

A Feasibility Study on Monitoring Earthquake-Caused Furniture Vibrations Using Radiofrequency Identification Sensor Tags

Abstract
1. Introduction
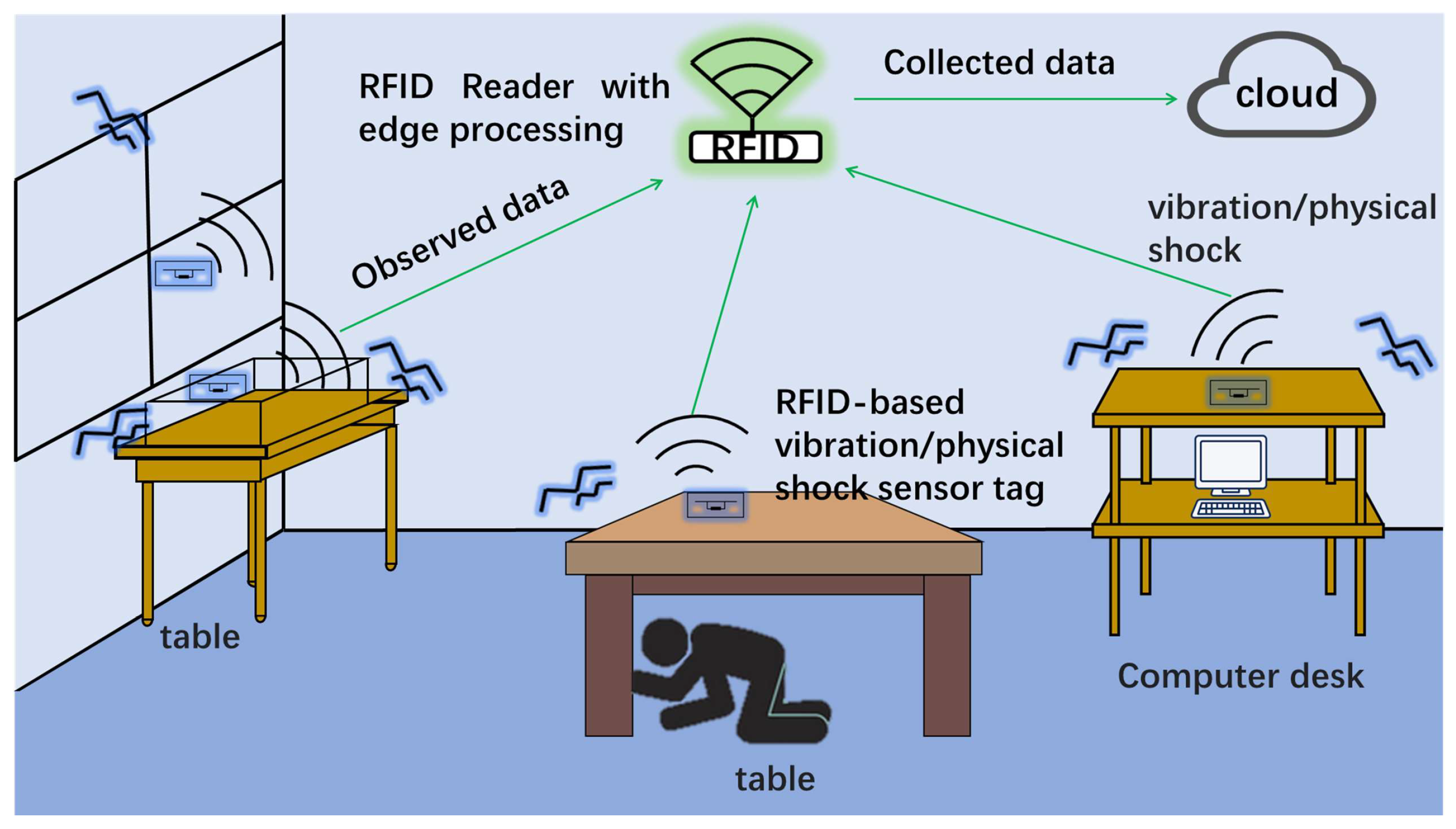
2. RFID-Based Vibration/Physical-Shock Sensor System for Long-Term Measurements
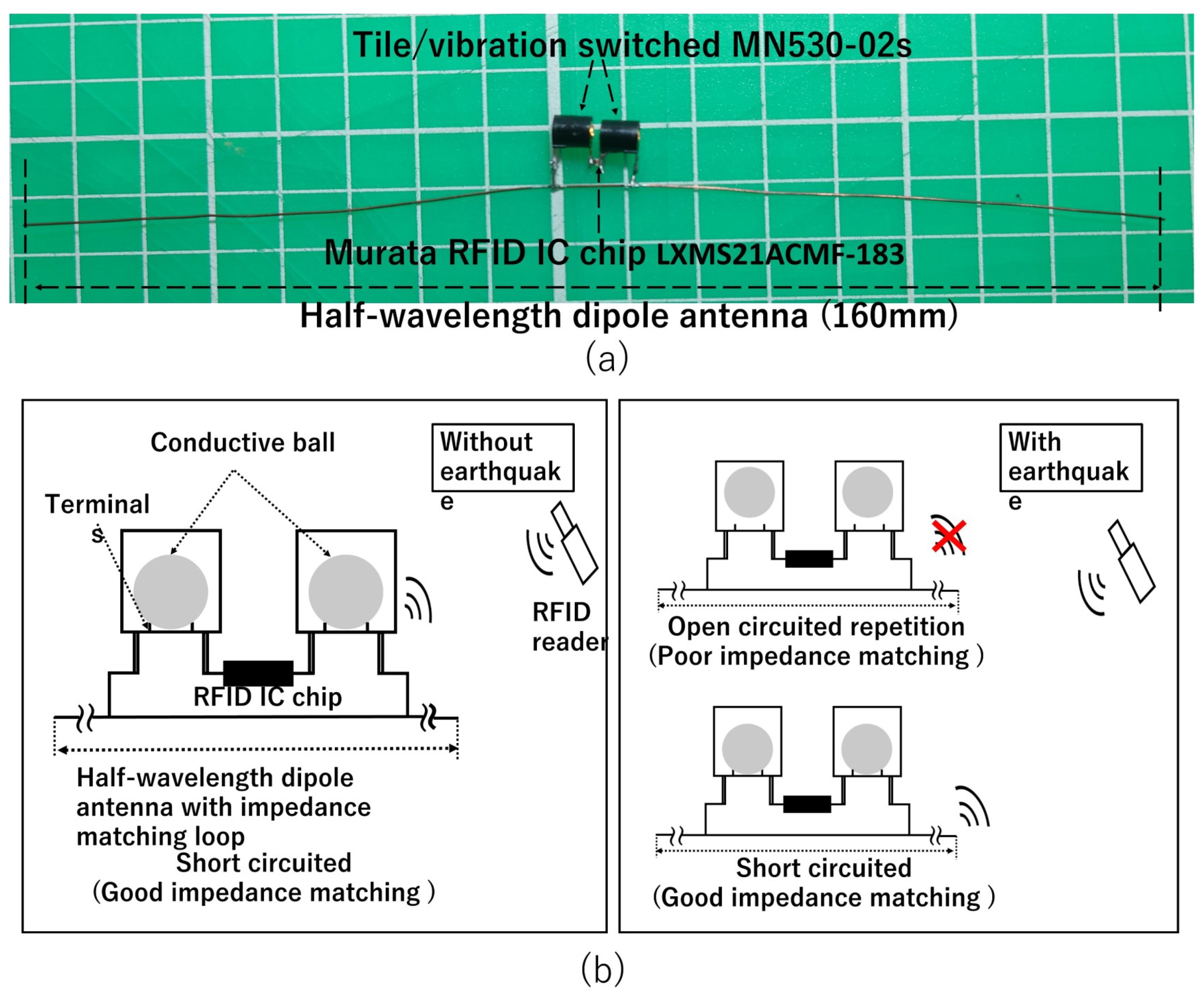
2.1. RFID-Based Vibration/Physical-Shock Sensor Tag
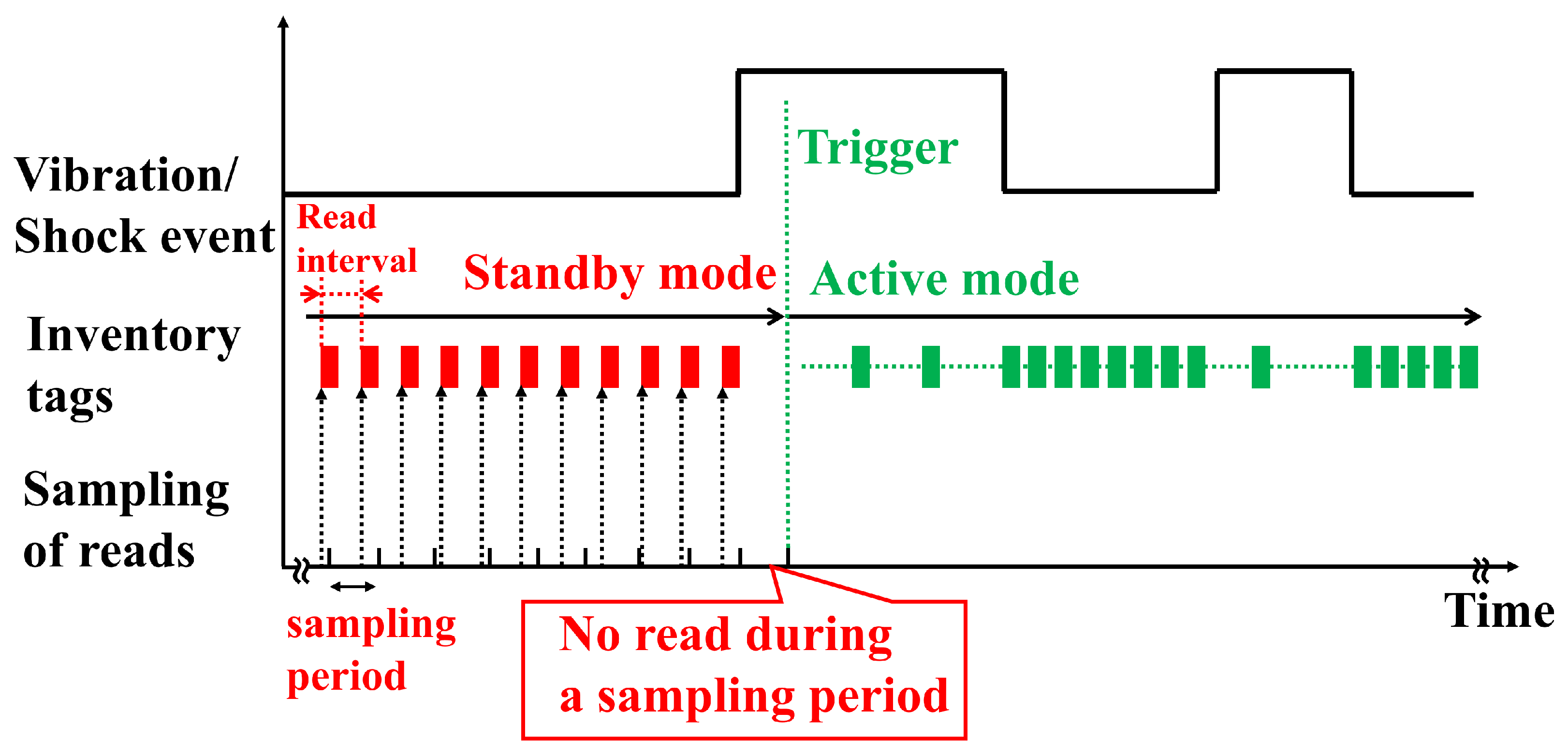
2.2. Measurement Principle for Long-Term Monitoring
3. Experiment
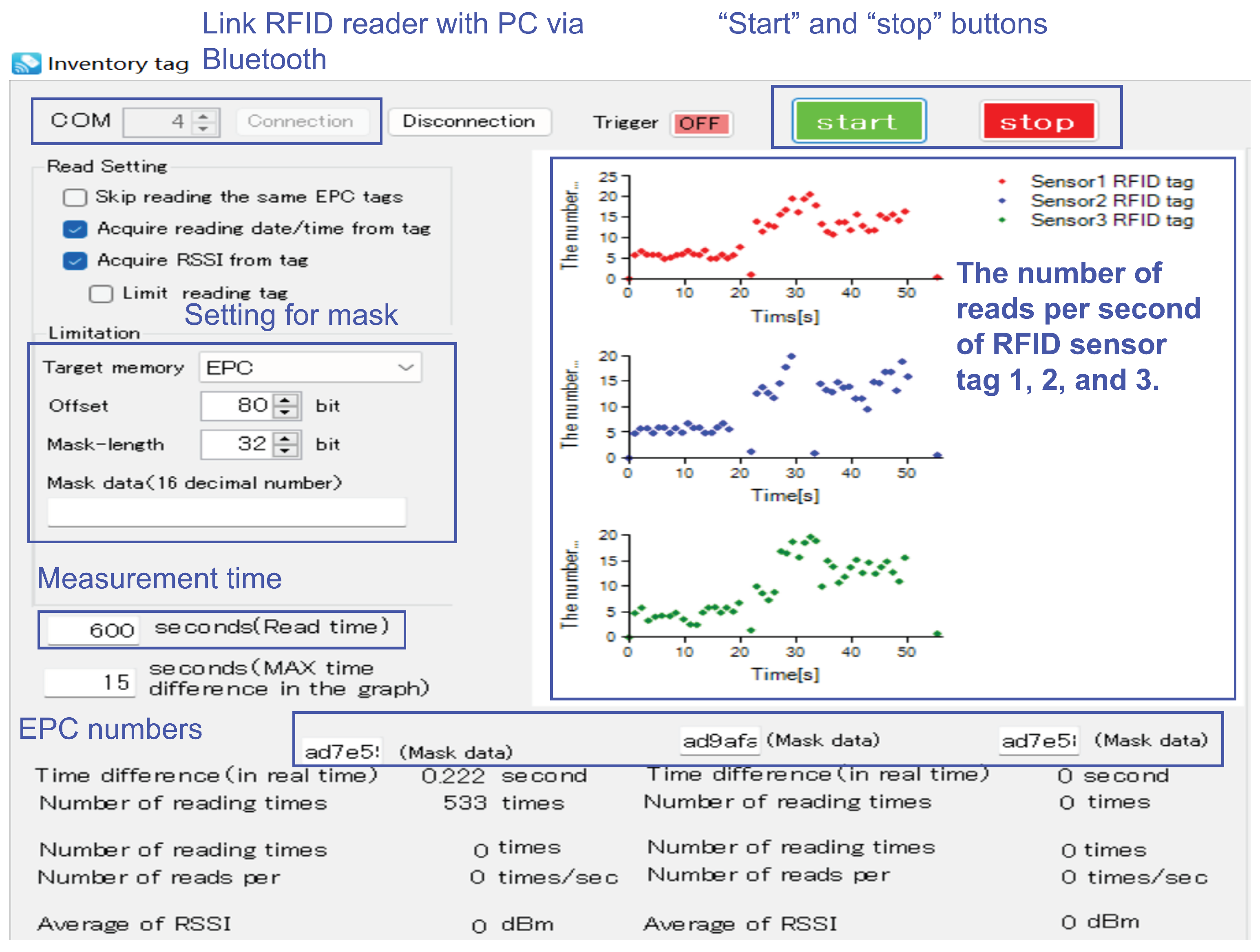
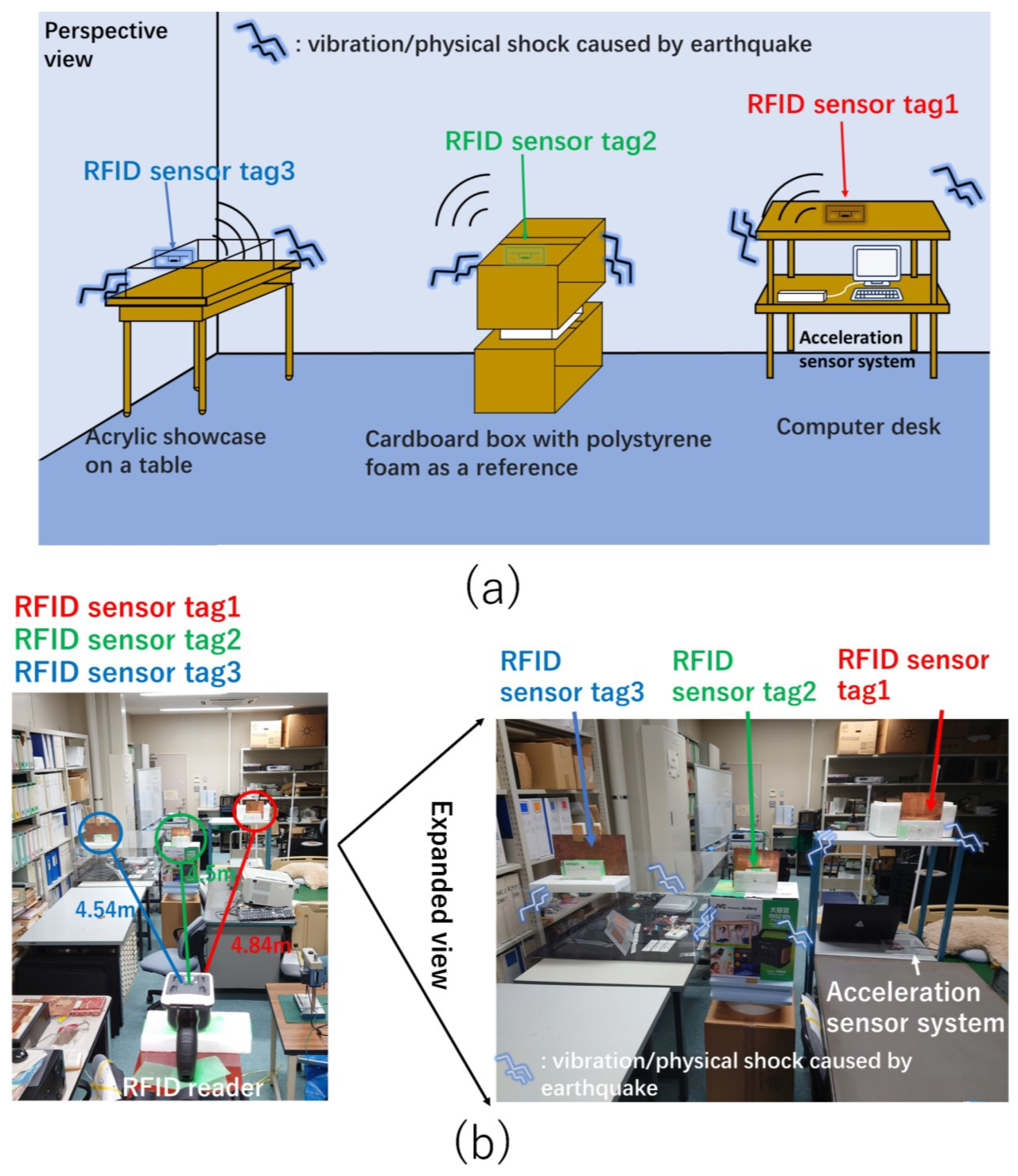
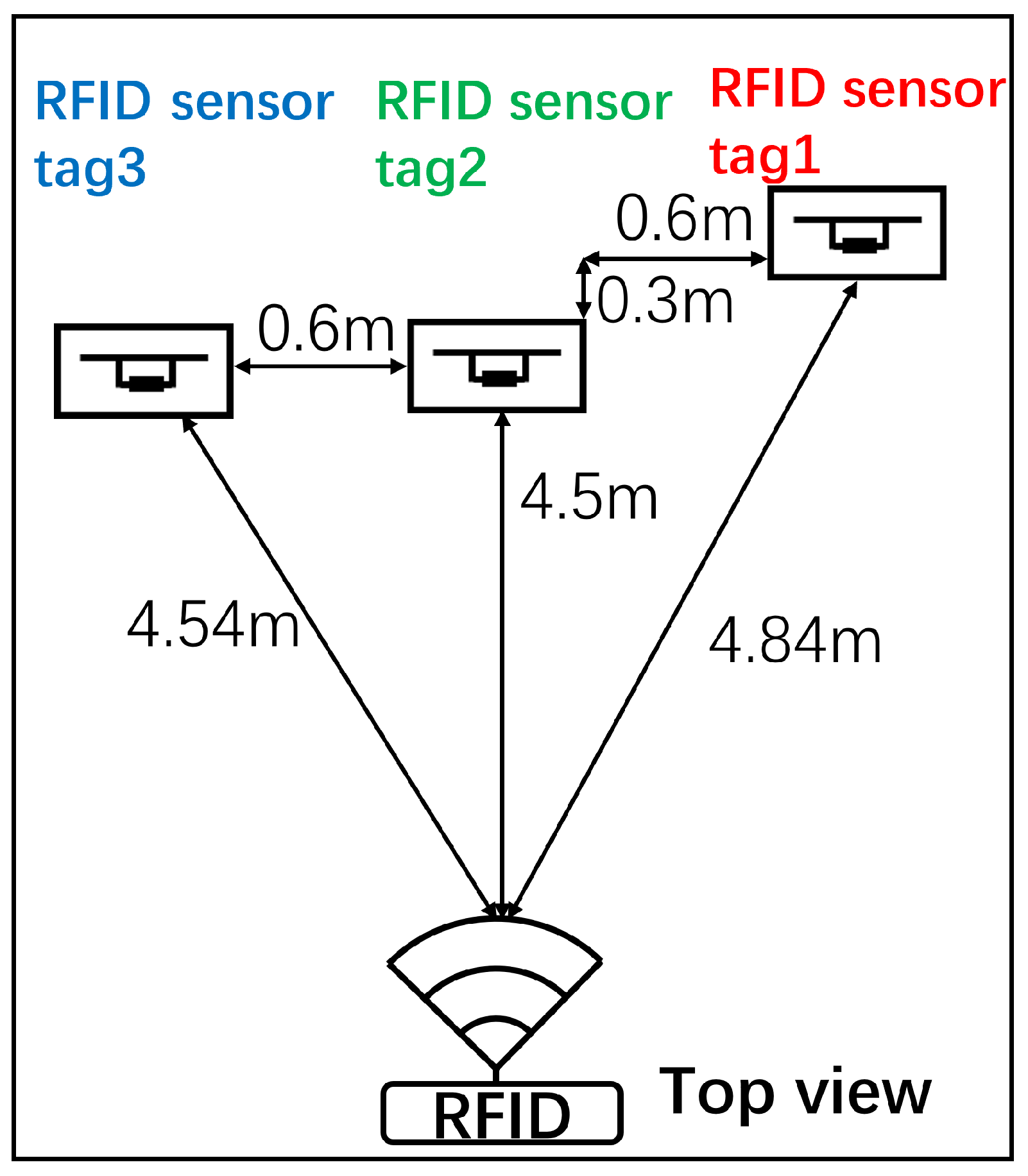
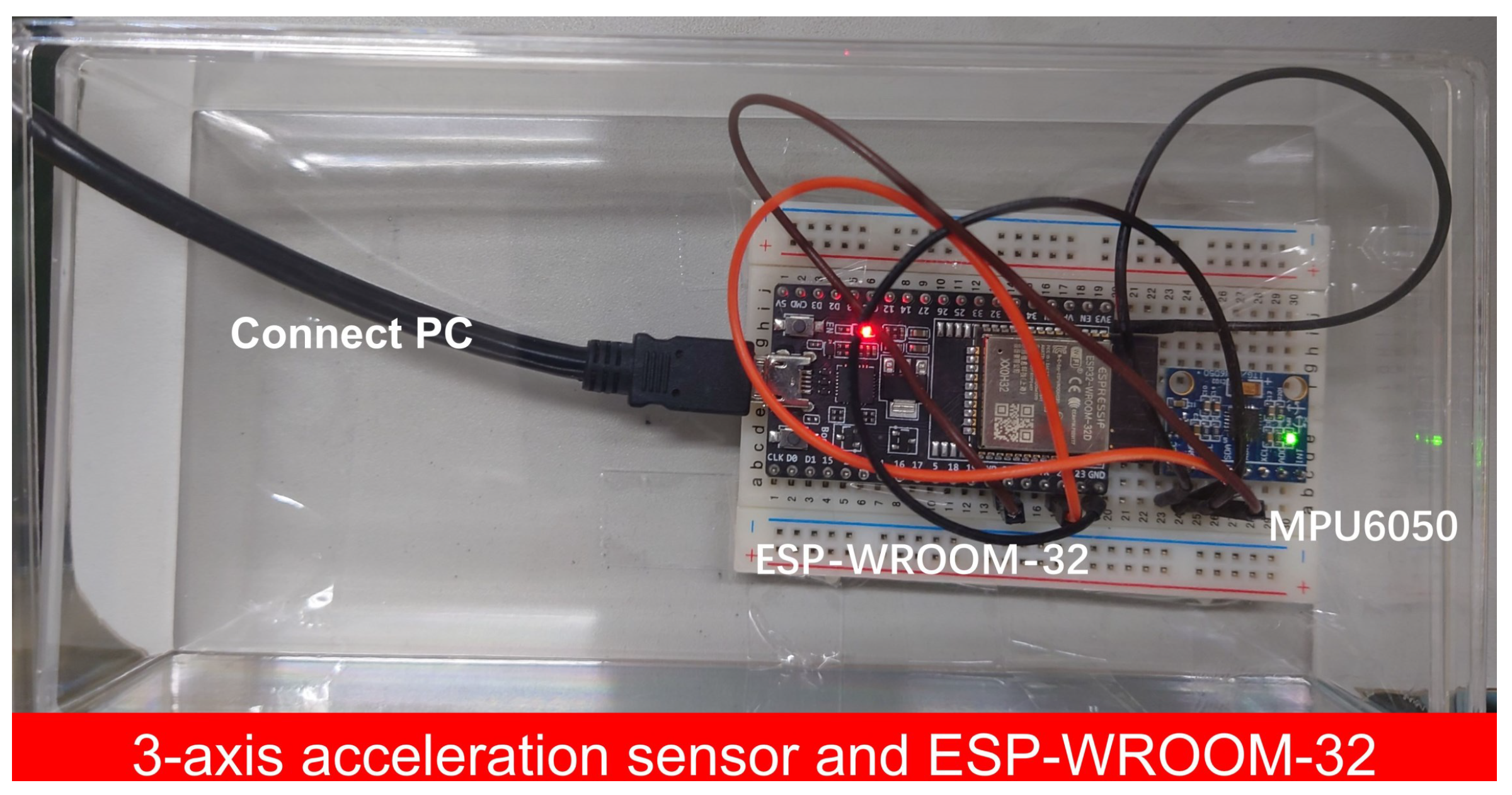
3.1. Software and Experiment Environment
3.2. Observation Results
4. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Global Disaster Assessment Report. 2021. Available online: https://www.preventionweb.net/publication/2021-global-disaster-assessment-report (accessed on 11 November 2022).
- Disaster Prevention. Available online: https://www.mlit.go.jp/road/road_e/p5_disaster.html (accessed on 11 November 2022).
- Wu, Y.-M.; Mittal, H. A Review on the Development of Earthquake Warning System Using Low-Cost Sensors in Taiwan. Sensors 2021, 21, 7649. [Google Scholar] [CrossRef]
- Akhoondzadeh, M.; Marchetti, D. Developing a Fuzzy Inference System Based on Multi-Sensor Data to Predict Powerful Earthquake Parameters. Remote Sens. 2022, 14, 3203. [Google Scholar] [CrossRef]
- Khan, I.; Choi, S.; Kwon, Y.-W. Earthquake Detection in a Static and Dynamic Environment Using Supervised Machine Learning and a Novel Feature Extraction Method. Sensors 2020, 14, 3203. [Google Scholar] [CrossRef]
