
Research on UAV Swarm Network Modeling and Resilience Assessment Methods

Abstract
:1. Introduction
1.1. Background of the Study
1.2. Related Works
1.3. Contributions
- We take into consideration the distinct characteristics of the self-organizing network communication layer and structural layer within UAV swarms, along with the dynamic reconstruction and information correlation properties. It proposes a double layer coupled model for UAV swarms based on complex networks;
- The comprehensive resilience measurement for UAV swarms introduced in this study incorporates three network topology indicators. These indicators, when combined, offer a thorough and objective assessment of the overall network structure, local clustering, and information transmission efficiency. This approach achieves multidimensional extraction of comprehensive metrics;
- This study introduces two distinct resilience assessment methods. The resilience assessment, considering the dynamic reconstruction of UAV swarms, analyzes differences in resilience among three network structures under different strategy combinations. The resilience assessment, considering information correlation, provides resilience curves for three network structures and analyzes the impact of different recovery rates on network resilience.
2. Modeling of Self-Organizing Networks of UAV Swarm
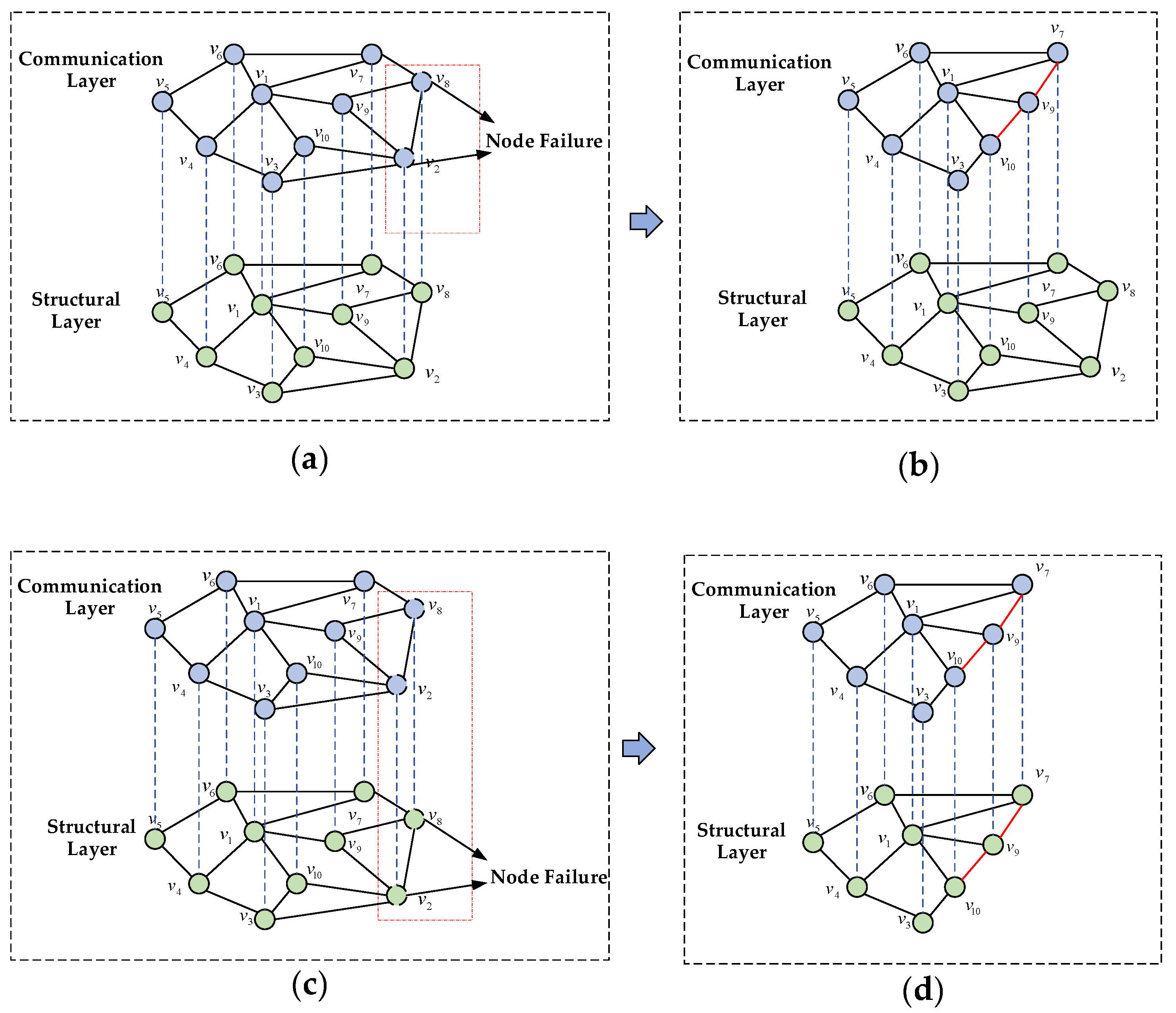
2.1. Complex Network Based Double Layer Coupled UAV Swarm Modeling
2.2. UAV Evolution Analysis and Modeling
2.2.1. Dynamic Reconfiguration Analysis and Modeling
2.2.2. Information Correlation Analysis and Modeling
- (1)
- Susceptible state node S: the node is not infected but lacks immunity and is susceptible to infection when exposed to an infected state node;
- (2)
- Infected state node I: the node has been infected by the virus, i.e., it fails and spreads the virus to neighboring nodes;
- (3)
- Recovery status node Re: The node has resumed its operational status. This status node will not be infected with a virus or have an impact on other nodes;
- (4)
- Infection rate β: the probability of susceptible node S being infected after contact with infected node I;
- (5)
- Recovery rate γ: the probability of an infected node I entering recovery state Re.
