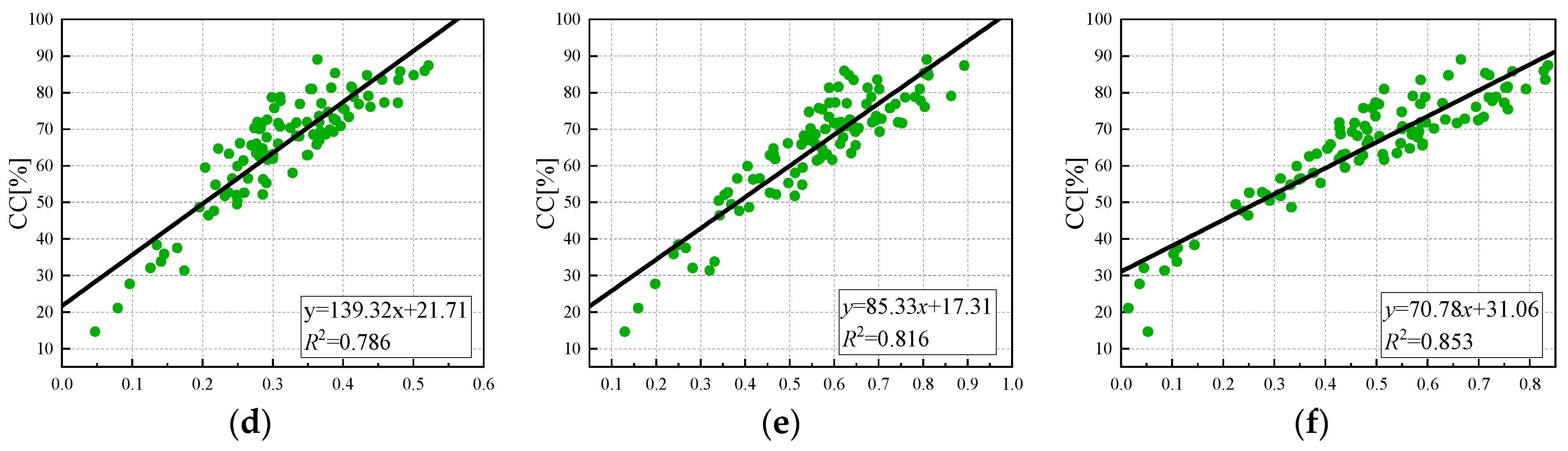
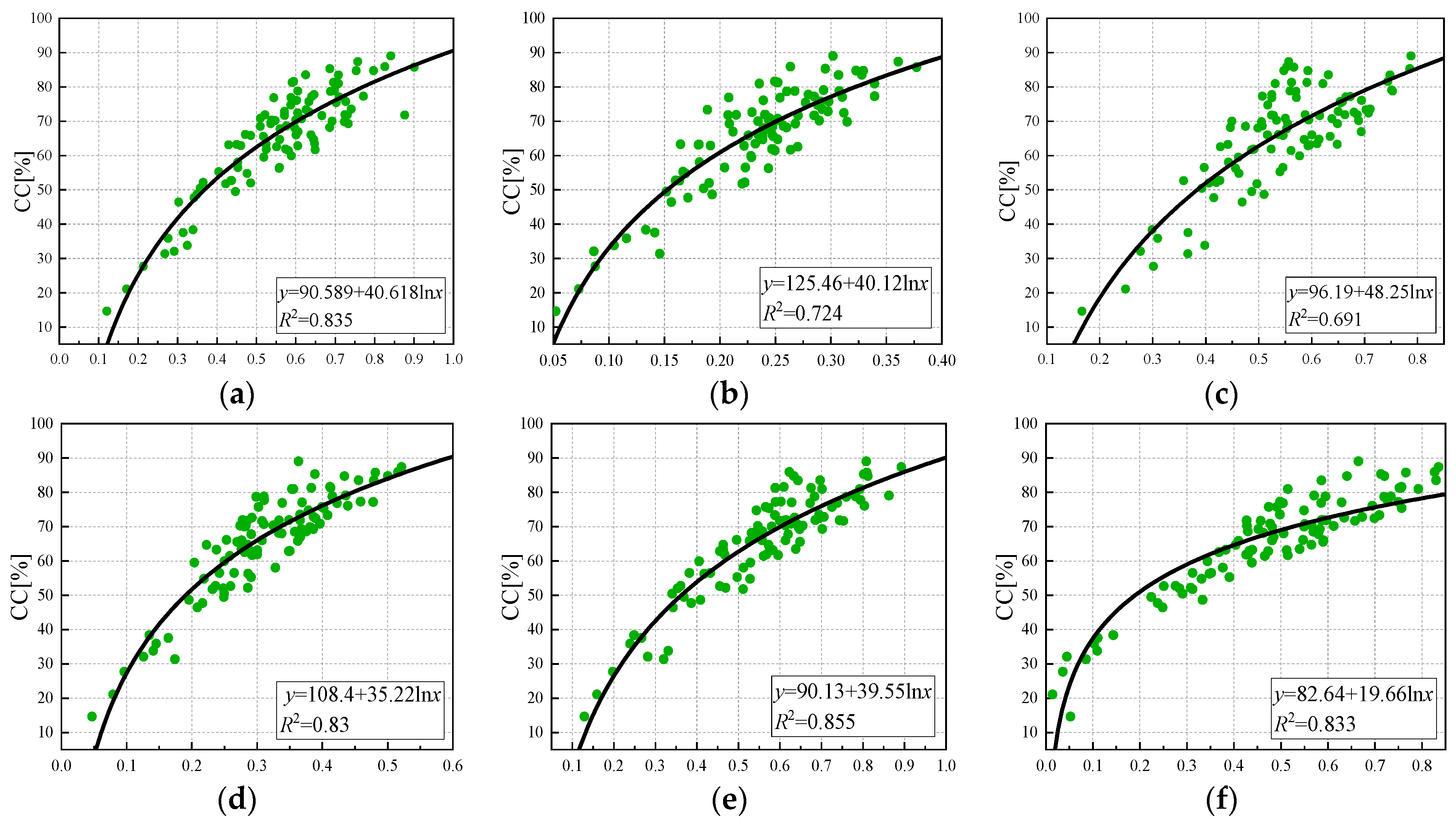
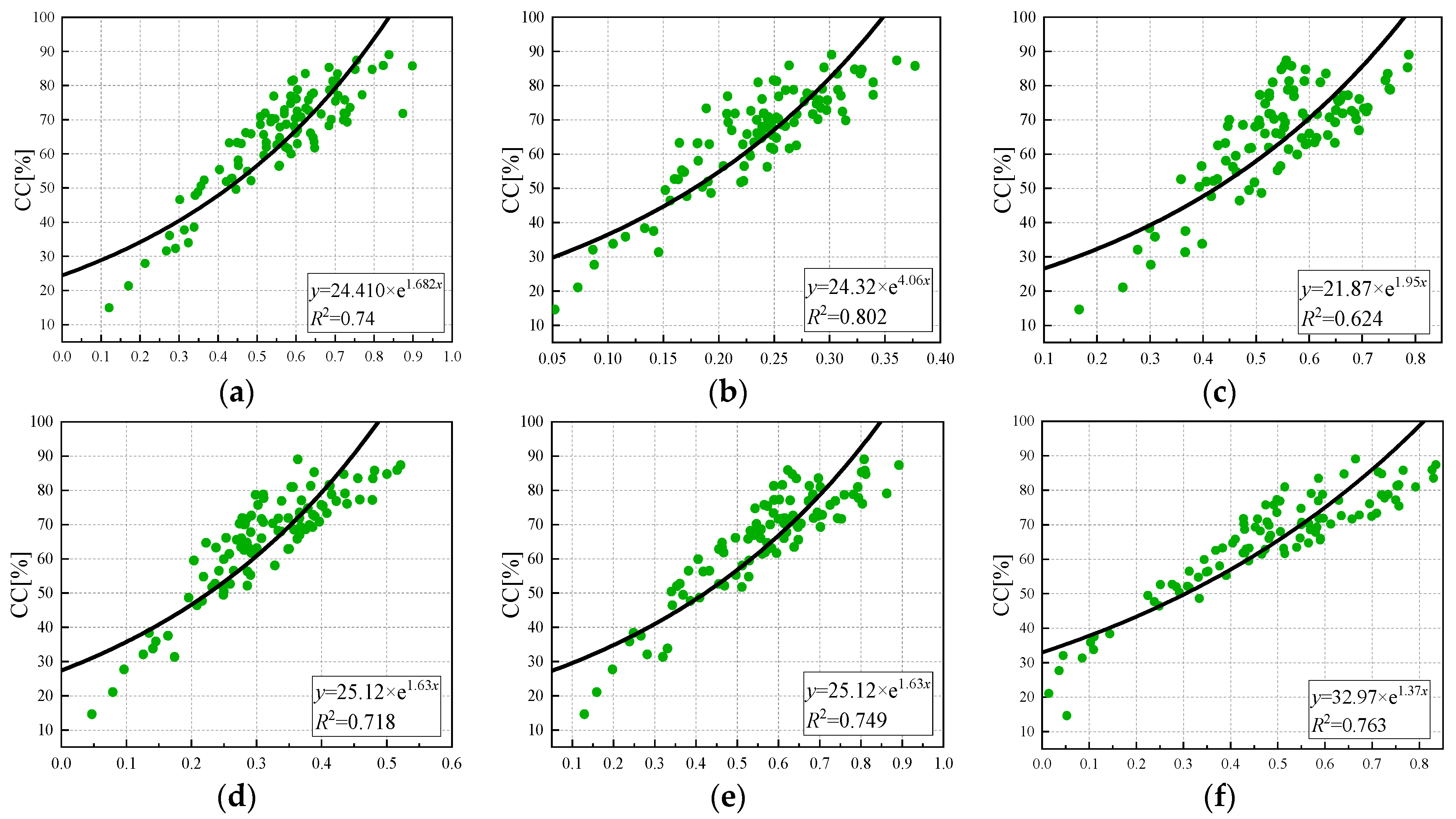
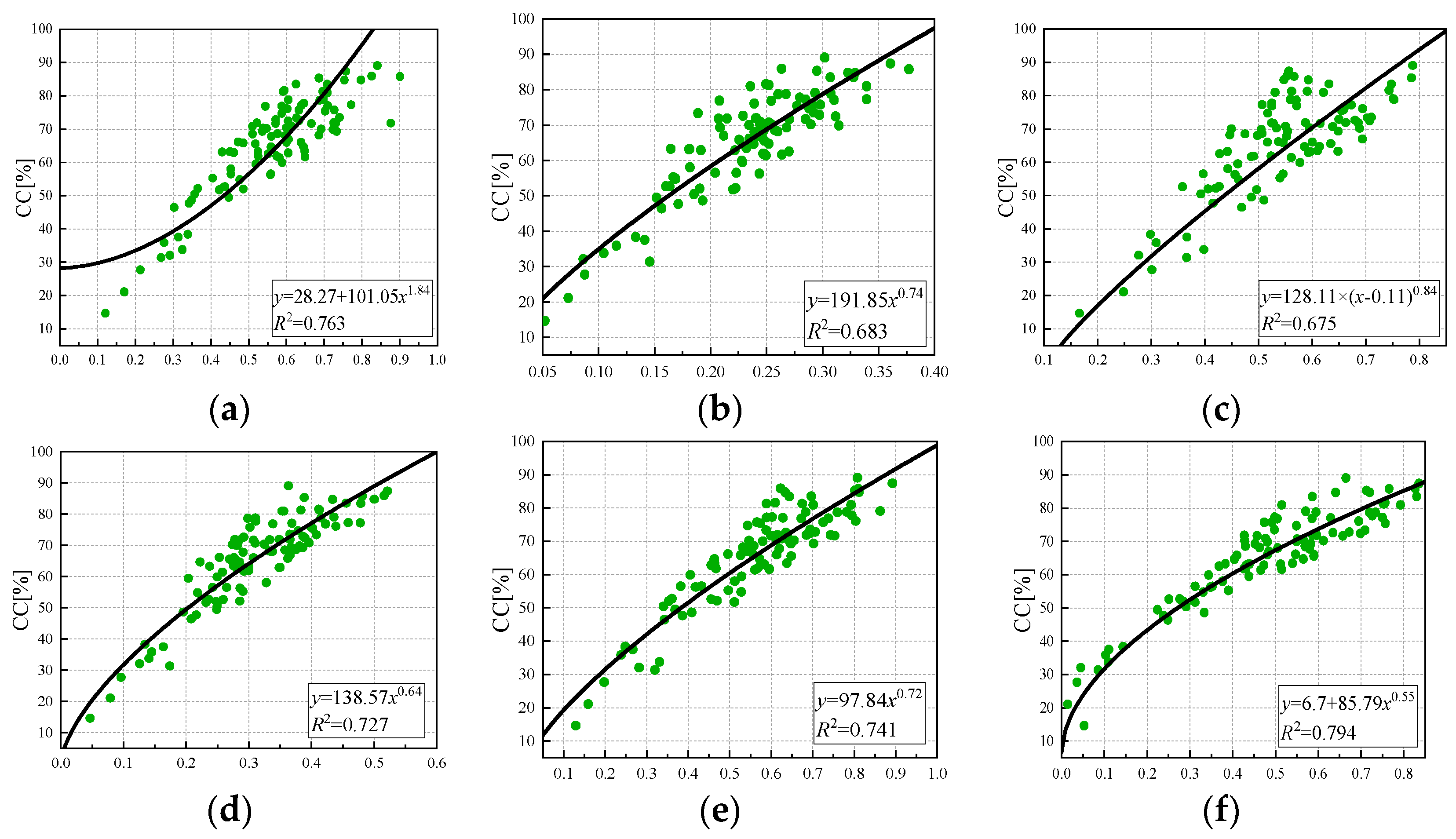
3.2. Canopy Coverage Inversion Based on Vegetation Index
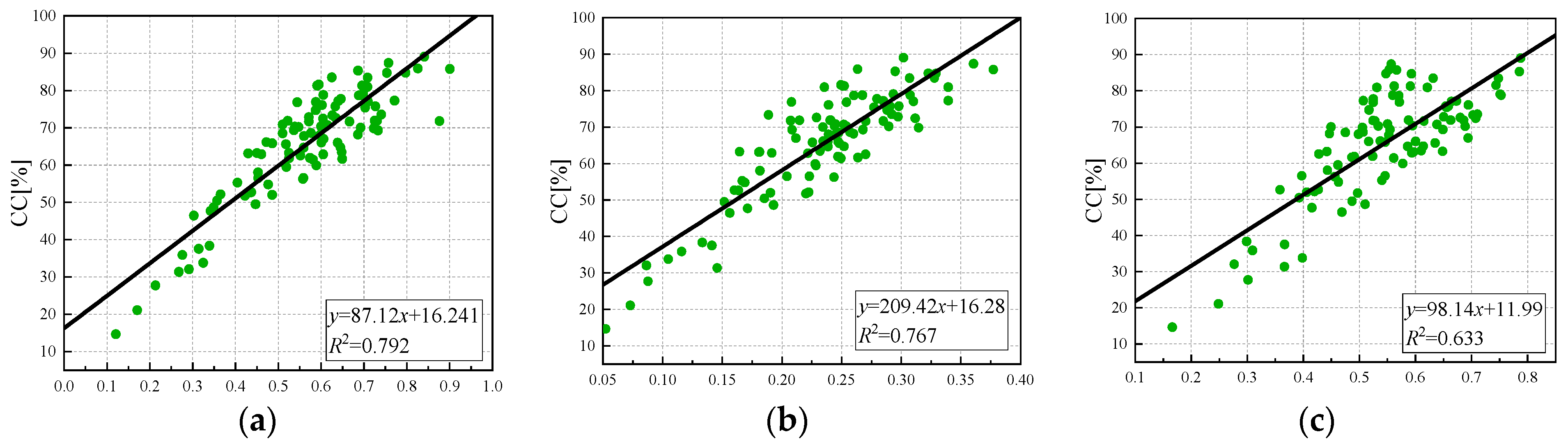
3.2.1. Modeling Results of Canopy Coverage Inversion Model
3.2.2. Canopy Coverage Inversion Model Test
3.3. Research on Aquacrop Model Assimilation Based on PSO
3.3.1. PSO Assimilation Process
- (1)
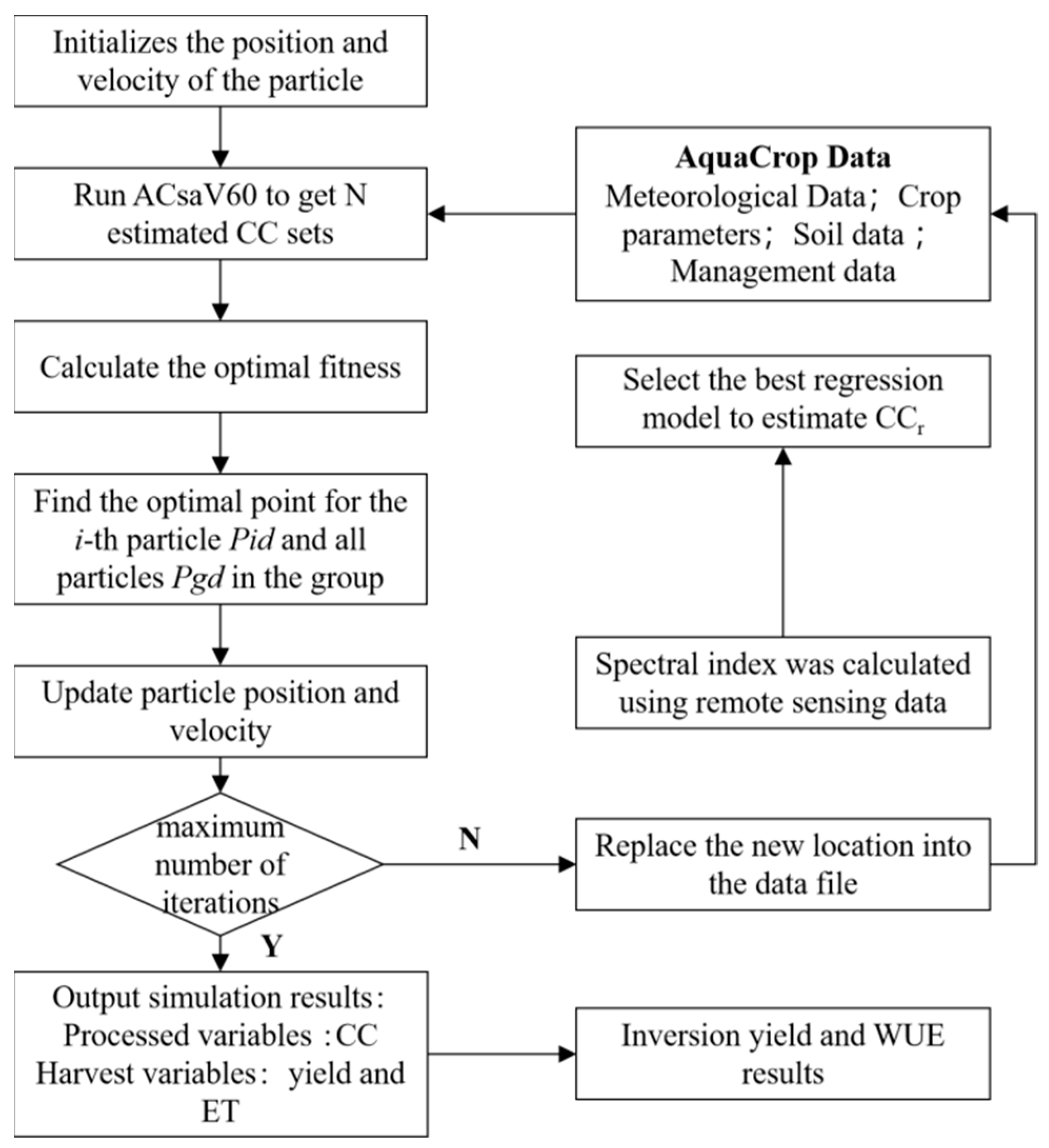