- Murti, M.A.; Junior, R.; Ahmed, A.N.; Elshafie, A. Earthquake multi-classification detection based velocity and displacement data filtering using machine learning algorithms. Sci. Rep. 2022, 12, 21200. [Google Scholar] [CrossRef]
- Mishra, M.; Lourenço, P.B.; Ramana, G.V. Structural health monitoring of civil engineering structures by using the internet of things: A review. J. Build. Eng. 2022, 48, 103954. [Google Scholar] [CrossRef]
- Scislo, L. High Activity Earthquake Swarm Event Monitoring and Impact Analysis on Underground High Energy Physics Research Facilities. Energies 2022, 15, 3705. [Google Scholar] [CrossRef]
- López-Castro, B.; Haro-Baez, A.G.; Arcos-Aviles, D.; Barreno-Riera, M.; Landázuri-Avilés, B. A Systematic Review of Structural Health Monitoring Systems to Strengthen Post-Earthquake Assessment Procedures. Sensors 2022, 22, 9206. [Google Scholar] [CrossRef]
- Lee, J.; Khan, I.; Choi, S.; Kwon, Y.-W. A Smart IoT Device for Detecting and Responding to Earthquakes. Electronics 2019, 8, 1546. [Google Scholar] [CrossRef]
- Won, J.; Park, J.; Park, J.W.; Kim, I. BLESeis: Low-Cost IoT Sensor for Smart Earthquake Detection and Notification. Sensors 2020, 20, 2963. [Google Scholar] [CrossRef]
- Le Breton, M.; Liébault, F.; Baillet, L.; Charléty, A.; Larose, É.; Tedjini, S. Dense and long-term monitoring of earth surface processes with passive RFID—A review. Earth-Sci. Rev. 2022, 234, 104225. [Google Scholar] [CrossRef]
