
Adaptive Convolution Sparse Filtering Method for the Fault Diagnosis of an Engine Timing Gearbox


Abstract
:1. Introduction
2. Materials and Methods
2.1. The Convolution Sparse Filtering Method
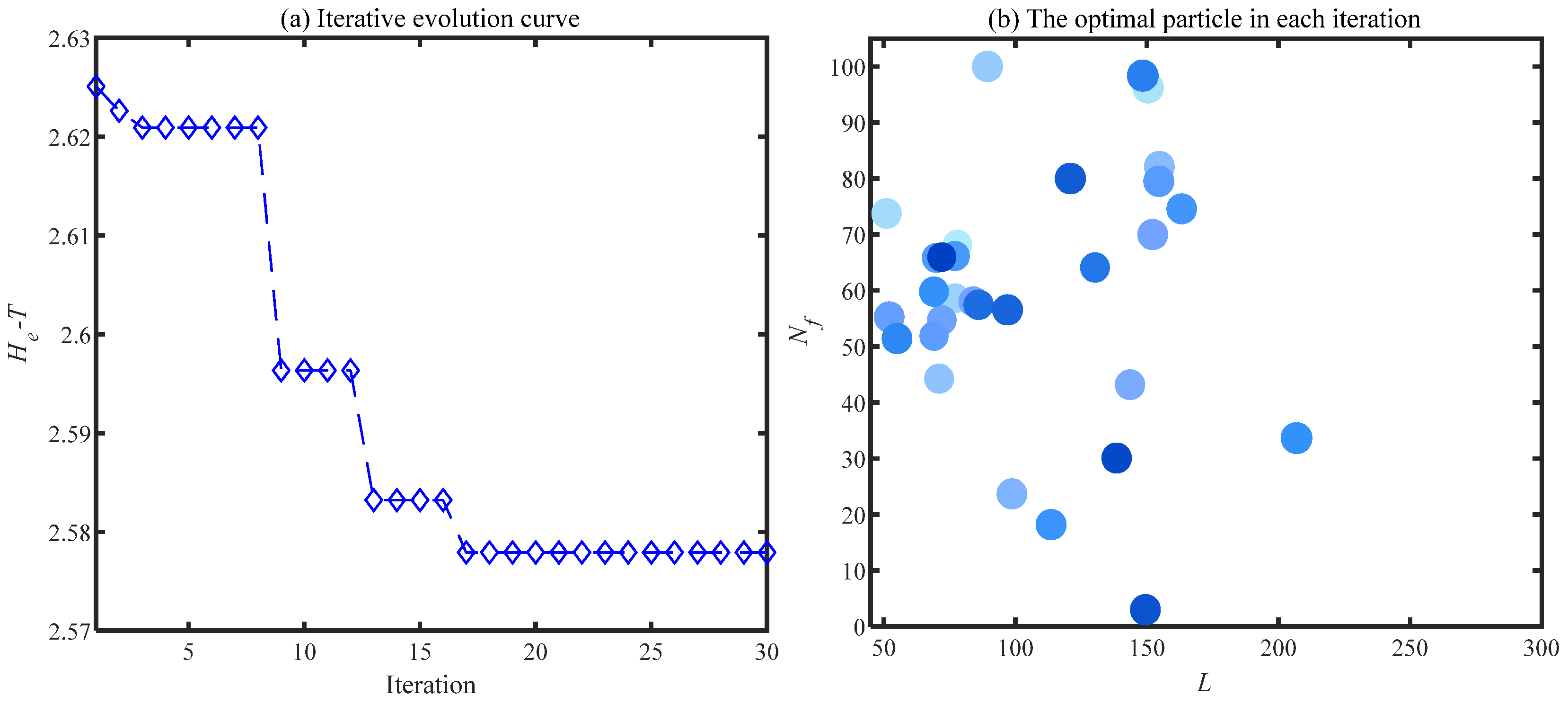
2.2. Particle Swarm Optimization
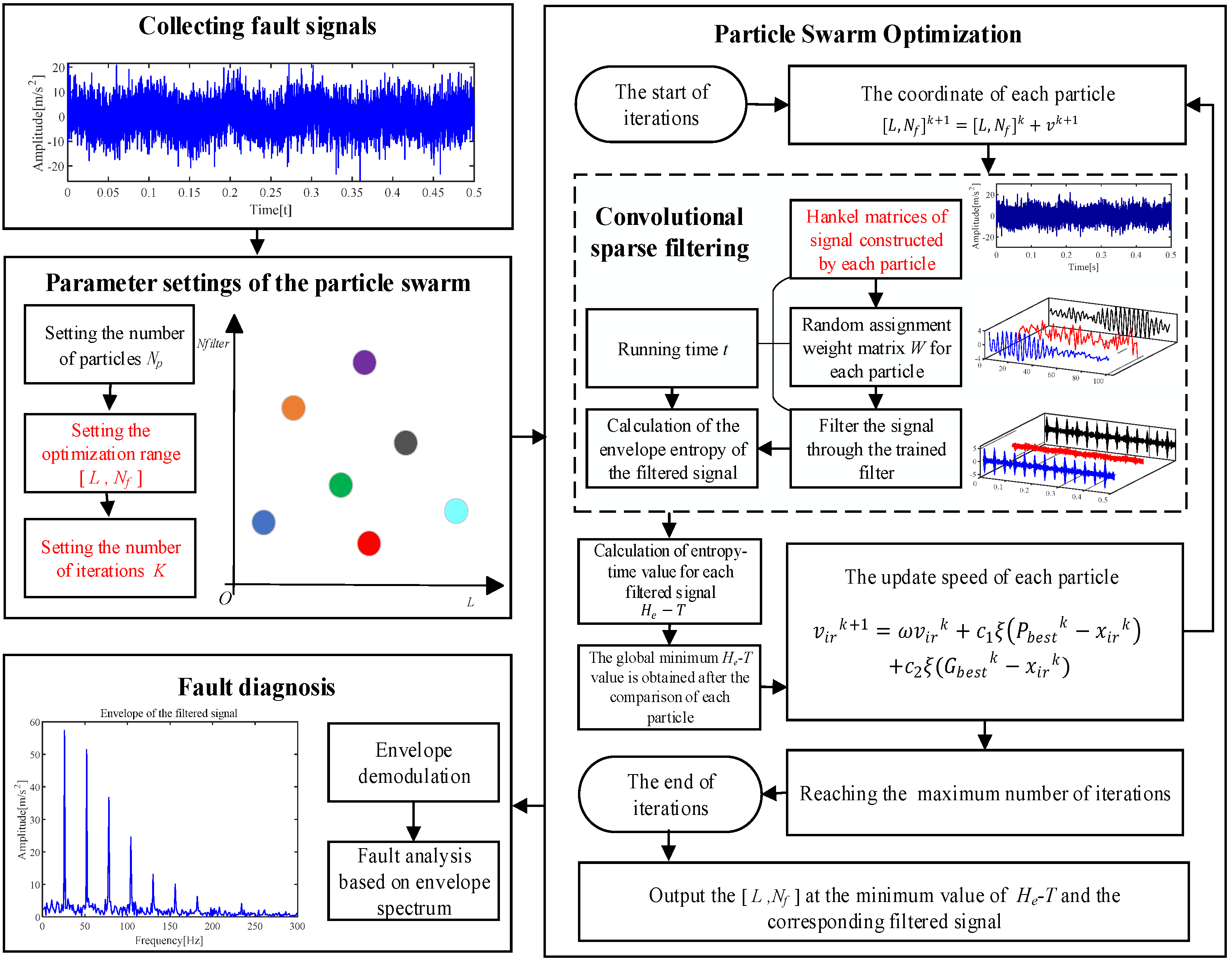
3. The Proposed Method
3.1. Entropy–Time Function
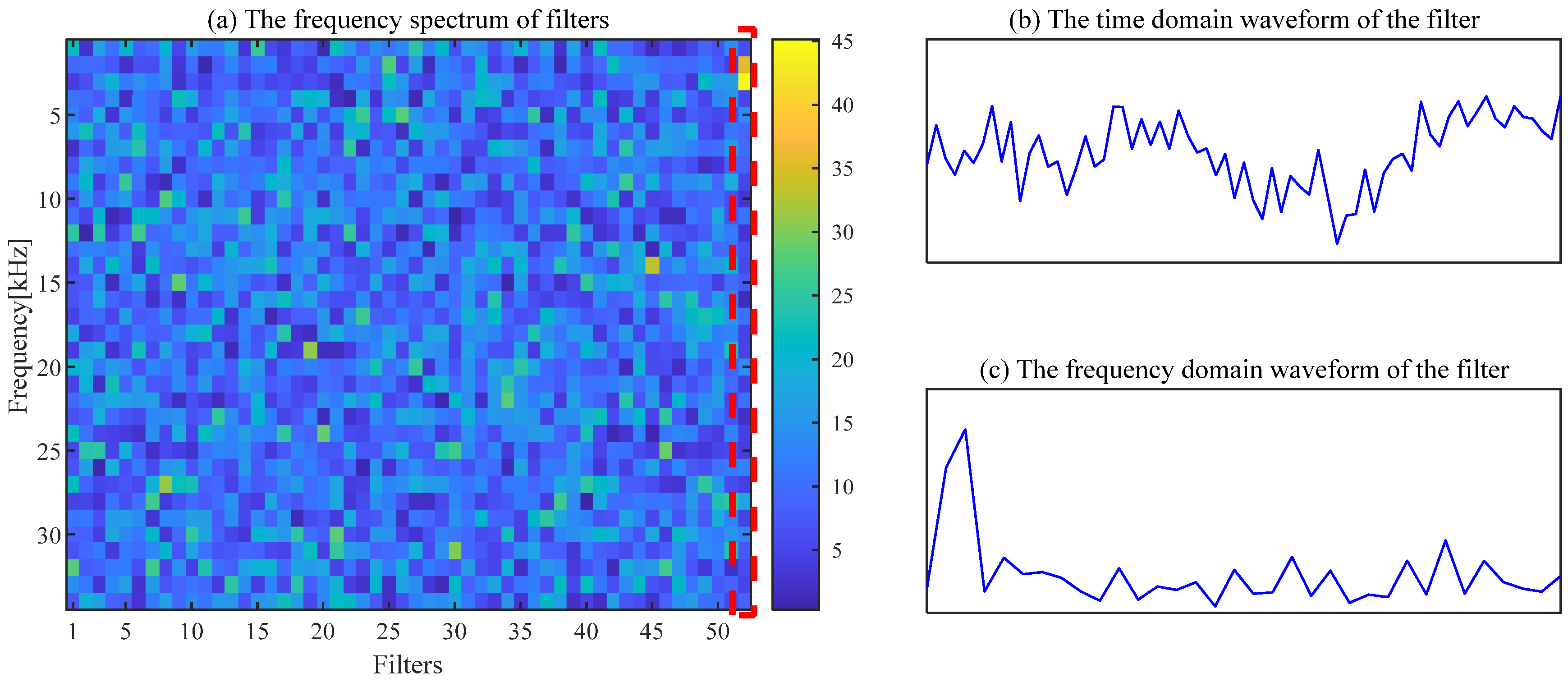
3.2. Adaptive Parameters Convolution Sparse Filtering Method
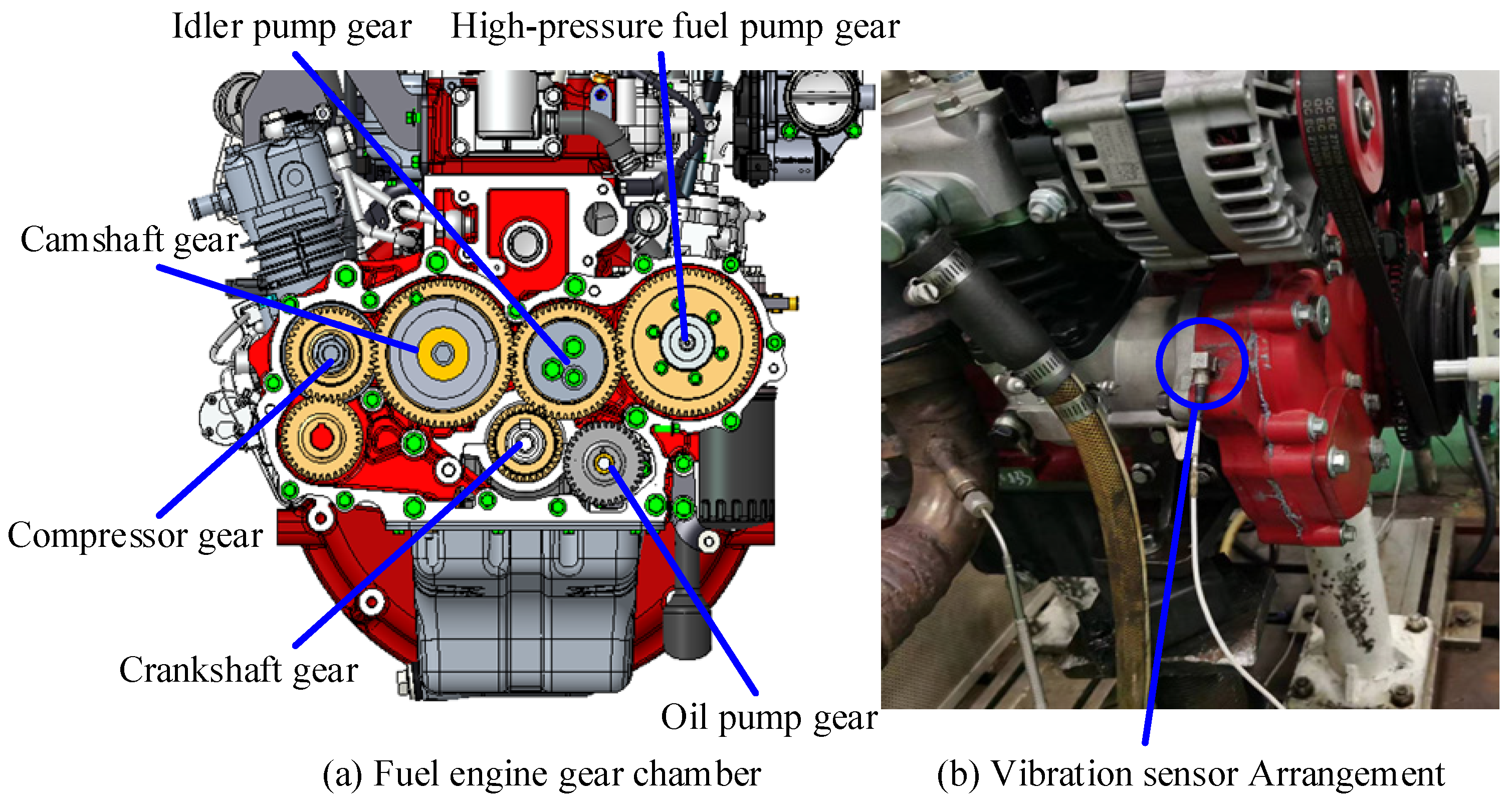
4. Experimental Verification
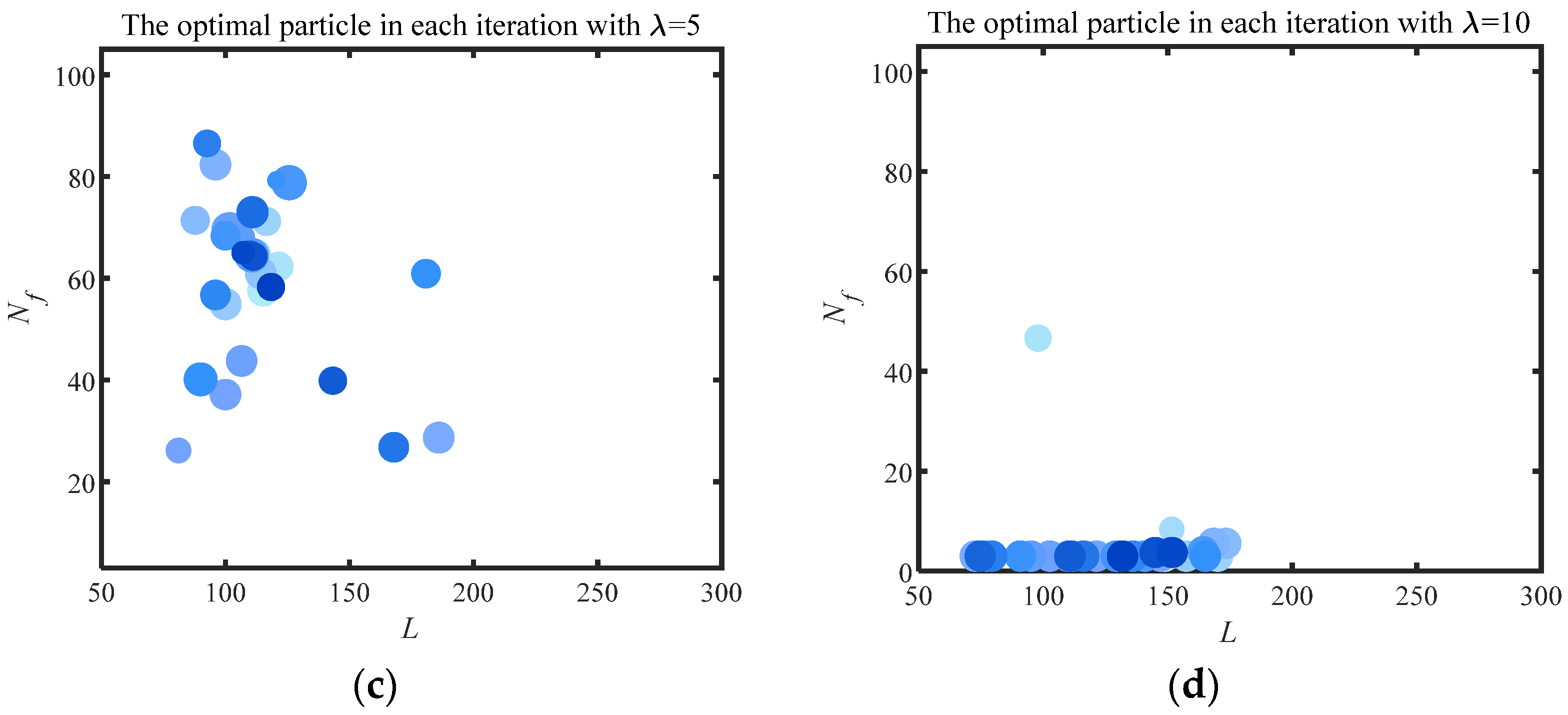
4.1. Discussion of Degradation Factor
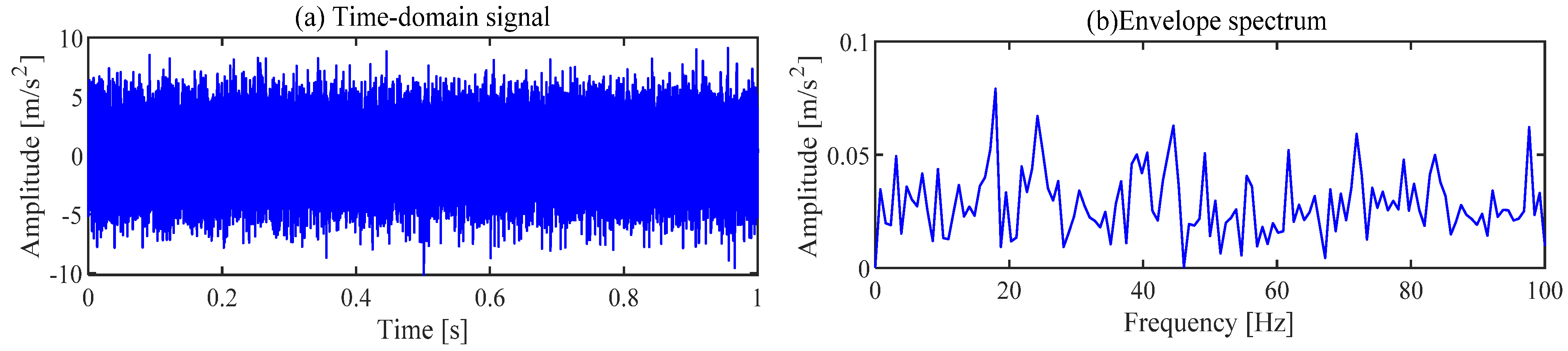
4.2. Gear Fault Feature Extraction
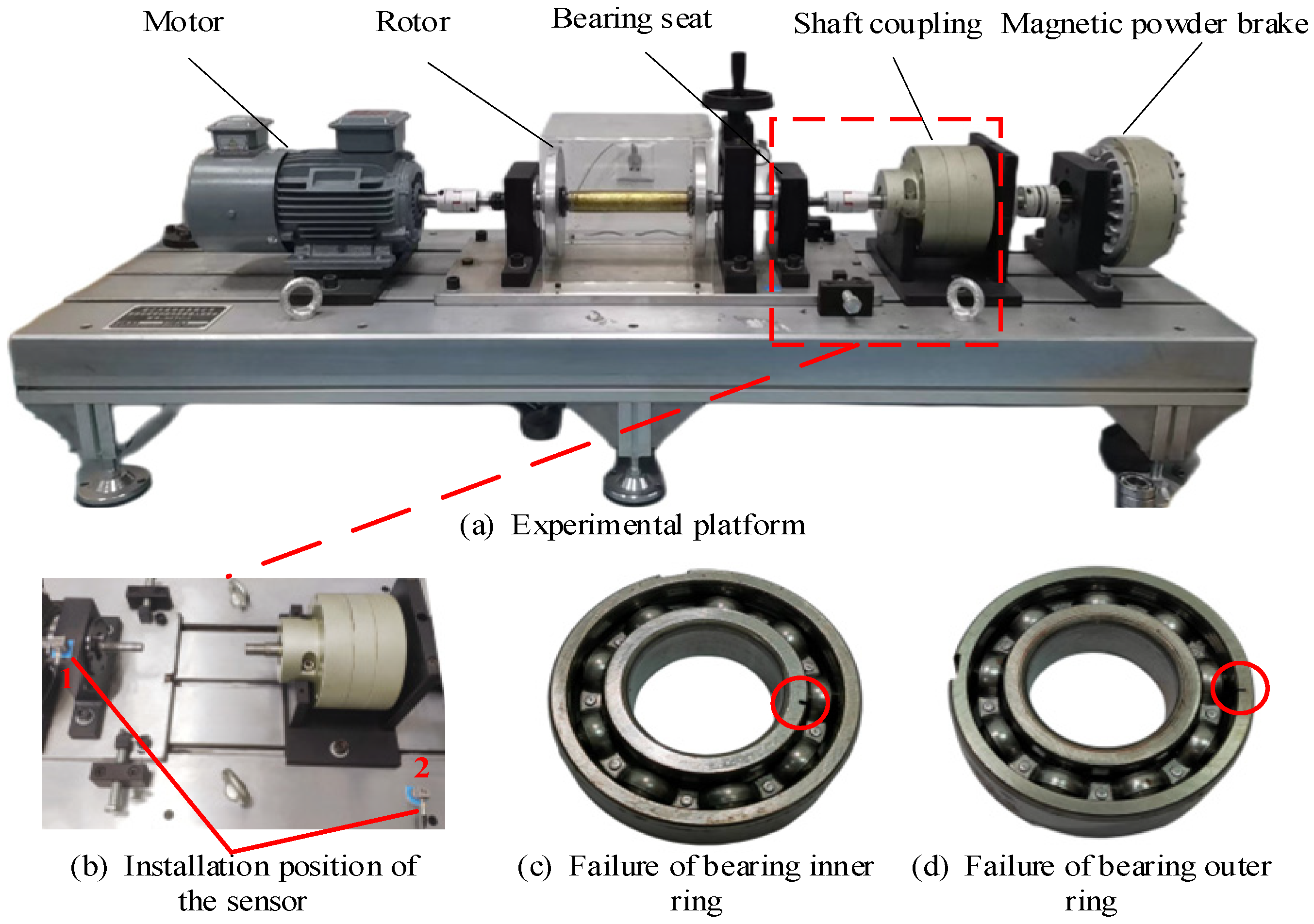
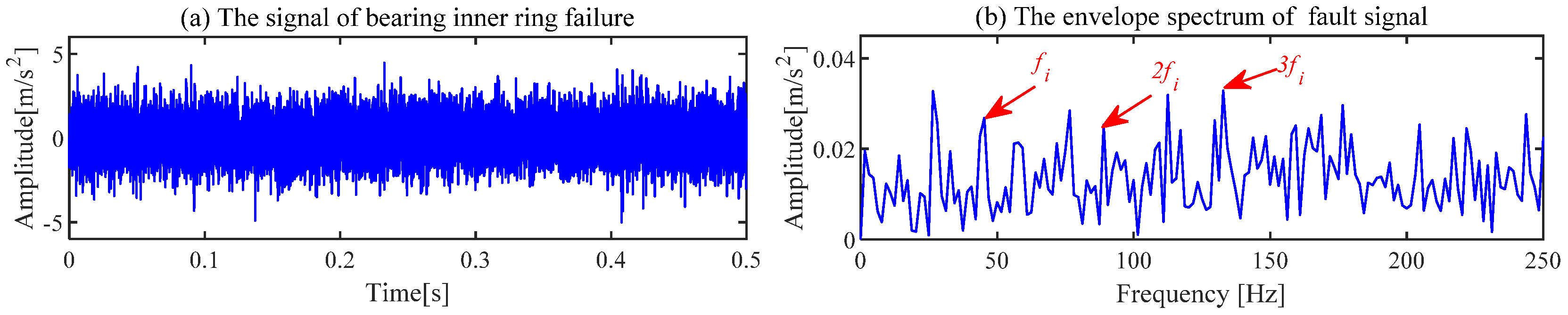
4.3. Bearing Fault Feature Extraction