- Step 1:
- when t = 0 is set, randomize m infected nodes;
- Step 2:
- determine whether the population reaches the infection rate β, i.e., m/n > β. If it is not reached, randomly select a node from the neighboring nodes of the infected node to enter the infected state. Otherwise, go to Step 3;
- Step 3:
- Determine whether the recovery rate of the infected node reaches γ. If yes, the node is converted to a recovery state, and the algorithm ends. Otherwise, go to Step 4;
- Step 4:
- make t = t + 1 and repeat Steps 2 and 3 until there are no remaining nodes in the communication layer.
3. Methods for Assessing the Resilience of UAV Swarm Systems
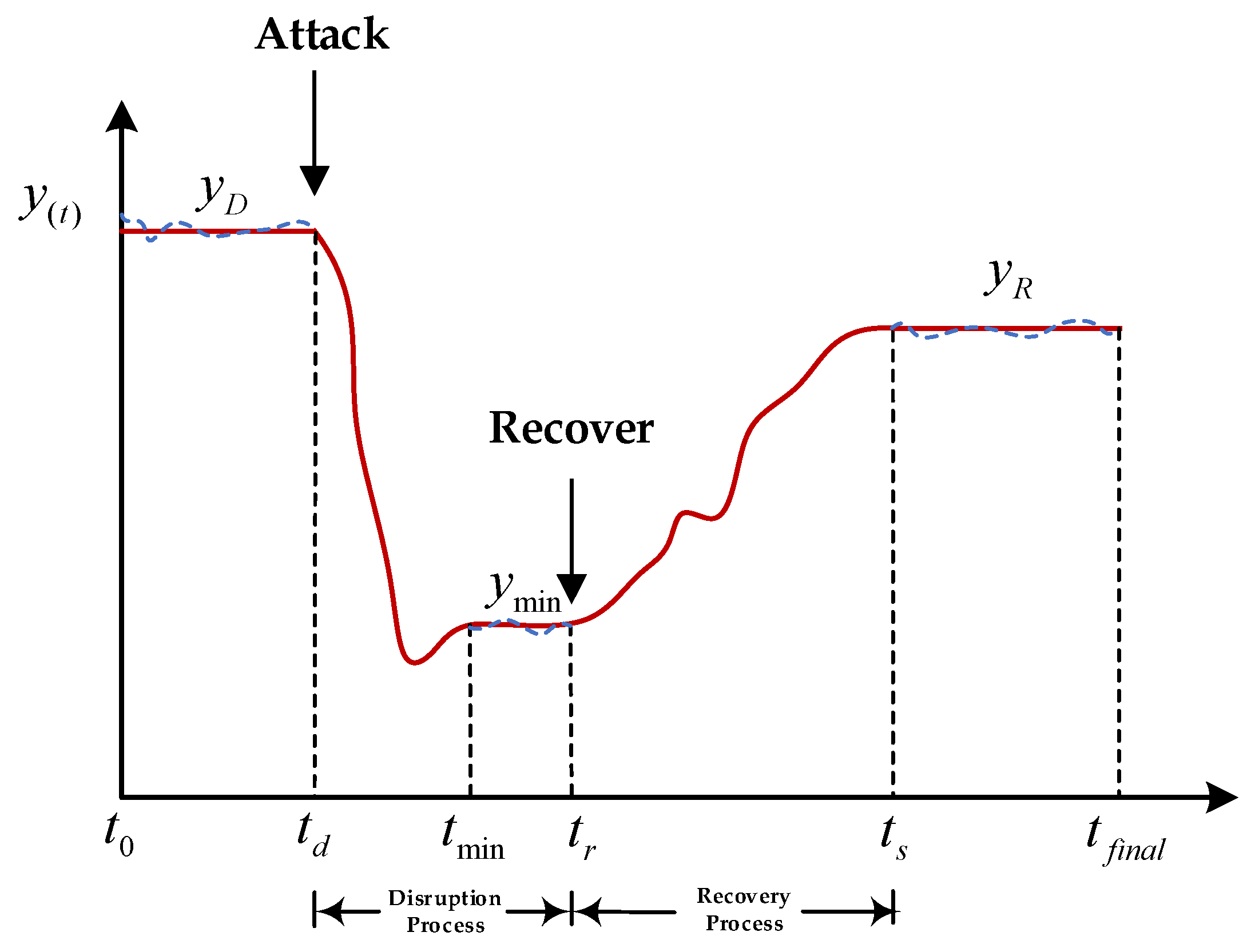
3.1. The Concept of UAV Swarm Resilience
3.2. Extraction and Analysis of Resilience Indicators
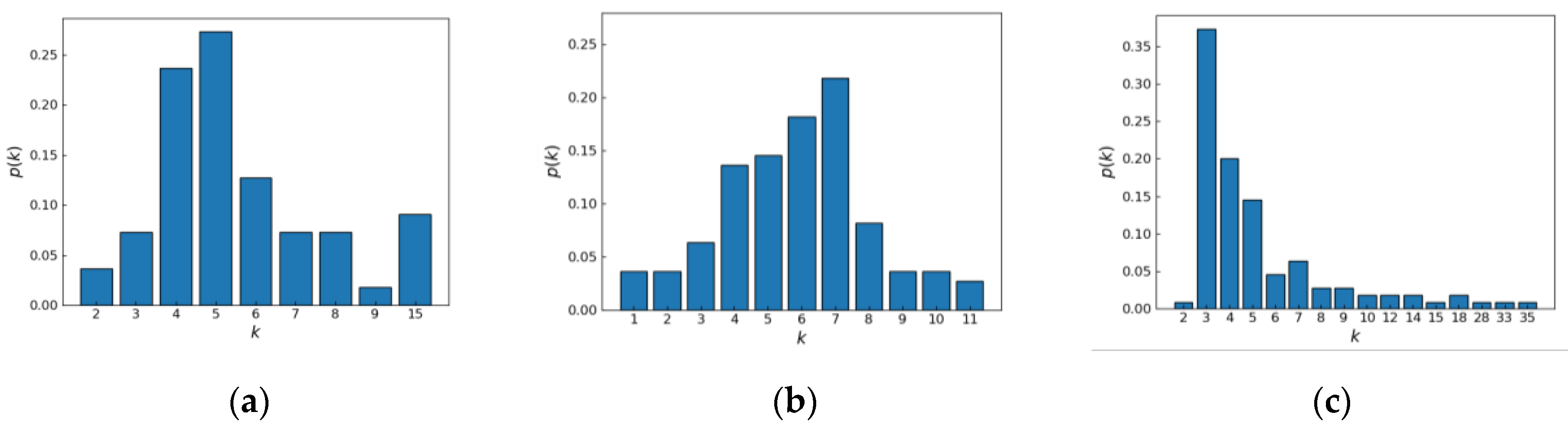
3.2.1. Node Degree and Degree Distribution