- The initial value (position) and particle velocity are determined. The adjusted parameters include nine crop parameters, CCini, den, mcc, wp, hi, kcb, Tmg, Tupper, and Tbase. The initial values and value ranges of the parameters are shown in Table 5.
- (2)
- MATLAB was used to run the ACsaV60.exe plug-in, integrate with the required data, and output analog CC (CCs).
- (3)
- The PLSR regression model was used to estimate canopy coverage CC (CCr).
- (4)
- The cost function of CCs for model simulation and CCr for remote sensing inversion was constructed so that its value converges continuously until it reaches the minimum, at which time the optimization algorithm also finds the best input parameters. The cost function selected in this study is shown in Equation (11).
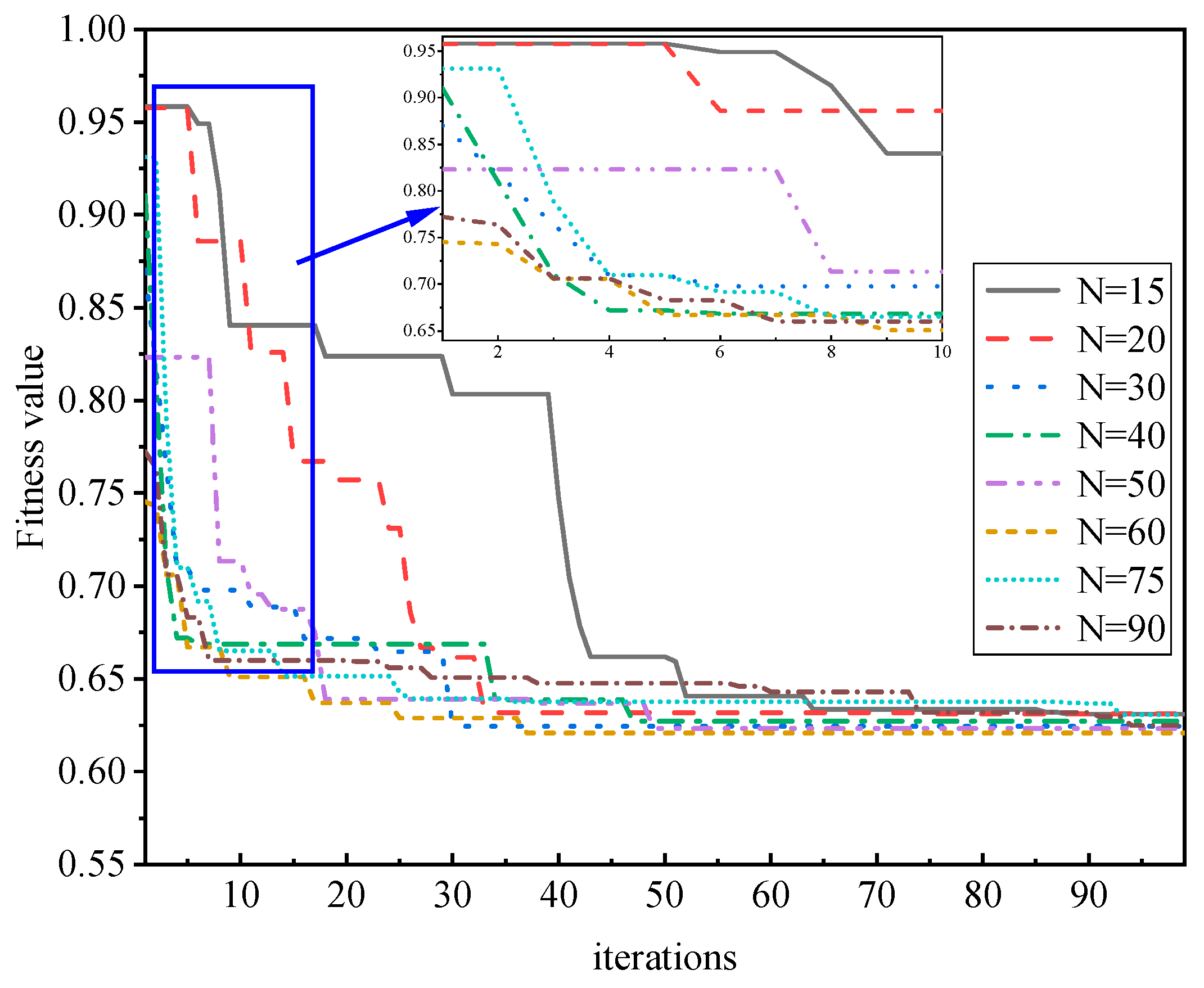
3.3.2. Optimal Fitness Analysis of Particle Swarm
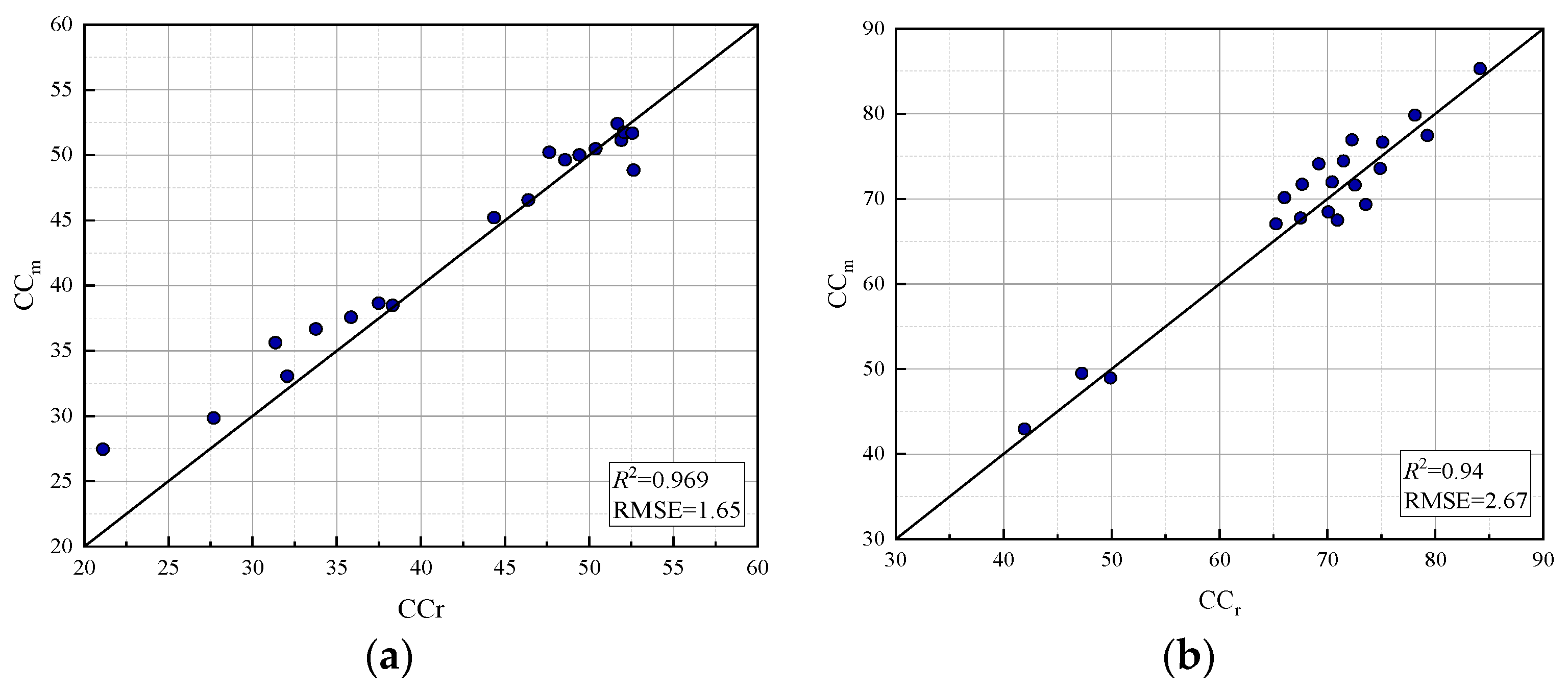
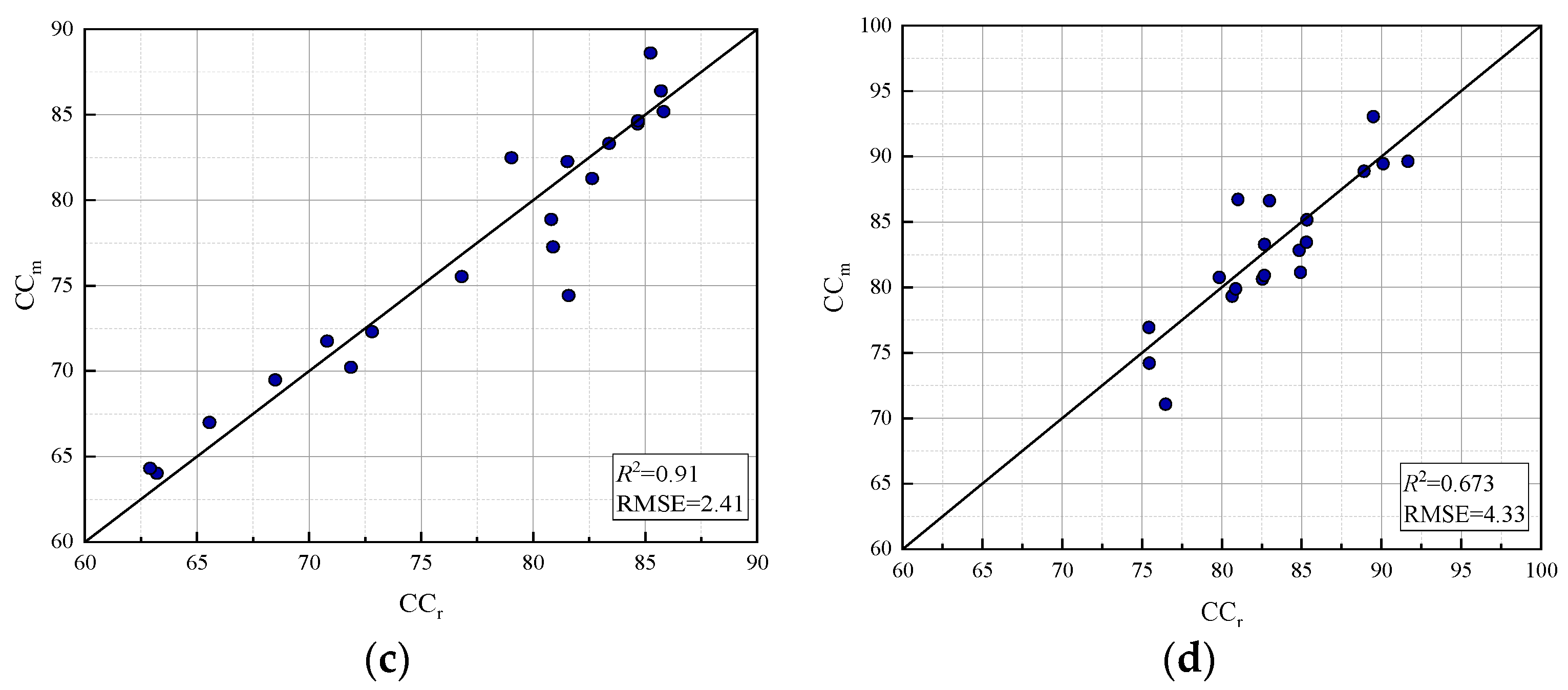
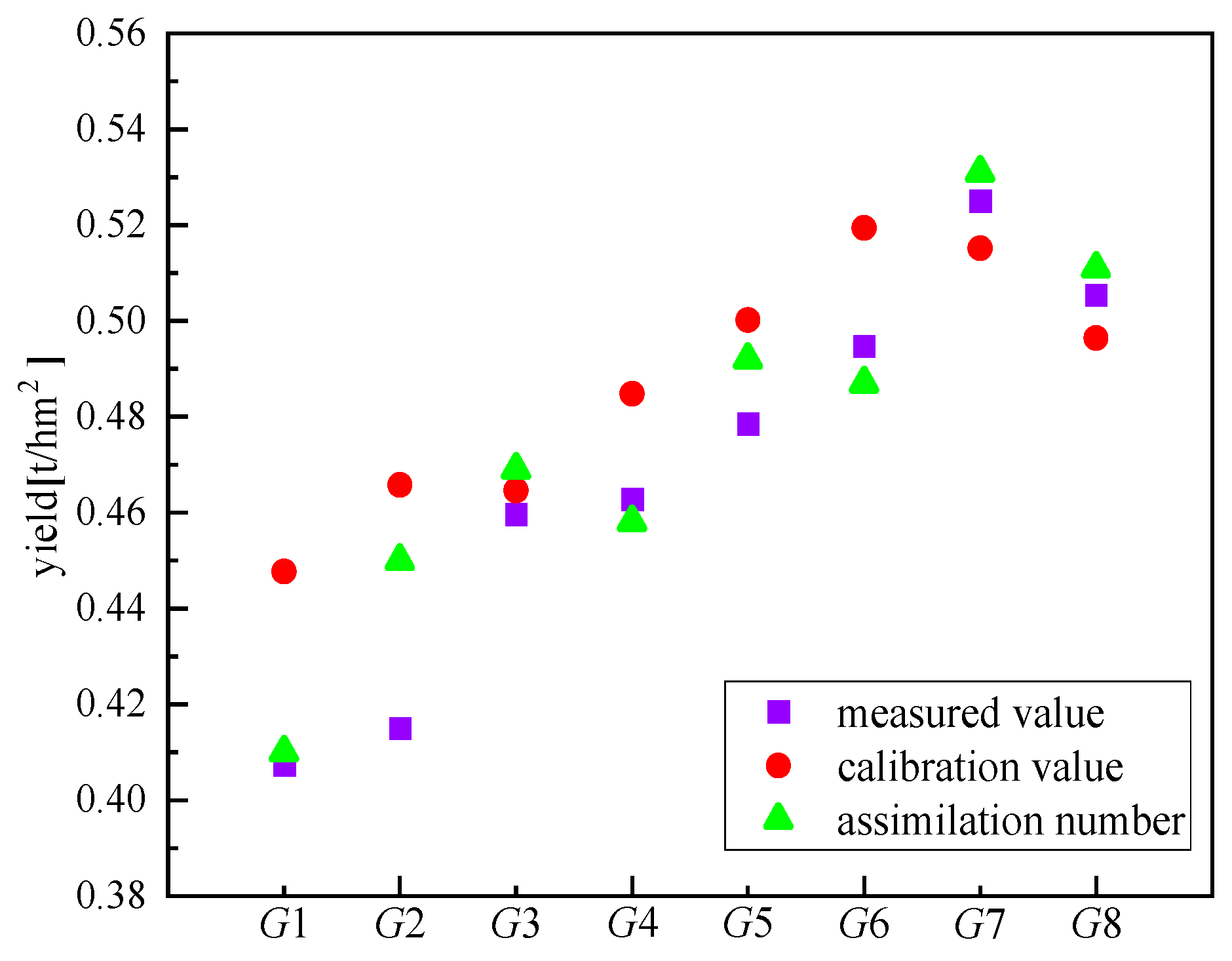
3.3.3. Estimation Accuracy Evaluation Based on Assimilation Model
4. Conclusions
- (1)
- Ten vegetation indices related to canopy coverage were selected, and their Pearson correlation coefficients were tested. Finally, six vegetation indices (NDVI, NDRE, GNDVI, LCI, OSAVI, and EVI) with correlations above 0.8 were selected to establish regression models with canopy coverage. The results showed that all vegetation indices had a significant regression relationship with canopy coverage. Except EVI, the logarithmic regression model had the best simulation effect, and the logarithmic regression model constructed by OSAVI had the highest estimation accuracy (R2 = 0.855).
