
Uneven Terrain Recognition Using Neuromorphic Haptic Feedback
 , , ,
, , ,  , ,
, , 
Abstract
1. Introduction
2. Materials and Methods
2.1. Experimental Setup
2.2. Feedback Strategy and Spiking Neuronal Network Architecture
2.3. Experimental Protocol and Psychophysics
2.4. Psychophysical Data Analysis and Data Pre-Processing
2.5. Algorithm Decoding
3. Results
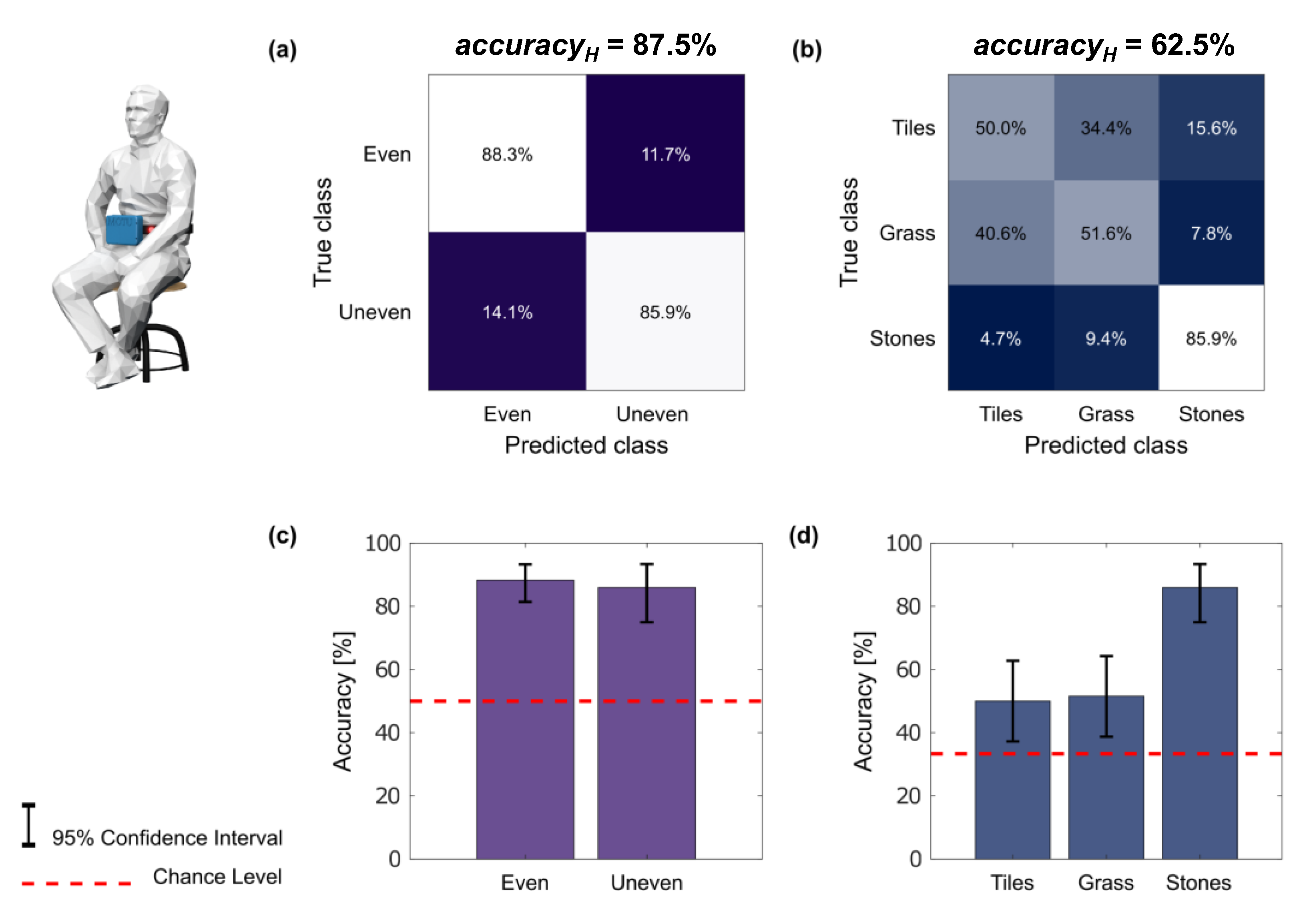
3.1. Haptic Feedback for Discrimination of Uneven Terrains
3.2. Decoding of the Neuromorphic Haptic Feedback for the Population-Wise Terrain Recognition
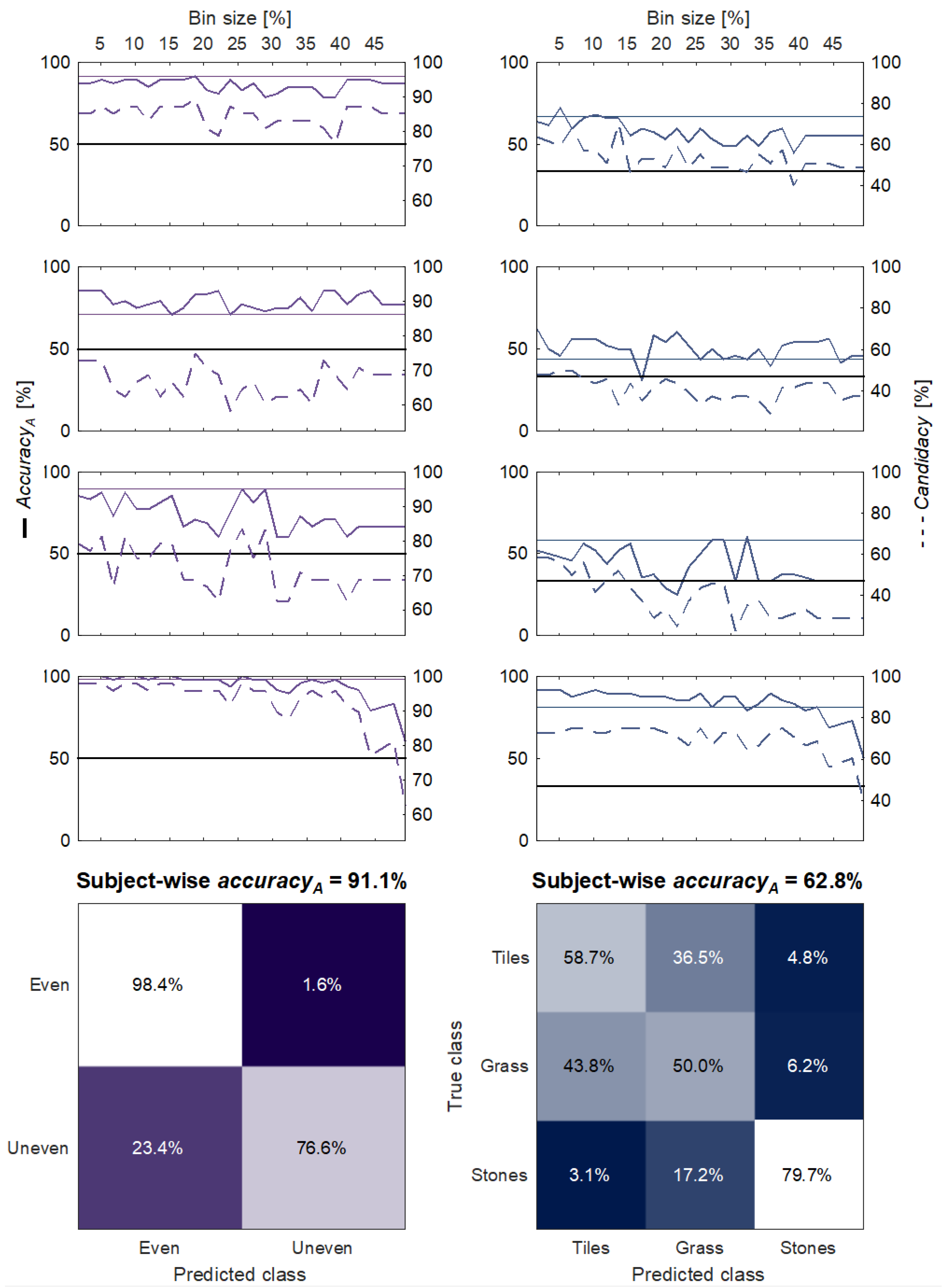
3.3. Estimation of the Human Decoding Temporal Dynamics through the Subject-Wise Algorithm Performance
3.4. Effect of the Different Combinations of VTs
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Alfuth, M.; Rosenbaum, D. Effects of changes in plantar sensory feedback on human gait characteristics: A systematic review. Footwear Sci. 2012, 4, 1–22. [Google Scholar] [CrossRef]
- Kavounoudias, A.; Roll, R.; Roll, J.-P. The plantar sole is a ‘dynamometric map’ for human balance control. Neuroreport 1998, 9, 3247–3252. [Google Scholar] [CrossRef] [PubMed]
- Petrini, F.M.; Valle, G.; Bumbasirevic, M.; Barberi, F.; Bortolotti, D.; Cvancara, P.; Hiairrassary, A.; Mijovic, P.; Sverrisson, A.; Pedrocchi, A.; et al. Enhancing functional abilities and cognitive integration of the lower limb prosthesis. Sci. Transl. Med. 2019, 11, 512. [Google Scholar] [CrossRef] [PubMed]
- Stolyarov, R.M.; Carney, M.E.; Herr, H. Accurate Heuristic Terrain Prediction in Powered Lower-Limb Prostheses Using Onboard Sensors. IEEE Trans. Biomed. Eng. 2020, 68, 384–392. [Google Scholar] [CrossRef]
- Diaz, J.P.; da Silva, R.L.; Zhong, B.; Huang, H.H.; Lobaton, E. Visual Terrain Identification and Surface Inclination Estimation for Improving Human Locomotion with a Lower-Limb Prosthetic. In Proceedings of the 2018 40th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Honolulu, HI, USA, 18–21 July 2018; pp. 1817–1820. [Google Scholar] [CrossRef]
- Grunwald, M. Human Haptic Perception: Basics and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2008. [Google Scholar] [CrossRef]
