
Automated Point Cloud Registration Approach Optimized for a Stop-and-Go Scanning System



Abstract
:1. Introduction
1.1. Background
1.2. Related Studies
1.2.1. Point Cloud Registration
1.2.2. Point Cloud Registration for Stop-and-Go Scanning System
1.3. Existing Problems and Research Objectives
- To present an automatic point cloud registration approach for the stop-and-go scanning system considering plane-based registration, which uses prior information from the localization of the mobile platform;
- To introduce a robust method capable of handling irregular scenarios with low overlap scan data;
- To evaluate the proposed method and compare it with conventional registration methods;
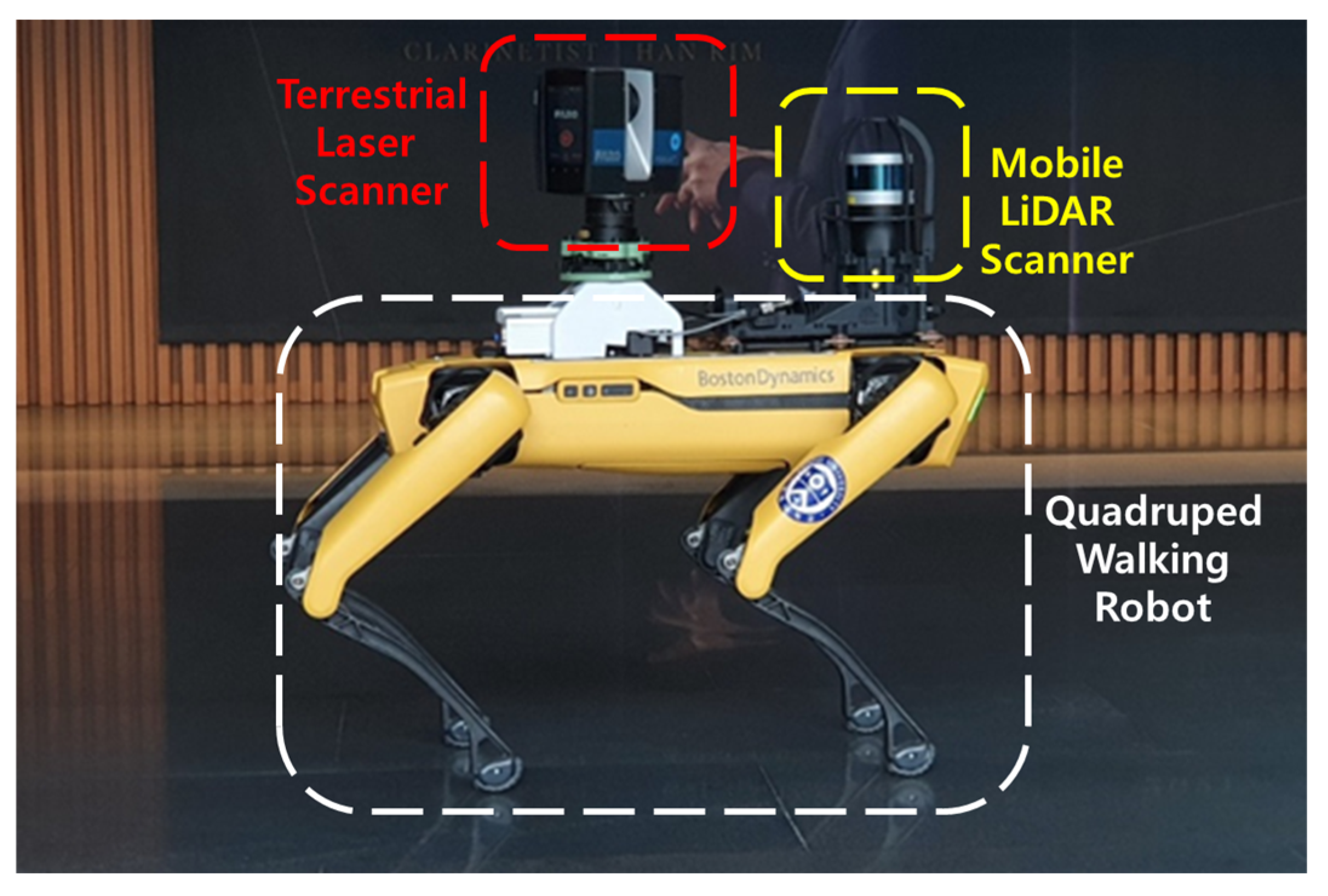
- Substantiation of the proposed method with the stop-and-go scanning system using the state-of-the-art mobile platform, quadruped walking robot in real-world indoor environments.
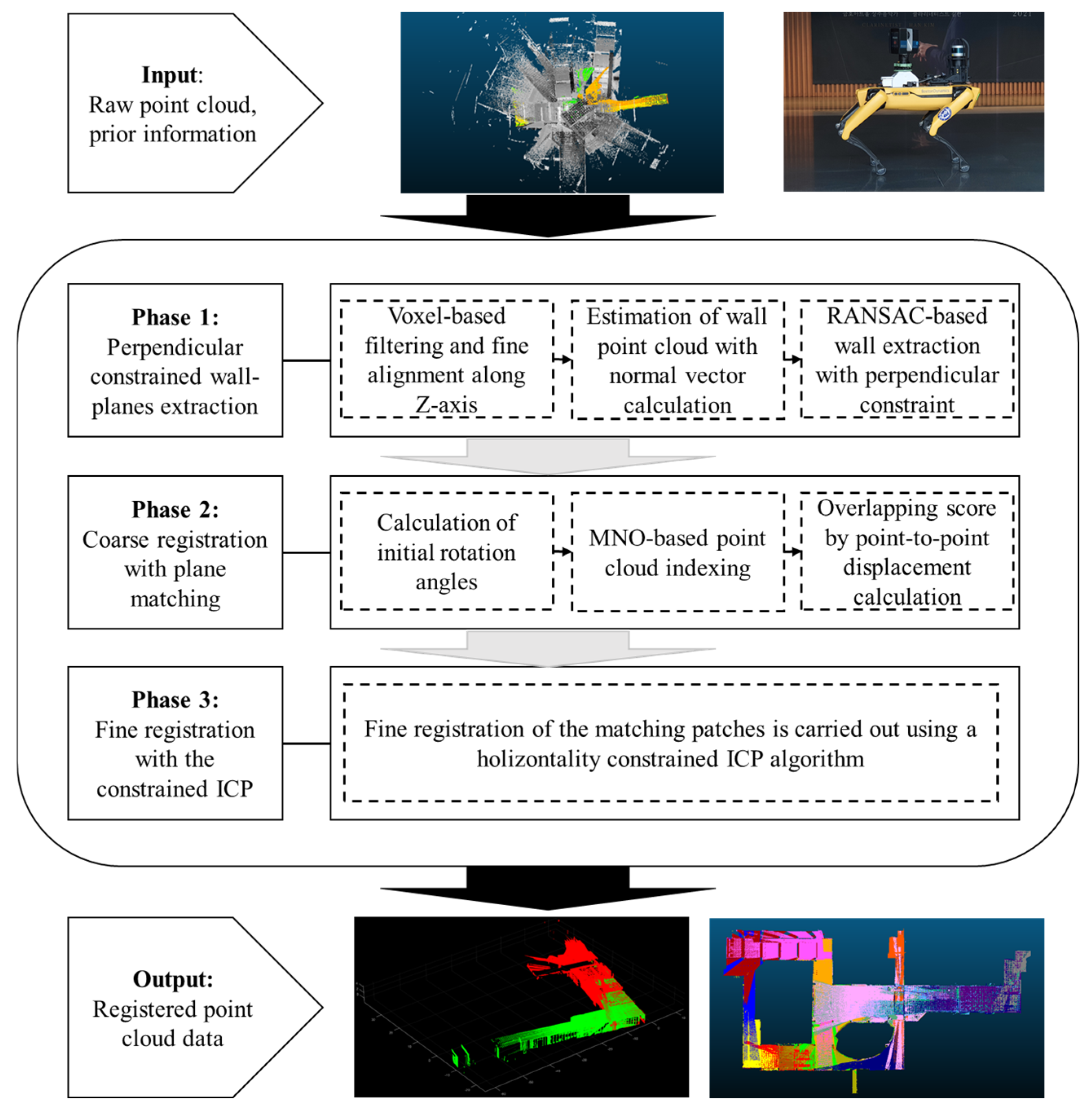
2. Methodology
2.1. Overview
- The approximate locations of TLS are known: It is assumed that the locations of the TLS scans are approximately known, and therefore, consideration for translations is not required during the coarse registration phase. This assumption is valid for most state-of-the-art mobile platforms, as they come equipped with their own localization function, enabling accurate location information for scan positions.
