
Stochastic Resonance with Parameter Estimation for Enhancing Unknown Compound Fault Detection of Bearings



Abstract
:1. Introduction
2. A Parameter-Matched Second-Order SR Method
- Signal pre-processing. In general, the bearing vibration signal v(t) is a large-parameter signal where the bearing fault characteristics are modulated by natural vibration from the machinery itself. Hence, some signal demodulations are performed to the raw signals. Here, Hilbert envelope demodulation is used to pre-process the raw vibration signal of the tested bearing, and the corresponding envelope signal is denoted as .
- Noise intensity estimation. In Equation (14), an important parameter , namely, noise intensity, needs to be estimated from the envelope signal of the raw signal of the tested bearing. Here, we use the principle of maximum likelihood estimation (MLE) [32] to achieve this, and we can obtain . The MLE algorithm can be downloaded by using the following website: http://www.biomecardio.com/matlab/evar_doc.html (accessed on 5 December 2022).
- Damping factor initialization. The damping factor needs to be tuned to obtain the optimal detected result. Here, according to its range in Equation (15), we initialize the damping factor .
- Output signal calculation and evaluation. By substituting , and the corresponding damping factor into Equation (16), we can obtain the output signal . Then, we can calculate the corresponding as the objective function for optimizing the damping factor. Finally, the optimal is substituted into Equation (17) to solve the optimal .
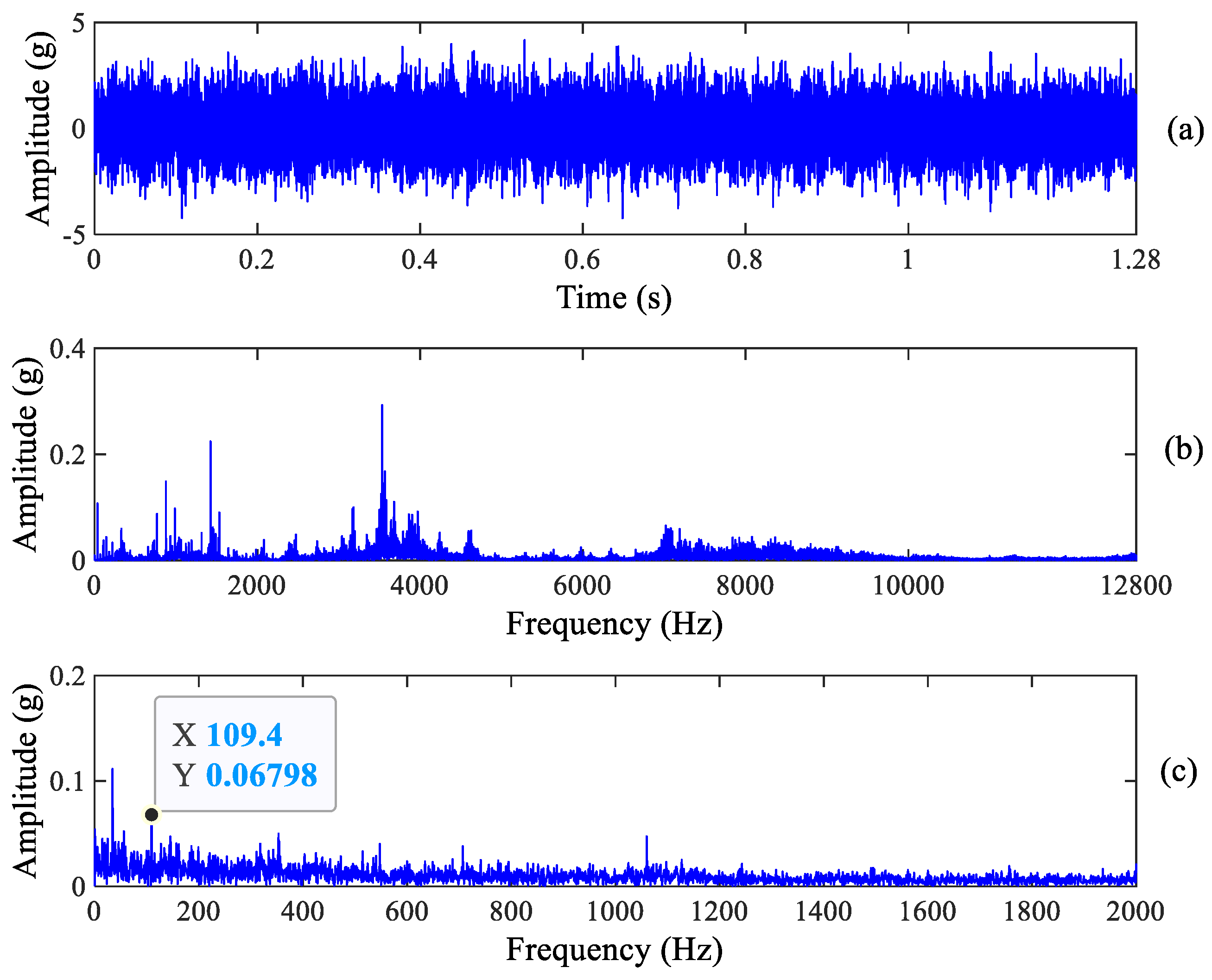
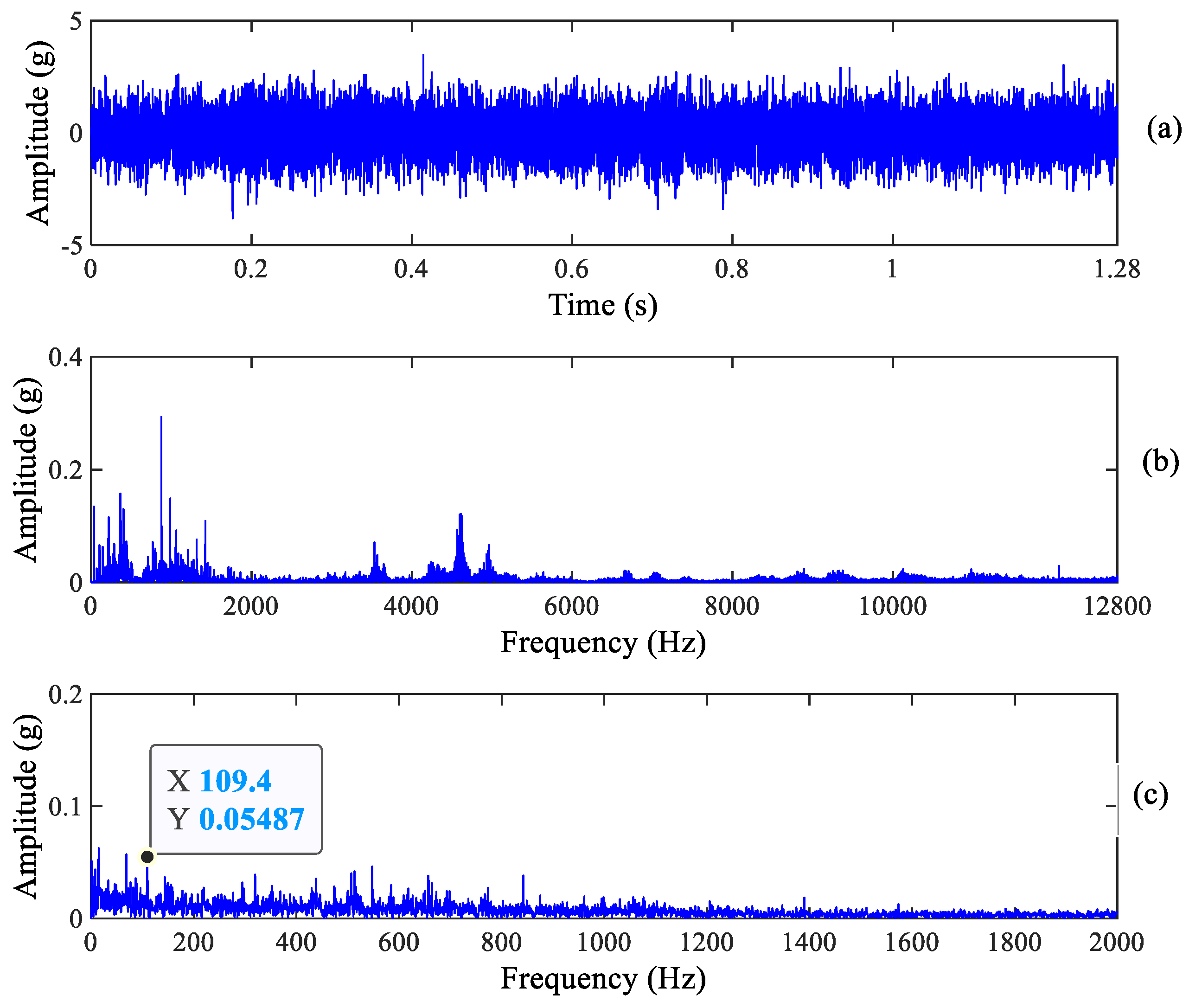
- Signal post-processing. Output the optimal corresponding to the maximum of SNRG as the detected signal. Here, the frequency spectral analysis is used to process the optimal for observing the spectral peaks at the fault characteristic frequencies of bearings.