- Knaepen, K.; Marusic, U.; Crea, S.; Rodríguez Guerrero, C.D.; Vitiello, N.; Pattyn, N.; Mairesse, O.; Lefeber, D.; Meeusen, R. Psychophysiological response to cognitive workload during symmetrical, asymmetrical and dual-task walking. Hum. Mov. Sci. 2015, 40, 248–263. [Google Scholar] [CrossRef]
- Czerniecki, J.M.; Morgenroth, D.C. Metabolic energy expenditure of ambulation in lower extremity amputees: What have we learned and what are the next steps? Disabil. Rehabil. 2017, 39, 143–151. [Google Scholar] [CrossRef]
- Oddo, C.M.; Raspopovic, S.; Artoni, F.; Mazzoni, A.; Spigler, G.; Petrini, F.; Giambattistelli, F.; Vecchio, F.; Miraglia, F.; Zollo, L.; et al. Intraneural stimulation elicits discrimination of textural features by artificial fingertip in intact and amputee humans. eLife 2016, 5, e09148. [Google Scholar] [CrossRef] [PubMed]
- Petrini, F.M.; Bumbasirevic, M.; Valle, G.; Ilic, V.; Mijović, P.; Čvančara, P.; Barberi, F.; Katic, N.; Bortolotti, D.; Andreu, D.; et al. Sensory feedback restoration in leg amputees improves walking speed, metabolic cost and phantom pain. Nat. Med. 2019, 25, 1356–1363. [Google Scholar] [CrossRef]
- Darter, B.J.; Wilken, J. Gait training with virtual reality–based real-time feedback: Improving gait performance following transfemoral amputation. Phys. Ther. 2011, 91, 1385–1394. [Google Scholar] [CrossRef]
- Crea, S.; Edin, B.B.; Knaepen, K.; Meeusen, R.; Vitiello, N. Time-discrete vibrotactile feedback contributes to improved gait symmetry in patients with lower limb amputations: Case series. Phys. Ther. 2017, 97, 198–207. [Google Scholar] [CrossRef]
- Escamilla-Nunez, R.; Michelini, A.; Andrysek, J. Biofeedback systems for gait rehabilitation of individuals with lower-limb amputation: A systematic review. Sensors 2020, 20, 1628. [Google Scholar] [CrossRef] [PubMed]
- Raspopovic, S.; Valle, G.; Petrini, F.M. Sensory feedback for limb prostheses in amputees. Nat. Mater. 2021, 20, 925–939. [Google Scholar] [CrossRef]
- Shokur, S.; Gallo, S.; Moioli, R.C.; Donati, A.R.C.; Morya, E.; Bleuler, H.; Nicolelis, M.A. Assimilation of virtual legs and perception of floor texture by complete paraplegic patients receiving artificial tactile feedback. Sci. Rep. 2016, 6, 32293. [Google Scholar] [CrossRef] [PubMed]
