
Characterizing Ambient Seismic Noise in an Urban Park Environment

Abstract
1. Introduction
2. Materials and Methods
2.1. Description of Field Data
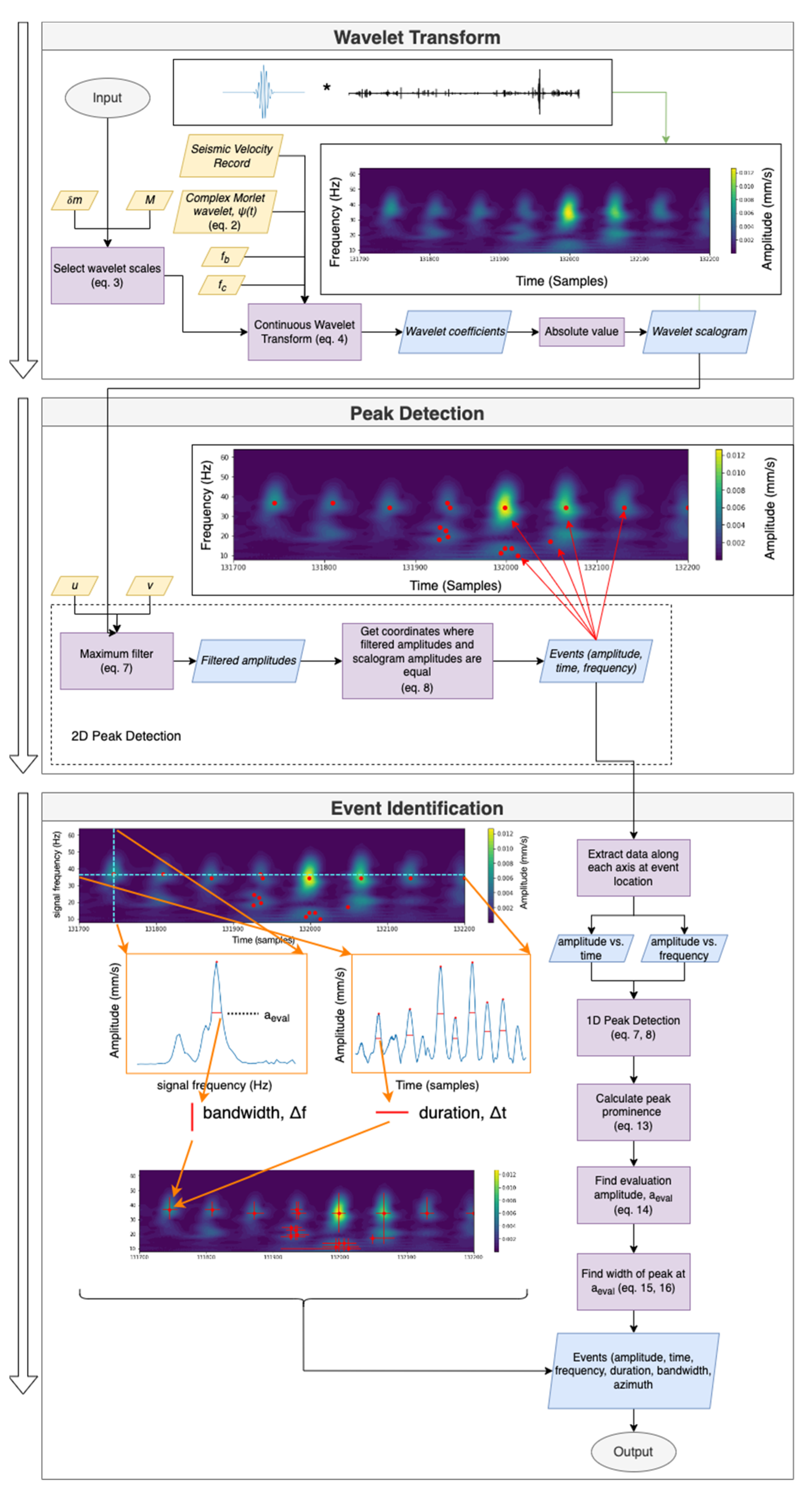
2.2. Processing Methodology for Event Identification
2.2.1. Continuous Wavelet Transform
2.2.2. Peak Detection
2.2.3. Event Characterization
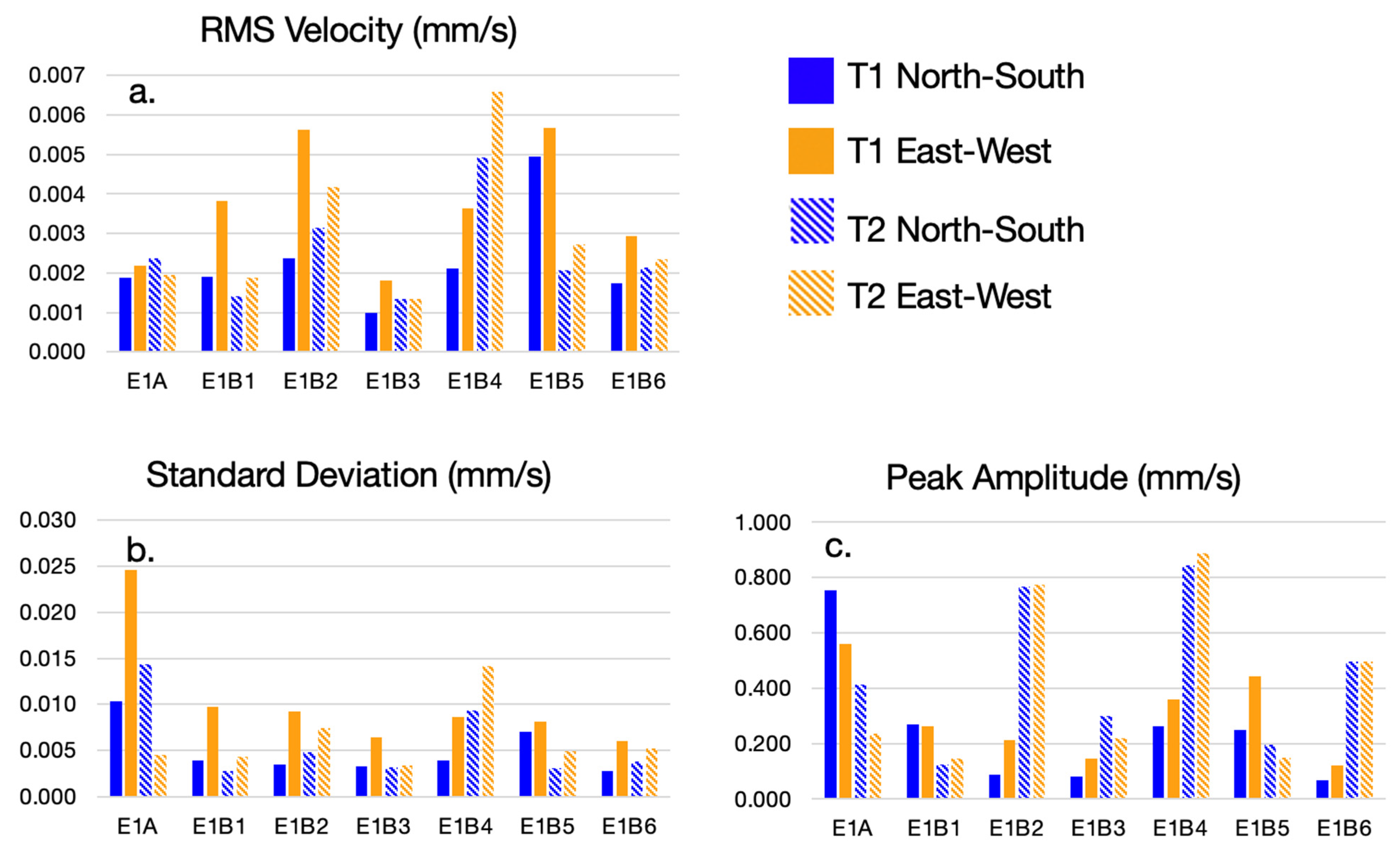
3. Results
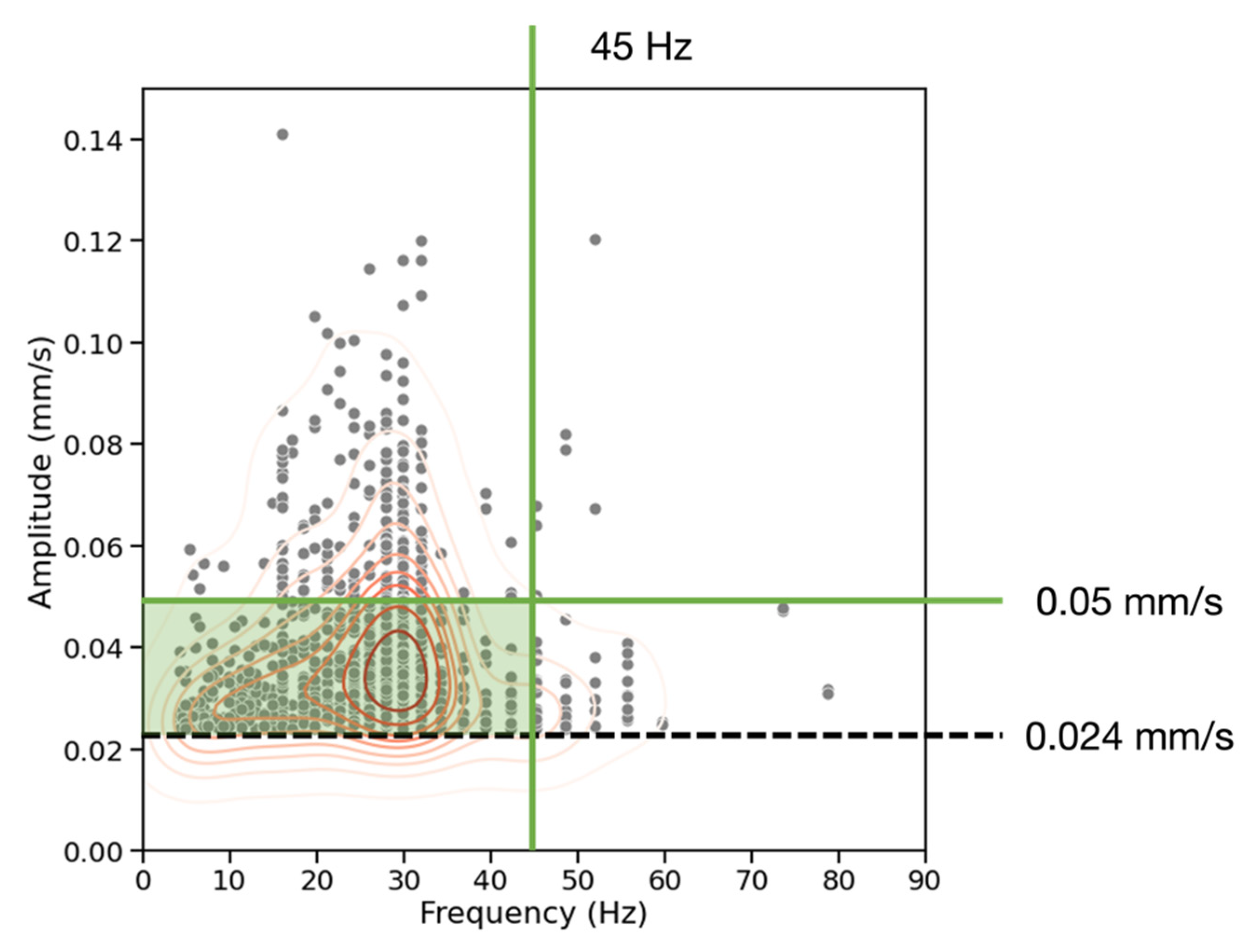
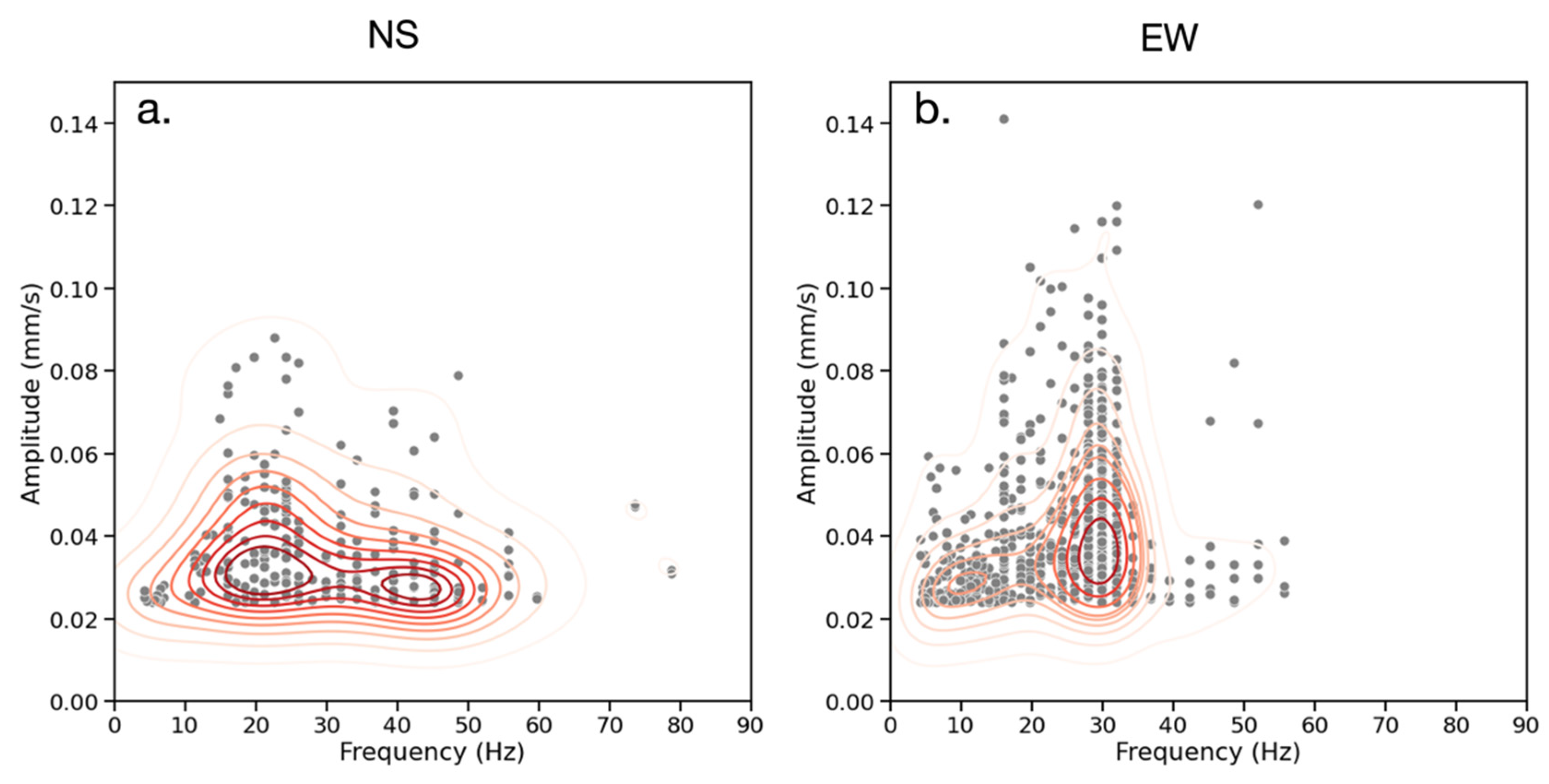
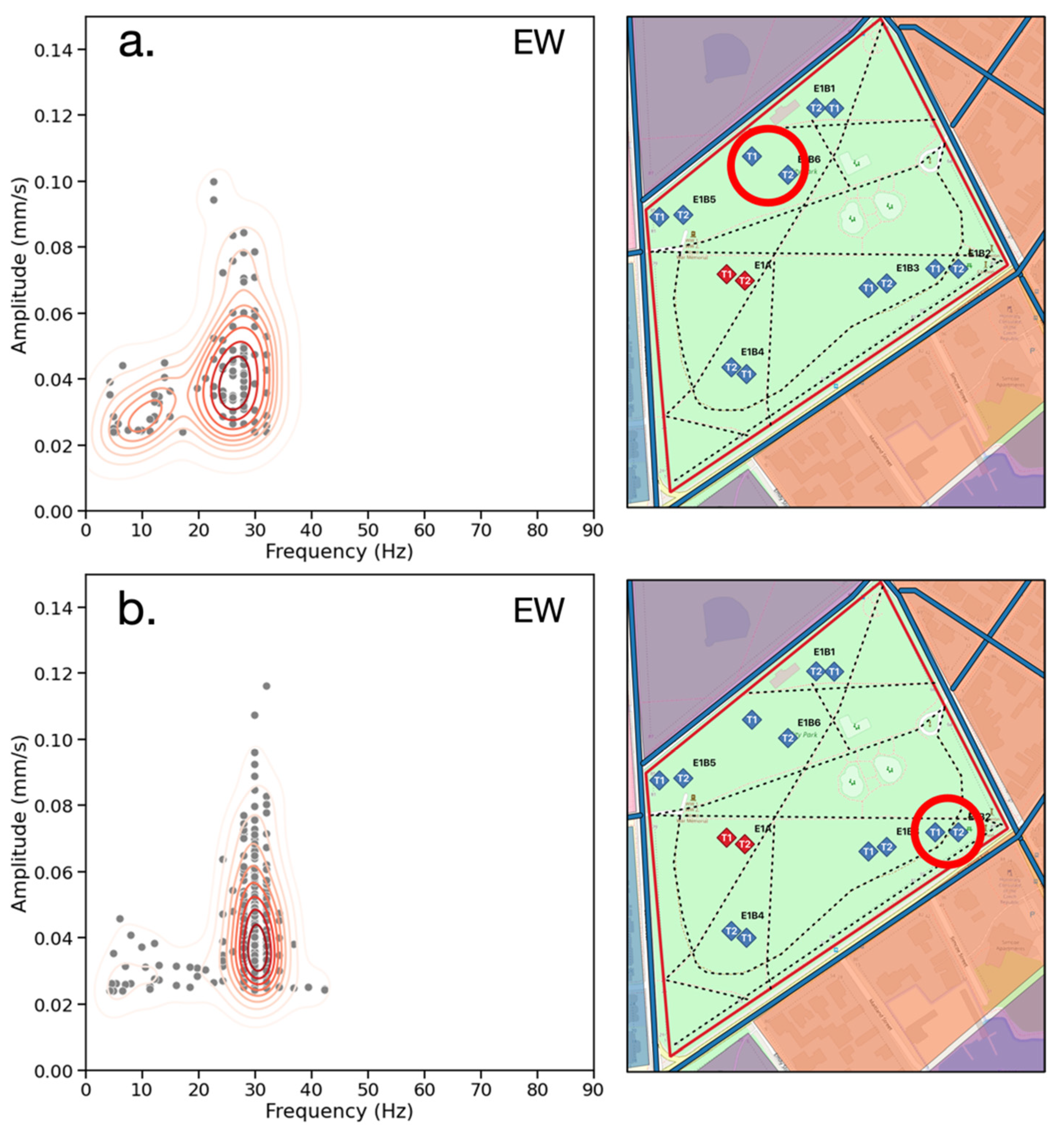
3.1. Frequency vs. Amplitude
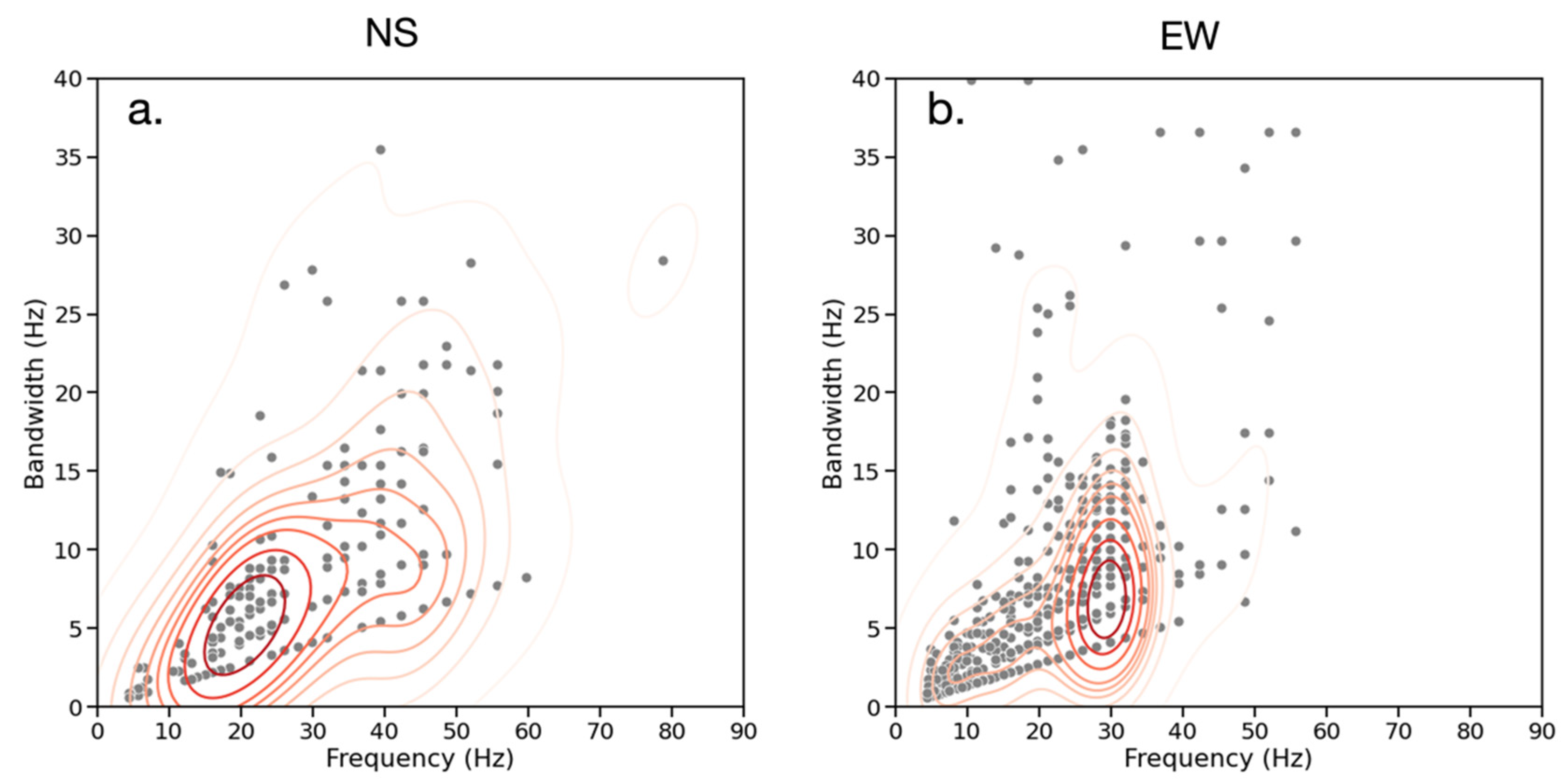
3.2. Frequency vs. Bandwidth
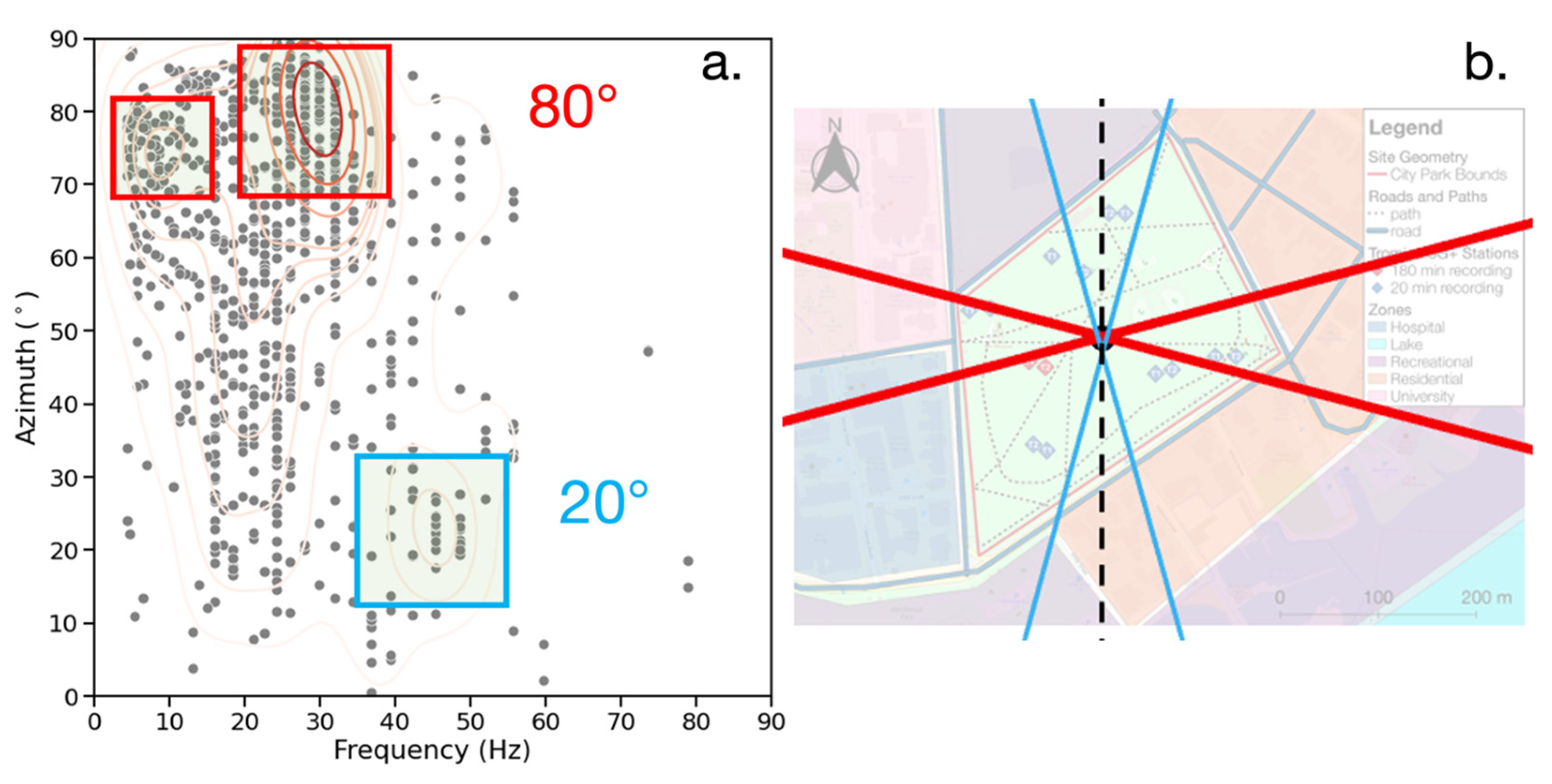
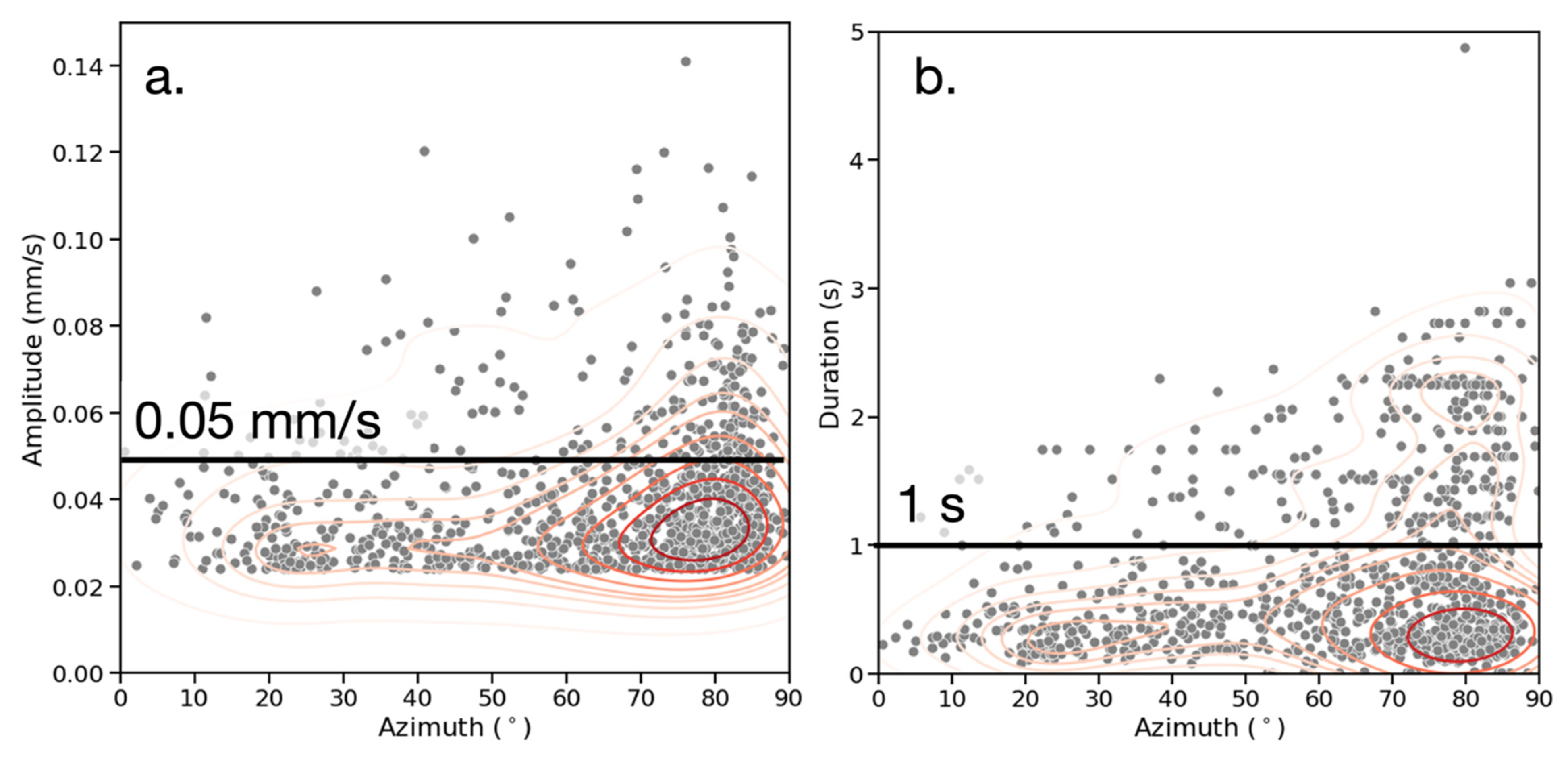
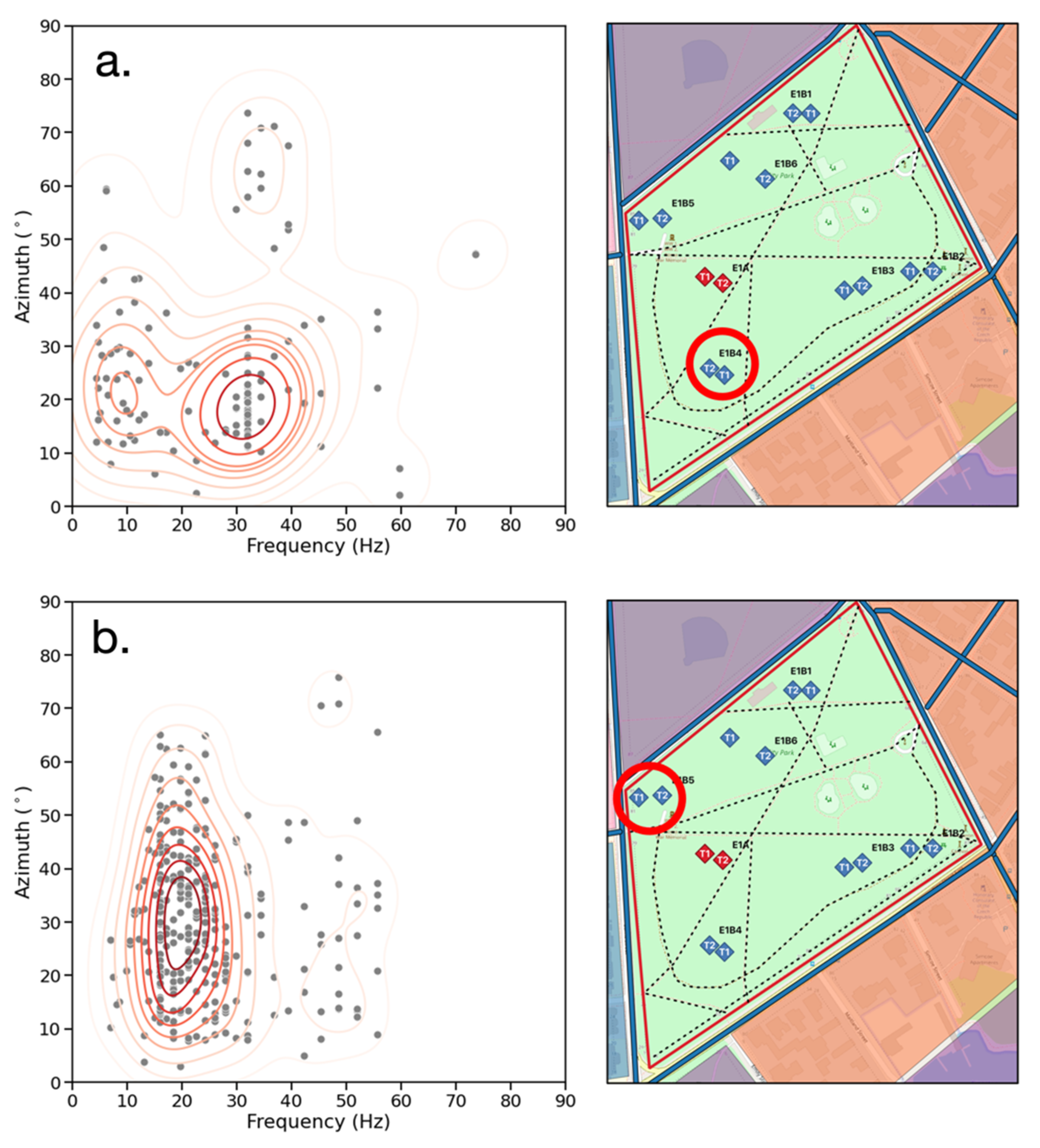
3.3. Event Azimuth
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Stein, S.; Wysession, M. An Introduction to Seismology, Earthquakes, and Earth Structure; Wiley: Hoboken, NJ, USA, 1991; ISBN 978-0-86542-078-6. [Google Scholar]
- Encyclopedia of Solid Earth Geophysics; Gupta, H.K., Ed.; Encyclopedia of Earth Sciences Series; Springer: Dordrecht, The Netherlands, 2011; ISBN 978-90-481-8701-0. [Google Scholar]
- Foti, S. Surface Wave Methods for Near-Surface Site Characterization; CRC Press: Boca Raton, FL, USA, 2015; ISBN 978-0-415-67876-6. [Google Scholar]
- Anstey, N.A. Correlation Techniques—A Review. Geophys. Prospect. 1964, 12, 355–382. [Google Scholar] [CrossRef]
- Gibbons, S.J.; Ringdal, F. The Detection of Low Magnitude Seismic Events Using Array-Based Waveform Correlation. Geophys. J. Int. 2006, 165, 149–166. [Google Scholar] [CrossRef]