- Hsu, T.-Y.; Nieh, C.P. On-Site Earthquake Early Warning Using Smartphones. Sensors 2020, 20, 2928. [Google Scholar] [CrossRef] [PubMed]
- Hillier, A.J.R.; Makarovaite, V.; Gourlay, C.W.; Holder, S.J.; Batchelor, J.C. A Passive UHF RFID Dielectric Sensor for Aqueous Electrolytes. IEEE Sens. J. 2019, 19, 5389–5395. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, J.; Ma, Y.; Liang, X. RF-RES: Respiration Monitoring With COTS RFID Tags by Doppler shift. IEEE Sens. J. 2021, 21, 24844–24854. [Google Scholar] [CrossRef]
- Tajin, M.A.S.; Mongan, W.M.; Dandekar, K.R. Passive RFID-Based Diaper Moisture Sensor. IEEE Trans. Electron. Devices IEEE Sens. J. 2021, 21, 1665–1674. [Google Scholar] [CrossRef]
- Pichorim, S.F.; Gomes, N.J.; Batchelor, J.C. Two Solutions of Soil Moisture Sensing with RFID for Landslide Monitoring. Sensors 2018, 18, 452. [Google Scholar] [CrossRef]
- Qian, X.; Li, Z.; Meng, Z.; Gao, N.; Zhang, Z. Flexible RFID Tag for Sensing the Total Minerals in Drinking Water via Smartphone Tapping. IEEE Sens. J. 2021, 21, 24749–24758. [Google Scholar] [CrossRef]
- Pereira, F.; Correia, R.; Pinho, P.; Lopes, S.I.; Carvalho, N.B. Challenges in Resource-Constrained IoT Devices: Energy and Communication as Critical Success Factors for Future IoT Deployment. Sensors 2020, 20, 6420. [Google Scholar] [CrossRef]
- Wang, W.; Zeng, W.; Sonkusale, S. Battery-Free Shape Memory Alloy Antennas for Detection and Recording of Peak Temperature Activity. Crystals 2022, 12, 86. [Google Scholar] [CrossRef]