- Ernst, M.O.; Bülthoff, H. Merging the senses into a robust percept. Trends Cogn. Sci. 2004, 8, 162–169. [Google Scholar] [CrossRef]
- Choi, S.; Kuchenbecker, K.J. Vibrotactile Display: Perception, Technology, and Applications. Proc. IEEE 2012, 101, 2093–2104. [Google Scholar] [CrossRef]
- Svensson, P.; Wijk, U.; Björkman, A.; Antfolk, C. A review of invasive and non-invasive sensory feedback in upper limb prostheses. Expert Rev. Med. Devices 2017, 14, 439–447. [Google Scholar] [CrossRef]
- Lauretti, C.; Pinzari, G.; Ciancio, A.L.; Davalli, A.; Sacchetti, R.; Sterzi, S.; Guglielmelli, E.; Zollo, L. A vibrotactile stimulation system for improving postural control and knee joint proprioception in lower-limb amputees. In Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), Lisbon, Portugal, 28–31 August 2017; pp. 88–93. [Google Scholar] [CrossRef]
- Duclos, C.; Roll, R.; Kavounoudias, A.; Roll, J.-P.; Forget, R. Vibration-induced post-effects: A means to improve postural asymmetry in lower leg amputees? Gait Posture 2007, 26, 595–602. [Google Scholar] [CrossRef]
- Rusaw, D.; Hagberg, K.; Nolan, L.; Ramstrand, N. Can vibratory feedback be used to improve postural stability in persons with transtibial limb loss? J. Rehabil. Res. Dev. 2012, 49, 1239–1254. [Google Scholar] [CrossRef]
- Sienko, K.H.; Balkwill, M.D.; Oddsson, L.I.E.; Wall, C. The effect of vibrotactile feedback on postural sway during locomotor activities. J. Neuroeng. Rehabil. 2013, 10, 93. [Google Scholar] [CrossRef]
- Martini, E.; Cesini, I.; D’Abbraccio, J.; Arnetoli, G.; Doronzio, S.; Giffone, A.; Meoni, B.; Oddo, C.M.; Vitiello, N.; Crea, S. Increased Symmetry of Lower-Limb Amputees Walking With Concurrent Bilateral Vibrotactile Feedback. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 29, 74–84. [Google Scholar] [CrossRef]
- Pagel, A.; Arieta, A.H.; Riener, R.; Vallery, H. Effects of sensory augmentation on postural control and gait symmetry of transfemoral amputees: A case description. Med. Biol. Eng. Comput. 2015, 54, 1579–1589. [Google Scholar] [CrossRef] [PubMed]