3.2.2. Clustering Factor
3.2.3. Average Path Length
3.2.4. Network Efficiency
3.2.5. Comprehensive Evaluation Indicators
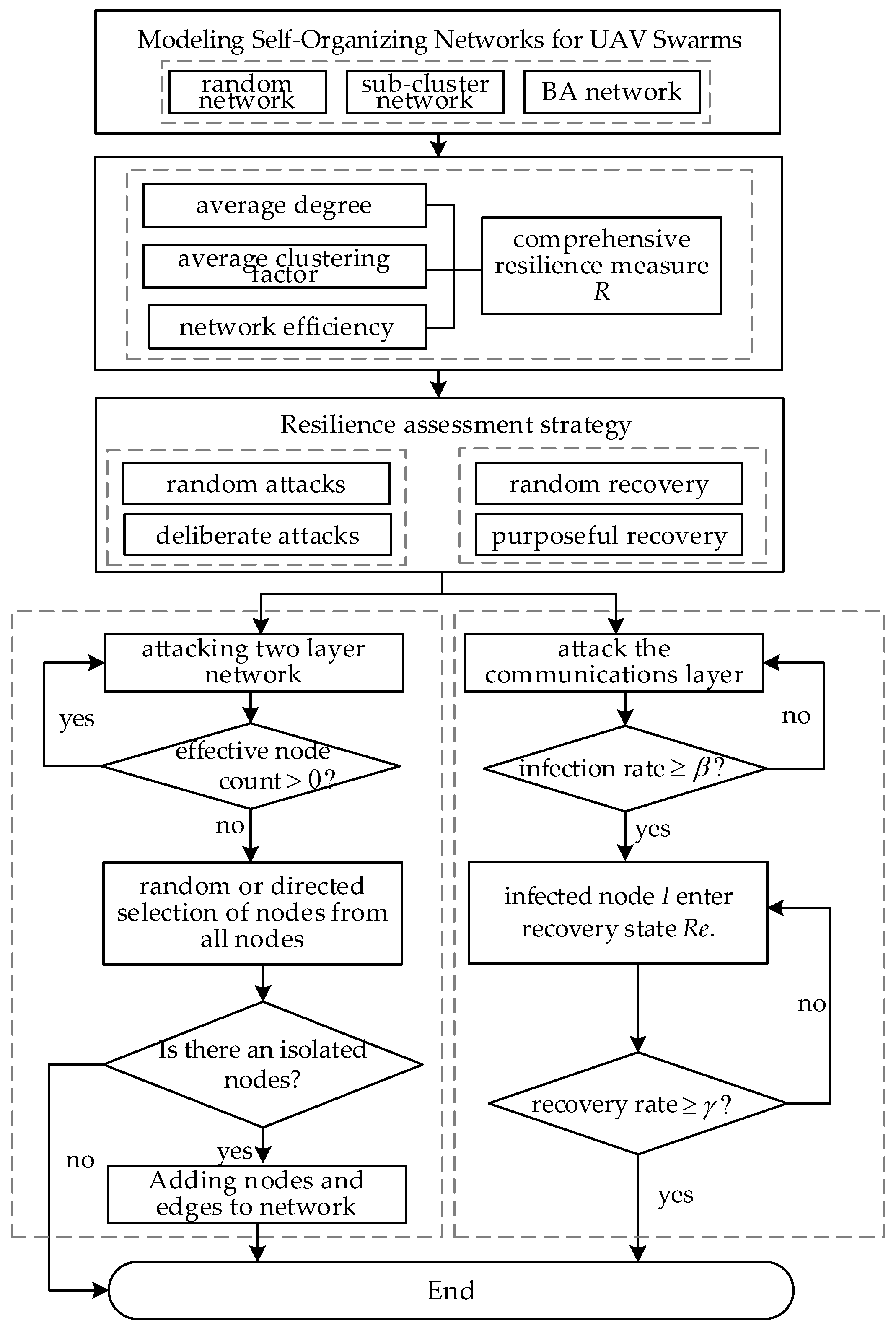
3.3. Resilience Assessment Strategy Options
3.4. Resilience Assessment Algorithm
3.4.1. Algorithm for Resilience Assessment Considering Dynamic Reconfiguration
- Input: double layer UAV swarm network and node set, including communication layer and structural layer;
- Output: dynamically reconfigured double layer UAV swarm network and a set of resilience indicators;
- Algorithm steps.
- (1)
- Randomly select a node from the communication layer and remove it from the communication layer;
- (2)
- Handle isolated nodes: if the removed node is isolated (not connected to any other node), select another node and establish a communication edge between them;
- (3)
- Repeat the above steps until all nodes are processed.
