
RIS-Assisted Hybrid Beamforming and Connected User Vehicle Localization for Millimeter Wave MIMO Systems



Abstract
1. Introduction
- Due to blockage awareness, we first develop an RIS-assisted V2V MIMO channel model and demonstrate the geometrical relation between the RIS controller and user vehicle position. By using the distance between the transmitting and receiving vehicle in relation to the distance of an RIS controller, we estimate the path amplitude and phase.
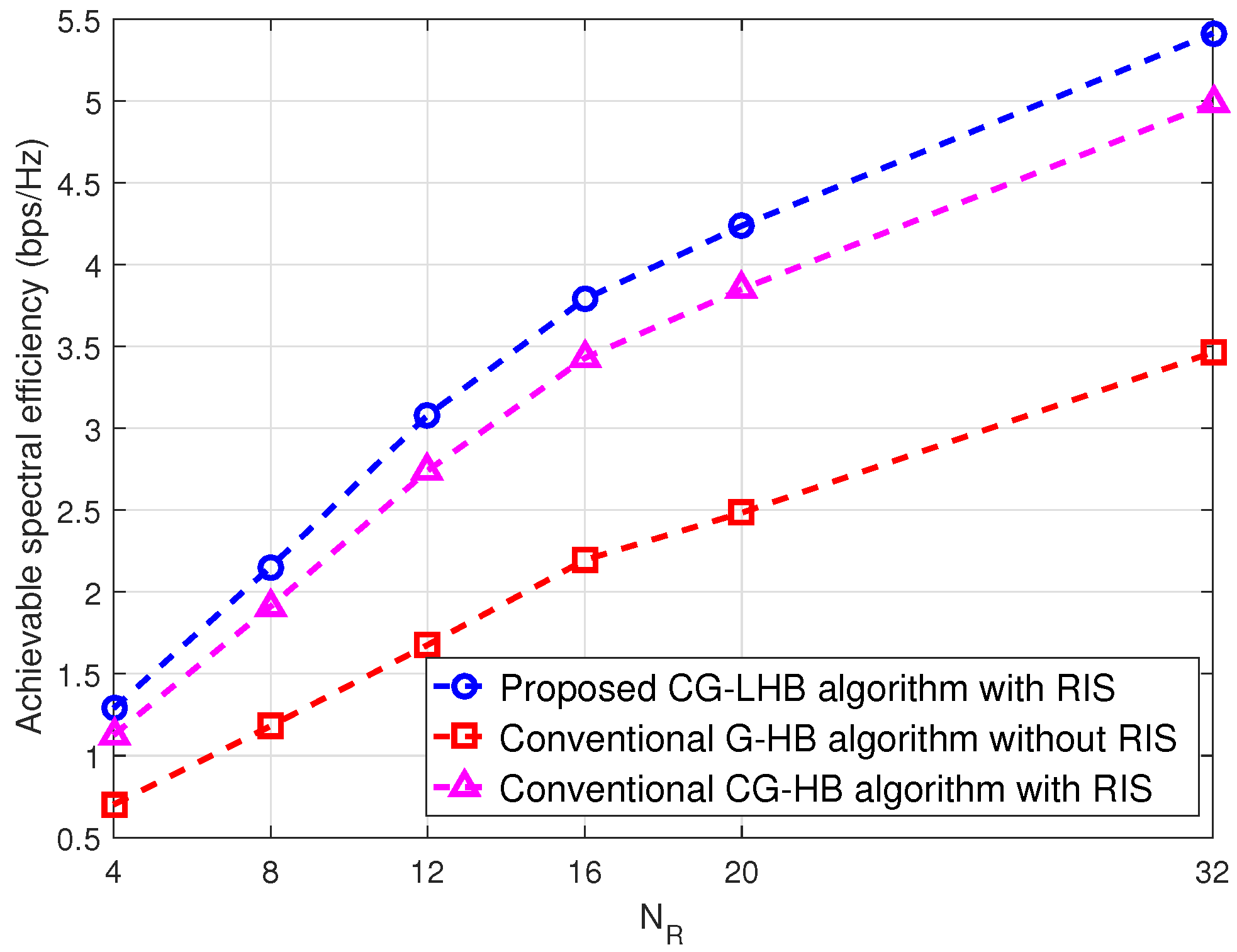
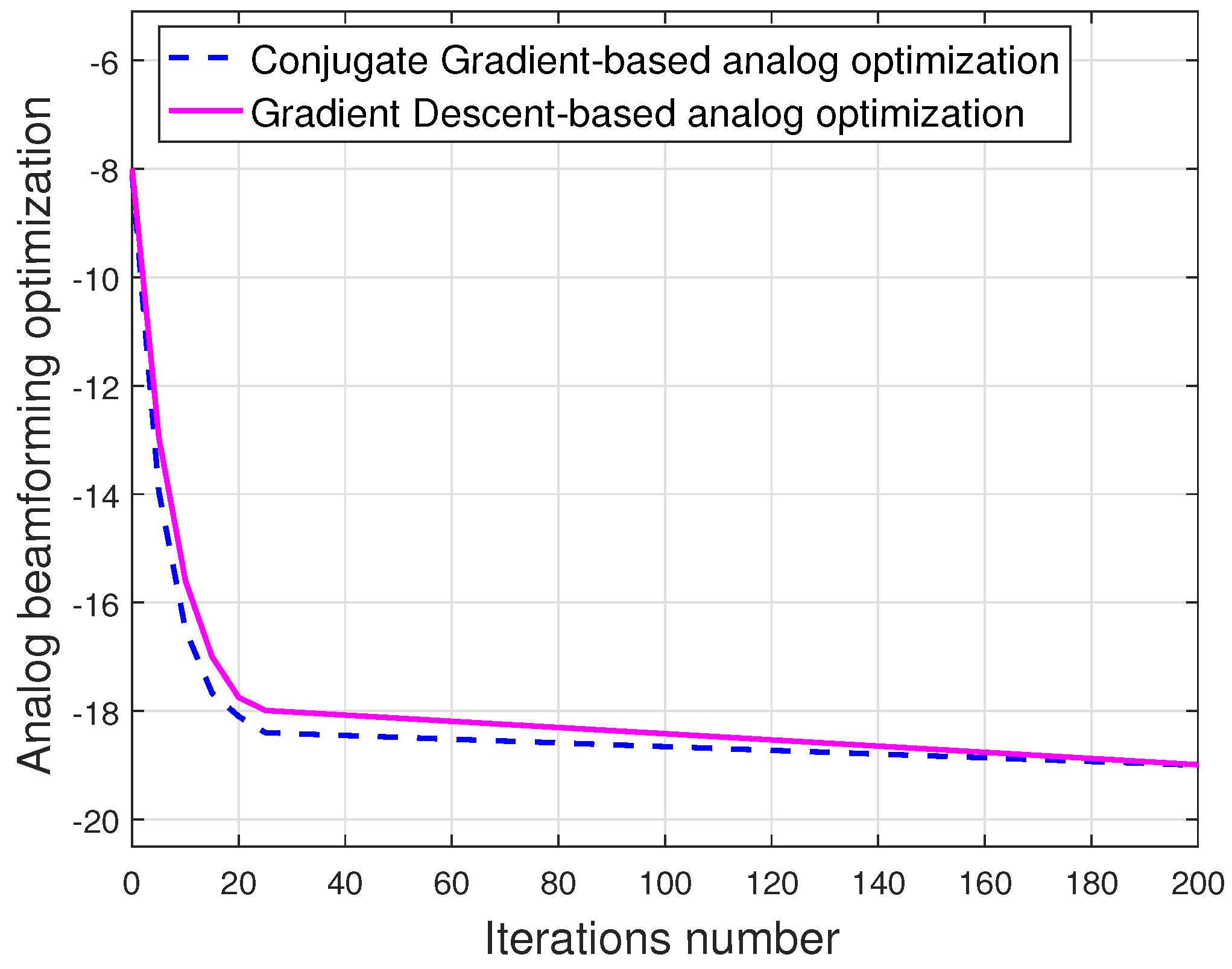
- We then design an RIS-assisted low-dimensional equivalent effective channel. In response to a sub-design problem of an original beamformer, we propose a conjugate gradient and location-based hybrid beamforming algorithm. We apply a Karush-Kuhn-Tucker condition and a Lagrangian method to solve an original problem into a sub-optimal problem for developing the conventional hybrid beamforming algorithm, which reduces the user sub-rate maximization problem. The proposed algorithm attains significant spectral efficiency performance.
