
Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry


Abstract
1. Introduction
2. Materials and Methods
2.1. Workflow of the Proposed Data Processing Method
- —is the displacement in the east, north, and height directions,
- —is the identification name of the common feature point,
- —denote the first and second epochs.
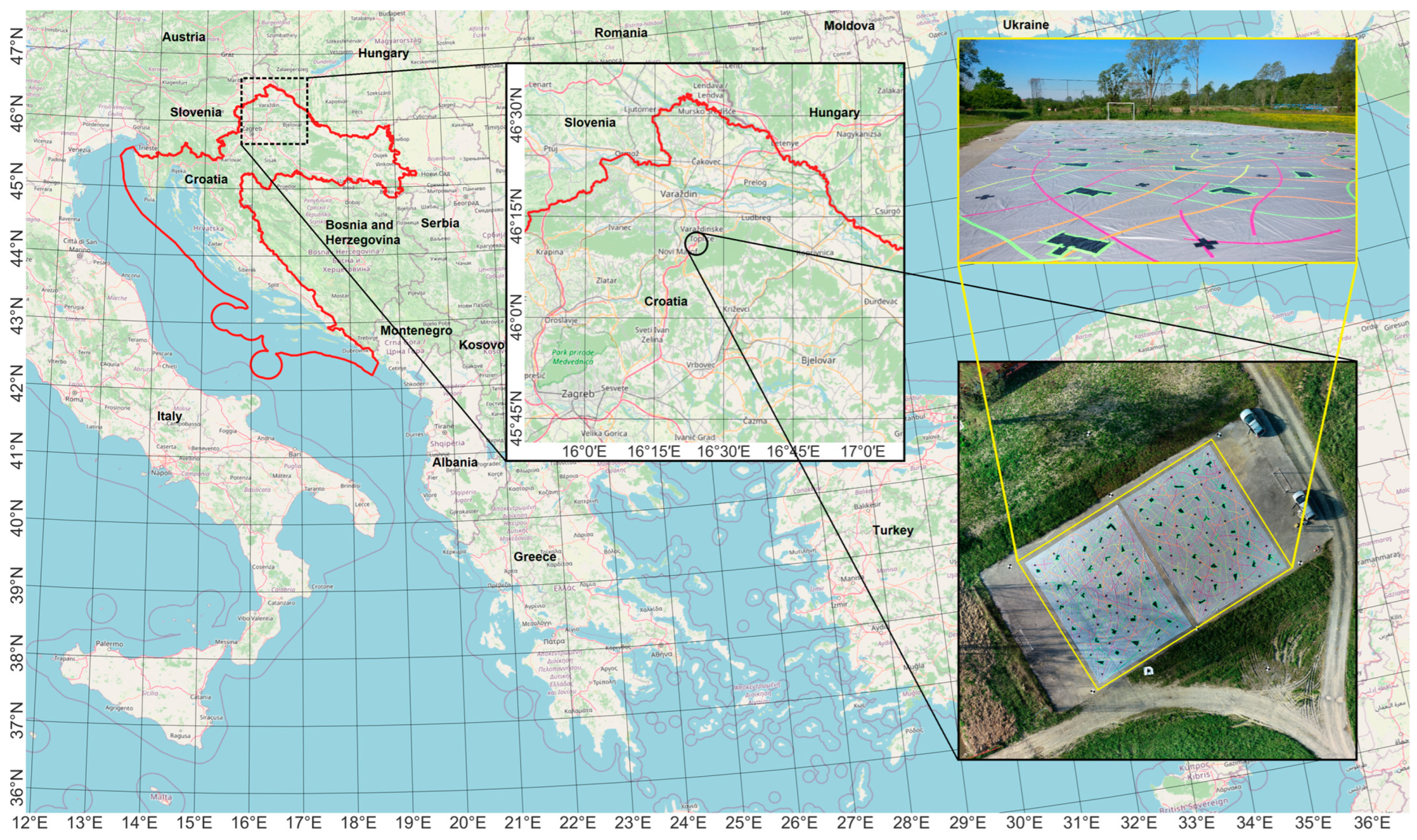
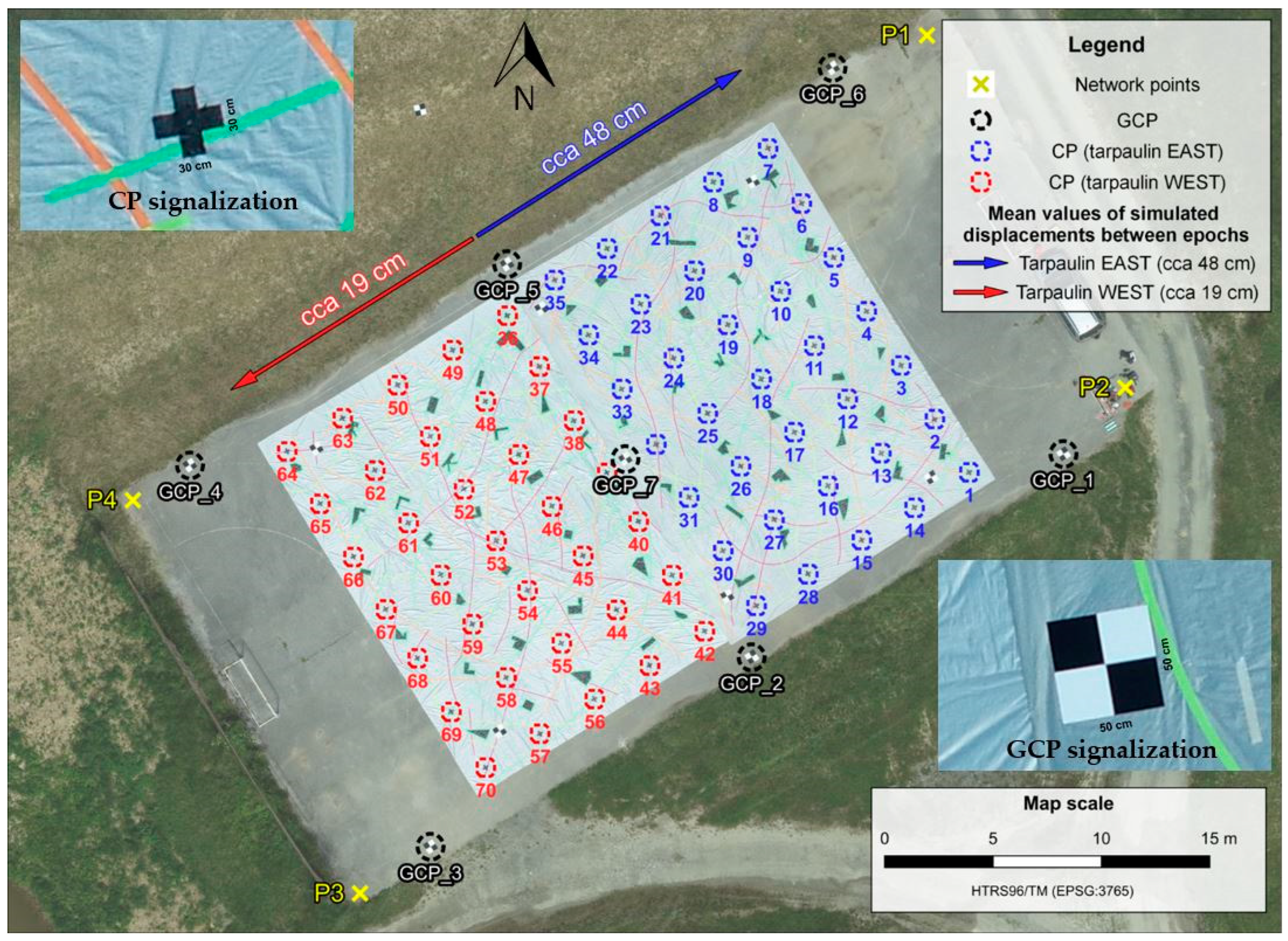
2.2. Test Field—Establishment and Simulation of the Landslide
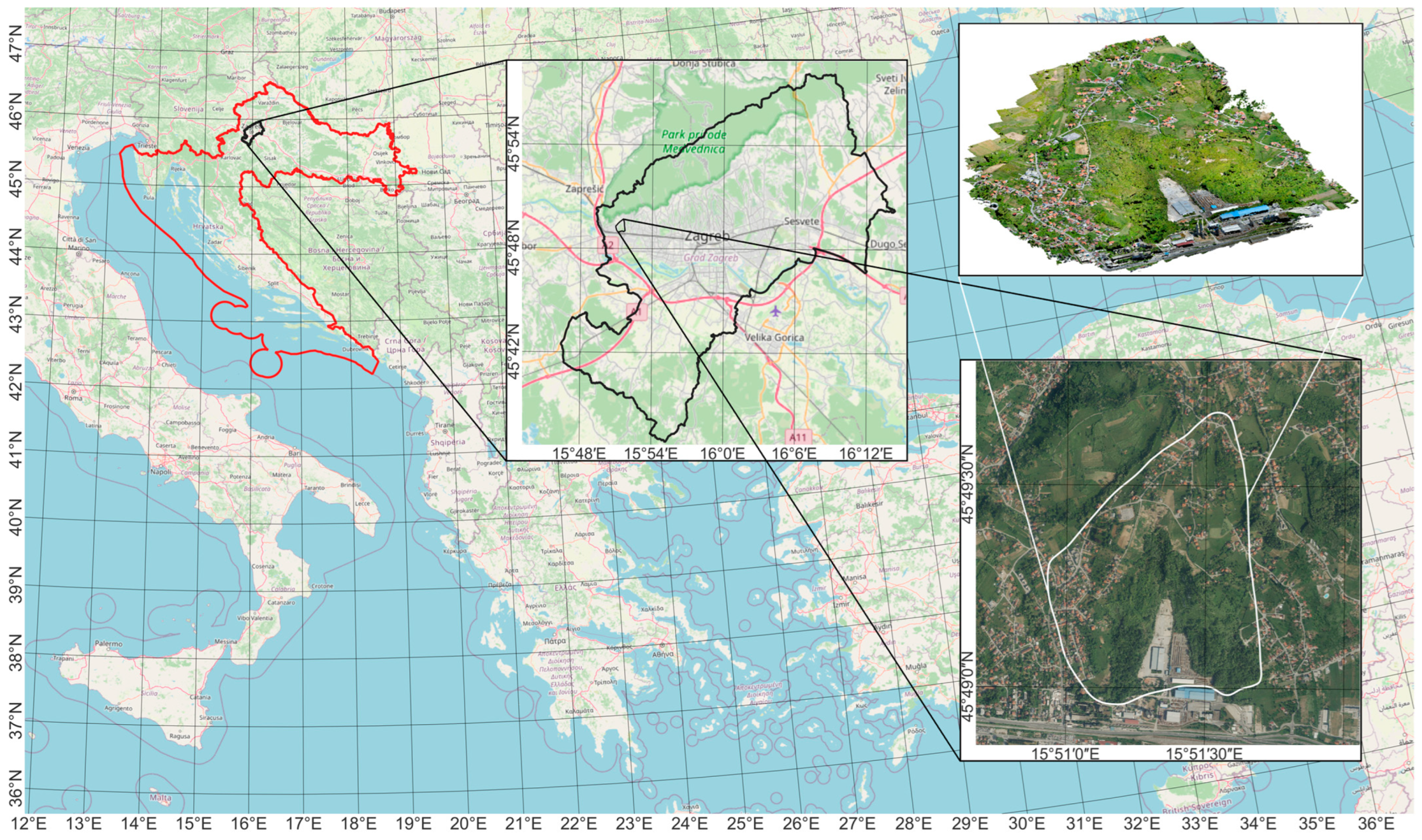
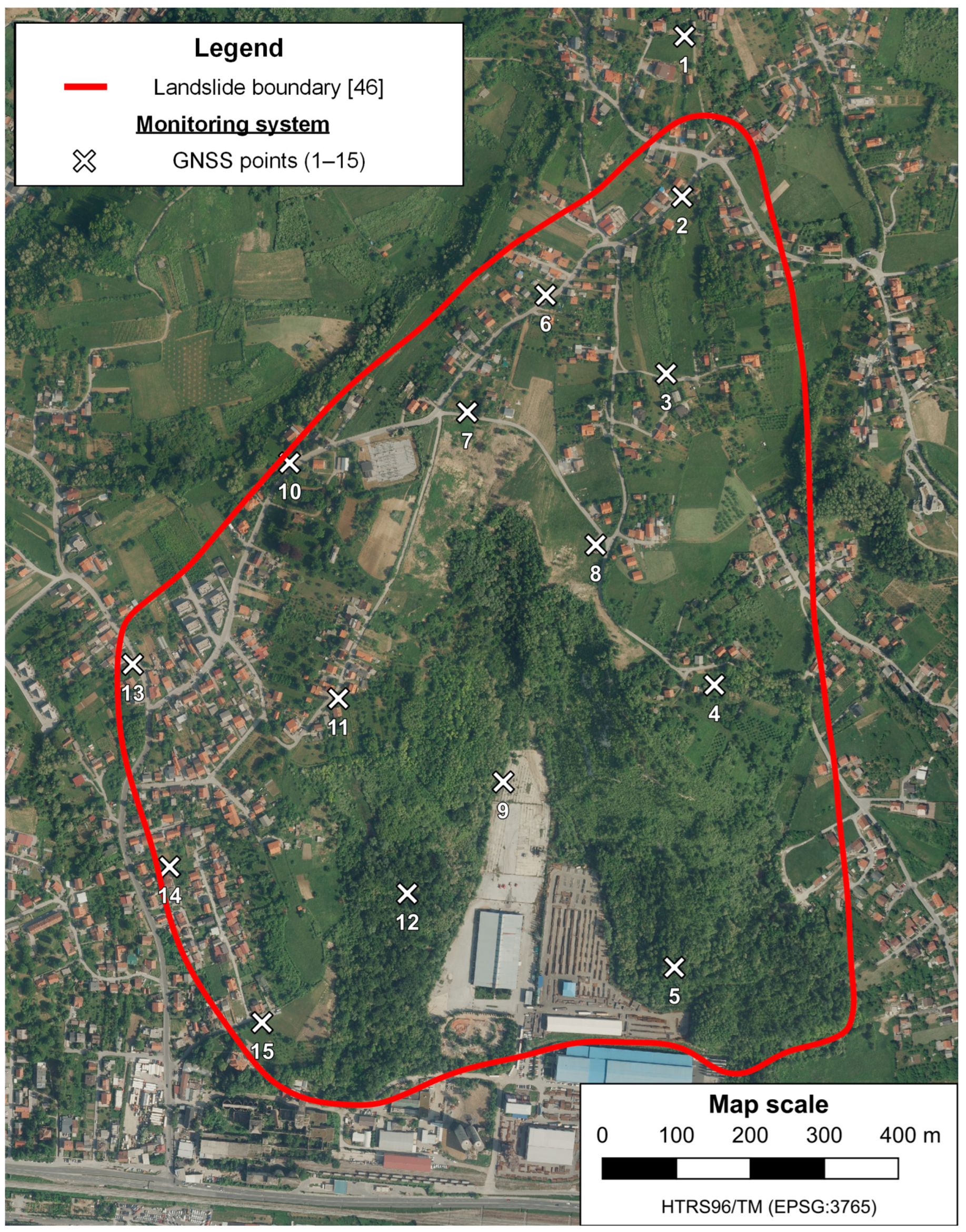
2.3. Case Study—Application of the Proposed Data Processing Method on the Kostanjek Landslide
3. Results
3.1. Test Field—Results of the Proposed Data Processing Method
3.2. Test Field—The Accuracy of Displacement Determination Using the Proposed Data Processing Method
- —reference value,
- —determined value,
- i—index of the CP .
3.3. Test Field—Displacements Determined from Orthomosaics Images
3.4. Case Study—The Accuracy of Displacement Determination Using the Proposed Data Processing Method on the Kostanjek Landslide
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mihalić Arbanas, S.; Arbanas, Ž. Landslide mapping and monitoring: Review of conventional and advanced techniques. In Proceedings of the IV Symposium of the Macedonian Association for Geotechnics, Struga, Macedonia, 25–28 June 2014. [Google Scholar]
- Podolszki, L.; Kosović, I.; Novosel, T.; Kurečić, T. Multi-Level Sensing Technologies in Landslide Research—Hrvatska Kostajnica Case Study, Croatia. Sensors 2021, 22, 177. [Google Scholar] [CrossRef]
- Crozier, M.J. Deciphering the Effect of Climate Change on Landslide Activity: A Review. Geomorphology 2010, 124, 260–267. [Google Scholar] [CrossRef]