- Michelet, S.; Toksöz, M.N. Fracture Mapping in the Soultz-Sous-Forêts Geothermal Field Using Microearthquake Locations. J. Geophys. Res. Solid Earth 2007, 112, B07315. [Google Scholar] [CrossRef]
- Song, F.; Kuleli, H.S.; Toksöz, M.N.; Ay, E.; Zhang, H. An Improved Method for Hydrofracture-Induced Microseismic Event Detection and Phase Picking. Geophysics 2010, 75, A47–A52. [Google Scholar] [CrossRef]
- Allen, R.V. Automatic Earthquake Recognition and Timing from Single Traces. Bull. Seismol. Soc. Am. 1978, 68, 1521–1532. [Google Scholar] [CrossRef]
- Earle, P.S.; Shearer, P.M. Characterization of Global Seismograms Using an Automatic-Picking Algorithm. Bull. Seismol. Soc. Am. 1994, 84, 366–376. [Google Scholar] [CrossRef]
- Ruud, B.O.; Husebye, E.S. A New Three-Component Detector and Automatic Single-Station Bulletin Production. Bull. Seismol. Soc. Am. 1992, 82, 221–237. [Google Scholar] [CrossRef]
- Li, X.; Shang, X.; Wang, Z.; Dong, L.; Weng, L. Identifying P-Phase Arrivals with Noise: An Improved Kurtosis Method Based on DWT and STA/LTA. J. Appl. Geophys. 2016, 133, 50–61. [Google Scholar] [CrossRef]
- Adly, A.; Poggi, V.; Fäh, D.; Hassoup, A.; Omran, A. Combining Active and Passive Seismic Methods for the Characterization of Urban Sites in Cairo, Egypt. Geophys. J. Int. 2017, 210, 428–442. [Google Scholar] [CrossRef]
- Baglari, D.; Dey, A.; Taipodia, J. A Critical Insight into the Influence of Data Acquisition Parameters on the Dispersion Imaging in Passive Roadside MASW Survey. J. Appl. Geophys. 2020, 183, 104223. [Google Scholar] [CrossRef]