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yang, Z.; Zhang, Z.; Wang, J.; Han, B.; Bao, H.; Liu, Z.; Li, S. Fast nonlinear Hoyergram for bearings fault diagnosis under random impact interference. Meas. Sci. Technol. 2022, 33, 075112. [Google Scholar] [CrossRef]
- Zhang, X.; Han, B.; Wang, J.; Zhang, Z.; Yan, Z. A novel transfer-learning method based on selective normalization for fault diagnosis with limited labeled data. Meas. Sci. Technol. 2021, 32, 105116. [Google Scholar] [CrossRef]
- Shao, H.; Li, W.; Cai, B.; Wan, J.; Xiao, Y.; Yan, S. Dual-Threshold Attention-Guided Gan and Limited Infrared Thermal Images for Rotating Machinery Fault Diagnosis Under Speed Fluctuation. IEEE Trans. Ind. Inform. 2023, 19, 9933–9942. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Cai, J.-H. Fault diagnosis of rolling bearing based on empirical mode decomposition and higher order statistics. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2015, 229, 1630–1638. [Google Scholar] [CrossRef]
- Zheng, J.; Su, M.; Ying, W.; Tong, J.; Pan, Z. Improved uniform phase empirical mode decomposition and its application in machinery fault diagnosis. Measurement 2021, 179, 109425. [Google Scholar] [CrossRef]
- Ye, X.; Hu, Y.; Shen, J.; Feng, R.; Zhai, G. An Improved Empirical Mode Decomposition Based on Adaptive Weighted Rational Quartic Spline for Rolling Bearing Fault Diagnosis. IEEE Access 2020, 8, 123813–123827. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Zhang, Y.; Randall, R.B. Rolling element bearing fault diagnosis based on the combination of genetic algorithms and fast kurtogram. Mech. Syst. Signal Process. 2009, 23, 1509–1517. [Google Scholar] [CrossRef]