- Pajalić, S.; Peranić, J.; Maksimović, S.; Čeh, N.; Jagodnik, V.; Arbanas, Ž. Monitoring and Data Analysis in Small-Scale Landslide Physical Model. Appl. Sci. 2021, 11, 5040. [Google Scholar] [CrossRef]
- Arbanas, S.; Arbanas, Ž.; Bernat, S.; Krkač, M.; Kalinić, P.; Martinović, K.; Sajko, J.; Fabris, N.; Antolović, A. Upravljanje kriznim situacijama uslijed pokretanja klizišta (Management of the crisis situations caused by landslide activations). In Proceedings of the V. Konferencija Hrvatske Platforme za Smanjenje Rizika od Katastrofa, Valbaldon, Croatia, 17–18 October 2013. [Google Scholar]
- Scaioni, M. Modern Technologies for Landslide Monitoring and Prediction; Springer: Berlin/Heidelberg, Germany, 2015; Volume 6, ISBN 978-3-662-45930-0. [Google Scholar]
- Krkač, M.; Bernat Gazibara, S.; Sečanj, M.; Arbanas, Ž.; Mihalić Arbanas, S. Continuous monitoring of the Kostanjek landslide. In Proceedings of the 4th Regional Symposium on Landslides in the Adriatic-Balkan Region (4th ReSyLAB), Sarajevo, Bosnia and Herzegovina, 23–25 October 2019. [Google Scholar]
- Krkač, M.; Bernat Gazibara, S.; Sečanj, M.; Sinčić, M.; Mihalić Arbanas, S. Kinematic model of the slow-moving Kostanjek landslide in Zagreb, Croatia. Rud. Zb. 2021, 36, 59–68. [Google Scholar] [CrossRef]
- Acar, M.; Ozludemir, M.T.; Erol, S.; Celik, R.N.; Ayan, T. Kinematic landslide monitoring with Kalman filtering. Nat. Hazards Earth Syst. Sci. 2008, 8, 213–221. [Google Scholar] [CrossRef]
- Scaioni, M.; Longoni, L.; Melillo, V.; Papini, M. Remote Sensing for Landslide Investigations: An Overview of Recent Achievements and Perspectives. Remote Sens. 2014, 6, 9600–9652. [Google Scholar] [CrossRef]
