
Flexible and Robust Triboelectric Nanogenerators with Chemically Prepared Metal Electrodes and a Plastic Contact Interface Based on Low-Cost Pressure-Sensitive Adhesive

 ,
, 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Fabrication of the Chemically Prepared Metal Electrode on the Flexible Triboelectric Materials Aims to Form Super-Durable and Flexible TENG
2.2. Preparation of the Soft Contact Interface Using a Low-Cost Pressure-Sensitive Adhesive
3. Results
3.1. Chemical Fabrication of the Metal Electrode on Flexible Triboelectric Materials Aims to Form a Super Durable and Flexible TENG
3.1.1. Simultaneously Prepare the Dual Electrodes of the TENG by Chemical Methods
3.1.2. Tearing of the Triboelectric Structure to Form the TENG
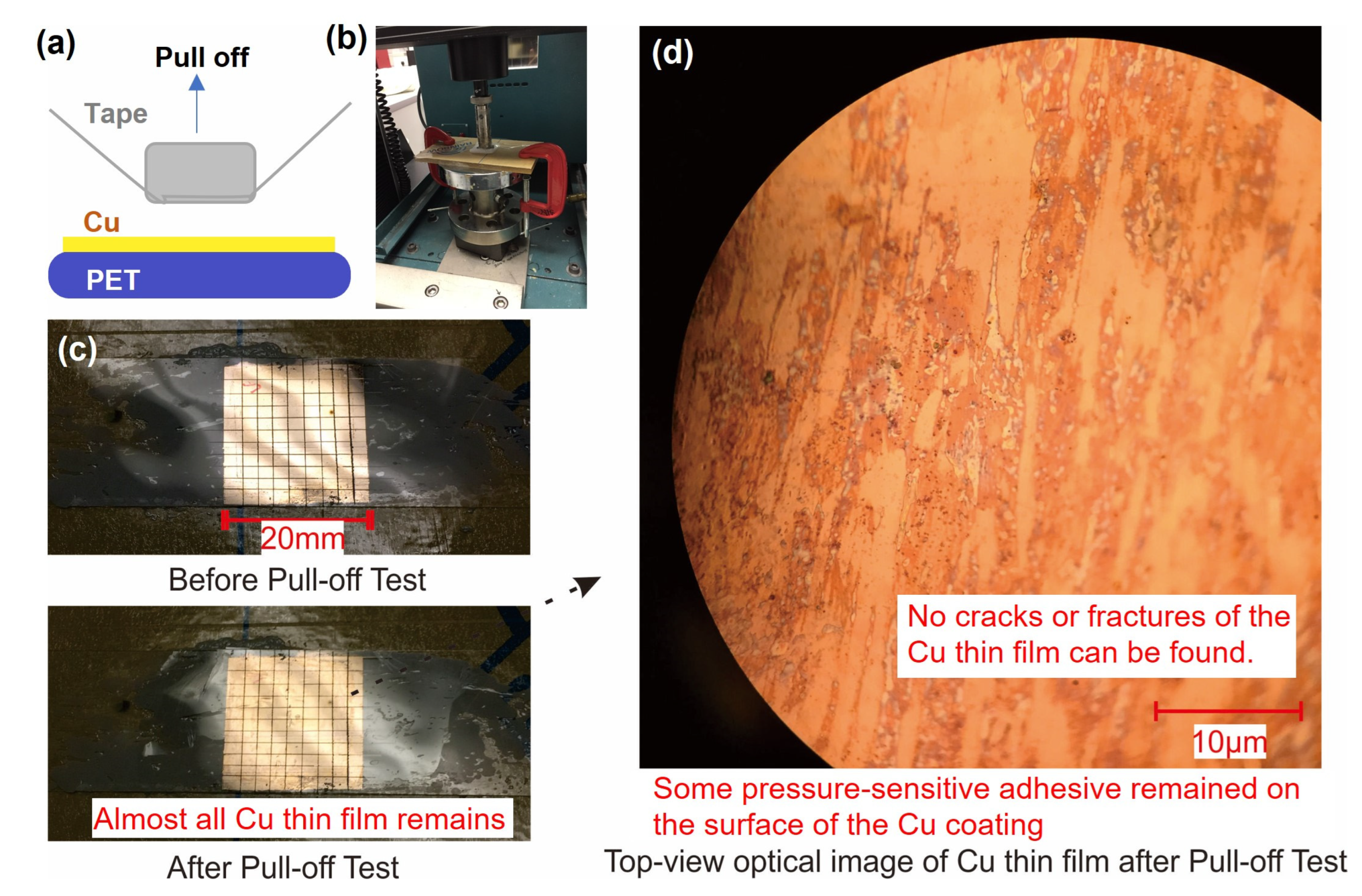
3.1.3. Standard Pull-Off Test for the Copper Coating
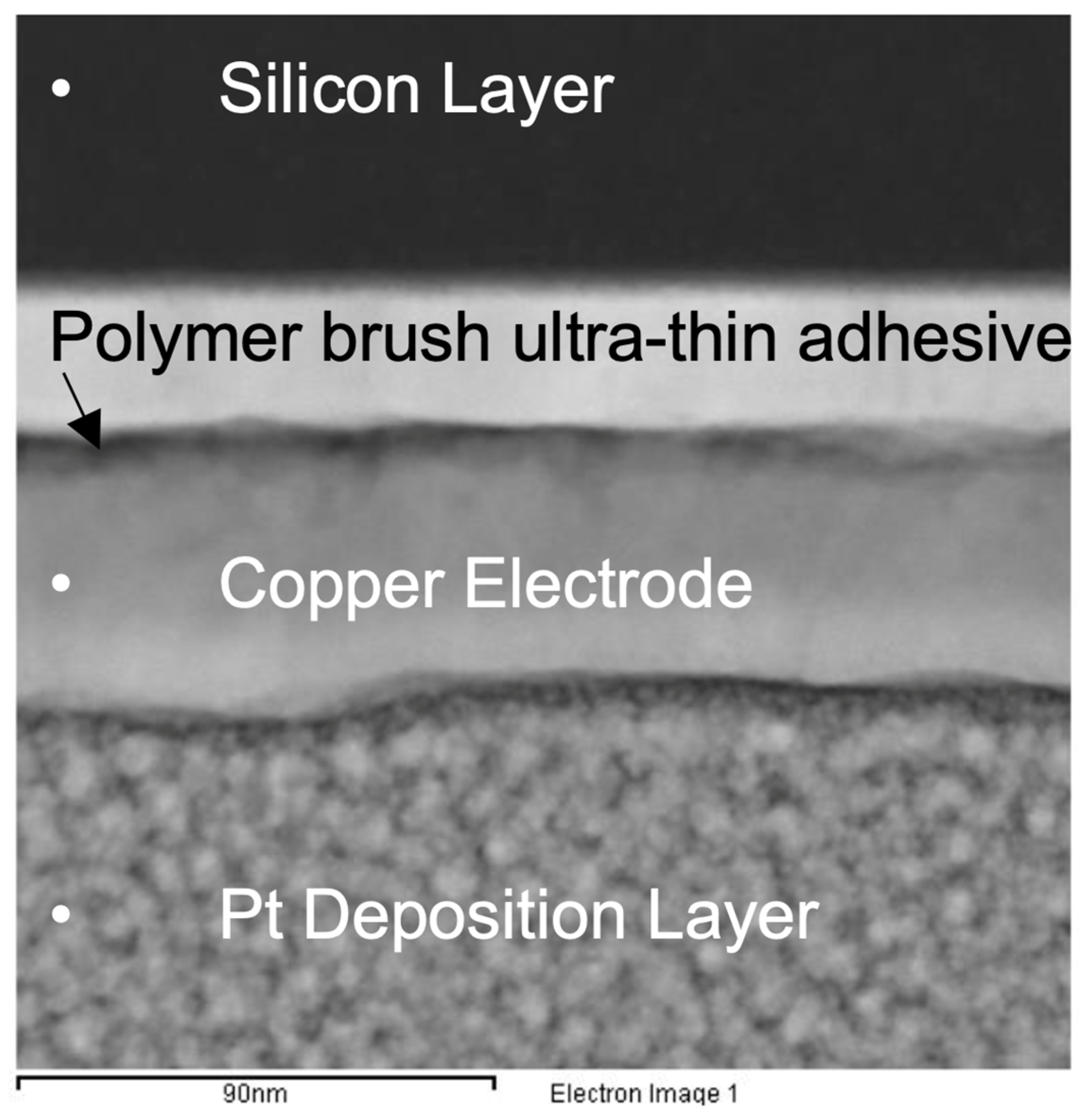
3.1.4. Characterization of the Chemically Prepared Copper Layer
3.2. Pressure-Sensitive Adhesive to Increase the Real Contact Area of the TENG
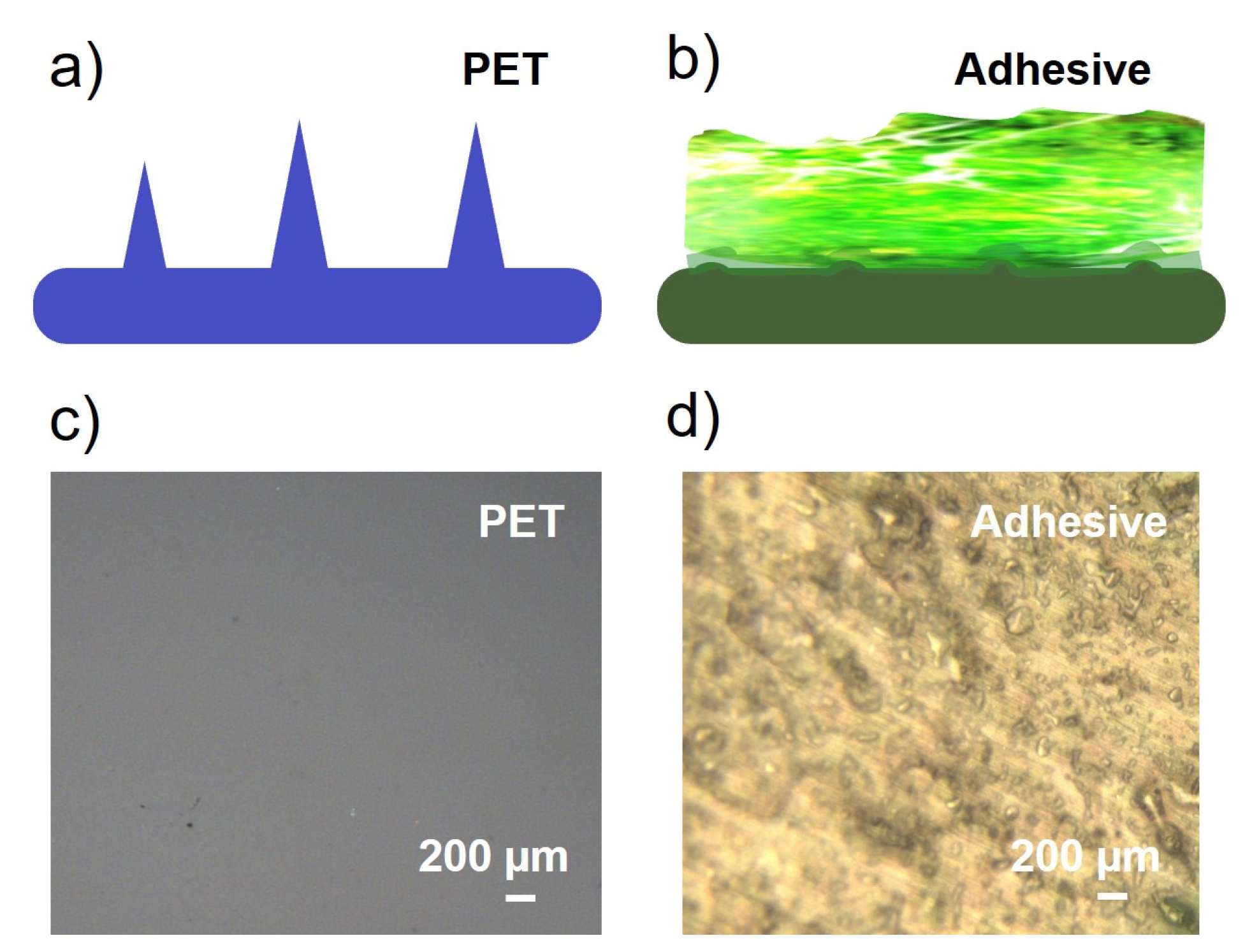
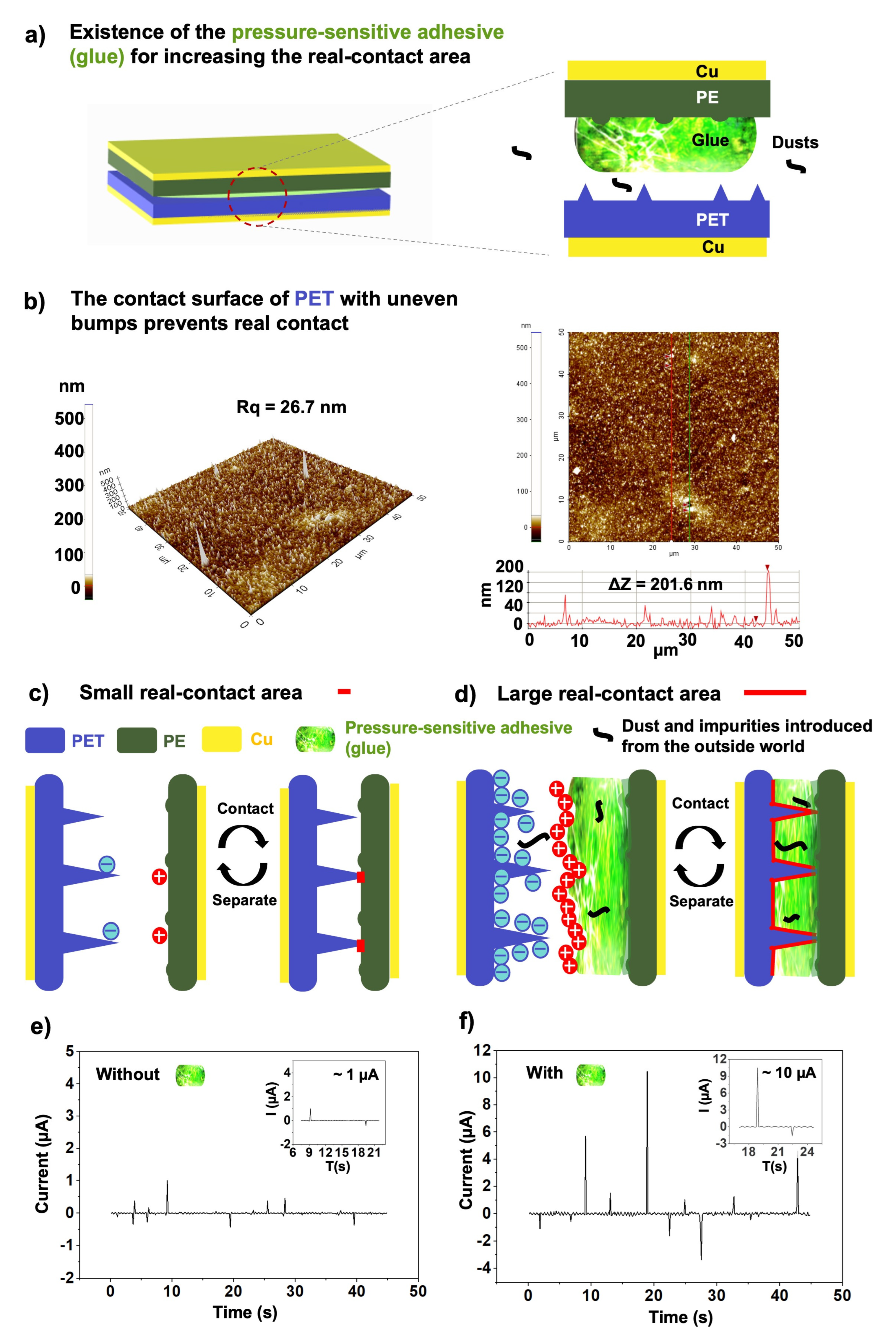
3.2.1. The Pressure-Sensitive Adhesive and Real-Contact Area of the TENG
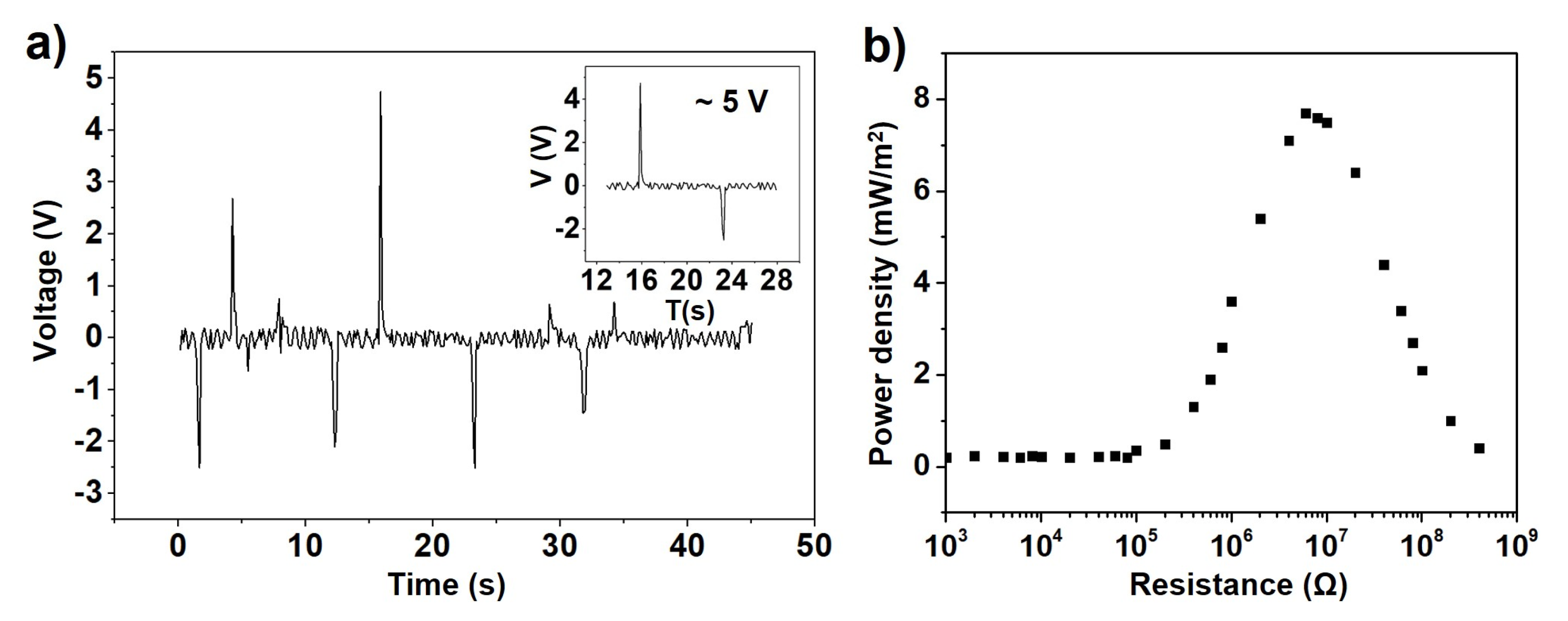
3.2.2. The Output Performance of the As-Formed TENG
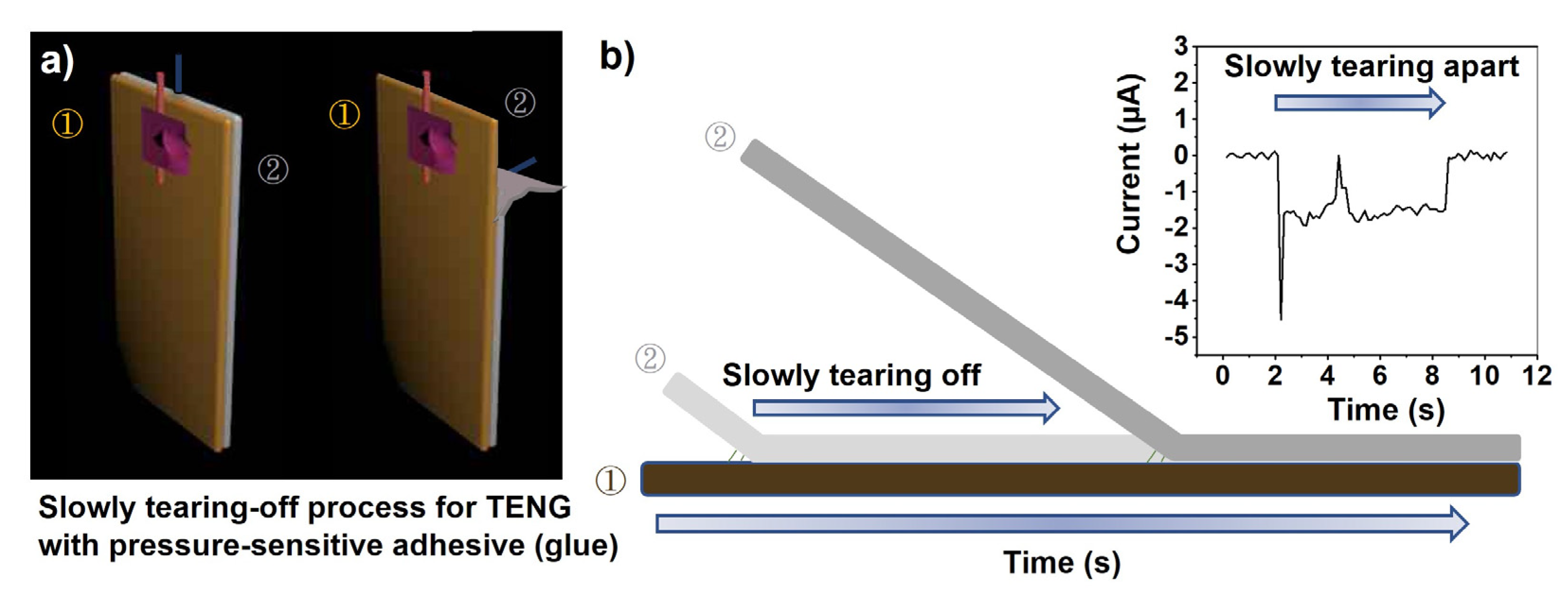
3.2.3. Special Features of the TENG with the Adhesive in the Contact Area
3.3. Fabrication of Washable Garment-Integrated TENG (G-TENG)
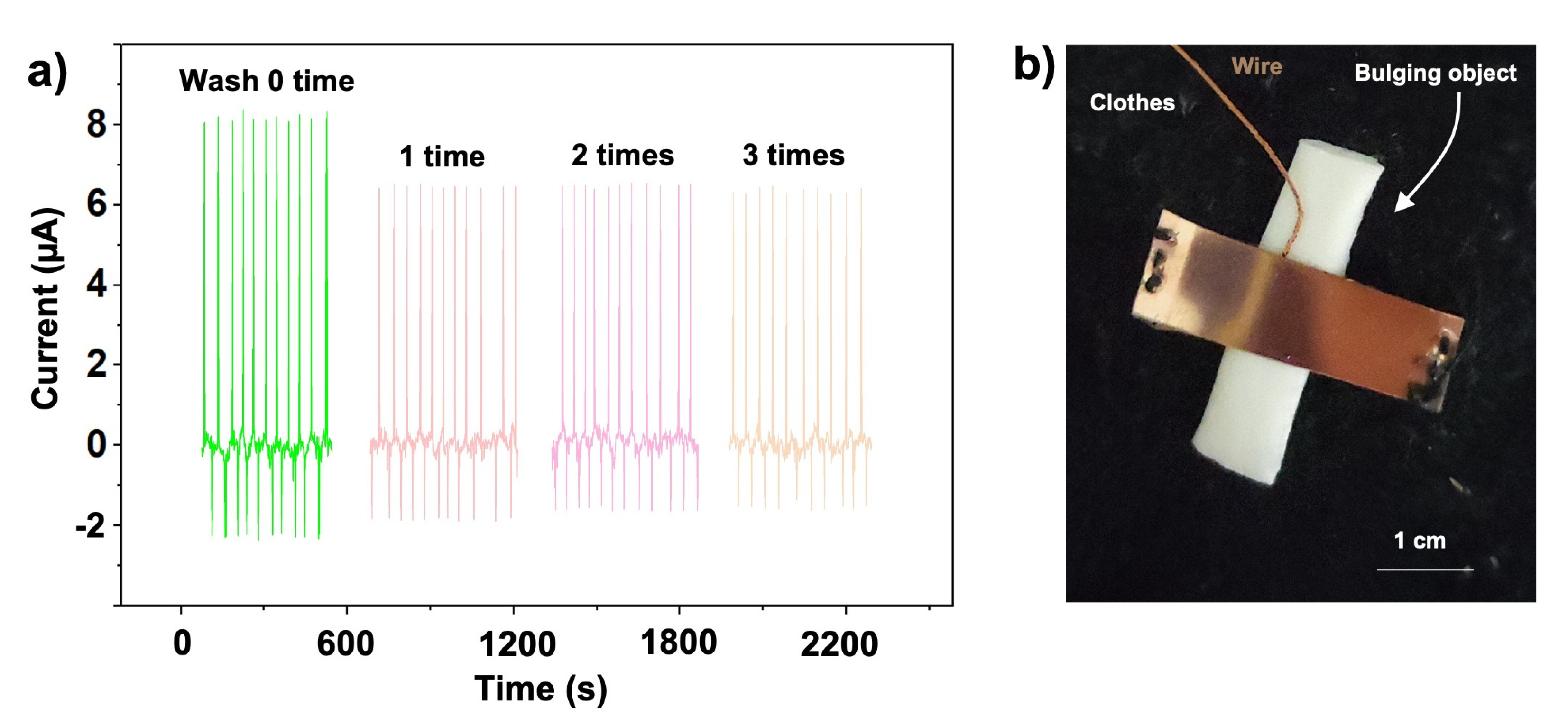
3.3.1. Fabrication of Durable and Washable G-TENG
3.3.2. The Applicability of the G-TENGs in Health Monitoring