- (2)
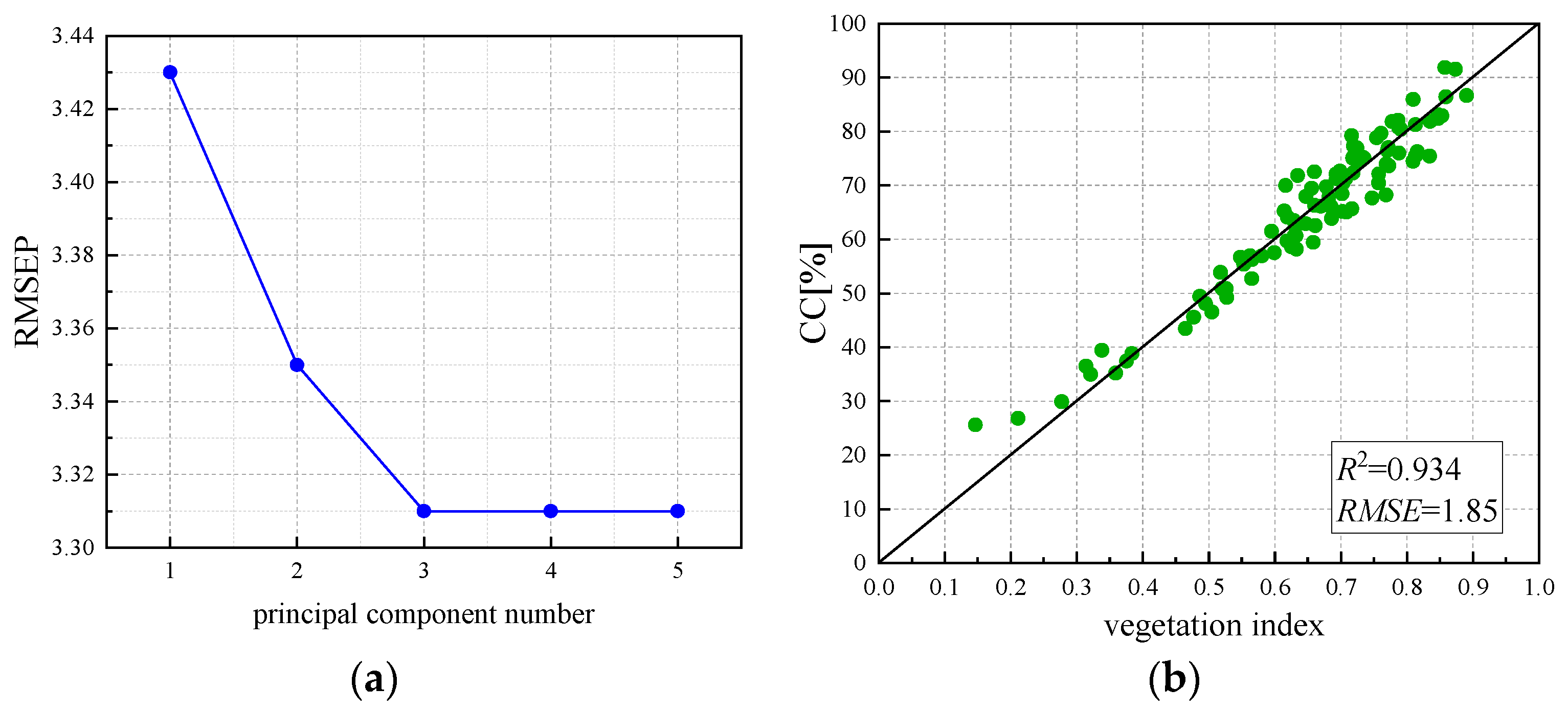
- Multiple vegetation indices (NDVI, NDRE, LCI, OSAVI, and EVI) were selected to construct a partial least squares regression model. RMSEP analysis found that the simulation accuracy was optimal when the principal component was 3. Therefore, NDVI, OSAVI, and EVI were selected to establish a PLSR model. The simulated and verified R2 and RMSE reached 0.93 and 1.85 and 0.94 and 2.26, respectively, which are the optimal regression models and can be used to invert tea canopy coverage.
