
Reducing the Uncertainty of the Moving Object Location Measurement with the Method of Quasi-Multiple Measurement in GNSS Technology in Symmetrical Arrangement

 , ,
, ,  ,
,  , , and
, , and
Abstract
1. Introduction
2. Quasi-Multiple Measurements for Satellite-Based Positioning of Physical Object in Dynamic Conditions
3. Experimental Verification
- GPS: L1C/A, L2C, L2E, L5;
- GLONASS: L1C/A, L1P, L2C/A, L2P, L3; SBAS: L1C/A, L5 (for SBAS satellites, which support L5);
- Galileo: E1, E5A, E5B, E5 AltBOC, E61;
- BeiDou: B1, B2, B3;
- QZSS: L1C/A, L1-SAIF, L1C, L2C, L5;
- NavIC (IRNSS): L5;
- Correction services: CenterPoint RTX, OmniSTAR®;
- HP, XP, G2, VBS;
- WAAS, EGNOS, GAGAN, MSAS.
3.1. Results of Static Measurements
- Single receiver—receiver 1;
- Two receivers—receivers 2 and 3;
- Three receivers—receivers 1–3;
- Four receivers—receivers 2–5;
- Five receivers—receivers 1–5.
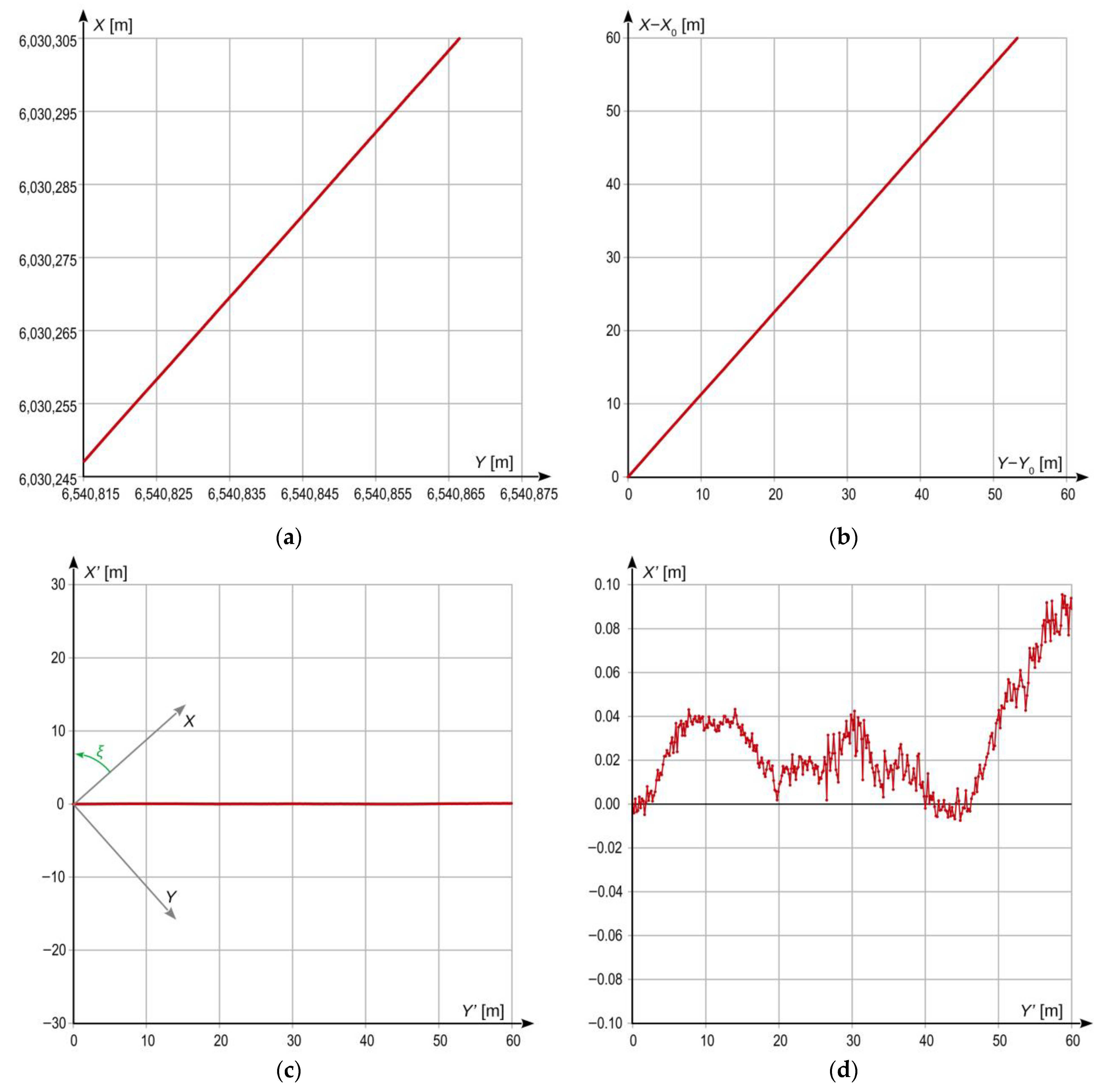
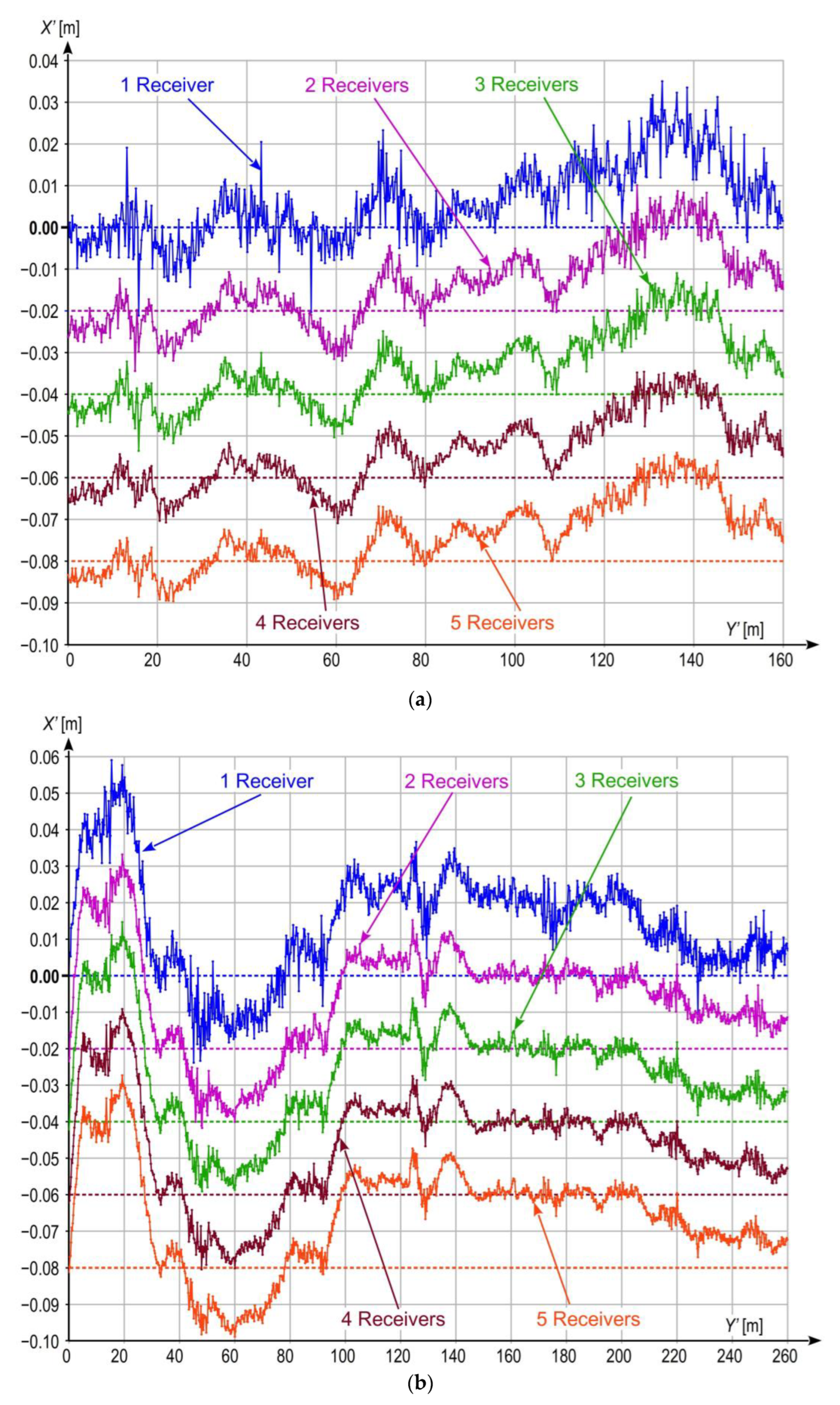
3.2. Results of Measurements Recorded during Bogie Motion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Choi, J.; Hwang, E.; So, H.-Y.; Kim, B. An Uncertainty Evaluation for Multiple Measurements by GUM. Accredit. Qual. Assur. 2003, 8, 13–15. [Google Scholar] [CrossRef]
- Solaguren-Beascoa Fernández, M.; Ortega López, V.; Serrano López, R. On the Uncertainty Evaluation for Repeated Measurements. Mapan 2014, 29, 19–28. [Google Scholar] [CrossRef]
- ISO/IEC Guide 98-3:2008; Uncertainty of Measurement—Part 3: Guide to the Expression of Uncertainty in Measurement. International Organization for Standardization: Geneva, Switzerland, 2008.
- Joint Committee for Guides in Metrology. Guide to the Expression of Uncertainty in Measurement—Part 6: Developing and Using Measurement Models; JCGM GUM-6; Joint Committee for Guides in Metrology: Sèvres, France, 2020. [Google Scholar]
- Vagle, N.; Broumandan, A.; Lachapelle, G. Analysis of Multi-Antenna GNSS Receiver Performance under Jamming Attacks. Sensors 2016, 16, 1937. [Google Scholar] [CrossRef]