- Gili, J.A.; Corominas, J.; Rius, J. Using Global Positioning System techniques in landslide monitoring. Eng. Geol. 2000, 55, 167–192. [Google Scholar] [CrossRef]
- Giordan, D.; Allasia, P.; Manconi, A.; Baldo, M.; Santangelo, M.; Cardinali, M.; Corazza, A.; Albanese, V.; Lollino, G.; Guzzetti, F. Morphological and kinematic evolution of a large earthflow: The Montaguto landslide, southern Italy. Geomorphology 2013, 187, 61–79. [Google Scholar] [CrossRef]
- Malet, J.-P.; Maquaire, O.; Calais, E. The use of Global Positioning System techniques for the continuous monitoring of landslides: Application to the Super-Sauze earthflow (Alpes-de-Haute-Provence, France). Geomorphology 2002, 43, 33–54. [Google Scholar] [CrossRef]
- Salvini, R.; Vanneschi, C.; Riccucci, S.; Francioni, M.; Gullì, D. Application of an integrated geotechnical and topographic monitoring system in the Lorano marble quarry (Apuan Alps, Italy). Geomorphology 2015, 241, 209–223. [Google Scholar] [CrossRef]
- Stiros, S.C.; Vichas, C.; Skourtis, C. Landslide Monitoring Based On Geodetically Derived Distance Changes. J. Surv. Eng. 2004, 130, 156–162. [Google Scholar] [CrossRef]
- Merritt, A.J.; Chambers, J.E.; Murphy, W.; Wilkinson, P.B.; West, L.J.; Gunn, D.A.; Meldrum, P.I.; Kirkham, M.; Dixon, N. 3D ground model development for an active landslide in Lias mudrocks using geophysical, remote sensing and geotechnical methods. Landslides 2013, 11, 537–550. [Google Scholar] [CrossRef]
- Delacourt, C.; Allemand, P.; Berthier, E.; Raucoules, D.; Casson, B.; Grandjean, P.; Pambrun, C.; Varel, E. Remote-sensing techniques for analysing landslide kinematics: A review. BSGF-Earth Sci. Bull. 2007, 178, 89–100. [Google Scholar] [CrossRef]