- Yang, L.; Dyer, P.; Carson, R.; Webster, J.; Foreman, K.B.; Bamberg, S. Utilization of a lower extremity ambulatory feedback system to reduce gait asymmetry in transtibial amputation gait. Gait Posture 2012, 36, 631–634. [Google Scholar] [CrossRef] [PubMed]
- Plauche, A.; Villarreal, D.; Gregg, R.D. A Haptic Feedback System for Phase-Based Sensory Restoration in Above-Knee Prosthetic Leg Users. IEEE Trans. Haptics 2016, 9, 421–426. [Google Scholar] [CrossRef]
- Kent, J.A.; Takahashi, K.Z.; Stergiou, N. Uneven terrain exacerbates the deficits of a passive prosthesis in the regulation of whole body angular momentum in individuals with a unilateral transtibial amputation. J. Neuroeng. Rehabil. 2019, 16, 25. [Google Scholar] [CrossRef] [PubMed]
- Kendell, C.; Lemaire, E.; Dudek, N.; Kofman, J. Indicators of dynamic stability in transtibial prosthesis users. Gait Posture 2010, 31, 375–379. [Google Scholar] [CrossRef]
- Tokur, D.; Grimmer, M.; Seyfarth, A. Review of balance recovery in response to external perturbations during daily activities. Hum. Mov. Sci. 2019, 69, 102546. [Google Scholar] [CrossRef]
- Gates, D.H.; Scott, S.J.; Wilken, J.M.; Dingwell, J.B. Frontal plane dynamic margins of stability in individuals with and without transtibial amputation walking on a loose rock surface. Gait Posture 2013, 38, 570–575. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Luo, L.; Pi, M.; Li, Z.; Li, Q.; Zhao, K.; Huang, J. EEG-Based Volitional Control of Prosthetic Legs for Walking in Different Terrains. IEEE Trans. Autom. Sci. Eng. 2019, 18, 530–540. [Google Scholar] [CrossRef]
- Zhang, F.; Fang, Z.; Liu, M.; Huang, H. Preliminary design of a terrain recognition system. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC 2011), Boston, MA, USA, 30 August–3 September 2011; pp. 5452–5455. [Google Scholar]
- Ni, J.; Wang, Z.; Li, F.; Su, Z.; Cao, W.; Chen, C. Terrain environment classification and recognition for soft lower-limb exosuit. In Proceedings of the 2021 IEEE International Conference on Real-Time Computing and Robotics, RCAR 2021, Xining, China, 15–19 July 2021; pp. 480–485. [Google Scholar] [CrossRef]