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Wang, Z.L. Triboelectric nanogenerator (TENG)—Sparking an energy and sensor revolution. Adv. Energy Mater. 2020, 10, 2000137. [Google Scholar] [CrossRef]
- Luo, J.; Gao, W.; Wang, Z.L. The triboelectric nanogenerator as an innovative technology toward intelligent sports. Adv. Mater. 2021, 33, 2004178. [Google Scholar] [CrossRef] [PubMed]
- Niu, S.; Wang, Z.L. Theoretical systems of triboelectric nanogenerators. Nano Energy 2015, 14, 161–192. [Google Scholar] [CrossRef]
- Luo, J.; Wang, Z.L. Recent progress of triboelectric nanogenerators: From fundamental theory to practical applications. EcoMat 2020, 2, e12059. [Google Scholar] [CrossRef]
- Zhu, J.; Zhu, M.; Shi, Q.; Wen, F.; Liu, L.; Dong, B.; Haroun, A.; Yang, Y.; Vachon, P.; Guo, X.; et al. Progress in TENG technology—A journey from energy harvesting to nanoenergy and nanosystem. EcoMat 2020, 2, e12058. [Google Scholar] [CrossRef]
- Feng, Y.; Dong, Y.; Zhang, L.; Li, X.; Li, L.; Zheng, Y.; Wang, D.; Zhou, F.; Liu, W. Green plant-based triboelectricity system for green energy harvesting and contact warning. EcoMat 2021, 3, e12145. [Google Scholar] [CrossRef]
- Li, J.; Long, Y.; Yang, F.; Wang, X. Respiration-driven triboelectric nanogenerators for biomedical applications. EcoMat 2020, 2, e12045. [Google Scholar] [CrossRef]
- Wang, L.; Song, Y.; Xu, W.; Li, W.; Jin, Y.; Gao, S.; Yang, S.; Wu, C.; Wang, S.; Wang, Z. Harvesting energy from high-frequency impinging water droplets by a droplet-based electricity generator. EcoMat 2021, 3, e12116. [Google Scholar] [CrossRef]