- Zeng, W.; Wang, W.; Sonkusale, S. Temperature Sensing Shape Morphing Antenna (ShMoA). Micromachines 2022, 13, 1673. [Google Scholar] [CrossRef]
- Wang, W.; Owyeung, R.; Sadeqi, A.; Sonkusale, S. Single event recording of temperature and tilt using liquid metal with RFID tags. IEEE Sens. J. 2020, 20, 3249–3256. [Google Scholar] [CrossRef]
- Cappelli, I.; Fort, A.; Mugnaini, M.; Panzardi, E.; Pozzebon, A.; Tani, M.; Vignoli, V. Battery-Less HF RFID Sensor Tag for Soil Moisture Measurements. IEEE Trans. Instrum. Meas. 2021, 70, 1–13. [Google Scholar] [CrossRef]
- Occhiuzzi, C.; Cippitelli, S.; Marrocco, G. Modeling, design and experimentation of wearable RFID sensor tag. IEEE Trans. Antennas Propag. 2010, 58, 2490–2498. [Google Scholar] [CrossRef]
- Philipose, M.; Smith, J.R.; Jiang, B.; Mamishev, A.; Roy, S.; Sundara-Rajan, K. Battery-free wireless identification and sensing. IEEE Pervasive Comput. 2005, 4, 37–45. [Google Scholar] [CrossRef]
- Chen, X.; Feng, D.; Takeda, S.; Kagoshima, K.; Umehira, M. Experimental Validation of a New Measurement Metric for Radio-Frequency Identification-Based Shock-Sensor Systems. IEEE J. Radio Freq. Identif. 2018, 2, 206–209. [Google Scholar] [CrossRef]
- Rahmadya, B.; Chen, X.; Takeda, S.; Kagoshima, K.; Umehira, M.; Kurosaki, W. Measurement of a UHF RFID-Based Battery-Less Vibration Frequency Sensitive Sensor Tag Using Tilt/Vibration Switches. IEEE Sens. J. 2020, 20, 9901–9909. [Google Scholar] [CrossRef]