- (1)
- Randomly select a node from the structural layer and simultaneously remove it from both the communication and structural layers;
- (2)
- Handle isolated nodes: if the removed node is isolated, select another node and establish two edges between them in both the communication and structural layers;
- (3)
- Repeat the above steps until all nodes are processed.
| Algorithm 1: Algorithm for resilience assessment considering dynamic reconfiguration |
| Input: double layer UAV swarm network , ; node set Output: dynamically reconfigured double layer UAV swarm network , ; resilience indicators set 1: node removal and dynamic reconfiguration in communication layer : 2: while node number > 0 do 3: randomly or targetedly, choose nodes from 4: delete from 5: for each node in do 6: if an isolated node then |
| 7: randomly or targetedly, choose node from 8: add edge between and 9: end if 10: end for 11: node removal and dynamic reconfiguration in structural layer : 12: randomly or targetedly, choose nodes from 13: delete from 14: delete from 15: for each node in do 16: if an isolated node then 17: randomly or targetedly, choose node from 18: add an edge between and 19: add edge between and 20: end if 21: end for 22: end while 23: return () and R |
3.4.2. Algorithm for Resilience Assessment Considering Information Correlation
- Initialization: susceptible nodes S[x], infected nodes I[z], initial time t = 0;
- Output: double layer UAV swarm network with information correlation and a set of resilience indicators;
- Algorithm steps:
- (1)
- Targeted select some nodes in the network, label them as infected nodes, and simultaneously remove them from susceptible nodes;
- (2)
- Infection and recovery process: loop through the network; for each infected node, randomly select other nodes for infection based on the infection rate β, and randomly decide whether the node recovers based on the recovery rate γ;
- (3)
- Resilience indicator calculation: calculate the network’s resilience indicators after each loop;
- (4)
- Return results: return the adjusted network and set of resilience indicators when there are no susceptible or infected nodes in the network.
| Algorithm 2: Algorithm for resilience assessment considering information correlation |
| Input: double layer UAV swarm network , ; infection rate β; recovery rate γ Initialization: S[x], I[z], t = 0 Output: double layer UAV swarm network , with information correlation and resilience indicators set |