- Rotation around the z-axis is sufficient for registration. During the registration, only the rotation around the z-axis is needed to determine the correct rotations of the scans relative to each other. This assumption is reasonable because modern LiDAR scanners are typically equipped with a gyroscope sensor, and their output is correctly aligned with the gravity vector, pointing in the negative direction of the z-axis [36].
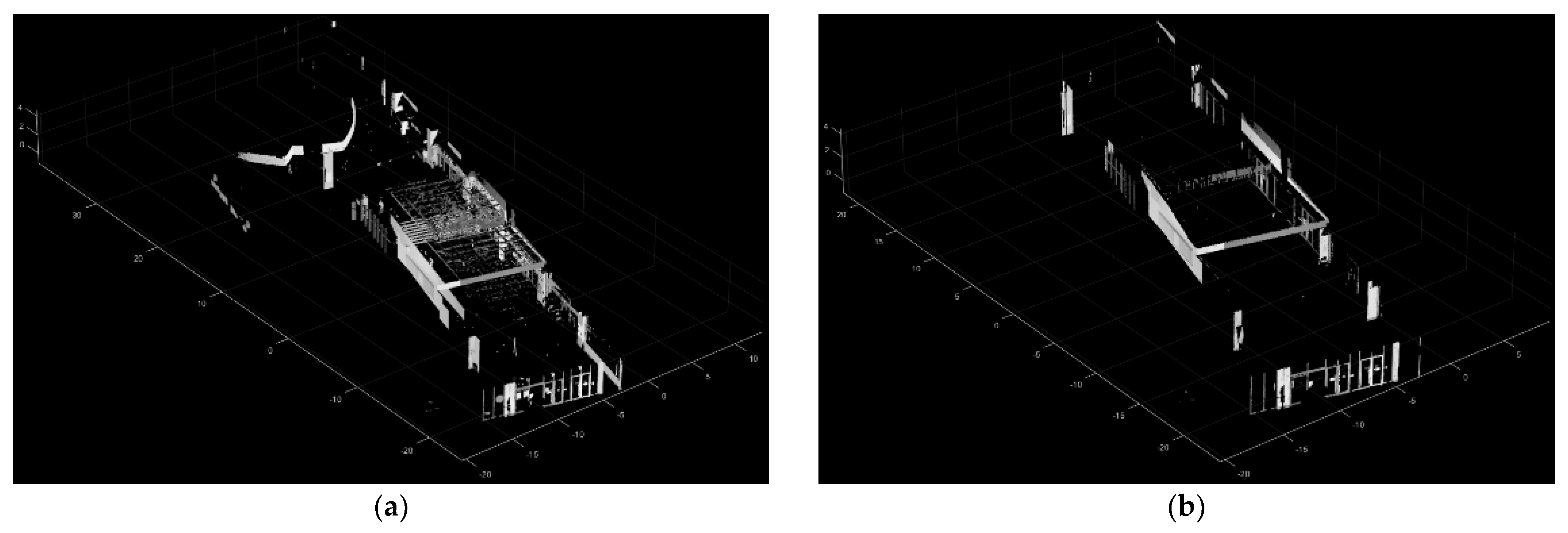
2.2. Perpendicular Constrained Wall-Plane Extraction
2.2.1. Voxel-Based Filtering and Alignment along the Z-Axis Subsubsection
2.2.2. Estimation of Wall Point Cloud with Normal Vector Calculation
- : a set of segmented points as wall,
2.2.3. RANSAC-Based Wall Extraction with Perpendicular Constraint
| Algorithm 1: The wall-plane extraction with the M-SAC algorithm |
| # Definition 1: ‘’ is defined as the set of segmented wall points. |
| # Definition 2: ‘plane_refer’ is defined as a set of wall planes with the reference vector. |
| # Definition 3: ‘plane_ortho’ is defined as a set of the perpendicular wall planes. |
| Input: |
Output: plane_refer, plane_ortho
|
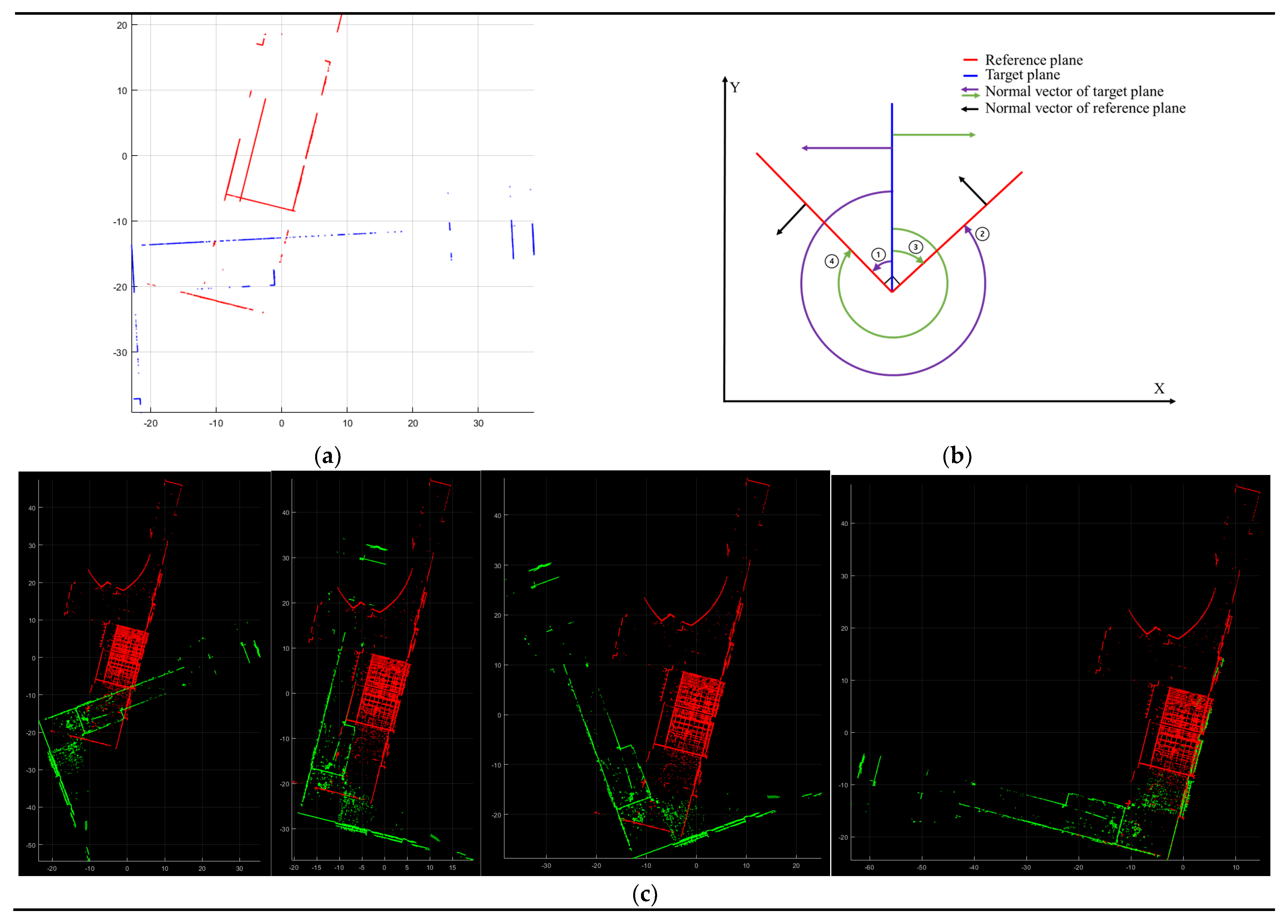
2.3. Coarse Registration with Plane Matching
2.3.1. Calculation of Rotation Angles for the Coarse Registration
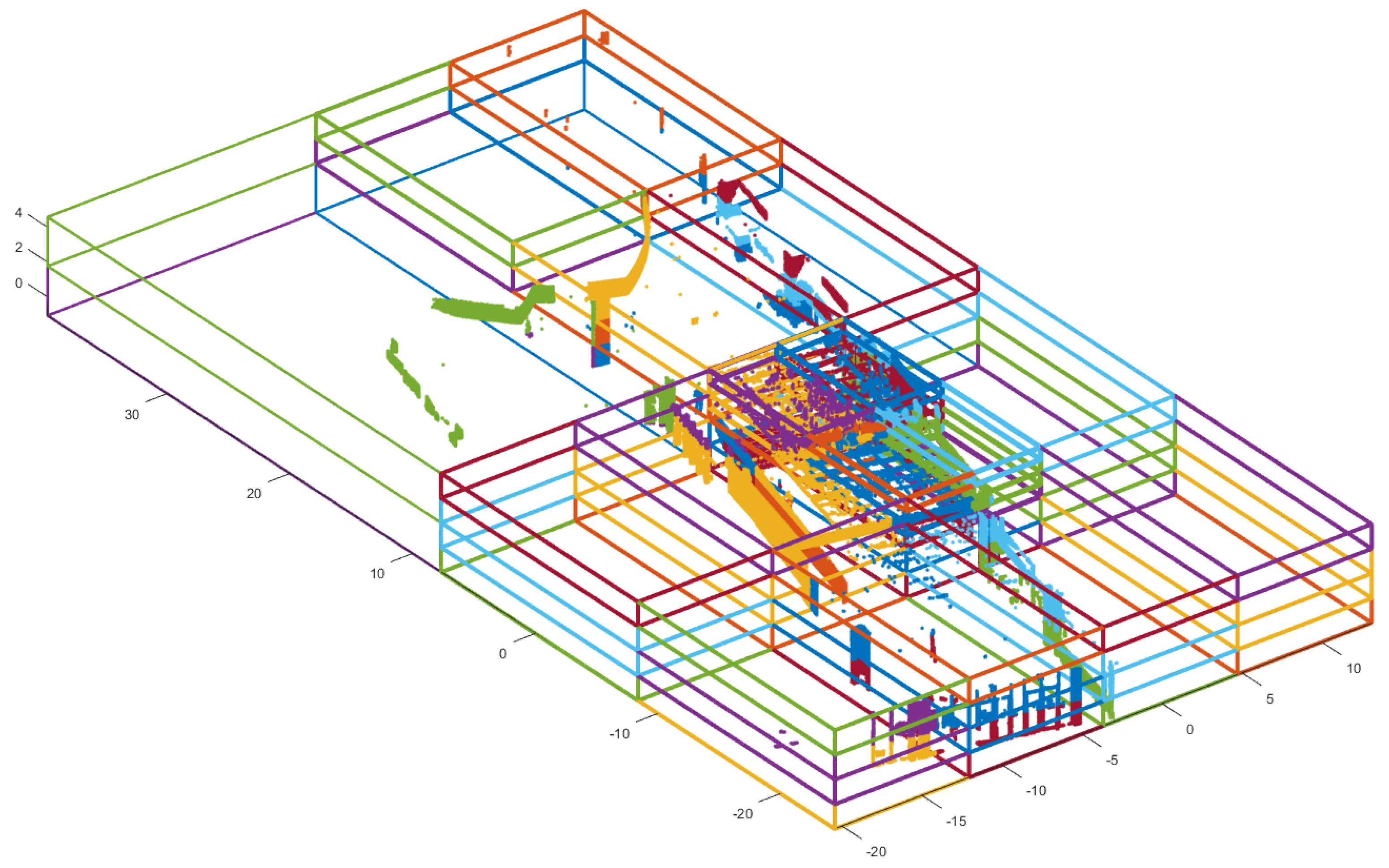
2.3.2. MNO-Based Point Cloud Indexing
2.3.3. Overlapping Score with Point-to-Point Displacement
| Algorithm 2: Calculation of the overlapping score in the MNO structure |
| # Definition 4: of the reference point cloud. |
| # Definition 5: of the target point cloud. |
| # Definition 6: ‘threshold’ is defined as a user-defined threshold. |
| # Definition 7: ‘overlap_score’ is defined as the overlapping score. |
| # Definition 8: ‘displacement2point’ is a function for calculating the displacement. |
| Input: reference_, target_, threshold |
Output: overlap_score
|
2.4. Fine Registration with Horizontality Constrained ICP
3. Experimental Results
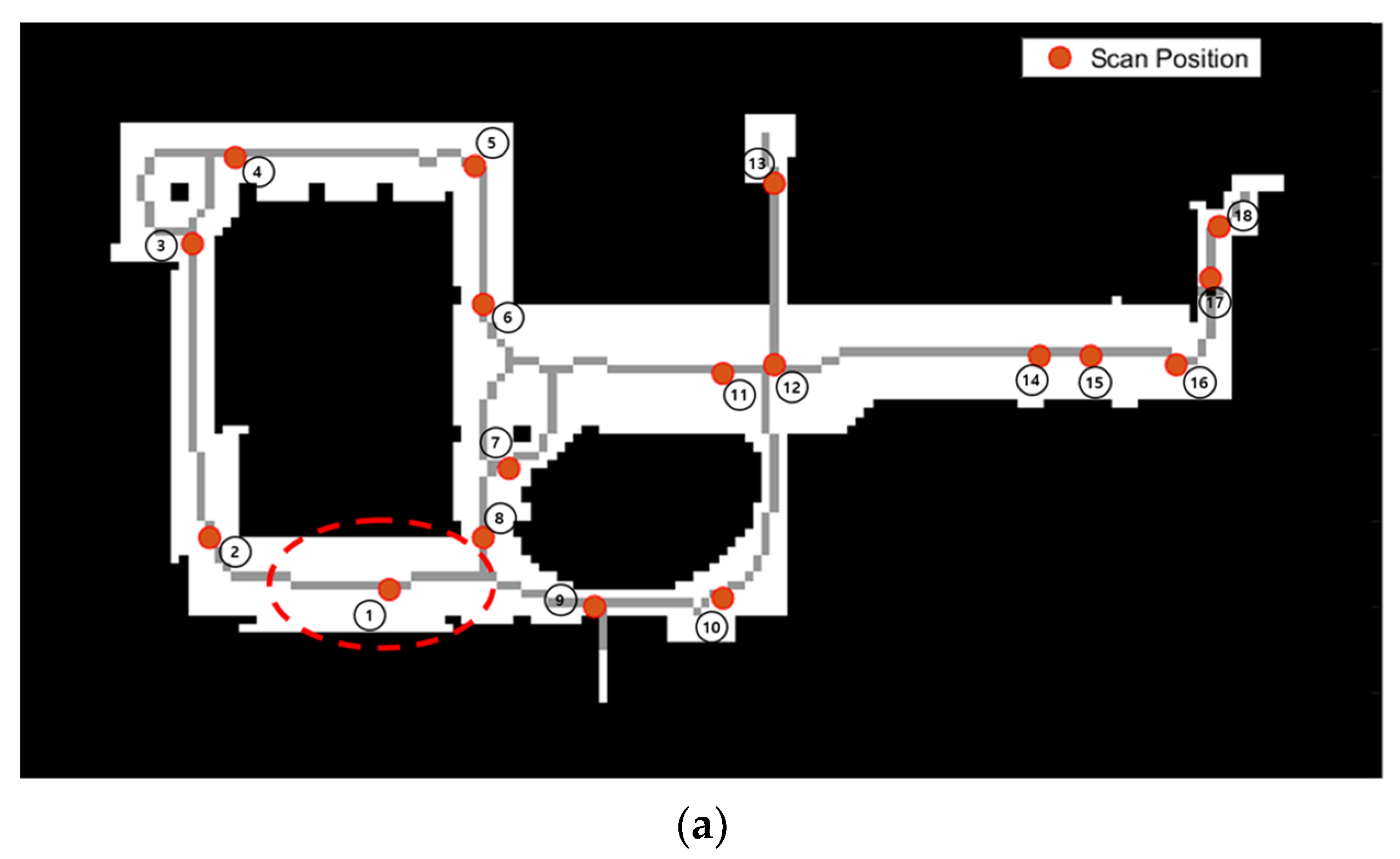
3.1. Test Site
3.2. Data Collection with a Stop-and-Go Scanning System
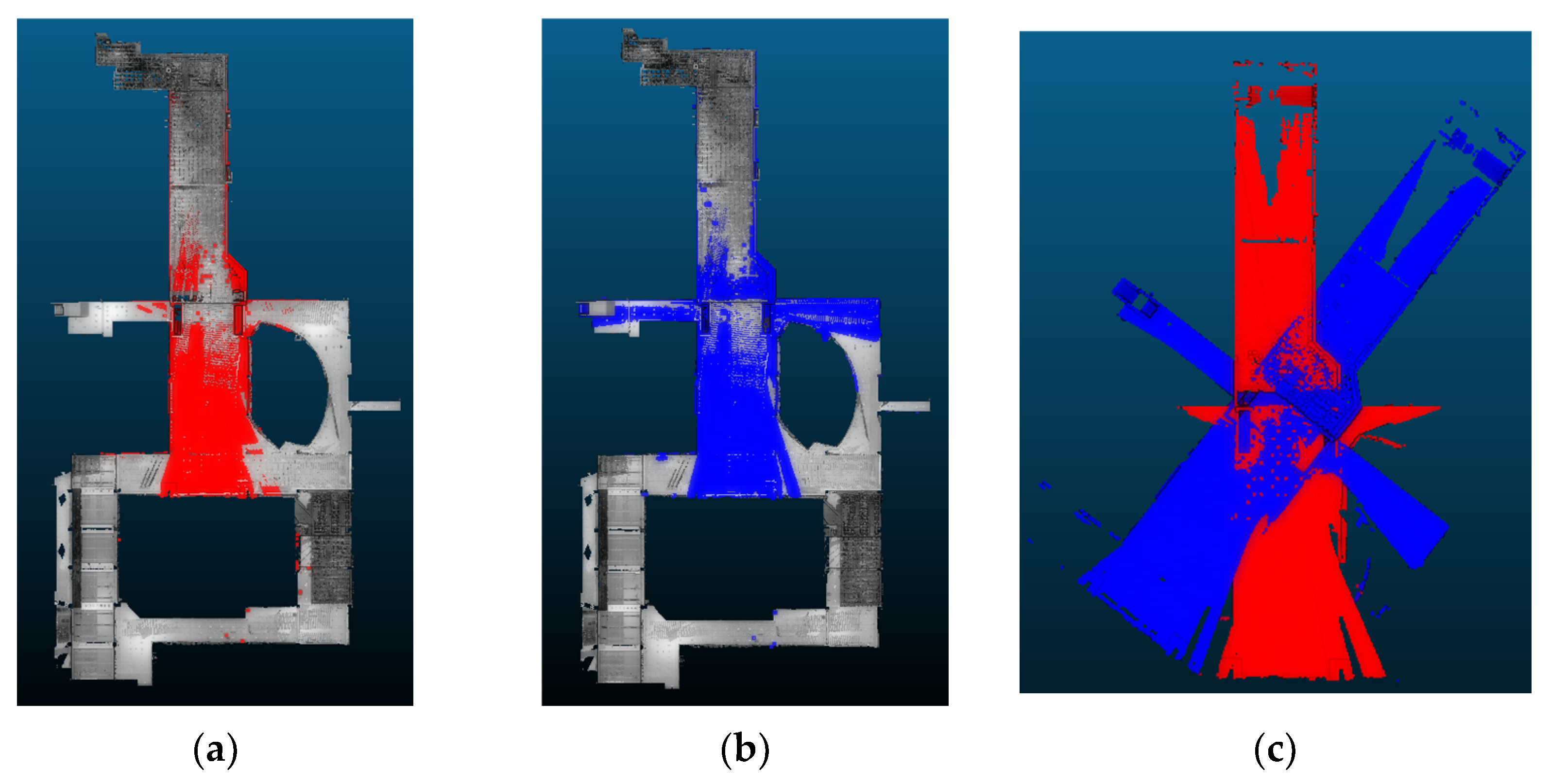
3.3. Registration Results
3.4. Comparison of Registration Results with Other Approaches
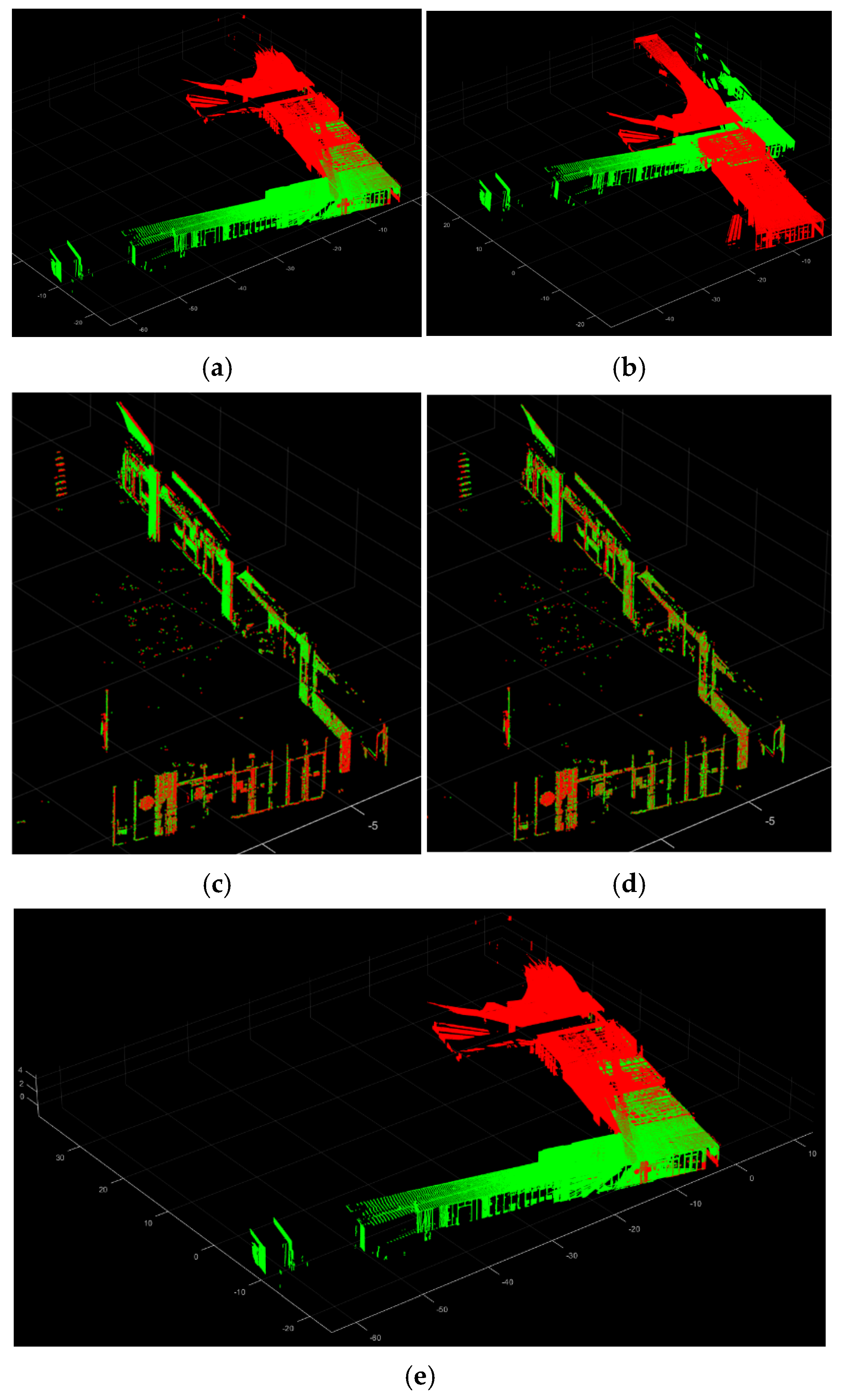
3.5. Comparison of Registration Results on the Benchmark Datasets
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Laczkowski, K.; Asutosh, P.; Rajagopal, N.; Sandrone, P. How OEMs Can Seize the High-Tech Future in Agriculture and Construction. Available online: https://www.mckinsey.com/~/media/McKinsey/Industries/Automotive%20and%20Assembly/Our%20Insights/How%20OEMs%20can%20seize%20the%20high%20tech%20future%20in%20agriculture%20and%20construction/How-OEMs-can-seize-the-high-tech-future-in-agriculture-and-construction.pdf (accessed on 6 November 2023).
- Mill, T.; Alt, A.; Liias, R. Combined 3D building surveying techniques-terrestrial laser scanning (TLS) and total station surveying for BIM data management purposes. J. Civ. Eng. Manag. 2013, 19, 23–32. [Google Scholar] [CrossRef]
- Tamke, M.; Zwierzycki, M.; Evers, H.L.; Ochmann, S.; Vock, R.; Wessel, R. Tracking changes in buildings over time-Fully automated reconstruction and difference detection of 3D scan and BIM files. In Proceedings of the 34th Education & Research in Computer Aided Architectural Design in Europe Conference, Oulu, Finland, 22–26 August 2016; pp. 643–651. [Google Scholar]