- (3)
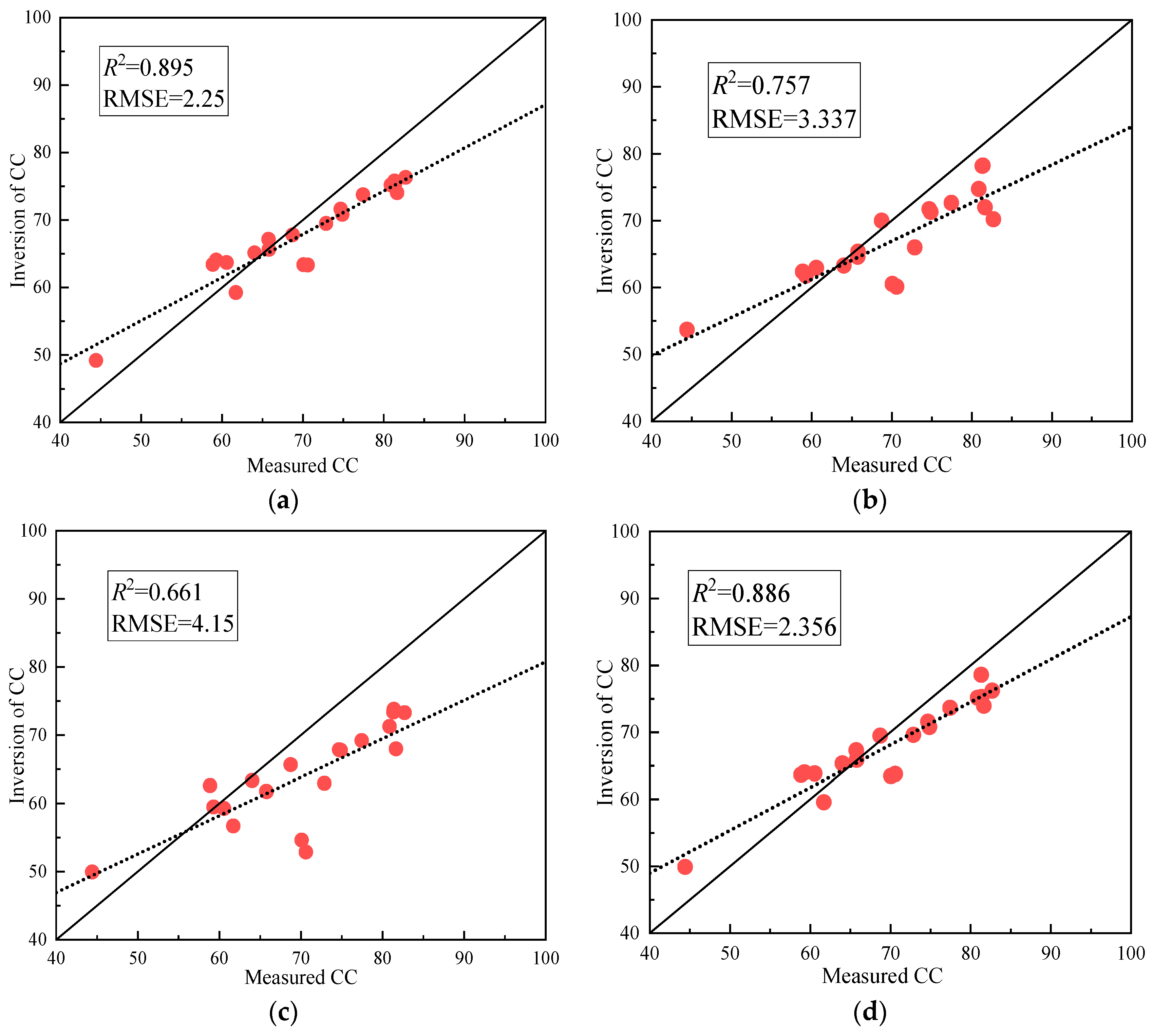
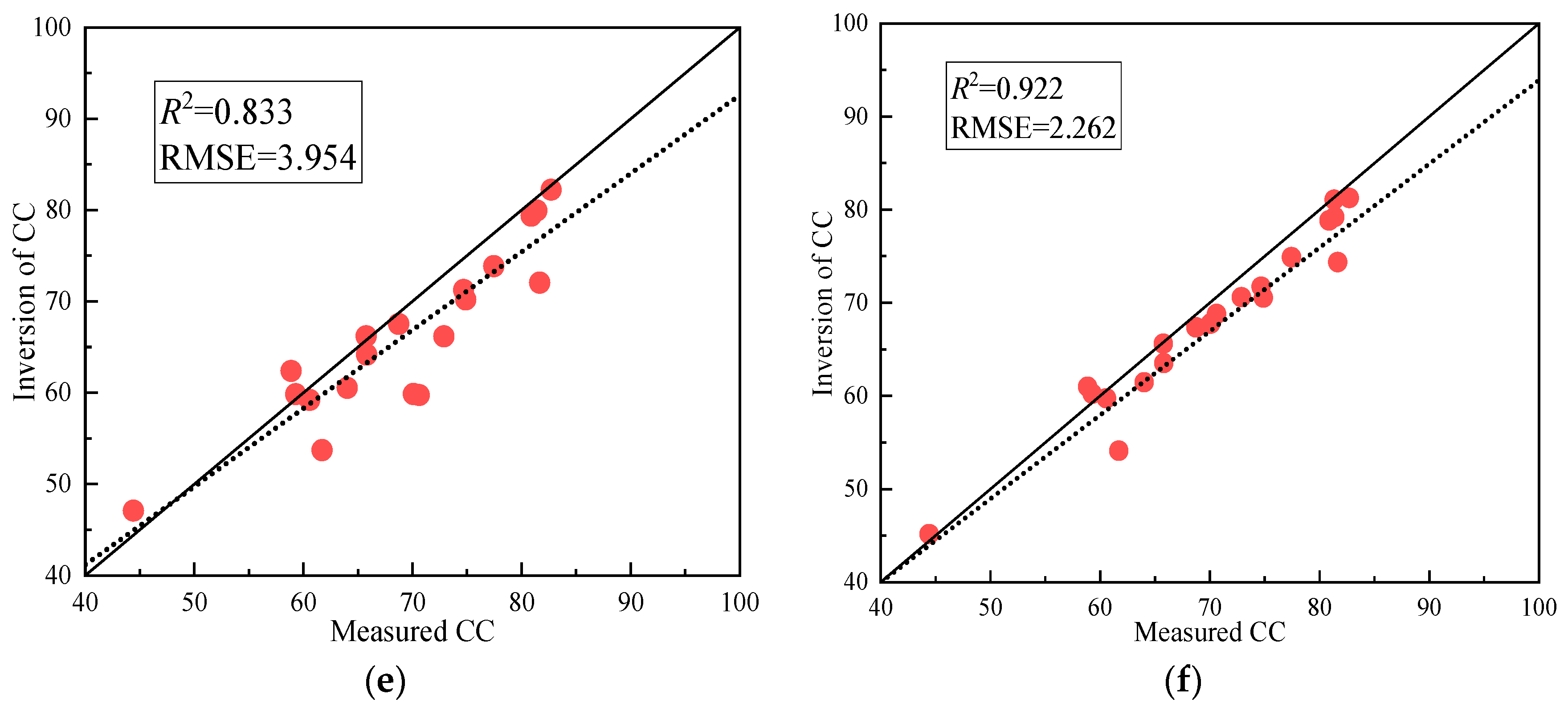
- AquaCrop-PSO was used to simulate the canopy coverage of tea in each growing period. The accuracy of spring, summer, and autumn was higher, and the R2 was above 0.9, while the accuracy of winter was lower, and the R2 was 0.67. In the simulation of production, R2 and RMSE simulated by AquaCrop-PSO were 0.927 and 0.12, which improved the simulation accuracy compared with the calibrated AquaCrop model.
5. Outlook
- (1)
- This study is based on the particle swarm optimization algorithm to conduct assimilation research on remote sensing data and crop models. Only one algorithm is selected to conduct assimilation research on remote sensing data and crop models. A variety of different assimilation algorithms should be selected for further analysis to enhance the applicability and expansibility of the assimilation model. Because the existing assimilation algorithms are slow and time-consuming, it is necessary to improve the assimilation efficiency if the assimilation calculation is to be carried out on a large regional scale.
- (2)
- This study was carried out based on the climatic conditions in the eastern coastal area of China, which are rainy and humid, so the model needs to be further adjusted and applied under similar climatic conditions in other regions. Meanwhile, the application of the assimilation model under other arid climatic conditions needs to be tested and explored.
- (3)
- The crop studied in this paper is tea. As a water-loving crop, the simulation accuracy of the growth model of tea may change when compared with that of other xerophytic crops. The next step is to design other crop experiments on this basis, collect the actual parameters of different crops, and compare and analyze the crop parameters under simulated and measured conditions.
6. Patents
- (1)
- An intelligent decision system for farmland irrigation based on digital word generation (patent number: 202211508391.9).
- (2)
- An intelligent farmland irrigation decision-making system based on the remote sensing data inversion of an unmanned aerial vehicle (patent number: 202110604577.3).