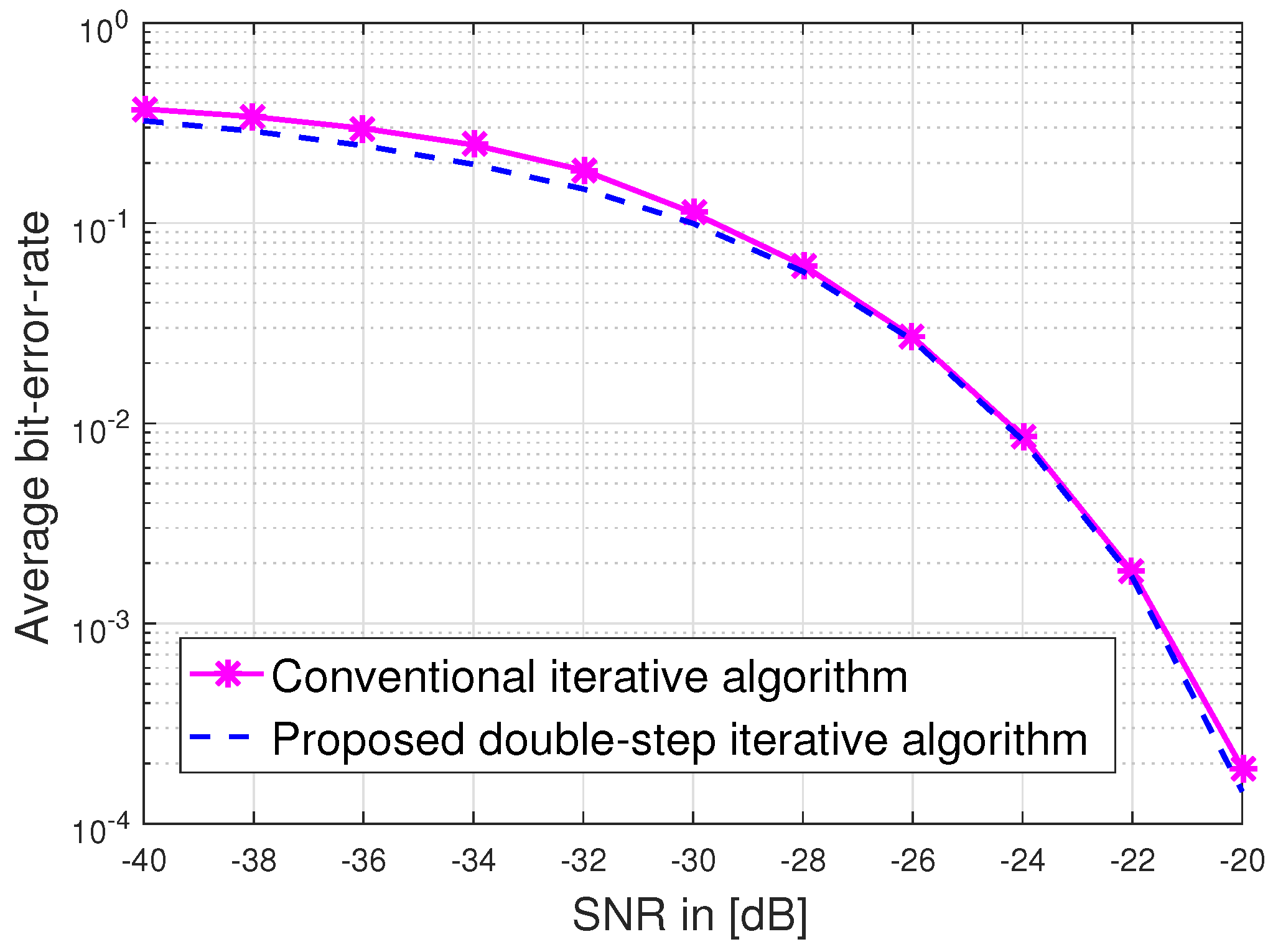
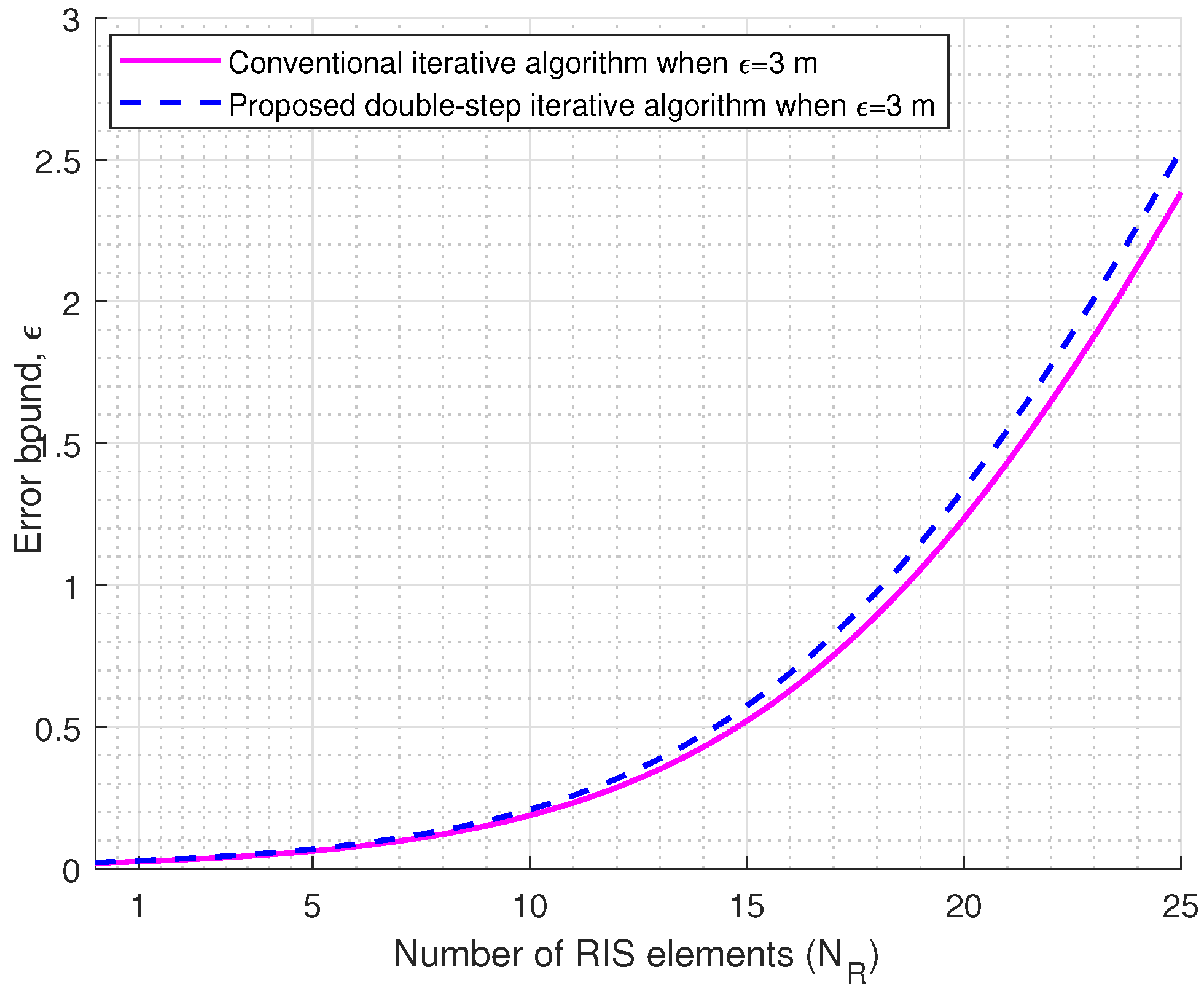
- We next consider a covariance splitting method to reform the error covariance matrix. Since the channel is geometrically contained in location information, we propose a double-step iterative algorithm that minimizes the effect of location error in user vehicles. Finally, the simulation results demonstrate the superiority of the proposed algorithms over their counterparts.