- Yang, H.; Omidalizarandi, M.; Xu, X.; Neumann, I. Terrestrial laser scanning technology for deformation monitoring and surface modeling of arch structures. Compos. Struct. 2017, 169, 173–179. [Google Scholar] [CrossRef]
- Soilán, M.; Sánchez-Rodríguez, A.; del Río-Barral, P.; Perez-Collazo, C.; Arias, P.; Riveiro, B. Review of laser scanning technologies and their applications for road and railway infrastructure monitoring. Infrastructures 2019, 4, 58. [Google Scholar] [CrossRef]
- Jung, J.; Yoon, S.; Ju, S.; Heo, J. Development of Kinematic 3D Laser Scanning System for Indoor Mapping and As-Built BIM Using Constrained SLAM. Sensors 2015, 15, 26430–26456. [Google Scholar] [CrossRef] [PubMed]
- Jung, J.; Hong, S.; Yoon, S.; Kim, J.; Heo, J. Automated 3D Wireframe Modeling of Indoor Structures from Point Clouds Using Constrained Least-Squares Adjustment for As-Built BIM. J. Comput. Civ. Eng. 2016, 30, 04015074. [Google Scholar] [CrossRef]
- Jung, J.; Stachniss, C.; Ju, S.; Heo, J. Automated 3D volumetric reconstruction of multiple-room building interiors for as-built BIM. Adv. Eng. Inform. 2018, 38, 811–825. [Google Scholar] [CrossRef]
- Han, S.; Cho, H.; Kim, S.; Jung, J.; Heo, J. Automated and efficient method for extraction of tunnel cross sections using terrestrial laser scanned data. J. Comput. Civ. Eng. 2013, 27, 274–281. [Google Scholar] [CrossRef]
- Park, S.; Ju, S.; Yoon, S.; Nguyen, M.H.; Heo, J. An efficient data structure approach for BIM-to-point-cloud change detection using modifiable nested octree. Automat. Constr. 2021, 132, 103922. [Google Scholar] [CrossRef]
- Zhang, C.; Arditi, D. Advanced Progress Control of Infrastructure Construction Projects Using Terrestrial Laser Scanning Technology. Infrastructures 2020, 5, 83. [Google Scholar] [CrossRef]
- Bassier, M.; Vincke, S.; De Winter, H.; Vergauwen, M. Drift Invariant Metric Quality Control of Construction Sites Using BIM and Point Cloud Data. ISPRS Int. J. Geoinf. 2020, 9, 545. [Google Scholar] [CrossRef]
- Ahn, J.; Wohn, K. Interactive scan planning for heritage recording. Multimed. Tools. Appl. 2016, 75, 3655–3675. [Google Scholar] [CrossRef]
- Baik, A. From point cloud to jeddah heritage BIM nasif historical house—Case study. Digit. Appl. Archaeol. Cult. Herit. 2017, 4, 1–18. [Google Scholar] [CrossRef]
- Nguyen, M.H.; Yoon, S.; Ju, S.; Park, S.; Heo, J. B-EagleV: Visualization of Big Point Cloud Datasets in Civil Engineering Using a Distributed Computing Solution. J. Comput. Civ. Eng. 2022, 36, 04022005. [Google Scholar] [CrossRef]
- Park, S.; Yoon, S.; Ju, S.; Heo, J. BIM-based scan planning for scanning with a quadruped walking robot. Automat. Constr. 2023, 152, 104911. [Google Scholar] [CrossRef]
- Qi, Y.; Coops, N.C.; Daniels, L.D.; Butson, C.R. Comparing tree attributes derived from quantitative structure models based on drone and mobile laser scanning point clouds across varying canopy cover conditions. ISPRS J. Photogramm. Remote Sens. 2022, 192, 49–65. [Google Scholar] [CrossRef]
- Warchoł, A.; Karaś, T.; Antoń, M. Selected Qualitative Aspects of Lidar Point Clouds: Geoslam Zeb-Revo and Faro Focus 3D X130. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2023, 205–212. [Google Scholar] [CrossRef]