- Tofani, V.; Segoni, S.; Agostini, A.; Catani, F.; Casagli, N. Technical Note: Use of remote sensing for landslide studies in Europe. Nat. Hazards Earth Syst. Sci. 2013, 13, 299–309. [Google Scholar] [CrossRef]
- Angeli, M.; Pasuto, A.; Silvano, S. A critical review of landslide monitoring experiences. Eng. Geol. 2000, 55, 133–147. [Google Scholar] [CrossRef]
- Farina, P.; Colombo, D.; Fumagalli, A.; Marks, F.; Moretti, S. Permanent Scatterers for landslide investigations: Outcomes from the ESA-SLAM project. Eng. Geol. 2006, 88, 200–217. [Google Scholar] [CrossRef]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogram. Remote. Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Eltner, A.; Kaiser, A.; Castillo, C.; Rock, G.; Neugirg, F.; Abellán, A. Image-based surface reconstruction in geomorphometry—Merits, limits and developments. Earth Surf. Dyn. 2016, 4, 359–389. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Straightforward reconstruction of 3D surfaces and topography with a camera: Accuracy and geoscience application. J. Geophys. Res. Earth Surf. 2012, 117, 03017. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S. Mitigating systematic error in topographic models derived from UAV and ground-based image networks. Earth Surf. Process. Landforms 2014, 39, 1413–1420. [Google Scholar] [CrossRef]
- Tarolli, P. High-resolution topography for understanding Earth surface processes: Opportunities and challenges. Geomorphology 2014, 216, 295–312. [Google Scholar] [CrossRef]
- Niethammer, U.; James, M.R.; Rothmund, S.; Travelletti, J.; Joswig, M. UAV-based remote sensing of the Super-Sauze landslide: Evaluation and results. Eng. Geol. 2012, 128, 2–11. [Google Scholar] [CrossRef]