2. Signal and Channel Model
2.1. Signal Model
2.2. Channel Model
2.3. Geometrical Relation between the RIS Controller and the Connected Vehicle Position
3. Proposed CG-LHB Algorithm and User Vehicle Localization
3.1. Proposed CG-LHB Algorithm
| Algorithm 1 Proposed CG-LHB Algorithm |
|
3.2. User Vehicle Localization
| Algorithm 2 Proposed Double-Step Iterative Algorithm for User Vehicle Localization |
|
4. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter-Wave Cellular Wireless Networks: Potentials and Challenges. Proc. IEEE 2014, 102, 366–385. [Google Scholar] [CrossRef]
- Alkhateeb, A.; Ayach, O.; Leus, G.; Heath, R.W. Channel Estimation and Hybrid Precoding for Millimeter Wave Cellular Systems. IEEE J. Sel. Top. Signal Process. 2014, 8, 831–846. [Google Scholar] [CrossRef]
- Mo, J.; Alkhateeb, A.; Abu-Surra, S.; Heath, R.W. Hybrid Architectures with Few-Bit ADC Receivers: Achievable Rates and Energy-Rate Tradeoffs. IEEE Trans. Wirel. Commun. 2017, 16, 2274–2287. [Google Scholar] [CrossRef]
- Choi, J.; Lee, G.; Alkhateeb, A.; Gatherer, A.; Al-Dhahir, N.; Evans, B.L. Advanced Receiver Architectures for Millimeter-Wave Communications with Low-Resolution ADCs. IEEE Commun. Mag. 2020, 58, 42–48. [Google Scholar] [CrossRef]
- Sarker, M.A.L.; Kader, M.F.; Han, D.S. Rate-Loss Mitigation for a Millimeter-Wave Beamspace MIMO Lens Antenna Array System Using a Hybrid Beam Selection Scheme. IEEE Syst. J. 2020, 14, 3582–3585. [Google Scholar] [CrossRef]
- Chen, Y.; Wang, Y.; Zhang, J.; Renzo, M.D. QoS-Driven Spectrum Sharing for Reconfigurable Intelligent Surfaces (RISs) Aided Vehicular Networks. IEEE Trans. Wirel. Commun. 2021, 20, 5969–5985. [Google Scholar] [CrossRef]
- Jiang, Z.; Rihan, M.; Zhang, P.; Huang, L.; Zhang, J.; Mohamed, E.M. Intelligent Reflecting Surface Aided Dual-Function Radar and Communication System. IEEE Syst. J. 2022, 16, 475–486. [Google Scholar] [CrossRef]
- Li, J.; Huang, Y.; Chen, P.; Qi, X.; Wen, M.; Arslan, H. Composite Multiple-Mode Orthogonal Frequency Division Multiplexing with Index Modulation. IEEE Trans. Wirel. Commun. 2022. Early Access. [Google Scholar] [CrossRef]
- Li, J.; Dang, S.; Yan, Y.; Peng, Y.; Al-Rubaye, S.; Tsourdos, A. Generalized Quadrature Spatial Modulation and its Application to Vehicular Networks with NOMA. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4030–4039. [Google Scholar] [CrossRef]