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Guan, Y.; Tian, X.; Zhang, W.; Marino, A.; Huang, J.; Mao, Y.; Zhao, H. Forest Canopy Cover Inversion Exploration Using Multi-Source Optical Data and Combined Methods. Forests 2023, 14, 1527. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F.; Myneni, R.; Pragnère, A.; Knyazikhin, Y. Investigation of a model inversion technique to estimate canopy biophysical variables from spectral and directional reflectance data. Agronomie 2000, 20, 3–22. [Google Scholar] [CrossRef]
- Schlerf, M.; Atzberger, C. Inversion of a forest reflectance model to estimate structural canopy variables from hyperspectral remote sensing data. Remote Sens. Environ. 2006, 100, 281–294. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.M.; Hussain, S.; Shaheen, A.; Aslam, B.; Liu, C.; Ali, A. Assessment of optimal flying height and timing using high-resolution unmanned aerial vehicle images in precision agriculture. Int. J. Environ. Sci. Technol. 2022, 19, 2703–2720. [Google Scholar] [CrossRef]
- Awais, M.; Li, W.; Cheema, M.J.; Zaman, Q.U.; Shaheen, A.; Aslam, B.; Zhu, W.; Ajmal, M.; Faheem, M.; Hussain, S.; et al. UAV-based remote sensing in plant stress imagine using high-resolution thermal sensor for digital agriculture practices: A meta-review. Int. J. Environ. Sci. Technol. 2022, 20, 1135–1152. [Google Scholar] [CrossRef]
- Woodcock, C.E.; Collins, J.B.; Jakabhazy, V.D.; Li, X.; Macomber, S.A.; Wu, Y. Inversion of the Li-Strahler canopy reflectance model for map** forest structure. IEEE Trans. Geosci. Remote Sens. 1997, 35, 405–414. [Google Scholar] [CrossRef]
- Soenen, S.A.; Peddle, D.R.; Hall, R.J. Estimating aboveground forest biomass from canopy reflectance model inversion in mountainous terrain. Remote Sens. Environ. 2010, 114, 1325–1337. [Google Scholar] [CrossRef]
- Bye, I.J.; North, P.R.; Los, S.O.; Kljun, N.; Rosette, J.A.B.; Hopkinson, C.; Chasmer, L.; Mahoney, C. Estimating forest canopy parameters from satellite waveform LiDAR by inversion of the FLIGHT three-dimensional radiative transfer model. Remote Sens. Environ. 2017, 188, 177–189. [Google Scholar] [CrossRef]
- Vanuytrecht, E.; Raes, D.; Willems, P. Global sensitivity analysis of yield output from the water productivity model. Environ. Model. Softw. 2014, 51, 323–332. [Google Scholar] [CrossRef]
- Huang, J.; Gómez-Dans, J.L.; Huang, H.; Ma, H.; Wu, Q.; Lewis, P.E.; Liang, S.; Chen, Z.; Xue, J.H.; Wu, Y.; et al. Assimilation of remote sensing into crop growth models: Current status and perspectives. Agric. For. Meteorol. 2019, 276, 107609. [Google Scholar] [CrossRef]
- Araya, A.; Keesstra, S.D.; Stroosnijder, L. Simulating yield response to water of Teff (Eragrostis tef) with FAO’s AquaCrop model. Field Crops Res. 2010, 116, 196–204. [Google Scholar] [CrossRef]
- Luo, L.; Sun, S.; Xue, J.; Gao, Z.; Zhao, J.; Yin, Y.; Gao, F.; Luan, X. Crop yield estimation based on assimilation of crop models and remote sensing data: A systematic evaluation. Agric. Syst. 2023, 210, 103711. [Google Scholar] [CrossRef]
- Zhang, Y.; Walker, J.P.; Pauwels, V.R.; Sadeh, Y. Assimilation of wheat and soil states into the APSIM-wheat crop model: A case study. Remote Sens. 2021, 14, 65. [Google Scholar] [CrossRef]
- Jiang, Z.; Chen, Z.; Chen, J.; Liu, J.; Ren, J.; Li, Z.; Sun, L.; Li, H. Application of crop model data assimilation with a particle filter for estimating regional winter wheat yields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 4422–4431. [Google Scholar] [CrossRef]
- Wagner, M.P.; Slawig, T.; Taravat, A.; Oppelt, N. Remote sensing data assimilation in dynamic crop models using particle swarm optimization. ISPRS Int. J. Geo-Inf. 2020, 9, 105. [Google Scholar] [CrossRef]
- Launay, M.; Guerif, M. Assimilating remote sensing data into a crop model to improve predictive performance for spatial applications. Agric. Ecosyst. Environ. 2005, 111, 321–339. [Google Scholar] [CrossRef]
- Ziliani, M.G.; Altaf, M.U.; Aragon, B.; Houborg, R.; Franz, T.E.; Lu, Y.; Sheffield, J.; Hoteit, I.; McCabe, M.F. Early season prediction of within-field crop yield variability by assimilating CubeSat data into a crop model. Agric. For. Meteorol. 2022, 313, 108736. [Google Scholar] [CrossRef]
- Li, W.; Awais, M.; Ru, W.; Shi, W.; Ajmal, M.; Uddin, S.; Liu, C. Review of sensor network-based irrigation systems using IoT and remote sensing. Adv. Meteorol. 2020, 2020, 8396164. [Google Scholar] [CrossRef]
- Liu, X.; Li, X.; Peng, X.; Li, H.; He, J. Swarm intelligence for classification of remote sensing data. Sci. China Ser. D Earth Sci. 2008, 51, 79–87. [Google Scholar] [CrossRef]
- Guo, C.; Zhang, L.; Zhou, X.; Zhu, Y.; Cao, W.; Qiu, X.; Cheng, T.; Tian, Y. Integrating remote sensing information with crop model to monitor wheat growth and yield based on simulation zone partitioning. Precis. Agric. 2018, 19, 55–78. [Google Scholar] [CrossRef]
- Betbeder, J.; Fieuzal, R.; Baup, F. Assimilation of LAI and dry biomass data from optical and SAR images into an agro-meteorological model to estimate soybean yield. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2540–2553. [Google Scholar] [CrossRef]
- Liu, F.; Liu, X.; Ding, C.; Wu, L. The dynamic simulation of rice growth parameters under cadmium stress with the assimilation of multi-period spectral indices and crop model. Field Crops Res. 2015, 183, 225–234. [Google Scholar] [CrossRef]
- Guo, C.; Tang, Y.; Lu, J.; Zhu, Y.; Cao, W.; Cheng, T.; Zhang, L.; Tian, Y. Predicting wheat productivity: Integrating time series of vegetation indices into crop modeling via sequential assimilation. Agric. For. Meteorol. 2019, 272, 69–80. [Google Scholar] [CrossRef]
- Reichle, R.H. Data assimilation methods in the Earth sciences. Adv. Water Resour. 2008, 31, 1411–1418. [Google Scholar] [CrossRef]
- Li, W.; Liu, C.; Yang, Y.; Awais, M.; Li, W.; Ying, P.; Ru, W.; Cheema, M.J.M. A UAV-aided prediction system of soil moisture content relying on thermal infrared remote sensing. Int. J. Environ. Sci. Technol. 2022, 19, 9587–9600. [Google Scholar] [CrossRef]
- Shen, L.; Huang, X.; Fan, C. Double-group particle swarm optimization and its application in remote sensing image segmentation. Sensors 2018, 18, 1393. [Google Scholar] [CrossRef] [PubMed]
- Bansal, S.; Gupta, D.; Panchal, V.K.; Kumar, S. Swarm intelligence inspired classifiers in comparison with fuzzy and rough classifiers: A remote sensing approach. In Proceedings of the Contemporary Computing: Second International Conference, IC3 2009, Noida, India, 17–19 August 2009; Proceedings 2. Springer: Berlin/Heidelberg, Germany, 2009; pp. 284–294. [Google Scholar]
- Jin, M.; Liu, X.; Wu, L.; Liu, M. An improved assimilation method with stress factors incorporated in the WOFOST model for the efficient assessment of heavy metal stress levels in rice. Int. J. Appl. Earth Obs. Geoinf. 2015, 41, 118–129. [Google Scholar] [CrossRef]
- Silvestro, P.C.; Pignatti, S.; Pascucci, S.; Yang, H.; Li, Z.; Yang, G.; Huang, W.; Casa, R. Estimating wheat yield in China at the field and district scale from the assimilation of satellite data into the Aquacrop and simple algorithm for yield (SAFY) models. Remote Sens. 2017, 9, 509. [Google Scholar] [CrossRef]
- Li, Z.; Wang, J.; Xu, X.; Zhao, C.; Xi, X.; Yang, G.; Feng, H. Assimilation of two variables derived from hyperspectral data into the DSSAT-CERES model for grain yield and quality estimation. Remote Sens. 2015, 7, 12400–12418. [Google Scholar] [CrossRef]
- Son, N.T.; Chen, C.F.; Chen, C.R.; Chang, L.Y.; Chiang, S.H. Rice yield estimation through assimilating satellite data into a crop simumlation model. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 8, 993–996. [Google Scholar] [CrossRef]
- Jin, X.; Kumar, L.; Li, Z.; Xu, X.; Yang, G.; Wang, J. Estimation of winter wheat biomass and yield by combining the aquacrop model and field hyperspectral data. Remote Sens. 2016, 8, 972. [Google Scholar] [CrossRef]