- Sie, A.; Realmuto, J.; Rombokas, E. A lower limb prosthesis haptic feedback system for stair descent. In Proceedings of the 2017 Design of Medical Devices Conference, Minneapolis, MN, USA, 10–13 April 2017; ASME: Washington, DC, USA, 2017; p. V001T05A004. [Google Scholar] [CrossRef]
- Rokhmanova, N.; Rombokas, E. Vibrotactile feedback improves foot placement perception on stairs for lower-limb prosthesis users. In Proceedings of the 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 24–28 June 2019; pp. 1215–1220. [Google Scholar]
- Wan, A.H.; Wong, D.W.-C.; Ma, C.Z.-H.; Zhang, M.; Lee, W.C. Wearable Vibrotactile Biofeedback Device Allowing Identification of Different Floor Conditions for Lower-Limb Amputees. Arch. Phys. Med. Rehabil. 2016, 97, 1210–1213. [Google Scholar] [CrossRef]
- Delhaye, B.; Hayward, V.; Lefèvre, P.; Thonnard, J.-L. Texture-induced vibrations in the forearm during tactile exploration. Front. Behav. Neurosci. 2012, 6, 37. [Google Scholar] [CrossRef]
- Weber, A.I.; Saal, H.P.; Lieber, J.D.; Cheng, J.-W.; Manfredi, L.R.; Dammann, J.F.; Bensmaia, S.J. Spatial and temporal codes mediate the tactile perception of natural textures. Proc. Natl. Acad. Sci. USA 2013, 110, 17107–17112. [Google Scholar] [CrossRef] [PubMed]
- Rongala, U.B.; Mazzoni, A.; Oddo, C.M. Neuromorphic Artificial Touch for Categorization of Naturalistic Textures. IEEE Trans. Neural Netw. Learn. Syst. 2015, 28, 819–829. [Google Scholar] [CrossRef] [PubMed]
- Kaspar, K.; König, S.; Schwandt, J.; König, P. The experience of new sensorimotor contingencies by sensory augmentation. Conscious. Cogn. 2014, 28, 47–63. [Google Scholar] [CrossRef] [PubMed]
- Schumann, F.; O’regan, J.K. Sensory augmentation: Integration of an auditory compass signal into human perception of space. Sci. Rep. 2017, 7, srep42197. [Google Scholar] [CrossRef] [PubMed]
- Sorgini, F.; Massari, L.; D’abbraccio, J.; Palermo, E.; Menciassi, A.; Petrovic, P.B.; Mazzoni, A.; Carrozza, M.C.; Newell, F.N.; Oddo, C.M. Neuromorphic vibrotactile stimulation of fingertips for encoding object stiffness in telepresence sensory substitution and augmentation applications. Sensors 2018, 18, 261. [Google Scholar] [CrossRef]