- Han, B.; Yang, Z.; Zhang, Z.; Bao, H.; Wang, J.; Liu, Z.; Li, S. A novel rolling bearing fault diagnosis method based on generalized nonlinear spectral sparsity. Measurement 2022, 198, 111131. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2014, 62, 531–544. [Google Scholar] [CrossRef]
- Yi, C.; Lv, Y.; Dang, Z. A Fault Diagnosis Scheme for Rolling Bearing Based on Particle Swarm Optimization in Variational Mode Decomposition. Shock Vib. 2016, 2016, 9372691. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, J.; Hu, B.; Tang, J. Intelligent fault diagnosis of rolling bearings using variational mode decomposition and self-organizing feature map. J. Vib. Control 2020, 26, 1886–1897. [Google Scholar] [CrossRef]
- Lei, Y.; Jia, F.; Lin, J.; Xing, S.; Ding, S.X. An Intelligent Fault Diagnosis Method Using Unsupervised Feature Learning Towards Mechanical Big Data. IEEE Trans. Ind. Electron. 2016, 63, 3137–3147. [Google Scholar] [CrossRef]
- Jia, X.; Zhao, M.; Di, Y.; Jin, C.; Lee, J. Investigation on the kurtosis filter and the derivation of convolutional sparse filter for impulsive signature enhancement. J. Sound Vib. 2017, 386, 433–448. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, S.; Wang, J.; Xin, Y.; An, Z. General normalized sparse filtering: A novel unsupervised learning method for rotating machinery fault diagnosis. Mech. Syst. Signal Process. 2019, 124, 596–612. [Google Scholar] [CrossRef]
- Bao, H.; Yan, Z.; Ji, S.; Wang, J.; Jia, S.; Zhang, G.; Han, B. An Enhanced Sparse Filtering Method for Transfer Fault Diagnosis Using Maximum Classifier Discrepancy. Meas. Sci. Technol. 2021, 32, 085105. [Google Scholar] [CrossRef]
- Ji, S.; Han, B.; Zhang, Z.; Wang, J.; Lu, B.; Yang, J.; Jiang, X. Parallel sparse filtering for intelligent fault diagnosis using acoustic signal processing. Neurocomputing 2021, 462, 466–477. [Google Scholar] [CrossRef]