- Sunny, A.I.; Zhao, A.; Li, L.; Kanteh Sakiliba, S. Low-Cost IoT-Based Sensor System: A Case Study on Harsh Environmental Monitoring. Sensors 2021, 21, 214. [Google Scholar] [CrossRef]
- Liu, Q.; Yu, Y.; Wang, D.-W.; Wang, G. An RFID-Based Wireless Multistate Controller With Quasi-Isotropic Radiation Pattern for Remote Control Applications. IEEE Antennas Wirel. Propag. Lett. 2021, 20, 2023–2027. [Google Scholar] [CrossRef]
- Asci, C.; Wang, W.; Sonkusale, S. Security monitoring system using magnetically-activated RFID tags. In Proceedings of the 2020 IEEE Sensors, Rotterdam, The Netherlands, 25–28 October 2020. [Google Scholar] [CrossRef]
- Wang, W.; Sadeqi, A.; Nejad, H.R.; Sonkusale, S. Costeffective wireless sensors for detection of package opening and tampering. IEEE Access 2020, 8, 117122–117132. [Google Scholar] [CrossRef]
- Zhang, M.; Liu, Z.; Shen, C.; Wu, J.; Zhao, A. A Review of Radio Frequency Identification Sensing Systems for Structural Health Monitoring. Materials. Materials 2022, 15, 7851. [Google Scholar] [CrossRef]
- Wang, W.; Asci, C.; Zeng, W.; Sonkusale, S. Zero-power screen printed flexible RFID sensors for Smart Home. J. Ambient. Intell. Humaniz. Comput. 2022, 1–10. [Google Scholar] [CrossRef]
- Duggal, R.; Gupta, N.; Pandya, A.; Mahajan, P.; Sharma, K.; Angra, P. Building structural analysis based Internet of Things network assisted earthquake detection. Internet Thing 2022, 19, 100561. [Google Scholar] [CrossRef]