- Consoli, A.; Ayadi, J.; Bianchi, G.; Pluchino, S.; Piazza, F.; Baddour, R.; Parés, M.E.; Navarro, J.; Colomina, I.; Gameiro, A.; et al. A multi-antenna approach for UAV’s attitude determination. In Proceedings of the 2015 IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 3–5 June 2015; pp. 401–405. [Google Scholar] [CrossRef]
- Kirkko-Jaakkola, M.; Feng, S.; Xue, Y.; Zhang, X.; Honkala, S.; Söderholm, S.; Ruotsalainen, L.; Ochieng, W.; Kuusniemi, H. Effect of antenna location on GNSS positioning for ITS applications. In Proceedings of the 2016 European Navigation Conference (ENC), Helsinki, Finland, 30 May–2 June 2016; pp. 1–7. [Google Scholar] [CrossRef]
- Judek, S.; Wilk, A.; Koc, W.; Lewiński, L.; Szumisz, A.; Chrostowski, P.; Grulkowski, S.; Szmagliński, J.; Michna, M.; Karwowski, K.; et al. Preparatory Railway Track Geometry Estimation Based on GNSS and IMU Systems. Remote Sens. 2022, 14, 5472. [Google Scholar] [CrossRef]
- Szmagliński, J.; Wilk, A.; Koc, W.; Karwowski, K.; Chrostowski, P.; Skibicki, J.; Grulkowski, S.; Judek, S.; Licow, R.; Makowska-Jarosik, K.; et al. Verification of Satellite Railway Track Position Measurements Making Use of Standard Coordinate Determination Techniques. Remote Sens. 2022, 14, 1855. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, Q.; Niu, X. Kinematic Measurement of the Railway Track Centerline Position by GNSS/INS/Odometer Integration. IEEE Access 2019, 7, 157241–157253. [Google Scholar] [CrossRef]
- Glaus, R.; Peels, G.; Muller, U.; Geiger, A. Precise rail track surveying. In GPS World; Advanstar Communications, Incorporated: New York, NY, USA, 2004; Volume 15. [Google Scholar]
- Guo, J.; Xu, X.; Zhao, Q.; Liu, J. Precise Orbit Determination for Quad-Constellation Satellites at Wuhan University: Strategy, Result Validation, and Comparison. J. Geod. 2016, 90, 143–159. [Google Scholar] [CrossRef]
- Liu, J.; Cai, B.; Wang, J. Track-Constrained GNSS/Odometer-Based Train Localization Using a Particle Filter. In Proceedings of the 2016 IEEE Intelligent Vehicles Symposium (IV), Gothenburg, Sweden, 19–22 June 2016; pp. 877–882. [Google Scholar] [CrossRef]