| 1: for p = 1 to m do 2: targeted chose nodes from 3: add to I[z]; z = z + 1 4: delete from S[x] 5: end for 6: while S[x] or I[z] not empty do 7: for i = 1 to z do 8: generate a random number r 9: if r < β then 10: targeted choose nodes from S[x] 11: add to I[z]; z = z + 1 12: delete from S[x] 13: end if 14: end for 15: for each node in I[z] do 16: generate random number r 17: if r < γ then 18: delete from , I[z]; z = z − 1 19: end if 20: end for 21: calculate the comprehensive resilience metric R 22: 23: end while 24: return () and R |
3.5. Algorithm Flow
4. Experimental Validation
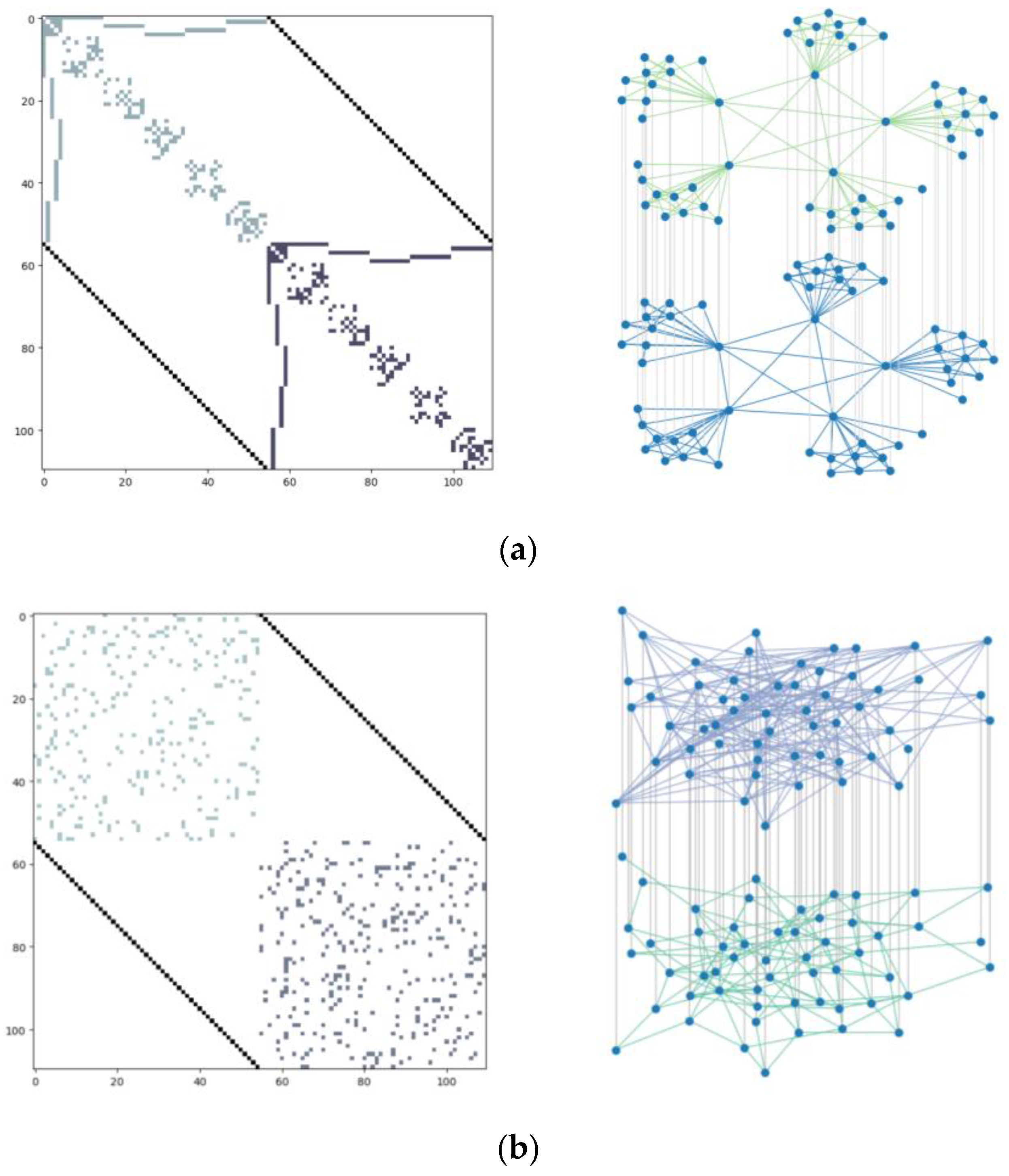
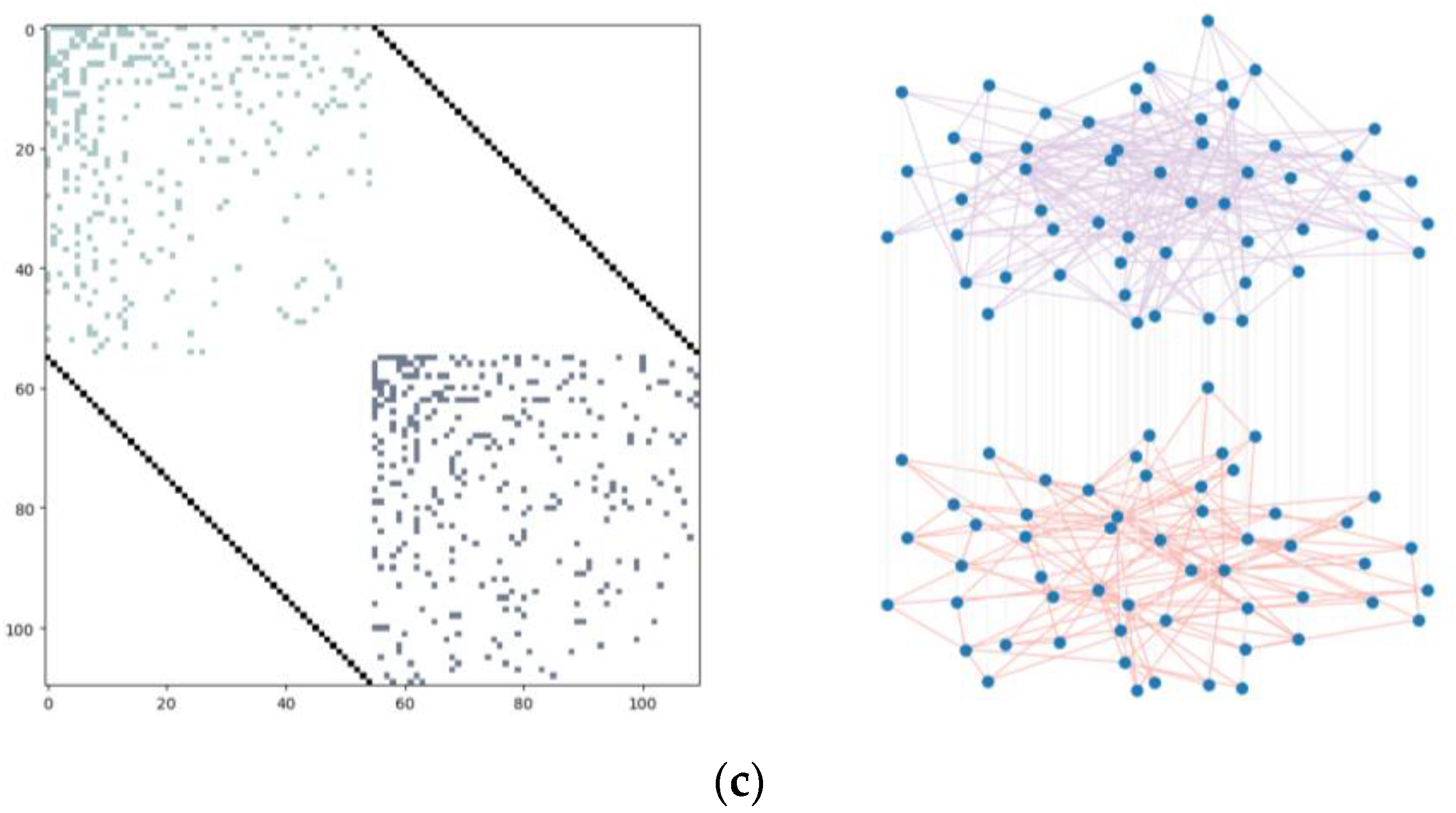
4.1. Modeling of a Double Layer Coupled Network
4.2. Resilience Assessment
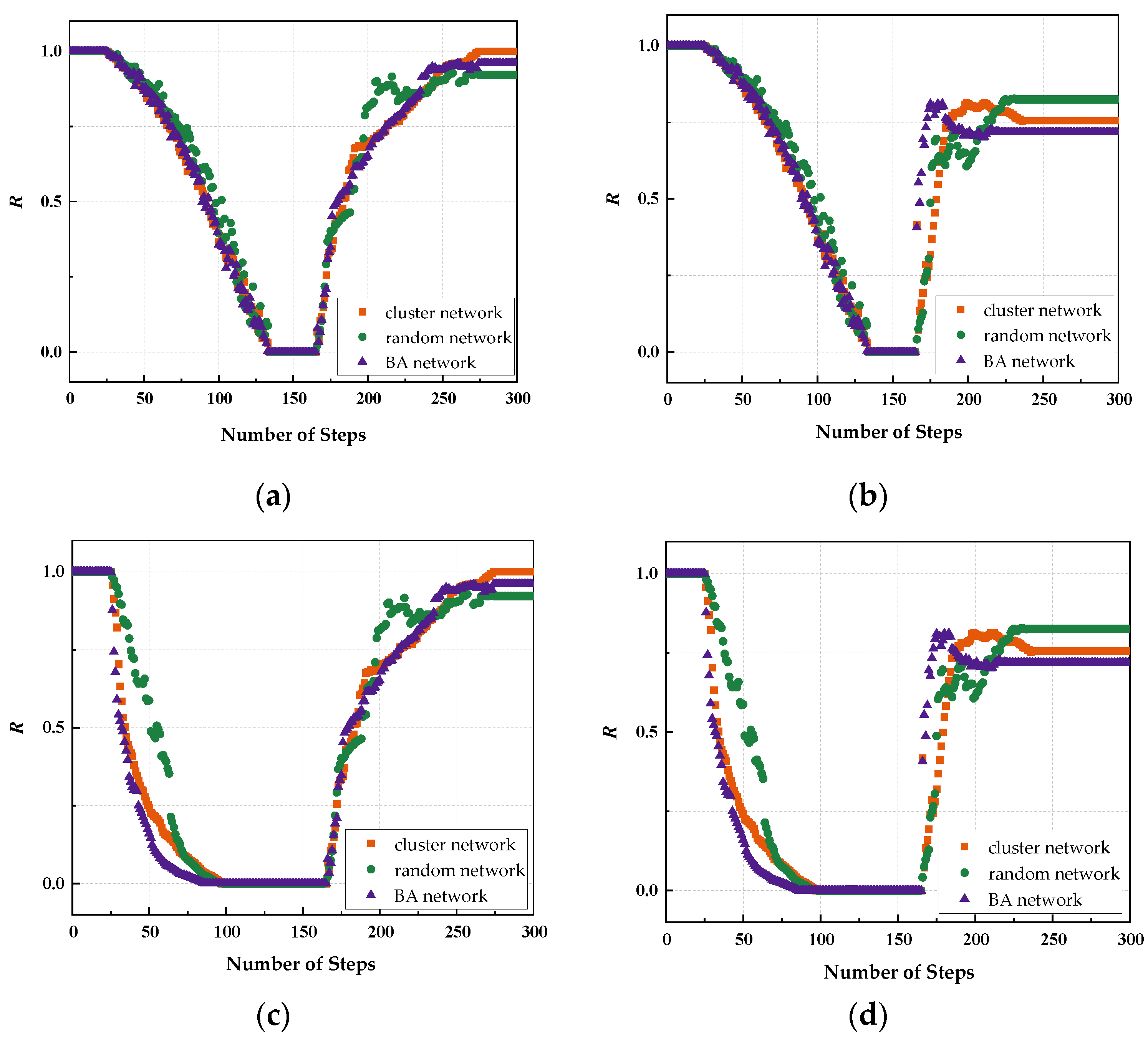
4.2.1. Resilience Assessment Methods Considering Dynamic Reconfiguration
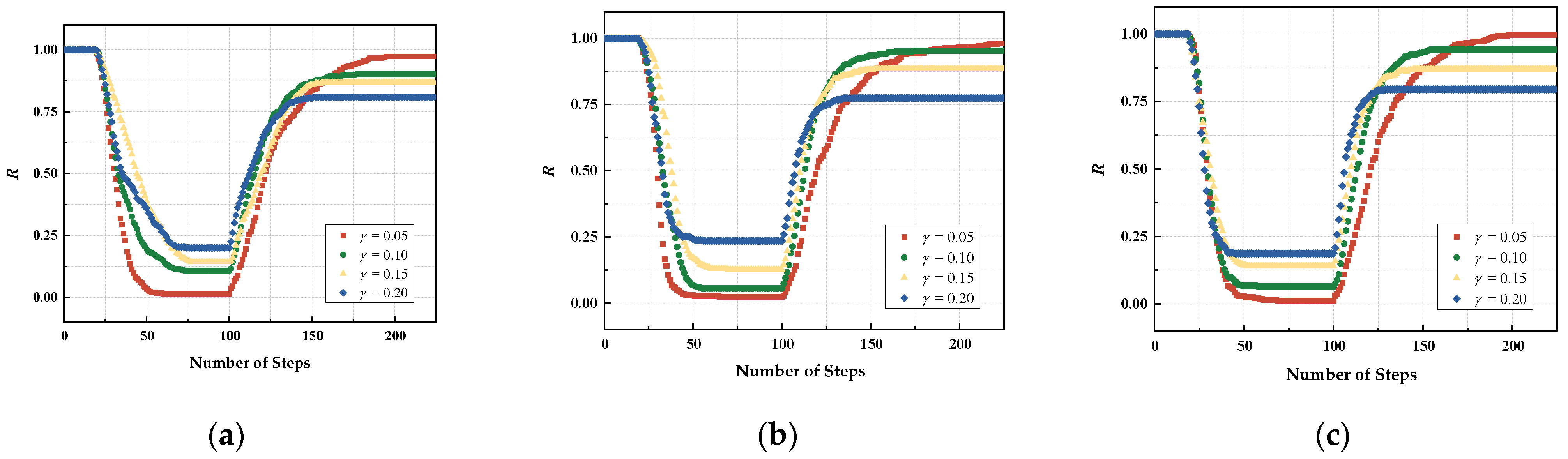
4.2.2. Resilience Assessment Methods Considering Information Correlation
5. Conclusions
- (1)
- The double layer coupling model of a UAV swarm complex network with three typical structures is proposed, which fully takes into account the different characteristics of the communication and structural layers of the UAV swarm self-organized network and can realize an effective simulation of the changes in the structure of the UAV swarm under the complex and changeable mission environment;
- (2)
- The proposed UAV swarm comprehensive resilience metric adopts three network topology indicators and determines their weights by the independence weight coefficient method, realizing the multidimensional extraction of the comprehensive metric and comprehensively and objectively assessing the system resilience;
- (3)
- Two different resilience assessment methods are proposed, in which the UAV swarm resilience assessment considering dynamic reconfiguration has a strong correlation with the network structure design and analyzes the resilience differences in the three network structures under different combinations of strategies; the UAV swarm resilience assessment considering the information correlation verifies the network resilience changes in the process of cascading failures induced by virus propagation and gives the resilience curves of the three network structures; and also the effects of different recovery rates on network resilience are analyzed. The resilience assessment results can be further used in the structural design and decision-making scenarios of UAV swarms.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xu, C.; Liao, X.; Tan, J.; Ye, H.; Lu, H. Recent research progress of unmanned aerial vehicle regulation policies and technologies in urban low altitude. IEEE Access 2020, 8, 74175–74194. [Google Scholar] [CrossRef]