- Yang, P.; Shi, Y.; Tao, X.; Liu, Z.; Li, S.; Chen, X.; Wang, Z.L. Self-powered virtual olfactory generation system based on bionic fibrous membrane and electrostatic field accelerated evaporation. EcoMat 2023, 5, e12298. [Google Scholar] [CrossRef]
- Xia, X.; Liu, Q.; Zhu, Y.; Zi, Y. Recent advances of triboelectric nanogenerator based applications in biomedical systems. EcoMat 2020, 2, e12049. [Google Scholar] [CrossRef]
- Xue, J.; Zou, Y.; Deng, Y.; Li, Z. Bioinspired sensor system for health care and human-machine interaction. EcoMat 2022, 4, e12209. [Google Scholar] [CrossRef]
- Liu, Y.; Yiu, C.; Jia, H.; Wong, T.; Yao, K.; Huang, Y.; Zhou, J.; Huang, X.; Zhao, L.; Li, D. Thin, soft, garment-integrated triboelectric nanogenerators for energy harvesting and human machine interfaces. EcoMat 2021, 3, e12123. [Google Scholar] [CrossRef]
- Liu, T.; Liu, M.; Dou, S.; Sun, J.; Cong, Z.; Jiang, C.; Du, C.; Pu, X.; Hu, W.; Wang, Z.L. Triboelectric-nanogenerator-based soft energy-harvesting skin enabled by toughly bonded elastomer/hydrogel hybrids. ACS Nano 2018, 12, 2818–2826. [Google Scholar] [CrossRef] [PubMed]
- Sun, J.; Pu, X.; Liu, M.; Yu, A.; Du, C.; Zhai, J.; Hu, W.; Wang, Z.L. Self-healable, stretchable, transparent triboelectric nanogenerators as soft power sources. ACS Nano 2018, 12, 6147–6155. [Google Scholar] [CrossRef] [PubMed]
- Gao, M.; Wu, H.; Plamthottam, R.; Xie, Z.; Liu, Y.; Hu, J.; Wu, S.; Wu, L.; He, X.; Pei, Q. Skin temperature-triggered, debonding-on-demand sticker for a self-powered mechanosensitive communication system. Matter 2021, 4, 1962–1974. [Google Scholar] [CrossRef]