- Marendić, A.; Paar, R.; Tomić, H.; Roić, M.; Krkač, M. Deformation monitoring of Kostanjek landslide in Croatia using multiple sensor networks and UAV. In Proceedings of the 7th International Conference on Engineering Surveying (INGEO 2017), Lisbon, Portugal, 18–20 October 2017. [Google Scholar]
- Peternel, T.; Kumelj, Š.; Oštir, K.; Komac, M. Monitoring the Potoška planina landslide (NW Slovenia) using UAV photogrammetry and tachymetric measurements. Landslides 2016, 14, 395–406. [Google Scholar] [CrossRef]
- Lague, D.; Brodu, N.; Leroux, J. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (N-Z). ISPRS J. Photogramm. Remote Sens. 2013, 82, 10–26. [Google Scholar] [CrossRef]
- Wheaton, J.M.; Brasington, J.; Darby, S.E.; Sear, D.A. Accounting for uncertainty in DEMs from repeat topographic surveys: Improved sediment budgets. Earth Surf. Process. Landf. 2010, 35, 136–156. [Google Scholar] [CrossRef]
- Hsieh, Y.-C.; Chan, Y.-C.; Hu, J.-C. Digital Elevation Model Differencing and Error Estimation from Multiple Sources: A Case Study from the Meiyuan Shan Landslide in Taiwan. Remote Sens. 2016, 8, 199. [Google Scholar] [CrossRef]
- Warrick, J.A.; Ritchie, A.C.; Adelman, G.; Adelman, K.; Limber, P.W. New Techniques to Measure Cliff Change from Historical Oblique Aerial Photographs and Structure-from-Motion Photogrammetry. J. Coast. Res. 2017, 33, 39–55. [Google Scholar] [CrossRef]
- James, M.R.; Robson, S.; D’Oleire-Oltmanns, S.; Niethammer, U. Optimising UAV topographic surveys processed with structure-from-motion: Ground control quality, quantity and bundle adjustment. Geomorphology 2017, 280, 51–66. [Google Scholar] [CrossRef]