- Sharma, A.; Vanjani, P.; Paliwal, N.; Basnayaka, C.M.W.; Jayakody, D.N.K.; Wang, H.C.; Muthuchidambaranathan, P. Communication and networking technologies for UAVs: A survey. J. Netw. Comput. Appl. 2020, 168, 102739. [Google Scholar] [CrossRef]
- Zhang, M.; Li, W.; Wang, M.; Li, S.; Li, B. Helicopter–UAVs search and rescue task allocation considering UAVs operating environment and performance. Comput. Ind. Eng. 2022, 167, 107994. [Google Scholar] [CrossRef]
- Xi, J.; Wang, C.; Liu, H.; Wang, Z. Dynamic output feedback guaranteed-cost synchronization for multiagent networks with given cost budgets. IEEE Access 2018, 6, 28923–28935. [Google Scholar] [CrossRef]
- Xi, J.; Wang, C.; Liu, H.; Wang, L. Completely distributed guaranteed-performance consensualization for high-order multiagent systems with switching topologies. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1338–1348. [Google Scholar] [CrossRef]
- Chen, G.; Wu, T.; Yang, F.; Wang, T.; Song, J.; Han, Z. Ultraviolet-based UAV swarm communications: Potentials and challenges. IEEE Wirel. Commun. 2022, 29, 84–90. [Google Scholar] [CrossRef]
- Zhang, Q.; Jiang, M.; Feng, Z.; Li, W.; Zhang, W.; Pan, M. IoT enabled UAV: Network architecture and routing algorithm. IEEE Internet Things J. 2019, 6, 3727–3742. [Google Scholar] [CrossRef]
- Gu, J.; Su, T.; Wang, Q.; Du, X.; Guizani, M. Multiple moving targets surveillance based on a cooperative network for multi-UAV. IEEE Commun. Mag. 2018, 56, 82–89. [Google Scholar] [CrossRef]
- Zhang, J.; Jiahao, X.I.N.G. Cooperative task assignment of multi-UAV system. Chin. J. Aeronaut. 2020, 33, 2825–2827. [Google Scholar] [CrossRef]
- Poudel, S.; Moh, S. Task assignment algorithms for unmanned aerial vehicle networks: A comprehensive survey. Veh. Commun. 2020, 35, 100469. [Google Scholar] [CrossRef]
- Han, Y.; Han, F.; Xian, D. Research on multi-Unmanned aerial vehicle joint delivery mission assignment based on multiple Alliance. Front. Comput. Intell. Syst. 2023, 3, 82–84. [Google Scholar] [CrossRef]
- Qadir, Z.; Ullah, F.; Munawar, H.S.; Al-Turjman, F. Addressing disasters in smart cities through UAVs path planning and 5G communications: A systematic review. Comput. Commun. 2021, 168, 114–135. [Google Scholar] [CrossRef]
- Chen, X.; Li, Q.; Li, R.; Cai, X.; Wei, J.; Zhao, H. UAV Network Path Planning and Optimization Using a Vehicle Routing Model. Remote Sens. 2023, 15, 2227. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, B.; Xiang, Y.; Li, C. Joint task assignment and path planning for truck and drones in mobile crowdsensing. Peer Peer Netw. Appl. 2023, 16, 1668–1679. [Google Scholar] [CrossRef]