- Weston, P.; Roberts, C.; Yeo, G.; Stewart, E. Perspectives on railway track geometry condition monitoring from in-service railway vehicles. Veh. Syst. Dyn. 2015, 53, 1063–1091. [Google Scholar] [CrossRef]
- Irteza, S.; Schäfer, E.; Sgammini, M.; Stephan, R.; Hein, M.A. Four-Element Compact Planar Antenna Array for Robust Satellite Navigation Systems. In Proceedings of the 7th European Conference on Antennas and Propagation (EuCAP), Gothenburg, Sweden, 8–12 April 2013; pp. 21–25. [Google Scholar]
- Marranghelli, E.A.; Ramón López La Valle, G.; Roncagliolo, P.A. A Spatial Signal Processing Review for Practical GNSS Antenna Arrays. In Proceedings of the IEEE Biennial Congress of Argentina (ARGENCON), San Miguel de Tucuman, Argentina, 6–8 June 2018; pp. 1–8. [Google Scholar] [CrossRef]
- Huang, L.; Lu, Z.; Xiao, Z.; Ren, C.; Song, J.; Li, B. Suppression of Jammer Multipath in GNSS Antenna Array Receiver. Remote Sens. 2022, 14, 350. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, F.; Lu, Z.; Wang, F. Anti-Jamming Method and Implementation for GNSS Receiver Based on Array Antenna Rotation. Remote Sens. 2022, 14, 4774. [Google Scholar] [CrossRef]
- Roberts, G.W.; Cosser, E.; Meng, X.; Dodson, A. High Frequency Deflection Monitoring of Bridges by GPS. J. Glob. Position. Syst. 2004, 3, 226–231. [Google Scholar] [CrossRef]
- Meng, X.; Dodson, A.H.; Roberts, G.W. Detecting Bridge Dynamics with GPS and Triaxial Accelerometers. Eng. Struct. 2007, 29, 3178–3184. [Google Scholar] [CrossRef]
- Stiros, S.C.; Psimoulis, P.A. Response of a Historical Short-Span Railway Bridge to Passing Trains: 3-D Deflections and Dominant Frequencies Derived from Robotic Total Station (RTS) Measurements. Eng. Struct. 2012, 45, 362–371. [Google Scholar] [CrossRef]
- Yu, J.; Meng, X.; Shao, X.; Yan, B.; Yang, L. Identification of Dynamic Displacements and Modal Frequencies of a Medium-Span Suspension Bridge Using Multimode GNSS Processing. Eng. Struct. 2014, 81, 432–443. [Google Scholar] [CrossRef]