- Crawford, B.; Swanson, E.; Schultz-Fellenz, E.; Collins, A.; Dann, J.; Lathrop, E.; Milazzo, D. A New Method for High Resolution Surface Change Detection: Data Collection and Validation of Measurements from UAS at the Nevada National Security Site, Nevada, USA. Drones 2021, 5, 25. [Google Scholar] [CrossRef]
- Moritani, R.; Kanai, S.; Date, H.; Niina, Y.; Honma, R. Plausible Reconstruction of an Approximated Mesh Model for Next-Best View Planning of SfM-MVS. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2, 465–471. [Google Scholar] [CrossRef]
- Moritani, R.; Kanai, S.; Date, H.; Niina, Y.; Honma, R. Quality Prediction of Dense Points Generated by Structure from Motion for High-Quality and Efficient As-Is Model Reconstruction. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII–2, 95–101. [Google Scholar] [CrossRef]
- Jakopec, I.; Marendić, A.; Grgac, I. A novel approach to landslide monitoring based on unmanned aerial system photogrammetry. Rudarsko-geološko-naftni Zbornik 2022, 37, 83–101. [Google Scholar] [CrossRef]
- Jakopec, I. Development of Photogrammetric Data Processing Method for Landslide Monitoring Using Unmanned Aircraft Systems. Ph.D. Thesis, University of Zagreb, Zagreb, Croatia, 2022. [Google Scholar]
- Pebesma, E.J. Multivariable geostatistics in S: The gstat package. Comput. Geosci. 2004, 30, 683–691. [Google Scholar] [CrossRef]
- Pebesma, E.J.; Wesseling, C.G. Gstat: A program for geostatistical modelling, prediction and simulation. Comput. Geosci. 1998, 24, 17–31. [Google Scholar] [CrossRef]
- Leica TPS1200-User Manual. Available online: https://www.manualsdir.com/manuals/164878/leica-tps1200.html (accessed on 11 November 2022).