- Chen, F.; Liu, Q.; Cong, X.; Dong, X.; Zhang, Y. Three-dimensional path planning of UAV in complex urban environment. Front. Comput. Intell. Syst. 2023, 3, 74–77. [Google Scholar] [CrossRef]
- Yu, X.; Jiang, N.; Wang, X.; Li, M. A hybrid algorithm based on grey wolf optimizer and differential evolution for UAV path planning. Expert Syst. Appl. 2023, 215, 119327. [Google Scholar] [CrossRef]
- Ziquan, Y.; Zhang, Y.; Jiang, B.; Jun, F.U.; Ying, J.I.N. A review on fault-tolerant cooperative control of multiple unmanned aerial vehicles. Chin. J. Aeronaut. 2022, 35, 1–18. [Google Scholar]
- Muslimov, T.Z.; Munasypov, R.A. Consensus-based cooperative control of parallel fixed-wing UAV formations via adaptive backstepping. Aerosp. Sci. Technol. 2021, 109, 106416. [Google Scholar] [CrossRef]
- Xu, D.; Chen, G. Autonomous and cooperative control of UAV cluster with multi-agent reinforcement learning. Aeronaut. J. 2022, 126, 932–951. [Google Scholar] [CrossRef]
- Oubbati, O.S.; Atiquzzaman, M.; Baz, A.; Alhakami, H.; Ben-Othman, J. Dispatch of UAVs for urban vehicular networks: A deep reinforcement learning approach. IEEE Trans. Veh. Technol. 2021, 70, 13174–13189. [Google Scholar] [CrossRef]
- Xie, H.; Su, F.; Yin, J.; Han, S.; Zhang, X. Research on network modeling and refined management of UAV flight conflicts in complex low altitude airspace. Acta Aeronaut. Astronaut. Sin. 2023, 44, 221–241. [Google Scholar]
- Del Genio, C.I.; Gómez-Gardeñes, J.; Bonamassa, I.; Boccaletti, S. Synchronization in networks with multiple interaction layers. Sci. Adv. 2016, 2, e1601679. [Google Scholar] [CrossRef] [PubMed]
- Wu, H.; Li, H.; Xiao, R.; Liu, J. Modeling and simulation of dynamic ant colony’s labor division for task allocation of UAV swarm. Phys. A Stat. Mech. Its Appl. 2018, 491, 127–141. [Google Scholar] [CrossRef]
- Tran, H.T.; Balchanos, M.; Domerçant, J.C.; Mavris, D.N. A framework for the quantitative assessment of performance-based system resilience. Reliab. Eng. Syst. Saf. 2017, 158, 73–84. [Google Scholar] [CrossRef]
- Cheng, C.; Bai, G.; Zhang, Y.A.; Tao, J. Improved integrated metric for quantitative assessment of resilience. Adv. Mech. Eng. 2020, 12, 1687814020906065. [Google Scholar] [CrossRef]
- Cheng, C.; Bai, G.; Zhang, Y.A.; Tao, J. Resilience evaluation for UAV swarm performing joint reconnaissance mission. Chaos Interdiscip. J. Nonlinear Sci. 2019, 29, 053132. [Google Scholar] [CrossRef] [PubMed]
- Bai, G.; Li, Y.; Fang, Y.; Zhang, Y.A.; Tao, J. Network approach for resilience evaluation of a UAV swarm by considering communication limits. Reliab. Eng. Syst. Saf. 2020, 193, 106602. [Google Scholar] [CrossRef]
- Zhang, P.; Wu, T.; Cao, R.; Li, Z.; Xu, J. UAV swarm resilience assessment considering load balancing. Front. Phys. 2022, 10, 15. [Google Scholar] [CrossRef]