- Zheng, Z.; Jur, J.; Cheng, W. Smart materials and devices for electronic textiles. MRS Bull. 2021, 46, 488–490. [Google Scholar] [CrossRef]
- Nie, J.; Chen, X.; Wang, Z.L. Electrically responsive materials and devices directly driven by the high voltage of triboelectric nanogenerators. Adv. Funct. Mater. 2019, 29, 1806351. [Google Scholar] [CrossRef]
- Jiang, C.; Wu, C.; Li, X.; Yao, Y.; Lan, L.; Zhao, F.; Ye, Z.; Ying, Y.; Ping, J. All-electrospun flexible triboelectric nanogenerator based on metallic MXene nanosheets. Nano Energy 2019, 59, 268–276. [Google Scholar] [CrossRef]
- Baëtens, T.; Pallecchi, E.; Thomy, V.; Arscott, S. Cracking effects in squashable and stretchable thin metal films on PDMS for flexible microsystems and electronics. Sci. Rep. 2018, 8, 9492. [Google Scholar] [CrossRef]
- Ko, Y.H.; Nagaraju, G.; Lee, S.H.; Yu, J.S. PDMS-based triboelectric and transparent nanogenerators with ZnO nanorod arrays. ACS Appl. Mater. Interfaces 2014, 6, 6631–6637. [Google Scholar] [CrossRef]
- Yang, H.; Fan, F.R.; Xi, Y.; Wu, W. Design and engineering of high-performance triboelectric nanogenerator for ubiquitous unattended devices. EcoMat 2021, 3, e12093. [Google Scholar] [CrossRef]
- Zheng, P.; McCarthy, T.J. Rediscovering silicones: Molecularly smooth, low surface energy, unfilled, uv/vis-transparent, extremely cross-linked, thermally stable, hard, elastic pdms. Langmuir 2010, 26, 18585–18590. [Google Scholar] [CrossRef] [PubMed]
- Liu, L.; Shi, Q.; Guo, X.; Zhang, Z.; Lee, C. A facile frequency tuning strategy to realize vibration-based hybridized piezoelectric-triboelectric nanogenerators. EcoMat 2022, 5, e12279. [Google Scholar] [CrossRef]