- Zhang, A.L.; Chen, X.; Jiang, Z.Q.; Kang, Y.T.; Yang, X.F. Experiment on seismic behavior of earthquake-resilience prefabricated cross hinge column foot joint. Constr. Steel Res. 2022, 189, 107056. [Google Scholar] [CrossRef]
- Nie, G.-Y.; Bodda, S.S.; Sandhu, H.K.; Han, K.; Gupta, A. Computer-Vision-Based Vibration Tracking Using a Digital Camera: A Sparse-Optical-Flow-Based Target Tracking Method. Sensors 2022, 22, 6869. [Google Scholar] [CrossRef]
- Bolognini, M.; Izzo, G.; Marchisotti, D.; Fagiano, L.; Limongelli, M.P.; Zappa, E. Vision-based modal analysis of built environment structures with multiple drones, Automation in Construction. Sciencedirect 2022, 143, 104550. [Google Scholar] [CrossRef]
- Song, Z.; Rahmadya, B.; Sun, R.; Takeda, S. An RFID-Based Wireless Vibration and Physical-Shock Sensing System Using Edge Processing. IEEE Sens. J. 2022, 22, 20010–20018. [Google Scholar] [CrossRef]
- Červený, L.; Sloup, R.; Červená, T.; Riedl, M.; Palátová, P. Industry 4.0 as an Opportunity and Challenge for the Furniture Industry—A Case Study. Sustainability 2022, 14, 13325. [Google Scholar] [CrossRef]
- Nicoletti, V.; Arezzo, D.; Carbonari, S.; Gara, F. Dynamic monitoring of buildings as a diagnostic tool during construction phases. Build. Eng. 2022, 46, 103764. [Google Scholar] [CrossRef]
- Castiglioni, C.A.; Drei, A.; Kanyilmaz, A. Continuous Monitoring of Service Conditions of a Steel Storage Racking System. Earthq. Eng. 2018, 24, 485–505. [Google Scholar] [CrossRef]
- G-DEVICE. MN530-02S. Available online: https://www.catch-sensor.co.jp/en/product/06.html (accessed on 11 November 2022).