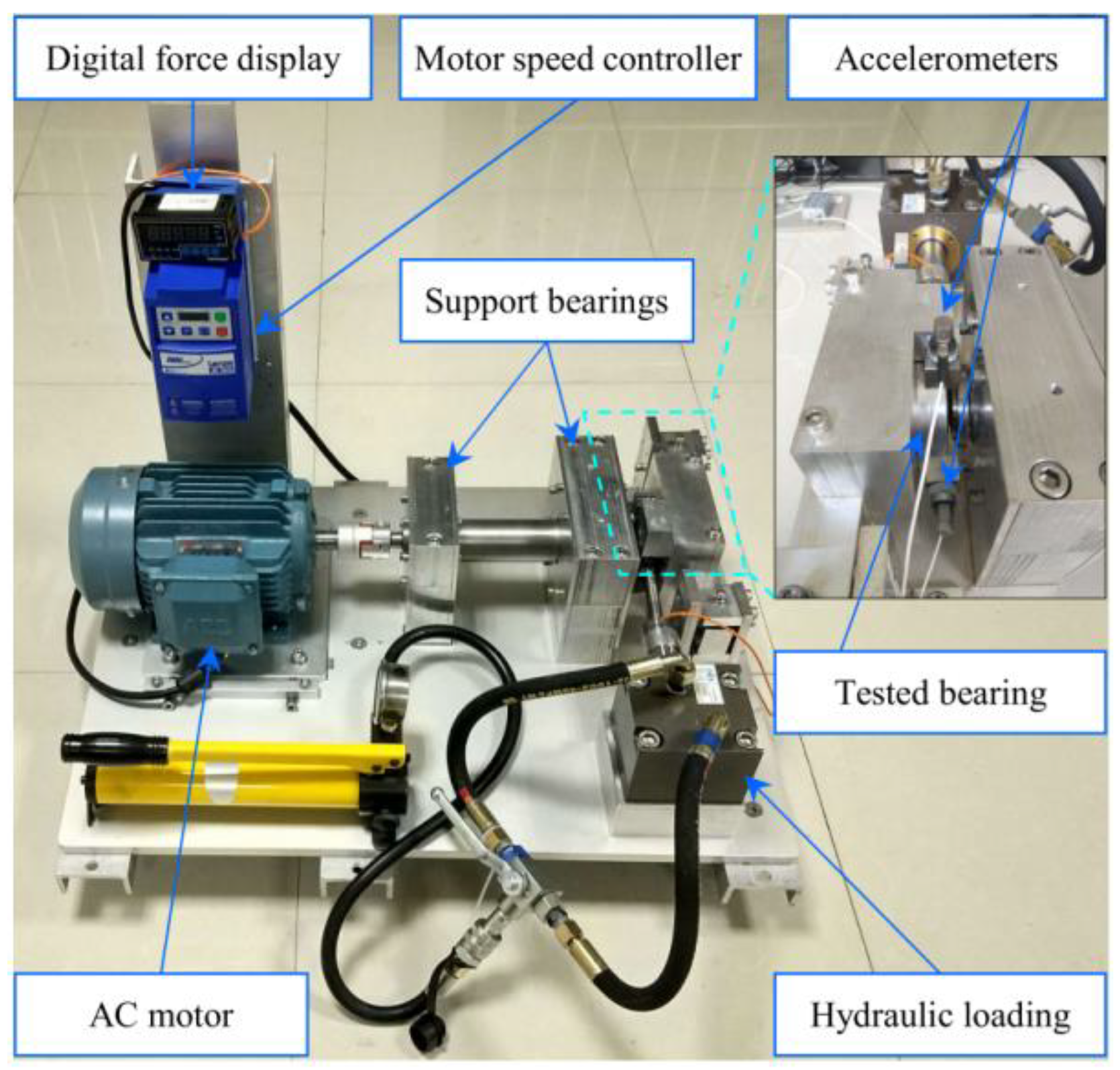
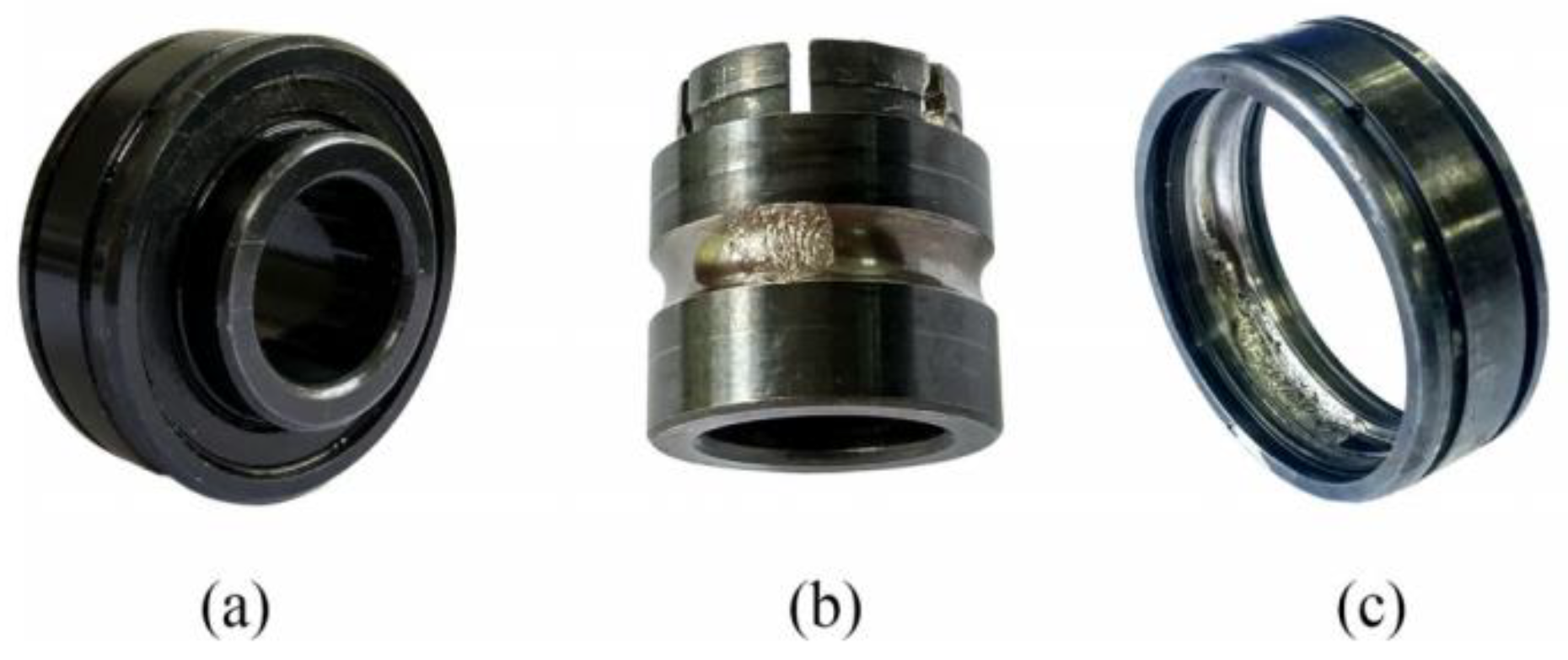
3. Bearing Fault Experimental Verification
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, W.; Kim, S.; Jeong, J.; Kim, H.; Lee, H.Y.; Youn, B.D. Digital twin approach for on-load tap changers using data-driven dynamic model updating and optimization-based operating condition estimation. Mech. Syst. Signal Process. 2022, 181, 109471. [Google Scholar] [CrossRef]
- Jerez, D.J.; Jensen, H.A.; Beer, M. An effective implementation of reliability methods for Bayesian model updating of structural dynamic models with multiple uncertain parameters. Reliab. Eng. Syst. Saf. 2022, 225, 108634. [Google Scholar]
- Liu, Y.; Jiang, H.; Liu, C.; Yang, W.; Sun, W. Data-augmented wavelet capsule generative adversarial network for rolling bearing fault diagnosis. Knowledge-Based Syst. 2022, 252, 109439. [Google Scholar] [CrossRef]
- Lei, Y.; Yang, B.; Jiang, X.; Jia, F.; Li, N.; Nandi, A.K. Applications of machine learning to machine fault diagnosis: A review and roadmap. Mech. Syst. Signal Process. 2020, 138, 106587. [Google Scholar] [CrossRef]
- Wang, Z.; Zhou, J.; Du, W.; Lei, Y.; Wang, J. Bearing fault diagnosis method based on adaptive maximum cyclostationarity blind deconvolution. Mech. Syst. Signal Process. 2022, 162, 108018. [Google Scholar] [CrossRef]
- Liang, M.; Zhou, K. Probabilistic bearing fault diagnosis using Gaussian process with tailored feature extraction. Int. J. Adv. Manuf. Technol. 2021, 119, 2059–2076. [Google Scholar] [CrossRef]
- Song, W.; Liu, H.; Zio, E. Long-range dependence and heavy tail characteristics for remaining useful life prediction in rolling bearing degradation. Appl. Math. Model. 2022, 102, 268–284. [Google Scholar] [CrossRef]
- Liu, H.; Song, W.; Zhang, Y.; Kudreyko, A. Generalized Cauchy Degradation Model With Long-Range Dependence and Maximum Lyapunov Exponent for Remaining Useful Life. IEEE Trans. Instrum. Meas. 2021, 70, 1–12. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Wang, J. A review of stochastic resonance in rotating machine fault detection. Mech. Syst. Signal Process. 2018, 116, 230–260. [Google Scholar] [CrossRef]