- Cheng, F.; Xia, J.; Xu, Y.; Xu, Z.; Pan, Y. A New Passive Seismic Method Based on Seismic Interferometry and Multichannel Analysis of Surface Waves. J. Appl. Geophys. 2015, 117, 126–135. [Google Scholar] [CrossRef]
- Dal Moro, G. Effective Active and Passive Seismics for the Characterization of Urban and Remote Areas: Four Channels for Seven Objective Functions. Pure Appl. Geophys. 2019, 176, 1445–1465. [Google Scholar] [CrossRef]
- Park, C.B.; Miller, R.D.; Xia, J.; Ivanov, J. Multichannel Analysis of Surface Waves (MASW)—Active and Passive Methods. Lead. Edge 2007, 26, 60–64. [Google Scholar] [CrossRef]
- Roberts, J.C.; Asten, M.W. Resolving a Velocity Inversion at the Geotechnical Scale Using the Microtremor (Passive Seismic) Survey Method. Explor. Geophys. 2004, 35, 14–18. [Google Scholar] [CrossRef]
- Toni, M.; Yokoi, T.; El Rayess, M. Site Characterization Using Passive Seismic Techniques: A Case of Suez City, Egypt. J. Afr. Earth Sci. 2019, 156, 1–11. [Google Scholar] [CrossRef]
- Yoon, S. Combined Active-Passive Surface Wave Measurements at Five Sites in the Western and Southern US. KSCE J. Civ. Eng. 2011, 15, 823–830. [Google Scholar] [CrossRef]
- Mi, B.; Xia, J.; Tian, G.; Shi, Z.; Xing, H.; Chang, X.; Xi, C.; Liu, Y.; Ning, L.; Dai, T.; et al. Near-Surface Imaging from Traffic-Induced Surface Waves with Dense Linear Arrays: An Application in the Urban Area of Hangzhou, China. Geophysics 2022, 87, B145–B158. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Y.E.; Zhang, H.; Ku, T. Near-Surface Site Investigation by Seismic Interferometry Using Urban Traffic Noise in Singapore. Geophysics 2018, 84, B169–B180. [Google Scholar] [CrossRef]