- Murata. LXMS21ACMF-183. Available online: https://www.murata.com/-/media/webrenewal/products/rfid/rfid/pdf/lxms21acmf-183_datasheet_190729.ashx?la=ja-jp (accessed on 11 November 2022).
- atlasRFIDstore, “Duty Cycle: What Is It and How Is It Used?”. Available online: https://www.atlasrfidstore.com/rfid-insider/duty-cycle-what-is-it-and-how-is-it-used (accessed on 11 November 2022).
- TSS.DOTR-3200. Available online: https://rfid.tss21.co.jp/product/dotr-3000/ (accessed on 11 November 2022).
- MPU-6000 and MPU-6050 Product Specification Revision 3.4. Available online: https://html.alldatasheet.com/html-pdf/1132807/TDK/MPU-6050/63/1/MPU-6050.html (accessed on 13 February 2023).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Principles and Objectives |
|---|---|
| SHM [7] | This system monitors adverse structural changes, achieving reliability and life cycle management. This has been widely used in various civil engineering fields. |
| IoT [10,11,12,13] | IoT technologies collect data on vibrations, physical shocks, temperatures, and humidity and upload the data to IoT clouds. |
| IMU [34] | This system combines an accelerometer and gyro sensor, monitoring the accelerations and rotations of motions. IMU monitors building structures. |
| Strain gauges [35] | This system measures the strain force on the beam to evaluate the seismic performance of the building. |
| ArUco markers [36,37] | These systems use industrial cameras to measure the displacements of building structures, analyzing their vibrations. |