- Qiao, Z.; Lei, Y.; Li, N. Applications of stochastic resonance to machinery fault detection: A review and tutorial. Mech. Syst. Signal Process. 2019, 122, 502–536. [Google Scholar] [CrossRef]
- López, C.; Naranjo, A.; Lu, S.; Moore, K.J. Hidden Markov Model based Stochastic Resonance and its Application to Bearing Fault Diagnosis. J. Sound Vib. 2022, 528, 116890. [Google Scholar] [CrossRef]
- Lin, Y.; Xu, X.; Ye, C. Adaptive stochastic resonance quantified by a novel evaluation index for rotating machinery fault diagnosis. Measurement 2021, 184, 109920. [Google Scholar] [CrossRef]
- Li, Z.; Liu, X.; Wang, X.; He, T.; Shan, Y. A multi-parameter constrained potential underdamped stochastic resonance method and its application for weak fault diagnosis. J. Sound Vib. 2019, 459, 114862. [Google Scholar] [CrossRef]
- Lai, Z.H.; Liu, J.S.; Zhang, H.T.; Zhang, C.L.; Zhang, J.W.; Duan, D.Z. Multi-parameter-adjusting stochastic resonance in a standard tri-stable system and its application in incipient fault diagnosis. Nonlinear Dyn. 2019, 96, 2069–2085. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.; Liu, Z.; Wang, J. Weak feature enhancement in machinery fault diagnosis using empirical wavelet transform and an improved adaptive bistable stochastic resonance. ISA Trans. 2018, 84, 283–295. [Google Scholar] [CrossRef]
- Wang, Z.; Yang, J.; Guo, Y.; Gong, T.; Shan, Z. Positive role of bifurcation on stochastic resonance and its application in fault diagnosis under time-varying rotational speed. J. Sound Vib. 2022, 537, 117210. [Google Scholar] [CrossRef]
- Zhou, D.; Huang, D.; Hao, J.; Ren, Y.; Jiang, P.; Jia, X. Vibration-based fault diagnosis of the natural gas compressor using adaptive stochastic resonance realized by Generative Adversarial Networks. Eng. Fail. Analy. 2020, 116, 104759. [Google Scholar] [CrossRef]
- Shi, P.; Li, M.; Zhang, W.; Han, D. Weak signal enhancement for machinery fault diagnosis based on a novel adaptive multi-parameter unsaturated stochastic resonance. Appl. Acoust. 2022, 189, 108609. [Google Scholar] [CrossRef]
- Qiao, Z.; Elhattab, A.; Shu, X.; He, C. A second-order stochastic resonance method enhanced by fractional-order derivative for mechanical fault detection. Nonlinear Dyn. 2021, 106, 707–723. [Google Scholar] [CrossRef]