- Kim, P.; Park, J.; Cho, Y. As-is Geometric Data Collection and 3D Visualization through the Collaboration between UAV and UGV. In Proceedings of the International Symposium on Automation and Robotics in Construction (ISARC), Banff, AB, Canada, 21–24 May 2019; pp. 544–551. [Google Scholar]
- Blaer, P.S.; Allen, P.K. Data acquisition and view planning for 3-D modeling tasks. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego, CA, USA, 29 October–2 November 2007; pp. 417–422. [Google Scholar]
- Chow, J.C.K.; Lichti, D.D.; Hol, J.D.; Bellusci, G.; Luinge, H. Imu and multiple RGB-D camera fusion for assisting indoor stop-and-go 3D terrestrial laser scanning. Robotics 2014, 3, 247–280. [Google Scholar] [CrossRef]
- Tuttas, S.; Braun, A.; Borrmann, A.; Stilla, U. Comparision of Photogrammetric Point Clouds with BIM Building elements for Construction Progress Monitoring. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Zurich, Switzerland, 5–7 September 2014; p. 341. [Google Scholar]
- Prieto, S.; Quintana, B.; Adán, A.; Vázquez, A.S. As-is building-structure reconstruction from a probabilistic next best scan approach. Rob. Auton. Syst. 2017, 94, 186–207. [Google Scholar] [CrossRef]
- Frías, E.; Díaz-Vilariño, L.; Balado, J.; Lorenzo, H. From BIM to Scan Planning and Optimization for Construction Control. Remote Sens. 2019, 11, 1963. [Google Scholar] [CrossRef]
- Cheng, L.; Chen, S.; Liu, X.; Xu, H.; Wu, Y.; Li, M.; Chen, Y. Registration of Laser Scanning Point Clouds: A Review. Sensors 2018, 18, 1641. [Google Scholar] [CrossRef]
- Dong, Z.; Liang, F.; Yang, B.; Xu, Y.; Zang, Y.; Li, J.; Wang, Y.; Dai, W.; Fan, H.; Hyyppä, J. Registration of large-scale terrestrial laser scanner point clouds: A review and benchmark. ISPRS J. Photogramm. Remote Sens. 2020, 163, 327–342. [Google Scholar] [CrossRef]
- Cai, Z.; Chin, T.-J.; Bustos, A.P.; Schindler, K. Practical optimal registration of terrestrial LiDAR scan pairs. ISPRS J. Photogramm. Remote Sens. 2019, 147, 118–131. [Google Scholar] [CrossRef]
- Wu, H.; Yan, L.; Xie, H.; Wei, P.; Dai, J. A hierarchical multiview registration framework of TLS point clouds based on loop constraint. ISPRS J. Photogramm. Remote Sens. 2023, 195, 65–76. [Google Scholar] [CrossRef]
- Knopp, J.; Prasad, M.; Willems, G.; Timofte, R.; Van Gool, L. Hough Transform and 3D SURF for Robust Three Dimensional Classification. In Proceedings of the 11th European Conference on Computer Vision, Heraklion, Crete, Greece, 5–11 September 2010; pp. 589–602. [Google Scholar]
- Sipiran, I.; Bustos, B. Harris 3D: A robust extension of the Harris operator for interest point detection on 3D meshes. Vis. Comput. 2011, 27, 963–976. [Google Scholar] [CrossRef]
- Zheng, L.; Yu, M.; Song, M.; Stefanidis, A.; Ji, Z.; Yang, C. Registration of Long-Strip Terrestrial Laser Scanning Point Clouds Using RANSAC and Closed Constraint Adjustment. Remote Sens. 2016, 8, 278. [Google Scholar] [CrossRef]
- Ge, X. Automatic markerless registration of point clouds with semantic-keypoint-based 4-points congruent sets. ISPRS J. Photogramm. Remote Sens. 2017, 130, 344–357. [Google Scholar] [CrossRef]
- Guo, Y.; Sohel, F.; Bennamoun, M.; Wan, J.; Lu, M. An Accurate and Robust Range Image Registration Algorithm for 3D Object Modeling. IEEE Trans. Multimed. 2014, 16, 1377–1390. [Google Scholar] [CrossRef]
- Cheng, L.; Wu, Y.; Tong, L.; Chen, Y.; Li, M. Hierarchical Registration Method for Airborne and Vehicle LiDAR Point Cloud. Remote Sens. 2015, 7, 13921–13944. [Google Scholar] [CrossRef]