- Xu, G.; Guan, D.; Yin, X.; Fu, J.; Wang, J.; Zi, Y. A coplanar-electrode direct-current triboelectric nanogenerator with facile fabrication and stable output. EcoMat 2020, 2, e12037. [Google Scholar] [CrossRef]
- Niu, S.; Wang, S.; Lin, L.; Liu, Y.; Zhou, Y.S.; Hu, Y.; Wang, Z.L. Theoretical study of contact-mode triboelectric nanogenerators as an effective power source. Energy Environ. Sci. 2013, 6, 3576–3583. [Google Scholar] [CrossRef]
- Chao, S.; Ouyang, H.; Jiang, D.; Fan, Y.; Li, Z. Triboelectric nanogenerator based on degradable materials. EcoMat 2021, 3, e12072. [Google Scholar] [CrossRef]
- Yan, C.; Zheng, Z. Fabrication of highly durable, washable and scalable conductive textiles by polymer-assisted metal deposition (PAMD). In Proceedings of the 7th Textile Bioengineering and Informatics Symposium, TBIS 2014, in conjunction with the 5th Asian Protective Clothing Conference, APCC 2014, Hong Kong, 6–8 August 2014; pp. 1–9. [Google Scholar]
- Yan, C.; Zheng, Z. Textile-Based Electronics: Polymer-Assisted Metal Deposition (PAMD). Handb. Fibrous Mater. 2020, 721–748. [Google Scholar] [CrossRef]
- Gao, Y.; Hu, H.; Chang, J.; Huang, Q.; Zhuang, Q.; Li, P.; Zheng, Z. Realizing High-Energy and Stable Wire-Type Batteries with Flexible Lithium–Metal Composite Yarns. Adv. Energy Mater. 2021, 11, 2101809. [Google Scholar] [CrossRef]
- Wang, W.; Gan, Q.; Zhang, Y.; Lu, X.; Wang, H.; Zhang, Y.; Hu, H.; Chen, L.; Shi, L.; Wang, S. Polymer-Assisted Metallization of Mammalian Cells. Adv. Mater. 2021, 33, 2102348. [Google Scholar] [CrossRef]