- Shi, Z.; Wang, J.; Bao, H.; Liu, G.; Zhang, G.; Gao, T. An identification method for mechanical fault diagnosis based on generalized matrix norm sparse filtering. Meas. Sci. Technol. 2021, 32, 125115. [Google Scholar] [CrossRef]
- Han, B.; Guo, L.; Wang, J.; Zhang, Z.; Zhang, G.; Jia, S. Fast general normalized convolutional sparse filtering via L1-L2 mixed norm for rotating machinery fault diagnosis. Measurement 2022, 198, 111136. [Google Scholar] [CrossRef]
- Cheng, C.; Wang, W.; Liu, H.; Pecht, M. Intelligent fault diagnosis using an unsupervised sparse feature learning method. Meas. Sci. Technol. 2020, 31, 095903. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Q.; Zhou, W. A Feature Extraction Method Based on Sparse Filtering With Local Structure Preserved and Its Applications to Bearing Fault Diagnosis. IEEE Access 2019, 7, 160559–160572. [Google Scholar] [CrossRef]
- Sun, J.; Xiao, Q.; Wen, J.; Wang, F. Natural gas pipeline small leakage feature extraction and recognition based on LMD envelope spectrum entropy and SVM. Measurement 2014, 55, 434–443. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear | Crankshaft Gear | Oil Pump Gear | Compressor Gear | Camshaft Gear | Idler Pump Gear | High-Pressure Fuel Pump Gear |
|---|---|---|---|---|---|---|
| Number of Teeth | 30 | 32 | 37 | 60 | 47 | 60 |
| Fault frequency | 40 Hz | 37.5 Hz | 32 Hz | 20 Hz | 25 Hz | 20 Hz |
| Parameter | Bearing | Ball Number | Ball Diameter | Outer Diameter | Inner Diameter | Contact Angle |
|---|---|---|---|---|---|---|
| value | 6205 | 9 | 7.938 | 52 mm | 25 mm | 0 deg |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fan, S.; Cai, Y.; Zhang, Z.; Wang, J.; Shi, Y.; Li, X. Adaptive Convolution Sparse Filtering Method for the Fault Diagnosis of an Engine Timing Gearbox. Sensors 2024, 24, 169. https://doi.org/10.3390/s24010169
Fan S, Cai Y, Zhang Z, Wang J, Shi Y, Li X. Adaptive Convolution Sparse Filtering Method for the Fault Diagnosis of an Engine Timing Gearbox. Sensors. 2024; 24(1):169. https://doi.org/10.3390/s24010169
Chicago/Turabian StyleFan, Shigong, Yixi Cai, Zongzhen Zhang, Jinrui Wang, Yunxi Shi, and Xiaohua Li. 2024. "Adaptive Convolution Sparse Filtering Method for the Fault Diagnosis of an Engine Timing Gearbox" Sensors 24, no. 1: 169. https://doi.org/10.3390/s24010169
APA StyleFan, S., Cai, Y., Zhang, Z., Wang, J., Shi, Y., & Li, X. (2024). Adaptive Convolution Sparse Filtering Method for the Fault Diagnosis of an Engine Timing Gearbox. Sensors, 24(1), 169. https://doi.org/10.3390/s24010169