- Gao, Y.; Liu, X.; Li, J.; Fang, Z.; Jiang, X.; Huq, K.M.S. LFT-Net: Local Feature Transformer Network for Point Clouds Analysis. IEEE Trans. Intell. Transp. Syst. 2022, 24, 2158–2168. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; de Cola, T.; Wang, J.B.; Zhu, W.P.; Cheng, J. Supporting IoT with Rate-Splitting Multiple Access in Satellite and Aerial-Integrated Networks. IEEE Internet Things J. 2021, 8, 11123–11134. [Google Scholar] [CrossRef]
- Lin, Z.; Lin, M.; Wang, J.B.; de Cola, T.; Wang, J. Joint Beamforming and Power Allocation for Satellite-Terrestrial Integrated Networks with Non-Orthogonal Multiple Access. IEEE J. Sel. Top. Signal Process. 2019, 13, 657–670. [Google Scholar] [CrossRef]
- Spoof, K.; Tenhunen, M.; Unnikrishnan, V.; Stadius, K.; Kosunen, M.; Ryynänen, J. True-Time-Delay Receiver IC with Reconfigurable Analog and Digital Beamforming. IEEE Access 2022, 10, 116375–116383. [Google Scholar] [CrossRef]
- Yu, H.; Tuan, H.D.; Dutkiewicz, E.; Poor, H.V.; Hanzo, L. RIS-Aided Zero-Forcing and Regularized Zero-Forcing Beamforming in Integrated Information and Energy Delivery. IEEE Trans. Wirel. Commun. 2022, 21, 5500–5513. [Google Scholar] [CrossRef]
- Pang, X.; Zhao, N.; Tang, J.; Wu, C.; Niyato, D.; Wong, K. IRS-Assisted Secure UAV Transmission via Joint Trajectory and Beamforming Design. IEEE Trans. Commun. 2022, 70, 1140–1152. [Google Scholar] [CrossRef]
- Alrabeiah, M.; Zhang, Y.; Alkhateeb, A. Neural Networks Based Beam Codebooks: Learning mmWave Massive MIMO Beams That Adapt to Deployment and Hardware. IEEE Trans. Commun. 2022, 70, 3818–3833. [Google Scholar] [CrossRef]
- Ni, P.; Liu, R.; Li, M.; Liu, Q. User Association and Hybrid Beamforming Designs for Cooperative mmWave MIMO Systems. IEEE Trans. Signal Inf. Process. Netw. 2022, 8, 641–654. [Google Scholar] [CrossRef]
- Xiu, Y.; Zhao, J.; Sun, W.; Renzo, M.D.; Gui, G.; Zhang, Z.; Wei, N. Reconfigurable Intelligent Surfaces Aided mmWave NOMA: Joint Power Allocation, Phase Shifts, and Hybrid Beamforming Optimization. IEEE Trans. Wirel. Commun. 2021, 20, 8393–8409. [Google Scholar] [CrossRef]
- Ying, K.; Gao, Z.; Lyu, S.; Wu, Y.; Wang, H.; Alouini, M. GMD-Based Hybrid Beamforming for Large Reconfigurable Intelligent Surface Assisted Millimeter-Wave Massive MIMO. IEEE Access 2020, 8, 19530–19539. [Google Scholar] [CrossRef]
- Fu, S.; Zhang, W.; Jiang, Z. A network-level connected autonomous driving evaluation platform implementing C-V2X technology. China Commun. 2021, 18, 77–88. [Google Scholar] [CrossRef]
- Technical Specification Group Service and System Aspects: Enhancement of 3GPP Support for V2X Scenarios; (Release 16); Document TS 22.186, V16.2.0, V14.0.0; ETSI: Sophia Antipolis, France, 2019.