- Qiao, Z.; Liu, J.; Xu, X.; Yin, A.; Shu, X. Nonlinear resonance decomposition for weak signal detection. Rev. Sci. Instruments 2021, 92, 105102. [Google Scholar] [CrossRef]
- Qiao, Z.; Shu, X. Coupled neurons with multi-objective optimization benefit incipient fault identification of machinery. Chaos Solitons Fractals 2021, 145, 110813. [Google Scholar] [CrossRef]
- Li, J.; Li, M.; Zhang, J.; Jiang, G. Frequency-shift multiscale noise tuning stochastic resonance method for fault diagnosis of generator bearing in wind turbine. Measurement 2018, 133, 421–432. [Google Scholar] [CrossRef]
- Li, J.; Zhang, J.; Li, M.; Zhang, Y. A novel adaptive stochastic resonance method based on coupled bistable systems and its application in rolling bearing fault diagnosis. Mech. Syst. Signal Process. 2019, 114, 128–145. [Google Scholar] [CrossRef]
- Fu, Y.; Kang, Y.; Liu, R. Novel Bearing Fault Diagnosis Algorithm Based on the Method of Moments for Stochastic Resonant Systems. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- Xu, H.; Zhou, S.; Yang, T. Stochastic resonance of a high-order-degradation bistable system and its application in fault diagnosis with variable speed condition. Mech. Syst. Signal Process. 2023, 186. [Google Scholar] [CrossRef]
- Qiao, Z.; Chen, S.; Lai, Z.; Zhou, S.; Sanjuán, M.A.F. Harmonic-Gaussian double-well potential stochastic resonance with its application to enhance weak fault characteristics of machinery. Nonlinear Dyn. 2023, 1–15. [Google Scholar] [CrossRef]
- Dong, H.; Wang, H.; Shen, X.; Jiang, Z. Effects of Second-Order Matched Stochastic Resonance for Weak Signal Detection. IEEE Access 2018, 6, 46505–46515. [Google Scholar] [CrossRef]
- Gammaitoni, L.; Hänggi, P.; Jung, P.; Marchesoni, F. Stochastic resonance. Rev. Mod. Phy. 1998, 70, 223. [Google Scholar] [CrossRef]
- Li, F.; Duan, F.; Chapeau-Blondeau, F.; Abbott, D. Signal estimation and filtering from quantized observations via adaptive stochastic resonance. Phys. Rev. E 2021, 103(5), 052108. [Google Scholar] [CrossRef]
- Dong, H.; Wang, H.; Shen, X.; He, K. Parameter matched stochastic resonance with damping for passive sonar detection. J. Sound Vib. 2019, 458, 479–496. [Google Scholar] [CrossRef]