- Wang, S.; Gao, Y.; Huang, Q.; Guo, X.; Yang, A.; Zhang, Y.; Zhuang, Q.; Chen, D.; Chen, L.; Ju, X. Inkjet-Printed Xerogel Scaffolds Enabled Room-Temperature Fabrication of High-Quality Metal Electrodes for Flexible Electronics. Adv. Funct. Mater. 2022, 32, 2203730. [Google Scholar] [CrossRef]
- Zhang, Z.; Zhang, X.; Xin, Z.; Deng, M.; Wen, Y.; Song, Y. Synthesis of monodisperse silver nanoparticles for ink-jet printed flexible electronics. Nanotechnology 2011, 22, 425601. [Google Scholar] [CrossRef]
- Fernandes, I.J.; Aroche, A.F.; Schuck, A.; Lamberty, P.; Peter, C.R.; Hasenkamp, W.; Rocha, T.L. Silver nanoparticle conductive inks: Synthesis, characterization, and fabrication of inkjet-printed flexible electrodes. Sci. Rep. 2020, 10, 1–11. [Google Scholar] [CrossRef] [PubMed]
- Yang, B.; Xiong, Y.; Ma, K.; Liu, S.; Tao, X. Recent advances in wearable textile-based triboelectric generator systems for energy harvesting from human motion. EcoMat 2020, 2, e12054. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Y.; Yi, J.; Peng, X.; Cheng, R.; Ning, C.; Sheng, F.; Wang, S.; Dong, K.; Wang, Z.L. Large-scale fabrication of core-shell triboelectric braided fibers and power textiles for energy harvesting and plantar pressure monitoring. EcoMat 2022, 4, e12191. [Google Scholar] [CrossRef]
- Zhao, Z.; Yan, C.; Liu, Z.; Fu, X.; Peng, L.M.; Hu, Y.; Zheng, Z. Machine-washable textile triboelectric nanogenerators for effective human respiratory monitoring through loom weaving of metallic yarns. Adv. Mater. 2016, 28, 10267–10274. [Google Scholar] [CrossRef]