- Bergamo, O.; Pignat, M.; Puca, C. Passive Methods for the Fast Seismic Characterization of Structures: The Case of Silea Bridge. Int. J. Civ. Eng. 2018, 16, 807–822. [Google Scholar] [CrossRef]
- D’Alessandro, A.; Costanzo, A.; Ladina, C.; Buongiorno, F.; Cattaneo, M.; Falcone, S.; La Piana, C.; Marzorati, S.; Scudero, S.; Vitale, G.; et al. Urban Seismic Networks, Structural Health and Cultural Heritage Monitoring: The National Earthquakes Observatory (INGV, Italy) Experience. Front. Built Environ. 2019, 5, 127. [Google Scholar] [CrossRef]
- Pazzi, V.; Lotti, A.; Chiara, P.; Lombardi, L.; Nocentini, M.; Casagli, N. Monitoring of the Vibration Induced on the Arno Masonry Embankment Wall by the Conservation Works after the May 25, 2016 Riverbank Landslide. Geoenviron Disasters 2017, 4, 6. [Google Scholar] [CrossRef]
- Brenguier, F.; Boué, P.; Ben-Zion, Y.; Vernon, F.; Johnson, C.W.; Mordret, A.; Coutant, O.; Share, P.-E.; Beaucé, E.; Hollis, D.; et al. Train Traffic as a Powerful Noise Source for Monitoring Active Faults with Seismic Interferometry. Geophys. Res. Lett. 2019, 46, 9529–9536. [Google Scholar] [CrossRef] [PubMed]
- Chavez-Garcia, F.J.; Natarajan, T.; Cardenas-Soto, M.; Rajendran, K. Landslide Characterization Using Active and Passive Seismic Imaging Techniques: A Case Study from Kerala, India. Nat. Hazards 2021, 105, 1623. [Google Scholar] [CrossRef]
- James, S.R.; Knox, H.A.; Abbott, R.E.; Panning, M.P.; Screaton, E.J. Insights Into Permafrost and Seasonal Active-Layer Dynamics From Ambient Seismic Noise Monitoring. J. Geophys. Res. Earth Surf. 2019, 124, 1798–1816. [Google Scholar] [CrossRef]