- Lu, S.; He, Q.; Kong, F. Effects of underdamped step-varying second-order stochastic resonance for weak signal detection. Digit. Signal Process. 2015, 36, 93–103. [Google Scholar] [CrossRef]
- Kay, S.M. Fundamentals of statistical signal processing: Estimation theory; Prentice-Hall, Inc.: New York, NY, USA, 1993; pp. 65–75. [Google Scholar]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A Hybrid Prognostics Approach for Estimating Remaining Useful Life of Rolling Element Bearings. IEEE Trans. Reliab. 2018, 69, 401–412. [Google Scholar] [CrossRef]
- Antoni, J. Fast computation of the kurtogram for the detection of transient faults. Mech. Syst. Signal Process. 2007, 21, 108–124. [Google Scholar] [CrossRef]
- Lei, Y.; Lin, J.; He, Z.; Zi, Y. Application of an improved kurtogram method for fault diagnosis of rolling element bearings. Mech. Syst. Signal Process. 2011, 25, 1738–1749. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Parameters | Values |
|---|---|---|---|
| Outer race diameter | 39.80 mm | Inner race diameter | 29.30 mm |
| Mean diameter | 34.55 mm | Ball diameter | 7.92 mm |
| Number of balls | 8 | Contact angle | 0° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, M.; Zheng, C.; Sun, K.; Xu, L.; Qiao, Z.; Lai, Z. Stochastic Resonance with Parameter Estimation for Enhancing Unknown Compound Fault Detection of Bearings. Sensors 2023, 23, 3860. https://doi.org/10.3390/s23083860
Xu M, Zheng C, Sun K, Xu L, Qiao Z, Lai Z. Stochastic Resonance with Parameter Estimation for Enhancing Unknown Compound Fault Detection of Bearings. Sensors. 2023; 23(8):3860. https://doi.org/10.3390/s23083860
Chicago/Turabian StyleXu, Min, Chao Zheng, Kelei Sun, Li Xu, Zijian Qiao, and Zhihui Lai. 2023. "Stochastic Resonance with Parameter Estimation for Enhancing Unknown Compound Fault Detection of Bearings" Sensors 23, no. 8: 3860. https://doi.org/10.3390/s23083860
APA StyleXu, M., Zheng, C., Sun, K., Xu, L., Qiao, Z., & Lai, Z. (2023). Stochastic Resonance with Parameter Estimation for Enhancing Unknown Compound Fault Detection of Bearings. Sensors, 23(8), 3860. https://doi.org/10.3390/s23083860