- Brückl, E.; Brunner, F.K.; Kraus, K. Kinematics of a deep-seated landslide derived from photogrammetric, GPS and geophysical data. Eng. Geol. 2006, 88, 149–159. [Google Scholar] [CrossRef]
- Krkač, M.; Špoljarić, D.; Bernat, S.; Arbanas, S.M. Method for prediction of landslide movements based on random forests. Landslides 2016, 14, 947–960. [Google Scholar] [CrossRef]
- Stanić, B.; Nonveiller, E. The Kostanjek landslide in Zagreb. Eng. Geol. 1996, 42, 269–283. [Google Scholar] [CrossRef]
- Cruden, D.M.; Varnes, D.J. Landslide Types and Processes; Transportation Research Board: Washington, DC, USA, 1996; ISBN 978-0-309-06208-4. [Google Scholar]
- Ortolan, Ž. Formiranje Prostornog Inženjerskogeološkog Modela Dubokog Klizišta s Više Kliznih Ploha (Primjer Klizište Kostanjek). PhD Thesis, University of Zagreb, Zagreb, Croatia, 1996. [Google Scholar]
- VPPS-CROPOS. Available online: https://www.cropos.hr/servisi/vpps (accessed on 17 November 2022).
- OpenSfM. Available online: https://github.com/mapillary/OpenSfM (accessed on 23 September 2020).
- OpenDroneMap (ODM) [Online]. Available online: https://github.com/OpenDroneMap/ODM (accessed on 3 March 2021).
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mission Parameters | First Mission | Second Mission |
|---|---|---|
| Number of waypoints | 38 | 50 |
| Approximate flight area [m2] | 11,000 | 44,000 |
| Distance between consecutive images [m] | 10.94 | 25.97 |
| Tilt of camera | 70° | |
| Forward overlap | 80% | |
| Side overlap | 85% | |
| Flying altitude (above ground level) [m] | 50 | 120 |
| Flying speed [m/s] | 2.5 | 5 |
| Ground sample distance (GSD) [cm/px] | 1.50 | 3.56 |
| First Mission | Second Mission | |||
|---|---|---|---|---|
| Epoch 1 | Epoch 2 | Epoch 1 | Epoch 2 | |
| Start time [hh:mm] | 11:46 | 16:24 | 10:42 | 15:37 |
| End time [hh:mm] | 12:02 | 16:41 | 10:58 | 15:52 |
| Flight duration [hh:mm] | 0:16 | 0:17 | 0:16 | 0:15 |
| Number of acquired images | 217 | 216 | 161 | 161 |
| Shutter speed | 1/400 | |||
| Aperture | 8 | |||
| ISO (auto) | 100 | |||
| Mission Parameters | First Mission | Second Mission |
|---|---|---|
| Number of waypoints | 56 | 82 |
| Approximate surveyed area | 1.619 km2 | 1.624 km2 |
| Distance between consecutive images | 43 m | 22 m |
| Tilt of camera | 90° | 90° |
| Forward overlap | 70% | 80% |
| Side overlap | 75% | 70% |
| Flying altitude (above ground level) | 160 m | 120 m |
| Flying speed | 10 m/s | 11 m/s |
| Ground sample distance | 3.9 cm/px | 2.3 cm/px |
| UAS Missions | ||
|---|---|---|
| First Mission (24 April 2017) | Second Mission (2 May 2019) | |
| Start time [hh:mm] | 9:51 | 9:20 |
| End time [hh:mm] | 10:36 | 10:25 |
| Flight duration [hh:mm] | 0:45 | 1:05 |
| Number of acquired images | 562 | 1530 |
| Shutter speed (auto) | 1/1000 | 1/2000 |
| Aperture (auto) | F/2.8–F/7.1 | F/3.6–F/5.6 |
| ISO (auto) | 125–320 | 160–640 |
| Statistics Values | Tarpaulin in the East (n = 35) | Tarpaulin in the West (n = 35) | ||||