- Cesini, I.; Spigler, G.; Prasanna, S.; Taxis, D.; Dell’agnello, F.; Martini, E.; Crea, S.; Vitiello, N.; Mazzoni, A.; Oddo, C.M. A wearable haptic feedback system for assisting lower-limb amputees in multiple locomotion tasks. In Proceedings of the Wearable Robotics: Challenges and Trends, WeRob 2018, Pisa, Italy, 16–20 October 2018; Springer: Cham, Switzerland; Edinburgh, UK, 2018; Volume 22. [Google Scholar] [CrossRef]
- Prasanna, S.; Massari, L.; Sinibaldi, E.; Detry, R.J.; Bowkett, J.; Carpenter, K.C.; Oddo, C.M. Neuromorphic tactile sensor array based on fiber Bragg gratings to encode object qualities. Proc. SPIE 2019, 11136, 1113608. [Google Scholar] [CrossRef]
- Martini, E.; Fiumalbi, T.; Dell’agnello, F.; Ivanić, Z.; Munih, M.; Vitiello, N.; Crea, S. Pressure-sensitive insoles for real-time gait-related applications. Sensors 2020, 20, 1448. [Google Scholar] [CrossRef]
- Crea, S.; Donati, M.; De Rossi, S.M.M.; Oddo, C.M.; Vitiello, N. A Wireless Flexible Sensorized Insole for Gait Analysis. Sensors 2014, 14, 1073–1093. [Google Scholar] [CrossRef]
- Cesini, I.; Spigler, G.; Prasanna, S.; D’abbraccio, J.; De Luca, D.; Dell’agnello, F.; Crea, S.; Vitiello, N.; Mazzoni, A.; Oddo, C.M. Assessment of Intuitiveness and Comfort of Wearable Haptic Feedback Strategies for Assisting Level and Stair Walking. Electronics 2020, 9, 1676. [Google Scholar] [CrossRef]
- Cesini, I.; Martini, E.; Filosa, M.; Spigler, G.; Sabatini, A.M.; Vitiello, N.; Oddo, C.M.; Crea, S. Perception of Time-Discrete Haptic Feedback on the Waist is Invariant With Gait Events. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 1595–1604. [Google Scholar] [CrossRef]
- Izhikevich, E.M. Simple model of spiking neurons. IEEE Trans. Neural Netw. 2003, 14, 1569–1572. [Google Scholar] [CrossRef] [PubMed]
- Wang, D.; Tan, D.; Liu, L. Particle swarm optimization algorithm: An overview. Soft Comput. 2018, 22, 387–408. [Google Scholar] [CrossRef]
- Victor, J.D.; Purpura, K.P. Nature and precision of temporal coding in visual cortex: A metric-space analysis. J. Neurophysiol. 1996, 76, 1310–1326. [Google Scholar] [CrossRef] [PubMed]
- Kaas, A.L.; Stoeckel, M.C.; Goebel, R. The neural bases of haptic working memory. In Human Haptic Perception: Basics and Applications; Spinger: Berlin/Heidelberg, Germany, 2008; pp. 113–129. [Google Scholar] [CrossRef]