- Zhao, Z.; Huang, Q.; Yan, C.; Liu, Y.; Zeng, X.; Wei, X.; Hu, Y.; Zheng, Z. Machine-washable and breathable pressure sensors based on triboelectric nanogenerators enabled by textile technologies. Nano Energy 2020, 70, 104528. [Google Scholar] [CrossRef]
- Xu, Y.; Min, G.; Gadegaard, N.; Dahiya, R.; Mulvihill, D.M. A unified contact force-dependent model for triboelectric nanogenerators accounting for surface roughness. Nano Energy 2020, 76, 105067. [Google Scholar] [CrossRef]
- Wen, J.; He, H.; Niu, C.; Rong, M.; Huang, Y.; Wu, Y. An improved equivalent capacitance model of the triboelectric nanogenerator incorporating its surface roughness. Nano Energy 2022, 96, 107070. [Google Scholar] [CrossRef]
- Min, G.; Xu, Y.; Cochran, P.; Gadegaard, N.; Mulvihill, D.M.; Dahiya, R. Origin of the contact force-dependent response of triboelectric nanogenerators. Nano Energy 2021, 83, 105829. [Google Scholar] [CrossRef]
- Zhang, R.; Olin, H. Material choices for triboelectric nanogenerators: A critical review. EcoMat 2020, 2, e12062. [Google Scholar] [CrossRef]
- Choi, Y.S.; Kar-Narayan, S. Nylon-11 nanowires for triboelectric energy harvesting. EcoMat 2020, 2, e12063. [Google Scholar] [CrossRef]
- Chen, L.; Li, P.; Lu, X.; Wang, S.; Zheng, Z. Binary polymer brush patterns from facile initiator stickiness for cell culturing. Faraday Discuss. 2019, 219, 189–202. [Google Scholar] [CrossRef] [PubMed]
- Chen, L.; Xie, Z.; Gan, T.; Wang, Y.; Zhang, G.; Mirkin, C.A.; Zheng, Z. Biomimicking Nano-Micro Binary Polymer Brushes for Smart Cell Orientation and Adhesion Control. Small 2016, 12, 3400–3406. [Google Scholar] [CrossRef] [PubMed]