- Jibo, Y.; Haikuan, F.; Xiudong, Q. Monitor key parameters of winter wheat using Crop model. IOP Conf. Ser. Earth Environ. Sci. 2016, 46, 012001. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, Z.; Chen, Y.; Zhang, L.; Tao, F. Improving regional wheat yields estimations by multi-step-assimilating of a crop model with multi-source data. Agric. For. Meteorol. 2020, 290, 107993. [Google Scholar] [CrossRef]
- Yang, Q.; Shi, L.; Han, J.; Zha, Y.; Yu, J.; Wu, W.; Huang, K. Regulating the time of the crop model clock: A data assimilation framework for regions with high phenological heterogeneity. Field Crops Res. 2023, 293, 108847. [Google Scholar] [CrossRef]
- Yang, C.; Lei, H. Evaluation of data assimilation strategies on improving the performance of crop modeling based on a novel evapotranspiration assimilation framework. Agric. For. Meteorol. 2024, 346, 109882. [Google Scholar] [CrossRef]
- Dlamini, L.; Crespo, O.; van Dam, J.; Kooistra, L. A Global Systematic Review of Improving Crop Model Estimations by Assimilating Remote Sensing Data: Implications for Small-Scale Agricultural Systems. Remote Sens. 2023, 15, 4066. [Google Scholar] [CrossRef]
- Lidón, A.; Ginestar, D.; Carlos, S.; Sánchez-De-Oleo, C.; Jaramillo, C.; Ramos, C. Sensitivity analysis and parameterization of two agricultural models in cauliflower crops. Span. J. Agric. Res. 2019, 17, e1106. [Google Scholar] [CrossRef]
- Akinseye, F.M.; Folorunsho, A.H.; Hakeem, A.; Agele, S.O. Impacts of rainfall and temperature on photoperiod insensitive sorghum cultivar: Model evaluation and sensitivity analysis. J. Agrometeorol. 2019, 21, 262–269. [Google Scholar] [CrossRef]
- Xu, M.; Wang, C.; Ling, L.; Batchelor, W.D.; Zhang, J.; Kuai, J. Sensitivity analysis of the CROPGRO-Canola model in China: A case study for rapeseed. PLoS ONE 2021, 16, e0259929. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Guo, D.; Zhao, R.; Ling, X.; Ma, X. Global sensitivity and uncertainty analysis of the AquaCrop model for maize under different irrigation and fertilizer management conditions. Arch. Agron. Soil Sci. 2020, 66, 1115–1133. [Google Scholar] [CrossRef]
- Sweetapple, C.; Fu, G.; Butler, D. Identifying key sources of uncertainty in the modelling of greenhouse gas emissions from wastewater treatment. Water Res. 2013, 47, 4652–4665. [Google Scholar] [CrossRef]
- Jordan, C.F. Derivation of leaf-area index from quality of light on the forest floor. Ecology 1969, 50, 663–666. [Google Scholar] [CrossRef]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring vegetation systems in the Great Plains with ERTS. NASA Spec. Publ. 1974, 351, 309. [Google Scholar]
- Huete, A.R. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Baret, F.; Jacquemoud, S.; Hanocq, J.F. The soil line concept in remote sensing. Remote Sens. Rev. 1993, 7, 65–82. [Google Scholar] [CrossRef]
- Liu, H.Q.; Huete, A. A feedback based modification of the NDVI to minimize canopy background and atmospheric noise. IEEE Trans. Geosci. Remote Sens. 1995, 33, 457–465. [Google Scholar] [CrossRef]
- Gitelson, A.A. Wide dynamic range vegetation index for remote quantification of biophysical characteristics of vegetation. J. Plant Physiol. 2004, 161, 165–173. [Google Scholar] [CrossRef] [PubMed]
- Daughtry, C.S.T.; Gallo, K.P.; Goward, S.N.; Prince, S.D.; Kustas, W.P. Spectral estimates of absorbed radiation and phytomass production in corn and soybean canopies. Remote Sens. Environ. 1992, 39, 141–152. [Google Scholar] [CrossRef]
- Li, F.; Miao, Y.; Feng, G.; Yuan, F.; Yue, S.; Gao, X.; Liu, Y.; Liu, B.; Ustin, S.L.; Chen, X. Improving estimation of summer maize nitrogen status with red edge-based spectral vegetation indices. Field Crops Res. 2014, 157, 111–123. [Google Scholar] [CrossRef]
- Wu, C.; Niu, Z.; Tang, Q.; Huang, W. Estimating chlorophyll content from hyperspectral vegetation indices: Modeling and validation. Agric. For. Meteorol. 2008, 148, 1230–1241. [Google Scholar] [CrossRef]
- Jackson, R.D.; Huete, A.R. Interpreting vegetation indices. Prev. Vet. Med. 1991, 11, 185–200. [Google Scholar] [CrossRef]
- De Wit, A.J.W.; Van Diepen, C.A. Crop model data assimilation with the Ensemble Kalman filter for improving regional crop yield forecasts. Agric. For. Meteorol. 2007, 146, 38–56. [Google Scholar] [CrossRef]
- Lu, Y.; Chibarabada, T.P.; Ziliani, M.G.; Onema, J.M.K.; McCabe, M.F.; Sheffield, J. Assimilation of soil moisture and canopy cover data improves maize simulation using an under-calibrated crop model. Agric. Water Manag. 2021, 252, 106884. [Google Scholar] [CrossRef]
- Guerif, M.; Duke, C.L. Adjustment procedures of a crop model to the site specific characteristics of soil and crop using remote sensing data assimilation. Agric. Ecosyst. Environ. 2000, 81, 57–69. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Aircraft Parameters | Value |
|---|---|
| Takeoff weight | 1487 g |
| Diagonal wheelbase (without paddle) | 350 mm |
| Maximum flight altitude | 6000 m |
| Maximum ascent speed | 6 m/s (Automatic flight); 5 m/s (Manually operated vehicle) |
| Maximum descent speed | 3 m/s |
| Maximum horizontal flight speed | 50 km/h (positioning mode); 58 km/h (Attitude mode) |
| Time of flight | 27 min |
| Operating frequency | 5.725 GHz–5.850 GHz |
| Band | Wave Length (nm) | Bandwidth (nm) | Pixel Size |
|---|---|---|---|
| Red | 650 | 40 | 1.2 |
| Green | 560 | 40 | 1.2 |
| Blue | 450 | 40 | 1.2 |
| RedEdge | 730 | 10 | 1.2 |
| NIR | 840 | 40 | 1.2 |
| RGB | - | - | 16 |
| Vegetation Index | Formula |
|---|---|
| NDVI (normalized differential vegetation index) [38] | |
| NDRE (normalized difference red edge index) [39] | |
| WDRVI (wide dynamic range vegetation index) [40,41] | |
| MSR (modified simple ratio index) [42] | |
| GNDVI (green normalized differential vegetation index) [43] | |
| RVI (ratio vegetation index) [44] | |
| LCI (leaf surface chlorophyll index) [45] | |
| OSAVI (optimize soil regulation vegetation index) [46] | |
| SAVI (soil modified vegetation index) [47] | |
| EVI (enhanced vegetation index) [48] |
| Vegetation Index | Optimal Estimation Model | R2 | RMSE |
|---|---|---|---|
| NDVI | y = 90.589 + 40.618lnx | 0.835 | 6.135 |
| NDRE | y = 125.46 + 40.12lnx | 0.802 | 6.714 |
| LCI | y = 108.4 + 35.22lnx | 0.83 | 6.217 |
| OSAVI | y = 90.13 + 39.55lnx | 0.855 | 5.753 |
| EVI | y = 70.78x + 31.06 | 0.853 | 5.796 |
| PLSR | CC = 32.84NDVI + 26.39OSAVI + 31.824EVI + 16.563 | 0.934 | 1.85 |
| Model Parameter | Value | Scope |
|---|---|---|
| CCini | 60 | 57–63 |
| den | 5000 | 4750–5250 |
| mcc | 70 | 66–74 |
| wp | 12 | 11.4–12.6 |
| hi | 5 | 4.75–5.25 |
| kcb | 0.8 | 0.76–0.84 |
| Tmg | 7 | 6.65–7.35 |
| Tupper | 30 | 28.5–31.5 |
| Tbase | 7 | 6.65–7.35 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, W.; Li, M.; Awais, M.; Ji, L.; Li, H.; Song, R.; Cheema, M.J.M.; Agarwal, R. Research on Assimilation of Unmanned Aerial Vehicle Remote Sensing Data and AquaCrop Model. Sensors 2024, 24, 3255. https://doi.org/10.3390/s24103255
Li W, Li M, Awais M, Ji L, Li H, Song R, Cheema MJM, Agarwal R. Research on Assimilation of Unmanned Aerial Vehicle Remote Sensing Data and AquaCrop Model. Sensors. 2024; 24(10):3255. https://doi.org/10.3390/s24103255
Chicago/Turabian StyleLi, Wei, Manpeng Li, Muhammad Awais, Leilei Ji, Haoming Li, Rui Song, Muhammad Jehanzeb Masud Cheema, and Ramesh Agarwal. 2024. "Research on Assimilation of Unmanned Aerial Vehicle Remote Sensing Data and AquaCrop Model" Sensors 24, no. 10: 3255. https://doi.org/10.3390/s24103255
APA StyleLi, W., Li, M., Awais, M., Ji, L., Li, H., Song, R., Cheema, M. J. M., & Agarwal, R. (2024). Research on Assimilation of Unmanned Aerial Vehicle Remote Sensing Data and AquaCrop Model. Sensors, 24(10), 3255. https://doi.org/10.3390/s24103255