- Bezcioglu, M.; Karadeniz, B.; Yigit, C.; Dindar, A.; Tiryakioglu, I.; Aktug, B. Real-time precise point positioning (RT-PPP) for capturing seismic waveform and coseismic displacement. In Proceedings of the 6th International Conference on Earthquake Engineering and Seismology, Gebze, Türkiye, 13–15 October 2021. [Google Scholar]
- Douklias, A.; Karagiannidis, L.; Misichroni, F.; Amditis, A. Design and Implementation of a UAV-Based Airborne Computing Platform for Computer Vision and Machine Learning Applications. Sensors 2022, 22, 2049. [Google Scholar] [CrossRef]
- Nex, F.; Armenakis, C.; Cramer, M.; Cucci, D.A.; Gerke, M.; Honkavaara, E.; Kukko, A.; Persello, C.; Skaloud, J. UAV in the advent of the twenties: Where we stand and what is next. ISPRS J. Photogramm. Remote Sens. 2022, 184, 215–242. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Lippitt, C.; Zhang, S. The impact of small unmanned airborne platforms on passive optical remote sensing: A conceptual perspective. Int. J. Remote Sens. 2018, 39, 4852–4868. [Google Scholar] [CrossRef]
- Hossain, M.S.; Irtija, N.; Tsiropoulou, E.E.; Plusquellic, J.; Papavassiliou, S. Reconfigurable Intelligent Surfaces enabling Positioning, Navigation, and Timing Services. In Proceedings of the ICC 2022—IEEE International Conference on Communications, Seoul, Republic of Korea, 16–20 May 2022; pp. 4625–4630. [Google Scholar] [CrossRef]
- Akpinar, B.; Gulal, E. Multisensor Railway Track Geometry Surveying System. IEEE Trans. Instrum. Meas. 2012, 61, 190–197. [Google Scholar] [CrossRef]
- Cai, B.; Wu, B.; Lu, D. Survey of Performance Evaluation Standardization and Research Methods on GNSS-Based Localization for Railways. Chin. J. Electron. 2020, 29, 22–33. [Google Scholar] [CrossRef]
- Cai, B.; Zhu, Q.; Shangguan, W.; Liu, D.; Jiang, W.; Wang, J. Key Technology and Application of Autonomous Sensing for Train Control System with Adjustable Dynamic Interval. Beijing Jiaotong Daxue Xuebao = J. Beijing Jiaotong Univ. 2019, 43, 31–41. [Google Scholar] [CrossRef]
- Lau, L.; Cross, P.; Steen, M. Flight Tests of Error-Bounded Heading and Pitch Determination with Two GPS Receivers. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 388–404. [Google Scholar] [CrossRef]
- Wilk, A.; Koc, W.; Specht, C.; Judek, S.; Karwowski, K.; Chrostowski, P.; Czaplewski, K.; Dabrowski, P.S.; Grulkowski, S.; Licow, R.; et al. Digital Filtering of Railway Track Coordinates in Mobile Multi–Receiver GNSS Measurements. Sensors 2020, 20, 5018. [Google Scholar] [CrossRef] [PubMed]
- Magiera, W.; Vārna, I.; Mitrofanovs, I.; Silabrieds, G.; Krawczyk, A.; Skorupa, B.; Apollo, M.; Maciuk, K. Accuracy of Code GNSS Receivers under Various Conditions. Remote Sens. 2022, 14, 2615. [Google Scholar] [CrossRef]
- Piña-García, C.A.; Gu, D.; Siqueiros-García, J.M.; Carreón, G.; Gershenson, C. Exploring Dynamic Environments Using Stochastic Search Strategies. arXiv 2016, arXiv:1602.03247. [Google Scholar] [CrossRef]
- Specht, M. Statistical Distribution Analysis of Navigation Positioning System Errors—Issue of the Empirical Sample Size. Sensors 2020, 20, 7144. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. of Receiver | Standard Deviation | ||
|---|---|---|---|
| σY [mm] | σX [mm] | [mm] | |
| 1 | 1.46 | 2.64 | 3.02 |
| 2 | 1.01 | 1.64 | 1.93 |
| 3 | 1.44 | 2.08 | 2.53 |
| 4 | 1.77 | 3.18 | 3.64 |
| 5 | 1.35 | 2.98 | 3.27 |
| Number of GNSS Receivers | Standard Deviation | Reduction of Resultant Standard Deviation as Compared to One Receiver [%] | ||||||
|---|---|---|---|---|---|---|---|---|
| σY [mm] | σX [mm] | [mm] | ||||||
| Theoretical | Real | Theoretical | Real | Theoretical | Real | Theoretical | Real | |
| 1 | 1.41 | 1.46 | 2.50 | 2.64 | 2.87 | 3.02 | 0.00 | 0.00 |
| 2 | 1.00 | 0.93 | 1.77 | 1.38 | 2.03 | 1.67 | 29.29 | 44.80 |
| 3 | 0.81 | 0.73 | 1.45 | 1.33 | 1.66 | 1.52 | 42.26 | 49.65 |
| 4 | 0.70 | 0.69 | 1.25 | 1.34 | 1.44 | 1.50 | 50.00 | 50.14 |
| 5 | 0.63 | 0.64 | 1.12 | 1.27 | 1.29 | 1.42 | 55.28 | 52.85 |