- Huang, Q.; Wang, D.; Hu, H.; Shang, J.; Chang, J.; Xie, C.; Yang, Y.; Lepró, X.; Baughman, R.H.; Zheng, Z. Additive functionalization and embroidery for manufacturing wearable and washable textile supercapacitors. Adv. Funct. Mater. 2020, 30, 1910541. [Google Scholar] [CrossRef]
- Chen, X.; Villa, N.S.; Zhuang, Y.; Chen, L.; Wang, T.; Li, Z.; Kong, T. Stretchable supercapacitors as emergent energy storage units for health monitoring bioelectronics. Adv. Energy Mater. 2020, 10, 1902769. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, S.-C.; Zhang, B.; Kang, L.; Liang, C.; Chen, D.; Liu, G.; Guo, X. Flexible and Robust Triboelectric Nanogenerators with Chemically Prepared Metal Electrodes and a Plastic Contact Interface Based on Low-Cost Pressure-Sensitive Adhesive. Sensors 2023, 23, 2021. https://doi.org/10.3390/s23042021
Wang S-C, Zhang B, Kang L, Liang C, Chen D, Liu G, Guo X. Flexible and Robust Triboelectric Nanogenerators with Chemically Prepared Metal Electrodes and a Plastic Contact Interface Based on Low-Cost Pressure-Sensitive Adhesive. Sensors. 2023; 23(4):2021. https://doi.org/10.3390/s23042021
Chicago/Turabian StyleWang, Shuai-Chen, Binbin Zhang, Lijing Kang, Cunman Liang, Dongdong Chen, Guoqiang Liu, and Xuyun Guo. 2023. "Flexible and Robust Triboelectric Nanogenerators with Chemically Prepared Metal Electrodes and a Plastic Contact Interface Based on Low-Cost Pressure-Sensitive Adhesive" Sensors 23, no. 4: 2021. https://doi.org/10.3390/s23042021
APA StyleWang, S.-C., