


Improving BLE-Based Passive Human Sensing with Deep Learning



Abstract
1. Introduction
- Is capable of working in noisy environments and in proximity to other wireless communication technologies, such as WiFi, thanks to its Adaptive Frequency Hopping (AFH) mechanism [23];
- Is integrated into most of portable devices (such as tablets, smartphones, PDAs, etc.);
- Is energy efficient;
- Allows for simple and flexible deployment in business, industrial and home environments, as BLE devices are small, minimally invasive and less expensive than other solutions;
- Provides an indoor communication range of approximately 20–30 m, depending on the specific device and the characteristics of the environment [24]. As a consequence, the BLE probability of interfering with other networks working in proximity is significantly lower.
- It is difficult to obtain RSSI samples at high rates from BLE-based devices; therefore, the ability of a BLE-based PHS system to match the dynamics of human activities and gestures may be insufficient for some applications [26];
- The BLE protocol does not allow the application layer to know the current transmission frequency, that is, the PHS application has no legal (i.e., compliant with the protocol) way to extract the frequency selected by the AFH mechanism to transmit a specific message. This is a security-related constraint, so it will not be relaxed anytime soon;
- The WiFi CSI can be obtained directly from some devices through the WiFi multicarrier encoding mechanism, whereas BLE does not natively support such a measurement.
- A PHS architecture for human detection based on standard BLE 4.x Commercial-Off-The-Shelf (COTS) devices that does not impose strong restrictions, such as direct Line-Of-Sight (LoS) visibility, on the position of the sensed occupants in the monitored environment. The transmitting devices are common BLE stand-alone beacons, which do not require any additional communication connection to external computational resources and can be battery-operated. The receiving device can be built on Arduino Zero or Raspberry Pi cards, equipped with their BLE onboard adapter;
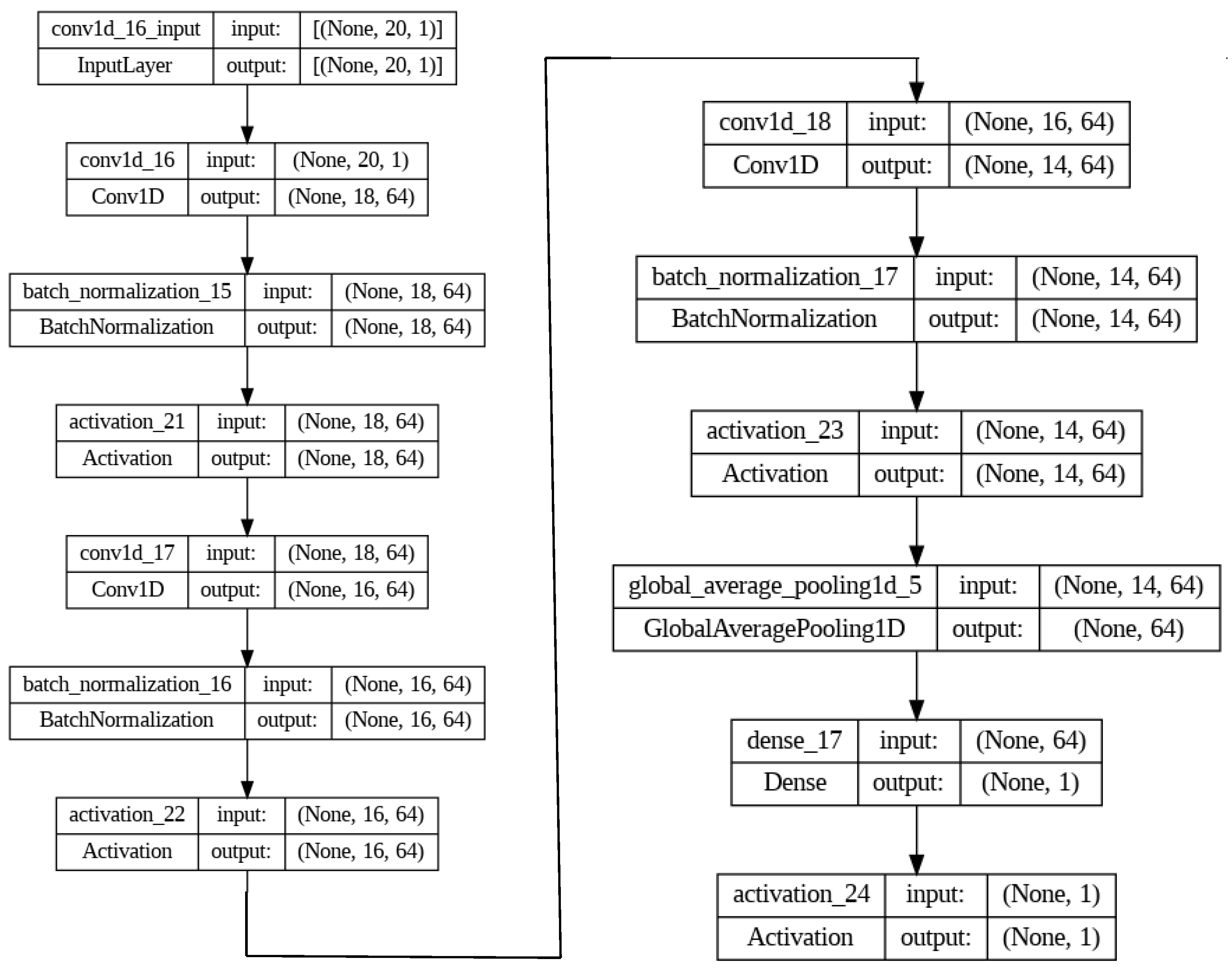
- A Deep Convolutional Neural Network to analyze the sequence of RSSI samples captured by the BLE receivers and extract the occupancy information of the area covered by the BLE sensing network. Our approach is novel compared to previous work, which adopted Long Short-term Memory (LSTM) networks [32];
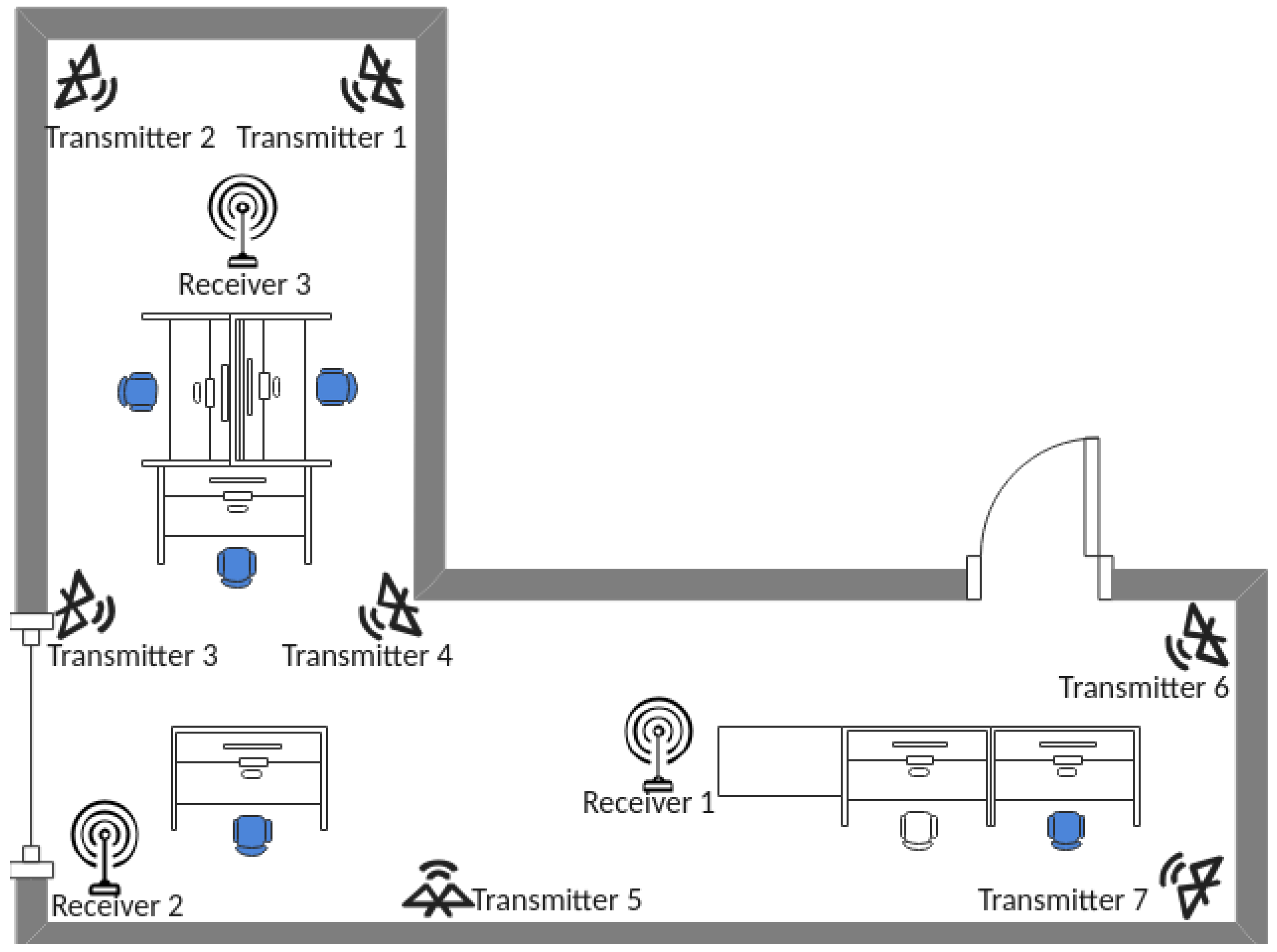
- An assessment of the proposed architecture in a real-life environment, that is, a student laboratory where occupants are free to move in and out. The room was not rectangular but L-shaped with several non-LoS regions with respect to the BLE receivers, and the environment was polluted by RF noise due to several WiFi and Bluetooth operating devices that were randomly moved in and out of the room by the students;
- A comparison of the proposed approach with the one in the literature that offers the best performance [27].
2. Materials and Methods
3. Results
4. Discussion
- The shape of the laboratory is concave, so some receiver/beacon couples are not in direct LoS;
- The laboratory is used for research and not for lecturing, so the number of occupants and the entrance and exit times are not fixed;
- The number of occupants is generally small, i.e., from zero to five, therefore the RSSI variation due to the presence of occupants in the laboratory can be very small;
- Computers and other transmitting devices pollute the BLE transmission frequencies, thus triggering the BLE Frequency Hopping mechanism frequently;
- The beacons and the receivers were positioned according to general illumination considerations and not taking into account the expected location of the occupants.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Youssef, M.; Mah, M.; Agrawala, A. Challenges: Device-Free Passive Localization for Wireless Environments. In Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking (MobiCom’07), New York, NY, USA, 3–7 October 2007; Association for Computing Machinery: New York, NY, USA, 2007; pp. 222–229. [Google Scholar] [CrossRef]
- Woyach, K.; Puccinelli, D.; Haenggi, M. Sensorless Sensing in Wireless Networks: Implementation and Measurements. In Proceedings of the International Symposium on Modeling and Optimization in Mobile, Ad Hoc and Wireless Networks, Ottawa, ON, Canada, 17–19 August 2006; pp. 1–8. [Google Scholar] [CrossRef]
- Yang, T.; Cabani, A.; Chafouk, H. A Survey of Recent Indoor Localization Scenarios and Methodologies. Sensors 2021, 21, 8086. [Google Scholar] [CrossRef] [PubMed]
- Carvalho, D.F.; Depari, A.; Ferrari, P.; Flammini, A.; Rinaldi, S.; Sisinni, E. On the feasibility of mobile sensing and tracking applications based on LPWAN. In Proceedings of the 2018 IEEE Sensors Applications Symposium (SAS), Seoul, Republic of Korea, 12–14 March 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Lei, Q.; Du, J.X.; Zhang, H.B.; Ye, S.; Chen, D.S. A Survey of Vision-Based Human Action Evaluation Methods. Sensors 2019, 19, 4129. [Google Scholar] [CrossRef] [PubMed]
- Iannizzotto, G.; Lo Bello, L.; Patti, G. Personal Protection Equipment detection system for embedded devices based on DNN and Fuzzy Logic. Expert Syst. Appl. 2021, 184, 115447. [Google Scholar] [CrossRef]
- Aggarwal, J.; Ryoo, M. Human Activity Analysis: A Review. ACM Comput. Surv. 2011, 43, 1–43. [Google Scholar] [CrossRef]
- Iannizzotto, G.; La Rosa, F. Competitive combination of multiple eye detection and tracking techniques. IEEE Trans. Ind. Electron. 2011, 58, 3151–3159. [Google Scholar] [CrossRef]
- Hussain, Z.; Sheng, Q.Z.; Zhang, W.E. A review and categorization of techniques on device-free human activity recognition. J. Netw. Comput. Appl. 2020, 167, 102738. [Google Scholar] [CrossRef]
- Iannizzotto, G.; Nucita, A.; Fabio, R.A.; Caprì, T.; Lo Bello, L. More Intelligence and Less Clouds in Our Smart Homes. In Economic and Policy Implications of Artificial Intelligence; Marino, D., Monaca, M.A., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 123–136. [Google Scholar] [CrossRef]
- Battaglia, F.; Iannizzotto, G.; Lo Bello, L. A Person Authentication System Based on RFID Tags and a Cascade of Face Recognition Algorithms. IEEE Trans. Circuits Syst. Video Technol. 2017, 27, 1676–1690. [Google Scholar] [CrossRef]
- Battaglia, F.; Iannizzotto, G.; Lo Bello, L. A biometric authentication system based on face recognition and rfid tags. Mondo Digit. 2014, 13, 340–346. [Google Scholar]
- Zhou, Z.; Wu, C.; Yang, Z.; Liu, Y. Sensorless sensing with WiFi. Tsinghua Sci. Technol. 2015, 20, 1–6. [Google Scholar] [CrossRef]
- Long, Y.; Zhou, M.; Zhang, Z.; Nie, W. CSI Ranging-based Wi-Fi Indoor Localization Error Analysis. In Proceedings of the 2021 13th International Conference on Wireless Communications and Signal Processing (WCSP), Online, 20–22 October 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Yang, Z.; Zhou, Z.; Liu, Y. From RSSI to CSI: Indoor Localization via Channel Response. ACM Comput. Surv. 2013, 46, 1–32. [Google Scholar] [CrossRef]
- Ma, Y.; Zhou, G.; Wang, S. WiFi Sensing with Channel State Information: A Survey. ACM Comput. Surv. 2019, 52, 1–36. [Google Scholar] [CrossRef]
- Soto, J.C.; Galdino, I.; Caballero, E.; Ferreira, V.; Muchaluat-Saade, D.; Albuquerque, C. A survey on vital signs monitoring based on Wi-Fi CSI data. Comput. Commun. 2022, 195, 99–110. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Wu, D.; Niu, K.; Wang, X.; Zhang, F.; Yao, J.; Jiang, D.; Qin, F. Practical Issues and Challenges in CSI-based Integrated Sensing and Communication. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Foshan, China, 11–13 August 2022; pp. 836–841. [Google Scholar] [CrossRef]
- Fedullo, T.; Tramarin, F.; Vitturi, S. The Impact of Rate Adaptation Algorithms on Wi-Fi-Based Factory Automation Systems. Sensors 2020, 20, 5195. [Google Scholar] [CrossRef] [PubMed]
- Lo Bello, L.; Ashjaei, M.; Patti, G.; Behnam, M. Schedulability analysis of Time-Sensitive Networks with scheduled traffic and preemption support. J. Parallel Distrib. Comput. 2020, 144, 153–171. [Google Scholar] [CrossRef]
- Huang, B.; Liu, J.; Sun, W.; Yang, F. A Robust Indoor Positioning Method based on Bluetooth Low Energy with Separate Channel Information. Sensors 2019, 19, 3487. [Google Scholar] [CrossRef]
- Iannizzotto, G.; Milici, M.; Nucita, A.; Lo Bello, L. A Perspective on Passive Human Sensing with Bluetooth. Sensors 2022, 22, 3523. [Google Scholar] [CrossRef]
- Woolley, M. Understanding Reliability in Bluetooth Technology. Available online: https://www.bluetooth.com/wp-content/uploads/2020/10/EN-Understanding_Reliability.pdf (accessed on 1 December 2022).
- Hortelano, D.; Olivares, T.; Ruiz, M.C.; Garrido-Hidalgo, C.; López, V. From Sensor Networks to Internet of Things. Bluetooth Low Energy, a Standard for This Evolution. Sensors 2017, 17, 372. [Google Scholar] [CrossRef]
- Shen, Y.; Hwang, B.; Jeong, J.P. Particle Filtering-Based Indoor Positioning System for Beacon Tag Tracking. IEEE Access 2020, 8, 226445–226460. [Google Scholar] [CrossRef]
- Ramirez, R.; Huang, C.Y.; Liao, C.A.; Lin, P.T.; Lin, H.W.; Liang, S.H. A Practice of BLE RSSI Measurement for Indoor Positioning. Sensors 2021, 21, 5181. [Google Scholar] [CrossRef]
- Münch, M.; Huffstadt, K.; Schleif, F. Towards a device-free passive presence detection system with Bluetooth Low Energy beacons. In Proceedings of the 27th European Symposium on Artificial Neural Networks, ESANN 2019, Bruges, Belgium, 24–26 April 2019. [Google Scholar]
- Münch, M.; Schleif, F.M. Device-Free Passive Human Counting with Bluetooth Low Energy Beacons. In Advances in Computational Intelligence; Rojas, I., Joya, G., Catala, A., Eds.; Springer International Publishing: Cham, Switzerland, 2019; pp. 799–810. [Google Scholar] [CrossRef]
- Brockmann, F.; Figura, R.; Handte, M.; Marrón, P.J. RSSI Based Passive Detection of Persons for Waiting Lines Using Bluetooth Low Energy. In Proceedings of the 2018 International Conference on Embedded Wireless Systems and Networks (EWSN’18), Madrid, Spain, 14–16 February 2018; Junction Publishing: Junction, TX, USA, 2018; pp. 102–113. [Google Scholar]
- Feng, C.; Arshad, S.; Liu, Y. MAIS: Multiple Activity Identification System Using Channel State Information of WiFi Signals. In Wireless Algorithms, Systems, and Applications; Ma, L., Khreishah, A., Zhang, Y., Yan, M., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 419–432. [Google Scholar]
- Beato Gutiérrez, M.E.; Sánchez, M.M.; Berjón Gallinas, R.; Fermoso García, A.M. Capacity Control in Indoor Spaces Using Machine Learning Techniques Together with BLE Technology. J. Sens. Actuator Netw. 2021, 10, 35. [Google Scholar] [CrossRef]
- Billah, M.F.R.M.; Saoda, N.; Gao, J.; Campbell, B. BLE Can See: A Reinforcement Learning Approach for RF-Based Indoor Occupancy Detection. In Proceedings of the 20th International Conference on Information Processing in Sensor Networks (Co-Located with CPS-IoT Week 2021) (IPSN’21), Nashville, TN, USA, 18–21 May 2021; Association for Computing Machinery: New York, NY, USA, 2021; pp. 132–147. [Google Scholar] [CrossRef]
- Demrozi, F.; Chiarani, F.; Turetta, C.; Kindt, P.H.; Pravadelli, G. Estimating Indoor Occupancy Through Low-Cost BLE Devices. IEEE Sens. J. 2021, 21, 17053–17063. [Google Scholar] [CrossRef]
- Faragher, R.; Harle, R. Location Fingerprinting with Bluetooth Low Energy Beacons. IEEE J. Sel. Areas Commun. 2015, 33, 2418–2428. [Google Scholar] [CrossRef]