- Lindner, F.; Wassermann, J.; Igel, H. Seasonal Freeze-Thaw Cycles and Permafrost Degradation on Mt. Zugspitze (German/Austrian Alps) Revealed by Single-Station Seismic Monitoring. Geophys. Res. Lett. 2021, 48, e2021GL094659. [Google Scholar] [CrossRef]
- Lythgoe, K.H.; Qing, M.O.S.; Wei, S. Large-Scale Crustal Structure Beneath Singapore Using Receiver Functions From a Dense Urban Nodal Array. Geophys. Res. Lett. 2020, 47, e2020GL087233. [Google Scholar] [CrossRef]
- Aggarwal, K.; Mukhopadhyay, S.; Tangirala, A.K. Statistical Characterization and Time-Series Modeling of Seismic Noise. arXiv 2020, arXiv:2009.01549. [Google Scholar]
- Grecu, B.; Neagoe, C.; Tataru, D.; Borleanu, F.; Zaharia, B. Analysis of Seismic Noise in the Romanian-Bulgarian Cross-Border Region. J. Seism. 2018, 22, 1275–1292. [Google Scholar] [CrossRef]
- Groos, J.C.; Ritter, J.R.R. Time Domain Classification and Quantification of Seismic Noise in an Urban Environment. Geophys. J. Int. 2009, 179, 1213–1231. [Google Scholar] [CrossRef]
- Dean, T.; Hasani, M.A. Seismic Noise in an Urban Environment. Lead. Edge 2020, 39, 639–645. [Google Scholar] [CrossRef]
- Díaz, J.; Ruiz, M.; Sánchez-Pastor, P.S.; Romero, P. Urban Seismology: On the Origin of Earth Vibrations within a City. Sci. Rep. 2017, 7, 15296. [Google Scholar] [CrossRef] [PubMed]
- Lecocq, T.; Hicks, S.P.; Van Noten, K.; van Wijk, K.; Koelemeijer, P.; De Plaen, R.S.M.; Massin, F.; Hillers, G.; Anthony, R.E.; Apoloner, M.-T.; et al. Global Quieting of High-Frequency Seismic Noise Due to COVID-19 Pandemic Lockdown Measures. Science 2020, 369, 1338–1343. [Google Scholar] [CrossRef] [PubMed]