| Number of GNSS Receivers | Standard Deviation σ along X’-axis [mm] | Standard Deviation Reduction as Compared to one Receiver [%] | |||||
|---|---|---|---|---|---|---|---|
| Section 1 | Section 2 | Section 3 | Section 1 | Section 2 | Section 3 | Average | |
| 1 | 3.97 | 3.22 | 10.46 | 0.00 | 0.00 | 0.00 | 0.00 |
| 2 | 2.14 | 1.85 | 5.67 | 46.21 | 43.47 | 45.81 | 45.16 |
| 3 | 1.95 | 1.70 | 5.23 | 51.04 | 47.21 | 50.03 | 49.43 |
| 4 | 1.65 | 1.53 | 4.67 | 58.54 | 52.50 | 55.41 | 55.48 |
| 5 | 1.56 | 1.45 | 4.20 | 60.70 | 54.87 | 59.88 | 58.48 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Skibicki, J.; Wilk, A.; Koc, W.; Licow, R.; Szmagliński, J.; Chrostowski, P.; Judek, S.; Karwowski, K.; Grulkowski, S. Reducing the Uncertainty of the Moving Object Location Measurement with the Method of Quasi-Multiple Measurement in GNSS Technology in Symmetrical Arrangement. Sensors 2023, 23, 2657. https://doi.org/10.3390/s23052657
Skibicki J, Wilk A, Koc W, Licow R, Szmagliński J, Chrostowski P, Judek S, Karwowski K, Grulkowski S. Reducing the Uncertainty of the Moving Object Location Measurement with the Method of Quasi-Multiple Measurement in GNSS Technology in Symmetrical Arrangement. Sensors. 2023; 23(5):2657. https://doi.org/10.3390/s23052657
Chicago/Turabian StyleSkibicki, Jacek, Andrzej Wilk, Władysław Koc, Roksana Licow, Jacek Szmagliński, Piotr Chrostowski, Slawomir Judek, Krzysztof Karwowski, and Sławomir Grulkowski. 2023. "Reducing the Uncertainty of the Moving Object Location Measurement with the Method of Quasi-Multiple Measurement in GNSS Technology in Symmetrical Arrangement" Sensors 23, no. 5: 2657. https://doi.org/10.3390/s23052657
APA StyleSkibicki, J., Wilk, A., Koc, W., Licow, R., Szmagliński, J., Chrostowski, P., Judek, S., Karwowski, K., & Grulkowski, S. (2023). Reducing the Uncertainty of the Moving Object Location Measurement with the Method of Quasi-Multiple Measurement in GNSS Technology in Symmetrical Arrangement. Sensors, 23(5), 2657. https://doi.org/10.3390/s23052657