- Al-Durgham, K.; Habib, A. Association-Matrix-Based Sample Consensus Approach for Automated Registration of Terrestrial Laser Scans Using Linear Features. Photogramm. Eng. Remote Sens. 2014, 80, 1029–1039. [Google Scholar] [CrossRef]
- Prokop, M.; Shaikh, S.A.; Kim, K.-S. Low Overlapping Point Cloud Registration Using Line Features Detection. Remote Sens. 2020, 12, 61. [Google Scholar] [CrossRef]
- Wu, H.; Scaioni, M.; Li, H.; Li, N.; Lu, M.; Liu, C. Feature-constrained registration of building point clouds acquired by terrestrial and airborne laser scanners. J. Appl. Remote. Sens. 2014, 8, 083587. [Google Scholar] [CrossRef]
- Kim, C.; Habib, A.; Pyeon, M.; Kwon, G.-r.; Jung, J.; Heo, J. Segmentation of Planar Surfaces from Laser Scanning Data Using the Magnitude of Normal Position Vector for Adaptive Neighborhoods. Sensors 2016, 16, 140. [Google Scholar] [CrossRef] [PubMed]
- Kim, P.; Chen, J.; Cho, Y.K. Automated Point Cloud Registration Using Visual and Planar Features for Construction Environments. J. Comput. Civ. Eng. 2018, 32, 04017076. [Google Scholar] [CrossRef]
- Theiler, P.W.; Schindler, K. Automatic Registration of Terrestrial Laser Scanner Point Clouds Using Natural Planar Surfaces. In Proceedings of the ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia, 25 August–1 September 2012; pp. 173–178. [Google Scholar]
- Xu, Y.; Boerner, R.; Yao, W.; Hoegner, L.; Stilla, U. Pairwise coarse registration of point clouds in urban scenes using voxel-based 4-planes congruent sets. ISPRS J. Photogramm. Remote Sens. 2019, 151, 106–123. [Google Scholar] [CrossRef]
- Favre, K.; Pressigout, M.; Marchand, E.; Morin, L. A Plane-based Approach for Indoor Point Clouds Registration. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 7072–7079. [Google Scholar]
- Wei, P.; Yan, L.; Xie, H.; Huang, M. Automatic coarse registration of point clouds using plane contour shape descriptor and topological graph voting. Automat. Constr. 2022, 134, 104055. [Google Scholar] [CrossRef]
- Chen, S.; Nan, L.; Xia, R.; Zhao, J.; Wonka, P. PLADE: A Plane-Based Descriptor for Point Cloud Registration With Small Overlap. IEEE Trans. Geosci. Remote Sens. 2020, 58, 2530–2540. [Google Scholar] [CrossRef]
- Zou, Z.; Lang, H.; Lou, Y.; Lu, J. Plane-based global registration for pavement 3D reconstruction using hybrid solid-state LiDAR point cloud. Automat. Constr. 2023, 152, 104907. [Google Scholar] [CrossRef]
- Zeng, A.; Song, S.; Niessner, M.; Fisher, M.; Xiao, J.; Funkhouser, T. 3DMatch: Learning Local Geometric Descriptors from RGB-D Reconstructions. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 199–208. [Google Scholar]
- Ao, S.; Hu, Q.; Yang, B.; Markham, A.; Guo, Y. Spinnet: Learning a general surface descriptor for 3d point cloud registration. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Online, 19–25 June 2021; pp. 11753–11762. [Google Scholar]
- Li, C.; Xia, Y.; Yang, M.; Wu, X. Study on TLS Point Cloud Registration Algorithm for Large-Scale Outdoor Weak Geometric Features. Sensors 2022, 22, 5072. [Google Scholar] [CrossRef]
- Ma, J.W.; Czerniawski, T.; Leite, F. Semantic segmentation of point clouds of building interiors with deep learning: Augmenting training datasets with synthetic BIM-based point clouds. Automat. Constr. 2020, 113, 103144. [Google Scholar] [CrossRef]