- He, M.; Ma, Z.; Liu, J. Multi-intelligence tethering control algorithm based on influence degree mediator centrality. Control Decis. Mak. 2021, 36, 1442–1448. [Google Scholar]
- Dehghani, M.A.; Menhaj, M.B. Communication free leader–follower formation control of unmanned aircraft systems. Robot. Auton. Syst. 2016, 80, 69–75. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Complex Network Models | Type of Destruction | Type of Recovery | ||||
|---|---|---|---|---|---|---|---|
| Random Network | BA Network | WS (Watts–Strogatz) Network | Random Attack | Deliberate Attack | Random Recovery | Target Recovery | |
| Tran [24] | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Cheng C [25] | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Bai G [26] | ✓ | ✓ | ✓ | ||||
| Zhang P [27] | ✓ | ✓ | ✓ | ✓ | ✓ | ||
| Various | Define |
|---|---|
| k | The degree value |
| The probability of a randomly selected node with degree k | |
| q | The network layer; q = a indicates the communication layer; q = b indicates the structural layer |
| The node i of network layer G(q) | |
| The number of links | |
| Clustering factor | |
| d | Average path length |
| E | Network efficiency |
| R | Comprehensive evaluation indicator |
| Structure | Number of Nodes | Number of Edges | Average Degree | Average Path Length | Average Clustering Factor |
|---|---|---|---|---|---|
| (a) | 110 | 329 | 5.982 | 3.062 | 0.366 |
| (b) | 110 | 329 | 5.818 | 2.836 | 0.047 |
| (c) | 110 | 329 | 5.997 | 2.614 | 0.120 |
| Network Performance Minimum | Network Performance Maximum | |||||
|---|---|---|---|---|---|---|
| (a) | (b) | (c) | (a) | (b) | (c) | |
| 0.05 | 0.0153 | 0.0244 | 0.0122 | 0.9728 | 0.9847 | 0.9969 |
| 0.10 | 0.1071 | 0.0552 | 0.0640 | 0.9013 | 0.9540 | 0.9421 |
| 0.15 | 0.1423 | 0.1256 | 0.1399 | 0.8669 | 0.8836 | 0.8692 |
| 0.20 | 0.2002 | 0.2347 | 0.1864 | 0.8089 | 0.7745 | 0.7951 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, J. Research on UAV Swarm Network Modeling and Resilience Assessment Methods. Sensors 2024, 24, 11. https://doi.org/10.3390/s24010011
Zhang X, Liu J. Research on UAV Swarm Network Modeling and Resilience Assessment Methods. Sensors. 2024; 24(1):11. https://doi.org/10.3390/s24010011
Chicago/Turabian StyleZhang, Xinjue, and Jixin Liu. 2024. "Research on UAV Swarm Network Modeling and Resilience Assessment Methods" Sensors 24, no. 1: 11. https://doi.org/10.3390/s24010011
APA StyleZhang, X., & Liu, J. (2024). Research on UAV Swarm Network Modeling and Resilience Assessment Methods. Sensors, 24(1), 11. https://doi.org/10.3390/s24010011