- Fan, R.E.; Culjat, M.O.; King, C.-H.; Franco, M.L.; Boryk, R.; Bisley, J.W.; Dutson, E.; Grundfest, W.S. A haptic feedback system for lower-limb prostheses. IEEE Trans. Neural Syst. Rehabil. Eng. 2008, 16, 270–277. [Google Scholar] [CrossRef]
- O’Regan, J.K.; Noë, A. A sensorimotor account of vision and visual consciousness. Behav. Brain Sci. 2001, 24, 939–973. [Google Scholar] [CrossRef]
- Eils, E.; Nolte, S.; Tewes, M.; Thorwesten, L.; Völker, K.; Rosenbaum, D. Modified pressure distribution patterns in walking following reduction of plantar sensation. J. Biomech. 2002, 35, 1307–1313. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| AccuracyH | AccuracyA | Candidacy | ||
|---|---|---|---|---|
| Subject 1 | Even | 90.6% | 100% | 93.5% |
| Uneven | 93.8% | 75% | 81.2% | |
| All | 91.7% | 91.5% | 89.4% | |
| Subject 2 | Even | 68.8% | 93.8% | 68.8% |
| Uneven | 75% | 62.5% | 87.5% | |
| All | 70.8% | 83.3% | 75% | |
| Subject 3 | Even | 93.8% | 100% | 93.8% |
| Uneven | 81.2% | 68.8% | 62.5% | |
| All | 89.6% | 89.6% | 83.3% | |
| Subject 4 | Even | 100% | 100% | 100% |
| Uneven | 93.8% | 100% | 93.8% | |
| All | 97.9% | 100% | 97.9% | |
| All | All | 87.5% | 91.1% | 86.4% |
| AccuracyH | AccuracyA | Candidacy | ||
|---|---|---|---|---|
| Subject 1 | Tiles | 50.0% | 60% | 53.3% |
| Grass | 56.2% | 68.8% | 87.5% | |
| Stones | 93.8% | 68.8% | 68.8% | |
| All | 66.7% | 66% | 70.2% | |
| Subject 2 | Tiles | 18.8% | 56.2% | 18.8% |
| Grass | 37.5% | 12.5% | 56.2% | |
| Stones | 75% | 68.8% | 75% | |
| All | 43.8% | 45.8% | 50% | |
| Subject 3 | Tiles | 37.5% | 31.2% | 56.2% |
| Grass | 56.2% | 43.8% | 43.8% | |
| Stones | 81.2% | 81.2% | 75.0% | |
| All | 58.3% | 52.1% | 58.3% | |
| Subject 4 | Tiles | 93.8% | 87.5% | 93.8% |
| Grass | 56.2% | 75% | 37.5% | |
| Stones | 93.8% | 100% | 93.8% | |
| All | 81.2% | 87.5% | 75% | |
| All | All | 62.5% | 62.8% | 63.4% |
| Subject1 | Subject2 | Subject3 | Subject4 | |
|---|---|---|---|---|
| VT1 | 91.5% (89.4%) | 56.2% (68.8%) | 68.8% (66.7%) | 68.8% (66.7%) |
| VT2 | 83% (85.1%) | 72.9% (85.4%) | 83.3% (89.6%) | 95.8% (97.9%) |