| RFID [20,21,22,23,24,25,26,27,28] | They combine various sensors with RFID systems to realize low-cost and batteryless wireless sensing. |
| This work | An RFID-based batteryless vibration/physical-shock sensing system for long-term monitoring [38] enables the detection of earthquake-caused furniture vibrations. Finding unstable objects by exploiting the vibrations caused by weaker earthquakes is effective as one of the potential countermeasures for large-scale earthquakes in earthquake-prone areas. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, Z.; Rahmadya, B.; Sun, R.; Takeda, S. A Feasibility Study on Monitoring Earthquake-Caused Furniture Vibrations Using Radiofrequency Identification Sensor Tags. Sensors 2023, 23, 3279. https://doi.org/10.3390/s23063279
Song Z, Rahmadya B, Sun R, Takeda S. A Feasibility Study on Monitoring Earthquake-Caused Furniture Vibrations Using Radiofrequency Identification Sensor Tags. Sensors. 2023; 23(6):3279. https://doi.org/10.3390/s23063279
Chicago/Turabian StyleSong, Zequn, Budi Rahmadya, Ran Sun, and Shigeki Takeda. 2023. "A Feasibility Study on Monitoring Earthquake-Caused Furniture Vibrations Using Radiofrequency Identification Sensor Tags" Sensors 23, no. 6: 3279. https://doi.org/10.3390/s23063279
APA StyleSong, Z., Rahmadya, B., Sun, R., & Takeda, S. (2023). A Feasibility Study on Monitoring Earthquake-Caused Furniture Vibrations Using Radiofrequency Identification Sensor Tags. Sensors, 23(6), 3279. https://doi.org/10.3390/s23063279