- Raghavan, V.; Akhoondzadeh-Asl, L.; Podshivalov, V.; Hulten, J.; Tassoudji, M.; Koymen, O.; Sampath, A.; Li, J. Statistical Blockage Modeling and Robustness of Beamforming in Millimeter-Wave Systems. IEEE Trans. Microw. Theory Tech. 2019, 67, 3010–3024. [Google Scholar] [CrossRef]
- Renzo, M.D.; Zappone, A.; Debbah, M.; Alouini, A.; Yuen, C.; Rosny, J.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How It Works, State of Research, and the Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Wymeersch, H.; He, J.; Denis, B.; Clemente, A.; Juntti, M. Radio Localization and Mapping with Reconfigurable Intelligent Surfaces: Challenges, Opportunities, and Research Directions. IEEE Veh. Technol. Mag. 2020, 15, 52–61. [Google Scholar] [CrossRef]
- Huang, C.; Zappone, A.; Alexandropoulos, G.C.; Debbah, M.; Yuen, C. Reconfigurable Intelligent Surfaces for Energy Efficiency in Wireless Communication. IEEE Trans. Wirel. Commun. 2019, 18, 4157–4170. [Google Scholar] [CrossRef]
- Renzo, M.D.; Ntontin, K.; Song, J.; Danufane, F. Reconfigurable Intelligent Surfaces vs. Relaying: Differences, Similarities, and Performance Comparison. IEEE Open J. Commun. Soc. 2020, 1, 798–807. [Google Scholar] [CrossRef]
- Özdogan, Ö.; Björnson, E.; Larsson, E.G. Intelligent Reflecting Surfaces: Physics, Propagation, and Pathloss Modeling. IEEE Wirel. Commun. Lett. 2020, 9, 581–585. [Google Scholar] [CrossRef]
- Wei, L.; Huang, C.; Alexandropoulos, G.C.; Yuen, C.; Zhang, Z.; Debbah, M. Channel Estimation for RIS-Empowered Multi-User MISO Wireless Communications. IEEE Trans. Commun. 2021, 69, 4144–4157. [Google Scholar] [CrossRef]
- He, J.; Wymeersch, H.; Juntti, M. Channel Estimation for RIS-Aided mmWave MIMO Systems via Atomic Norm Minimization. IEEE Trans. Wirel. Commun. 2021, 20, 5786–5797. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Dai, L.; Li, H. Joint Transceiver and Large Intelligent Surface Design for Massive MIMO mmWave Systems. IEEE Trans. Wirel. Commun. 2021, 20, 1052–1064. [Google Scholar] [CrossRef]
- Ozcan, Y.U.; Ozdemir, O.; Kurt, G.K. Reconfigurable Intelligent Surfaces for the Connectivity of Autonomous Vehicles. IEEE Trans. Veh. Technol. 2021, 70, 2508–2513. [Google Scholar] [CrossRef]
- Ren, H.; Wang, K.; Pan, C. Intelligent Reflecting Surface-Aided URLLC in a Factory Automation Scenario. IEEE Trans. Commun. 2022, 70, 707–723. [Google Scholar] [CrossRef]
- Yildirim, I.; Uyrus, A.; Basar, E. Modeling and Analysis of Reconfigurable Intelligent Surfaces for Indoor and Outdoor Applications in Future Wireless Networks. IEEE Trans. Commun. 2021, 69, 1290–1301. [Google Scholar] [CrossRef]
- Sun, Y.; Wang, C.; Huang, J.; Wang, J. A 3D Non-Stationary Channel Model for 6G Wireless Systems Employing Intelligent Reflecting Surfaces with Practical Phase Shifts. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 496–510. [Google Scholar] [CrossRef]
- Pan, C.; Zhi, K.; Hong, S.; Wu, T.; Pan, Y.; Ren, H.; Renzo, M.D.; Swindlehurst, A.; Zhang, R.; Zhang, A. An Overview of Signal Processing Techniques for RIS/IRS-Aided Wireless Systems. IEEE J. Sel. Top. Signal Process. 2022, 16, 883–917. [Google Scholar] [CrossRef]
- Mei, W.; Zheng, B.; You, C.; Zhang, R. Intelligent Reflecting Surface-Aided Wireless Networks: From Single-Reflection to Multireflection Design and Optimization. Proc. IEEE 2022, 110, 1380–1400. [Google Scholar] [CrossRef]