- Besl, P.; McKay, N. Method for registration of 3-D shapes. In Proceedings of the Robotics ‘91, Boston, MA, USA; 1992. [Google Scholar]
- Grant, D.; Bethel, J.; Crawford, M. Point-to-plane registration of terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2012, 72, 16–26. [Google Scholar] [CrossRef]
- Segal, A.; Haehnel, D.; Thrun, S. Generalized-icp. In Proceedings of the Robotics: Science and systems, Seattle, WA, USA, 28 June–1 July 2009; p. 435. [Google Scholar]
- Zhang, J.; Yao, Y.; Deng, B. Fast and Robust Iterative Closest Point. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 3450–3466. [Google Scholar] [CrossRef] [PubMed]
- Biber, P.; Strasser, W. The normal distributions transform: A new approach to laser scan matching. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003), Las Vegas, NV, USA, 27–31 October 2003; Volume 2743, pp. 2743–2748. [Google Scholar]
- Takeuchi, E.; Tsubouchi, T. A 3-D Scan Matching using Improved 3-D Normal Distributions Transform for Mobile Robotic Mapping. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3068–3073. [Google Scholar]
- Das, A.; Waslander, S.L. Scan registration with multi-scale k-means normal distributions transform. In Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems, Vilamoura-Algarve, Portugal, 7–12 October 2012; pp. 2705–2710. [Google Scholar]
- Magnusson, M.; Lilienthal, A.; Duckett, T. Scan registration for autonomous mining vehicles using 3D-NDT. J. Field Robot. 2007, 24, 803–827. [Google Scholar] [CrossRef]
- Kurazume, R.; Oshima, S.; Nagakura, S.; Jeong, Y.; Iwashita, Y. Automatic large-scale three dimensional modeling using cooperative multiple robots. Comput. Vis. Image Underst. 2017, 157, 25–42. [Google Scholar] [CrossRef]
- Liu, M.; Sun, X.; Wang, Y.; Shao, Y.; You, Y. Deformation Measurement of Highway Bridge Head Based on Mobile TLS Data. IEEE Access 2020, 8, 85605–85615. [Google Scholar] [CrossRef]
- Zhong, L.; Liu, P.; Wang, L.; Wei, Z.; Guan, H.; Yu, Y. A Combination of Stop-and-Go and Electro-Tricycle Laser Scanning Systems for Rural Cadastral Surveys. ISPRS Int. J. Geoinf. 2016, 5, 160. [Google Scholar] [CrossRef]
- Ge, X.; Hu, H.; Wu, B. Image-Guided Registration of Unordered Terrestrial Laser Scanning Point Clouds for Urban Scenes. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9264–9276. [Google Scholar] [CrossRef]
- Pavan, N.L.; dos Santos, D.R.; Khoshelham, K. Global Registration of Terrestrial Laser Scanner Point Clouds Using Plane-to-Plane Correspondences. Remote Sens. 2020, 12, 1127. [Google Scholar] [CrossRef]
- Lin, Y.; Hyyppä, J.; Kukko, A. Stop-and-Go Mode: Sensor Manipulation as Essential as Sensor Development in Terrestrial Laser Scanning. Sensors 2013, 13, 8140–8154. [Google Scholar] [CrossRef]
- Mohammed, H.; Alsubaie, N.M.; Elhabiby, M.; El-sheimy, N. Registration of time of flight terrestrial laser scanner data for stop-and-go mode. In Proceedings of the International Archives of the Photogramm. Remote Sensing and Spatial Information Sciences, Denver, CO, USA, 17–20 November 2014; pp. 287–291. [Google Scholar]
- Knechtel, J.; Klingbeil, L.; Haunert, J.H.; Dehbi, Y. Optimal Position and Path Planning for Stop-And-Go Laserscanning for the Acquisition of 3d Building Models. In Proceedings of the ISPRS Annals of the Photogramm. Remote Sensing and Spatial Information Sciences, Nice, France, 6–11 June 2022; pp. 129–136. [Google Scholar]