| VT3 | 87.2% (89.4%) | 68.8% (77.1%) | 70.8% (72.9%) | 77.1% (79.2%) |
| VT1-VT2 | 91.5% (89.4%) | 72.9% (85.4%) | 83.3% (89.6%) | 97.9% (100%) |
| VT1-VT3 | 87.2% (89.4%) | 68.8% (77.1%) | 72.9% (75%) | 77.1% (79.2%) |
| VT2-VT3 | 87.2% (89.4%) | 75% (83.3%) | 83.3% (89.6%) | 97.9% (100%) |
| All VTs | 89.4% (91.5%) | 75% (83.3%) | 83.3% (89.6%) | 97.9% (100%) |
| Subject1 | Subject2 | Subject3 | Subject4 | |
|---|---|---|---|---|
| VT1 | 57.4% (59.6%) | 37.5% (52.1%) | 37.5% (39.6%) | 54.2% (60.4%) |
| VT2 | 48.9% (53.2%) | 52.1% (52.1%) | 54.2% (50%) | 72.9% (87.5%) |
| VT3 | 59.6% (63.8%) | 41.7% (52.1%) | 39.6% (39.6%) | 66.7% (68.8%) |
| VT1-VT2 | 70.2% (72.3%) | 50% (60.4%) | 56.2% (54.2%) | 75% (89.6%) |
| VT1-VT3 | 59.6% (59.6%) | 41.7% (47.9%) | 50% (43.8%) | 66.7% (72.9%) |
| VT2-VT3 | 57.4% (63.8%) | 50% (60.4%) | 66.7% (56.2%) | 75% (87.5%) |
| All VTs | 70.2% (66%) | 50% (45.8%) | 58.3% (52.1%) | 75% (87.5%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prasanna, S.; D’Abbraccio, J.; Filosa, M.; Ferraro, D.; Cesini, I.; Spigler, G.; Aliperta, A.; Dell’Agnello, F.; Davalli, A.; Gruppioni, E.; et al. Uneven Terrain Recognition Using Neuromorphic Haptic Feedback. Sensors 2023, 23, 4521. https://doi.org/10.3390/s23094521
Prasanna S, D’Abbraccio J, Filosa M, Ferraro D, Cesini I, Spigler G, Aliperta A, Dell’Agnello F, Davalli A, Gruppioni E, et al. Uneven Terrain Recognition Using Neuromorphic Haptic Feedback. Sensors. 2023; 23(9):4521. https://doi.org/10.3390/s23094521
Chicago/Turabian StylePrasanna, Sahana, Jessica D’Abbraccio, Mariangela Filosa, Davide Ferraro, Ilaria Cesini, Giacomo Spigler, Andrea Aliperta, Filippo Dell’Agnello, Angelo Davalli, Emanuele Gruppioni, and et al. 2023. "Uneven Terrain Recognition Using Neuromorphic Haptic Feedback" Sensors 23, no. 9: 4521. https://doi.org/10.3390/s23094521
APA StylePrasanna, S., D’Abbraccio, J., Filosa, M., Ferraro, D., Cesini, I., Spigler, G., Aliperta, A., Dell’Agnello, F., Davalli, A., Gruppioni, E., Crea, S., Vitiello, N., Mazzoni, A., & Oddo, C. M. (2023). Uneven Terrain Recognition Using Neuromorphic Haptic Feedback. Sensors, 23(9), 4521. https://doi.org/10.3390/s23094521