- Lindsey, N.J.; Yuan, S.; Lellouch, A.; Gualtieri, L.; Lecocq, T.; Biondi, B. City-Scale Dark Fiber DAS Measurements of Infrastructure Use During the COVID-19 Pandemic. Geophys. Res. Lett. 2020, 47, e2020GL089931. [Google Scholar] [CrossRef]
- Riahi, N.; Gerstoft, P. The Seismic Traffic Footprint: Tracking Trains, Aircraft, and Cars Seismically. Geophys. Res. Lett. 2015, 42, 2674–2681. [Google Scholar] [CrossRef]
- Moho Science & Technology. Tromino 3G+ User’s Manual; Moho Science & Technology: Venice, Italy, 2018. [Google Scholar]
- Yang, Y.; Liu, C.; Langston, C.A. Processing Seismic Ambient Noise Data with the Continuous Wavelet Transform to Obtain Reliable Empirical Green’s Functions. Geophys. J. Int. 2020, 222, 1224–1235. [Google Scholar] [CrossRef]
- Lapins, S.; Roman, D.C.; Rougier, J.; De Angelis, S.; Cashman, K.V.; Kendall, J.-M. An Examination of the Continuous Wavelet Transform for Volcano-Seismic Spectral Analysis. J. Volcanol. Geotherm. Res. 2020, 389, 106728. [Google Scholar] [CrossRef]
- Torrence, C.; Compo, G.P. A Practical Guide to Wavelet Analysis. Bull. Am. Meteor. Soc. 1998, 79, 61–78. [Google Scholar] [CrossRef]
- Azzara, R.M.; Girardi, M.; Iafolla, V.; Padovani, C.; Pellegrini, D. Long-Term Dynamic Monitoring of Medieval Masonry Towers. Front. Built Environ. 2020, 6, 9. [Google Scholar] [CrossRef]
- Pérez-Campos, X.; Espíndola, V.H.; González-Ávila, D.; Zanolli Fabila, B.; Márquez-Ramírez, V.H.; De Plaen, R.S.M.; Montalvo-Arrieta, J.C.; Quintanar, L. The Effect of Confinement Due to COVID-19 on Seismic Noise in Mexico. Solid Earth 2021, 12, 1411–1419. [Google Scholar] [CrossRef]
- Bin, K.; Lin, J.; Tong, X.; Zhang, X.; Wang, J.; Luo, S. Moving Target Recognition with Seismic Sensing: A Review. Measurement 2021, 181, 109584. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, Y.E.; Nilot, E.; Fang, G. Urban Running Activity Detected Using a Seismic Sensor during COVID-19 Pandemic. Seismol. Res. Lett. 2021, 93, 181–192. [Google Scholar] [CrossRef]
- Bonnefoy-Claudet, S.; Cotton, F.; Bard, P.-Y. The Nature of Noise Wavefield and Its Applications for Site Effects Studies: A Literature Review. Earth-Sci. Rev. 2006, 79, 205–227. [Google Scholar] [CrossRef]
- Wang, H.; Quan, W.; Wang, Y.; Miller, G.R. Dual Roadside Seismic Sensor for Moving Road Vehicle Detection and Characterization. Sensors 2014, 14, 2892–2910. [Google Scholar] [CrossRef] [PubMed]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Resolution | 24 bits |
| Sensitivity | 51 mV |
| Dynamic Range | ±1.2 mm/s |
| Sensor Noise | 0.023 mm/s at 512 Hz |
| Axes | XYZ |
| Bandwidth | 0.1–1024 Hz |
| Temperature Range | −10 to 70 °C |
| Storage | 4 GB |
| ID | Instrument | Start Time (EST) | End Time (EST) | Duration (min) | Angle to Reference (°) | Distance to Reference (m) |
|---|---|---|---|---|---|---|
| E1A | T1 | 14:58:01 | 17:58:00 | 180 | -- | -- |
| E1A | T2 | 14:58:17 | 17:58:16 | 180 | 104 | 20 |
| E1B1 | T1 | 15:00:13 | 15:20:12 | 20 | 41 | 180 |
| E1B1 | T2 | 15:00:03 | 15:20:02 | 20 | 36 | 172 |
| E1B2 | T1 | 15:31:01 | 15:51:00 | 20 | 88 | 190 |
| E1B2 | T2 | 15:31:17 | 15:51:16 | 20 | 88 | 211 |
| E1B3 | T1 | 16:02:07 | 16:22:06 | 20 | 93 | 130 |
| E1B3 | T2 | 16:02:24 | 16:22:23 | 20 | 92 | 146 |
| E1B4 | T1 | 16:34:33 | 16:54:32 | 20 | 163 | 90 |
| E1B4 | T2 | 16:34:23 | 16:54:22 | 20 | 174 | 83 |
| E1B5 | T1 | 17:06:19 | 17:26:18 | 20 | 312 | 80 |
| E1B5 | T2 | 17:06:35 | 17:26:34 | 20 | 313 | 68 |
| E1B6 | T1 | 17:36:58 | 17:56:57 | 20 | 15 | 110 |
| E1B6 | T2 | 17:37:12 | 17:57:11 | 20 | 39 | 107 |
| Parameter | Value |
|---|---|
| 2 | |
| 0.1 | |
| 60 | |
| 10 | |
| 1 | |
| 32 samples | |
| 1 sample | |
| 0.024 mm/s |
| Source | Frequency (Hz) | Amplitude (mm/s) | Azimuth (°) | Bandwidth (Hz) |
|---|---|---|---|---|
| Pedestrian | 5–15 | <0.03 | 70–80 (EW) | <5 |
| Vehicle (Transportation) | 15–35 | >0.05 | 75–85 (EW) | 5–15 |
| Vehicle (Residential) | 35–45 | <0.05 | 15–25 (NS) | >5 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Saadia, B.; Fotopoulos, G. Characterizing Ambient Seismic Noise in an Urban Park Environment. Sensors 2023, 23, 2446. https://doi.org/10.3390/s23052446
Saadia B, Fotopoulos G. Characterizing Ambient Seismic Noise in an Urban Park Environment. Sensors. 2023; 23(5):2446. https://doi.org/10.3390/s23052446
Chicago/Turabian StyleSaadia, Benjamin, and Georgia Fotopoulos. 2023. "Characterizing Ambient Seismic Noise in an Urban Park Environment" Sensors 23, no. 5: 2446. https://doi.org/10.3390/s23052446
APA StyleSaadia, B., & Fotopoulos, G. (2023). Characterizing Ambient Seismic Noise in an Urban Park Environment. Sensors, 23(5), 2446. https://doi.org/10.3390/s23052446