- Foryś, P.; Sitnik, R.; Markiewicz, J.; Bunsch, E. Fast adaptive multimodal feature registration (FAMFR): An effective high-resolution point clouds registration workflow for cultural heritage interiors. Herit. Sci. 2023, 11, 190. [Google Scholar] [CrossRef]
- Borrmann, D.; Nüchter, A.; Ðakulović, M.; Maurović, I.; Petrović, I.; Osmanković, D.; Velagić, J. A mobile robot based system for fully automated thermal 3D mapping. Adv. Eng. Inform. 2014, 28, 425–440. [Google Scholar] [CrossRef]
- Brenner, C.; Dold, C.; Ripperda, N. Coarse orientation of terrestrial laser scans in urban environments. ISPRS J. Photogramm. Remote Sens. 2008, 63, 4–18. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Globally consistent registration of terrestrial laser scans via graph optimization. ISPRS J. Photogramm. Remote Sens. 2015, 109, 126–138. [Google Scholar] [CrossRef]
- Korea Construction Standards Center. Available online: https://www.kcsc.re.kr/Search/ListCodes/5010# (accessed on 6 November 2023).
- Torr, P.H.S.; Zisserman, A. MLESAC: A New Robust Estimator with Application to Estimating Image Geometry. Comput. Vis. Image Underst. 2000, 78, 138–156. [Google Scholar] [CrossRef]
- Fischler, M.A.; Bolles, R.C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography. Commun. ACM 1981, 24, 381–395. [Google Scholar] [CrossRef]
- Hoppe, H.; DeRose, T.; Duchamp, T.; McDonald, J.; Stuetzle, W. Surface reconstruction from unorganized points. In Proceedings of the 19th Annual Conference on Computer Graphics and Interactive Techniques, Chicago, IL, USA, 1 July 1992; pp. 71–78. [Google Scholar]
- Nguyen, M.H.; Yoon, S.; Park, S.; Heo, J. A demonstration of B-EagleV Visualizing massive point cloud directly from HDFS. In Proceedings of the 2019 IEEE International Conference on Big Data, Los Angeles, CA, USA, 9–12 December 2019; pp. 4121–4124. [Google Scholar]
- Schütz, M. Potree: Rendering Large Point Clouds in Web Browsers. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2016. [Google Scholar]
- Yoon, S.; Ju, S.; Park, S.; Heo, J. A Framework Development for Mapping and Detecting Changes in Repeatedly Collected Massive Point Clouds. In Proceedings of the International Symposium on Automation and Robotics in Construction, Banff, AB, Canada, 21–24 May 2019; pp. 603–609. [Google Scholar]
- Low, K.-L. Linear Least-Squares Optimization for Point-to-Plane Icp Surface Registration. Available online: https://citeseerx.ist.psu.edu/document?repid=rep1&type=pdf&doi=17d770dc285254508840cdffadf797b516f60f89 (accessed on 6 November 2023).
- Rusinkiewicz, S. A symmetric objective function for ICP. ACM Trans. Graph. 2019, 4, 85. [Google Scholar] [CrossRef]
- Salvi, J.; Matabosch, C.; Fofi, D.; Forest, J. A review of recent range image registration methods with accuracy evaluation. Image Vis. Comput. 2007, 25, 578–596. [Google Scholar] [CrossRef]
- Ghilani, C.D. Adjustment Computations: Spatial Data Analysis; John Wiley & Sons: Hoboken, NJ, USA, 2017. [Google Scholar]
- Boston Dynamics Inc. Available online: https://www.bostondynamics.com/products/spot (accessed on 6 November 2023).
- Velodyne Lidar Inc. Available online: https://velodynelidar.com/products/puck/ (accessed on 6 November 2023).
- FARO Inc. Available online: https://www.faro.com/en/Products/Hardware/Focus-Laser-Scanners (accessed on 6 November 2023).