- Gentner, C.; Günther, D.; Kindt, P.H. Identifying the BLE Advertising Channel for Reliable Distance Estimation on Smartphones. IEEE Access 2020, 10, 9563–9575. [Google Scholar] [CrossRef]
- Fink, A.; Beikirch, H.; Voß, M.; Schröder, C. RSSI-based indoor positioning using diversity and Inertial Navigation. In Proceedings of the 2010 International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 1–7. [Google Scholar] [CrossRef]
- Song, H.; Kim, M.; Park, D.; Lee, J.G. Prestopping: How Does Early Stopping Help Generalization against Label Noise? arXiv 2019, arXiv:1911.08059. [Google Scholar]
- Koutris, A.; Siozos, T.; Kopsinis, Y.; Pikrakis, A.; Merk, T.; Mahlig, M.; Papaharalabos, S.; Karlsson, P. Deep Learning-Based Indoor Localization Using Multi-View BLE Signal. Sensors 2022, 22, 2759. [Google Scholar] [CrossRef]
- Pau, G.; Arena, F.; Gebremariam, Y.E.; You, I. Bluetooth 5.1: An Analysis of Direction Finding Capability for High-Precision Location Services. Sensors 2021, 21, 3589. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Approach | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|
| SVM-LK | 0.9682 | 1.00 | 0.94 | 0.97 |
| LSTM | 0.9819 | 0.98 | 0.98 | 0.98 |
| our approach | 0.9974 | 1.00 | 1.00 | 1.00 |
| Avail. Devs. | Approach | Accuracy | Precision | Recall | F1-Score |
|---|---|---|---|---|---|
| All beacons, r1 & r3 | SVM-LK | 0.6508 | 0.74 | 0.46 | 0.57 |
| LSTM | 0.9771 | 0.98 | 0.98 | 0.98 | |
| our approach | 0.9886 | 0.99 | 0.99 | 0.99 | |
| All beacons, only r2 | SVM-LK | 0.7698 | 0.93 | 0.59 | 0.72 |
| LSTM | 0.9635 | 0.96 | 0.96 | 0.96 | |
| our approach | 0.9713 | 0.97 | 0.97 | 0.97 | |
| All beacons, only r1 | SVM-LK | 0.6905 | 0.79 | 0.52 | 0.63 |
| LSTM | 0.9615 | 0.96 | 0.96 | 0.96 | |
| our approach | 0.9713 | 0.97 | 0.97 | 0.97 | |
| b1, b2, b6, b7, r1 & r3 | SVM-LK | 0.5556 | 0.57 | 0.48 | 0.52 |
| LSTM | 0.9559 | 0.96 | 0.95 | 0.96 | |
| our approach | 0.9669 | 0.97 | 0.97 | 0.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iannizzotto, G.; Lo Bello, L.; Nucita, A. Improving BLE-Based Passive Human Sensing with Deep Learning. Sensors 2023, 23, 2581. https://doi.org/10.3390/s23052581
Iannizzotto G, Lo Bello L, Nucita A. Improving BLE-Based Passive Human Sensing with Deep Learning. Sensors. 2023; 23(5):2581. https://doi.org/10.3390/s23052581
Chicago/Turabian StyleIannizzotto, Giancarlo, Lucia Lo Bello, and Andrea Nucita. 2023. "Improving BLE-Based Passive Human Sensing with Deep Learning" Sensors 23, no. 5: 2581. https://doi.org/10.3390/s23052581
APA StyleIannizzotto, G., Lo Bello, L., & Nucita, A. (2023). Improving BLE-Based Passive Human Sensing with Deep Learning. Sensors, 23(5), 2581. https://doi.org/10.3390/s23052581