- Li, Z.; Hua, M.; Wang, Q.; Song, Q. Weighted Sum-Rate Maximization for Multi-IRS Aided Cooperative Transmission. IEEE Wirel. Commun. Lett. 2020, 9, 1620–1624. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J.; Xie, W.; Hasna, M.O.; Tsiftsis, T.; Renzo, M.D. Secrecy Performance Analysis of RIS-Aided Wireless Communication Systems. IEEE Trans. Veh. Technol. 2020, 69, 12296–12300. [Google Scholar] [CrossRef]
- Shen, H.; Xu, W.; Gong, S.; Zhao, C.; Ng, D.W.K. Beamforming Optimization for IRS-Aided Communications with Transceiver Hardware Impairments. IEEE Trans. Commun. 2021, 69, 1214–1227. [Google Scholar] [CrossRef]
- Niu, H.; Lin, Z.; Zhu, Z.; Xiao, P.; Nguyen, H.; Lee, I.; Al-Dhahir, N. Joint Beamforming Design for Secure RIS-Assisted IoT Networks. IEEE Internet Things J. 2023, 10, 1628–1641. [Google Scholar] [CrossRef]
- Ayach, O.E.; Rajagopal, S.; Abu-Surra, S.; Pi, Z.; Heath, R.W. Spatially Sparse Precoding in Millimeter Wave MIMO Systems. IEEE Trans. Wirel. Commun. 2014, 13, 1499–1513. [Google Scholar] [CrossRef]
- Bai, Z.; Golub, G.H.; Ng, M.K. On inexact hermitian and skew-Hermitian splitting methods for non-Hermitian positive definite linear systems. Linear Algebra Its Appl. 2008, 428, 413–440. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Sun, Y.; An, K.; Luo, J.; Zhu, Y.; Zheng, G.; Chatzinotas, S. Outage Constrained Robust Beamforming Optimization for Multiuser IRS-Assisted Anti-Jamming Communications with Incomplete Information. IEEE Internet Things J. 2022, 9, 13298–13314. [Google Scholar] [CrossRef]
- Tang, L.; Zhu, Y.; Wu, H.; Fu, Q. Fast algorithms for sparse frequency waveform design with sidelobe constraint. Digit. Signal Process. 2017, 69, 140–153. [Google Scholar] [CrossRef]
- Sohrabi, F.; Yu, W. Hybrid Digital and Analog Beamforming Design for Large-Scale Antenna Arrays. IEEE J. Sel. Top. Signal Process. 2016, 10, 501–513. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total number of transmit vehicle antennas | |
| Total number of user vehicle antenna | |
| Total number of RIS discrete elements | |
| Total number of RF chains | |
| Total number of data streams | |
| The number of propagation path | 1 |
| Wavelength | cm |
| Light speed | m/s |
| RIS elements distance | cm |
| Carrier frequency | GHz |
| RIS dimensions | |
| Noise PSD | dBm/Hz |
| Noise variance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sarker, M.A.L.; Son, W.; Han, D.S. RIS-Assisted Hybrid Beamforming and Connected User Vehicle Localization for Millimeter Wave MIMO Systems. Sensors 2023, 23, 3713. https://doi.org/10.3390/s23073713
Sarker MAL, Son W, Han DS. RIS-Assisted Hybrid Beamforming and Connected User Vehicle Localization for Millimeter Wave MIMO Systems. Sensors. 2023; 23(7):3713. https://doi.org/10.3390/s23073713
Chicago/Turabian StyleSarker, Md. Abdul Latif, Woosung Son, and Dong Seog Han. 2023. "RIS-Assisted Hybrid Beamforming and Connected User Vehicle Localization for Millimeter Wave MIMO Systems" Sensors 23, no. 7: 3713. https://doi.org/10.3390/s23073713
APA StyleSarker, M. A. L., Son, W., & Han, D. S. (2023). RIS-Assisted Hybrid Beamforming and Connected User Vehicle Localization for Millimeter Wave MIMO Systems. Sensors, 23(7), 3713. https://doi.org/10.3390/s23073713