- Bouman, A.; Ginting, M.F.; Alatur, N.; Palieri, M.; Fan, D.D.; Touma, T.; Pailevanian, T.; Kim, S.-K.; Otsu, K.; Burdick, J. Autonomous spot: Long-range autonomous exploration of extreme environments with legged locomotion. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 25–29 October 2020; pp. 2518–2525. [Google Scholar]
- Wang, C. Practical semiautomatic global registration of multiple point clouds based on semidefinite programming. J. Electron. Imaging 2022, 31, 063009. [Google Scholar] [CrossRef]
- Lei, H.; Jiang, G.; Quan, L. Fast Descriptors and Correspondence Propagation for Robust Global Point Cloud Registration. IEEE Trans. Image Process. 2017, 26, 3614–3623. [Google Scholar] [CrossRef]
- Yin, P.; Wang, D.; Du, S.; Ying, S.; Gao, Y.; Zheng, N. CoBigICP: Robust and Precise Point Set Registration using Correntropy Metrics and Bidirectional Correspondence. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NB, USA, 25–29 October 2020; pp. 4692–4699. [Google Scholar]
- Tao, W.; Hua, X.; Chen, Z.; Tian, P. Fast and Automatic Registration of Terrestrial Point Clouds Using 2D Line Features. Remote Sens. 2020, 12, 1283. [Google Scholar] [CrossRef]
- Liu, W.; Wu, H.; Chirikjian, G.S. LSG-CPD: Coherent point drift with local surface geometry for point cloud registration. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Online, 11–17 October 2021; pp. 15293–15302. [Google Scholar]
- Wang, Z.; Yan, S.; Wu, L.; Zhang, X.; Chen, B. Robust point clouds registration with point-to-point lp distance constraints in large-scale metrology. ISPRS J. Photogramm. Remote Sens. 2022, 189, 23–35. [Google Scholar] [CrossRef]
- Jung, J.; Hong, S.; Jeong, S.; Kim, S.; Cho, H.; Hong, S.; Heo, J. Productive modeling for development of as-built BIM of existing indoor structures. Automat. Constr. 2014, 42, 68–77. [Google Scholar] [CrossRef]
- Xia, R.; Jiang, K.; Wang, X.; Zhan, Z. Structural Line Feature Selection for Improving Indoor Visual Slam. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. 2022, XLIII-B4-2022, 327–334. [Google Scholar] [CrossRef]
- Gao, R.; Xiao, X.; Xing, W.; Li, C.; Liu, L. Unsupervised Learning of Monocular Depth and Ego-Motion in Outdoor/Indoor Environments. IEEE Internet Things J. 2022, 9, 16247–16258. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Acquisition | Prior Information | Registration | ||||
|---|---|---|---|---|---|---|
| Platform | Overlap | Autonomous | Data | Approach | Evaluation | |
| Blaer and Allen 2007 [20] | UGV | - | O | - | Target-and-manual-based | X |
| Kurazume et al. 2017 [58] | Multi-UGVs | - | O | Localization data | Target-and-manual-based | X |
| Liu et al. 2020 [59] | Vehicle | - | X | - | Manual | X |
| Park et al. 2023 [16] | Quadruped robot | - | O | - | Manual | X |
| Lin et al. 2013 [63] | MMS | - | - | IMU, GPS | ICP | X |
| Mohammed et al. 2014 [64] | - | High (>50%) | - | RGB image | SURF, ICP | O |
| Ge et al. 2019 [61] | - | High (>50%) | - | Panorama image | Visual SLAM | O |
| Knechtel et al. 2022 [65] | - | High (>50%) | - | Scan planning | ICP | X |
| Chow et al. 2014 [21] | Handcart | High (>50%) | X | IMU, RGB-D | SLAM, ICP | X |
| Borrmann et al. 2014 [67] | UGV | High (>50%) | O | Odometry | SLAM | X |
| Zhong et al. 2016 [60] | Vehicle | High (>50%) | X | IMU, GNSS | System Calibration | X |
| Prieto et al. 2017 [23] | UGV | High (>50%) | O | Localization data | ICP | X |
| Proposed method | Quadruped robot | Low (<30%) | O | Localization data | Plane-based, ICP | O |
| Parameter | Value |
|---|---|
| Scanner height | 1 m |
| Lase range | 20 m |
| Vertical field of view | −150°–+150° |
| Horizontal field of view | −180°–+180° |
| Description | Value |
|---|---|
| # of Scans | 18 |
| # of Points | 186 million |
| Computation Time (s) | 424.2 |
| Max Overlapping Ratio (%) | 53.09 |
| Min Overlapping Ratio (%) | 13.09 |
| Average Overlapping Ratio (%) | 29.89 |
| SSR (%) | 100 |
| Positional Accuracy (RMSE, m) | 0.044 |
| Method | SRR (%) | Positional Accuracy (m) | Time (s) |
|---|---|---|---|
| MPCGR [85] | 0 | - | - |
| HL-MRF [28] | 0 | - | - |
| Proposed | 100 | 0.044 | 424.2 |
| Method | SRR(O/X) | Positional Accuracy (m) | Time (s) |
|---|---|---|---|
| Fast-descriptors-based [86] | X | 0.137 | 561.53 |
| CoBigICP [87] | X | 7.556 | 1257.91 |
| 2D-line feature-based [88] | O | 0.061 | 826.36 |
| LSG-CPD [89] | O | 0.079 | 982.03 |
| WES-ICP [90] | X | 5.764 | 1572.15 |
| Proposed | O | 0.030 | 53.95 |
| Method | SRR(O/X) | Positional Accuracy (m) | Time (s) |
|---|---|---|---|
| 2D-line feature-based [88] | X | 16.453 | 820.50 |
| LSG-CPD [89] | X | 17.817 | 283.33 |
| Proposed | O | 0.029 | 29.60 |
| Dataset | Method | SRR(O/X) | Rotation Error (degree) | Translation Error (m) | Time (s) |
|---|---|---|---|---|---|
| ETH–Office [69] | MPCGR [85] | X | - | - | - |
| HL-MRF [28] | O | 0.648 | 0.041 | 233.28 | |
| Proposed | O | 0.102 | 0.038 | 33.21 | |
| RESSO—(e) [44] | MPCGR [85] | X | - | - | - |
| HL-MRF [28] | X | - | - | - | |
| Proposed | O | 0.729 | 0.065 | 60.13 | |
| RESSO—(i) [44] | MPCGR [85] | X | - | - | - |
| HL-MRF [28] | O | 1.316 | 0.075 | 923.19 | |
| Proposed | O | 0.761 | 0.048 | 38.84 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Ju, S.; Nguyen, M.H.; Yoon, S.; Heo, J. Automated Point Cloud Registration Approach Optimized for a Stop-and-Go Scanning System. Sensors 2024, 24, 138. https://doi.org/10.3390/s24010138
Park S, Ju S, Nguyen MH, Yoon S, Heo J. Automated Point Cloud Registration Approach Optimized for a Stop-and-Go Scanning System. Sensors. 2024; 24(1):138. https://doi.org/10.3390/s24010138
Chicago/Turabian StylePark, Sangyoon, Sungha Ju, Minh Hieu Nguyen, Sanghyun Yoon, and Joon Heo. 2024. "Automated Point Cloud Registration Approach Optimized for a Stop-and-Go Scanning System" Sensors 24, no. 1: 138. https://doi.org/10.3390/s24010138
APA StylePark, S., Ju, S., Nguyen, M. H., Yoon, S., & Heo, J. (2024). Automated Point Cloud Registration Approach Optimized for a Stop-and-Go Scanning System. Sensors, 24(1), 138. https://doi.org/10.3390/s24010138