|---|---|---|---|---|---|---|
| ∆E [cm] | ∆N [cm] | ∆H [cm] | ∆E [cm] | ∆N [cm] | ∆H [cm] | |
| Referent (total station) displacements | ||||||
| Min | 39.6 | 21.7 | −0.4 | −19.0 | −11.6 | −0.2 |
| Max | 43.7 | 28.0 | 0.3 | −13.3 | −4.9 | 0.4 |
| Range | 4.1 | 6.3 | 0.7 | 5.7 | 6.7 | 0.6 |
| Mean | 41.3 | 24.9 | 0.0 | −16.8 | −8.8 | 0.1 |
| Mean 2D | 48.2 cm, 59.0° NE direction | 18.9 cm, 242.4° SW direction | ||||
| Determined displacements—First mission | ||||||
| Min | 38.6 | 21.9 | −1.1 | −20.6 | −11.8 | −1.0 |
| Max | 44.8 | 29.0 | 0.8 | −14.0 | −4.9 | 2.0 |
| Range | 6.3 | 7.1 | 1.9 | 6.6 | 6.8 | 3.1 |
| Mean | 41.4 | 25.2 | −0.4 | −17.3 | −8.9 | 0.1 |
| Mean 2D | 48.4 cm, 58.7° NE direction | 19.7 cm, 242.8° SW direction | ||||
| Determined displacements—Second mission | ||||||
| Min | 37.9 | 21.0 | −1.2 | −21.2 | −12.5 | −1.7 |
| Max | 44.1 | 28.0 | 0.8 | −11.8 | −4.6 | 2.8 |
| Range | 6.1 | 7.0 | 2.0 | 9.4 | 7.9 | 4.5 |
| Mean | 41.1 | 24.6 | −0.5 | −17.7 | −9.5 | 0.3 |
| Mean 2D | 47.9 cm, 59.1° NE direction | 20.1 cm, 241.6° SW direction | ||||
| Residuals in the First Mission [cm] | Residuals in the Second Mission [cm] | |||||
|---|---|---|---|---|---|---|
| ∆E | ∆N | ∆H | ∆E | ∆N | ∆H | |
| Min | −1.9 | −2.0 | −1.8 | −4.3 | −2.7 | −2.8 |
| Max | 3.7 | 1.2 | 1.2 | 3.4 | 3.0 | 1.8 |
| Range | 5.6 | 3.2 | 3.0 | 7.7 | 5.7 | 4.6 |
| Mean | 0.2 | −0.1 | 0.2 | 0.6 | 0.5 | 0.1 |
| RMSE 1D | 0.9 | 0.5 | 0.6 | 1.4 | 1.1 | 0.8 |
| RMSE 2D | 1.0 | - | 1.8 | - | ||
| RMSE 3D | 1.2 | 1.9 | ||||
| Residuals in the First Mission [cm] | Residuals in the Second Mission [cm] | |||
|---|---|---|---|---|
| ∆E | ∆N | ∆E | ∆N | |
| Min | −4.4 | −4.0 | −5.4 | −5.4 |
| Max | 3.2 | 2.8 | 7.5 | 3.9 |
| Range | 7.6 | 6.8 | 12.8 | 9.3 |
| Mean | −0.3 | −0.4 | 0.0 | −0.4 |
| RMSE 1D | 1.7 | 1.4 | 2.3 | 1.7 |
| RMSE 2D | 2.2 | 2.9 | ||
| Statistics Values | Residuals (n = 14) | ||
|---|---|---|---|
| ∆E [cm] | ∆N [cm] | ∆H [cm] | |
| Min | −5.0 | −4.7 | −4.7 |
| Max | 6.5 | 5.5 | 8.7 |
| Range | 11.5 | 10.3 | 13.4 |
| Mean | −0.2 | 0.1 | 1.2 |
| RMSE 1D | 2.7 | 3.0 | 3.5 |
| RMSE 2D | 4.0 | ||
| RMSE 3D | 5.4 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jakopec, I.; Marendić, A.; Grgac, I. Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry. Sensors 2023, 23, 3097. https://doi.org/10.3390/s23063097
Jakopec I, Marendić A, Grgac I. Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry. Sensors. 2023; 23(6):3097. https://doi.org/10.3390/s23063097
Chicago/Turabian StyleJakopec, Ivan, Ante Marendić, and Igor Grgac. 2023. "Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry" Sensors 23, no. 6: 3097. https://doi.org/10.3390/s23063097
APA StyleJakopec, I., Marendić, A., & Grgac, I. (2023). Accuracy Analysis of a New Data Processing Method for Landslide Monitoring Based on Unmanned Aerial System Photogrammetry. Sensors, 23(6), 3097. https://doi.org/10.3390/s23063097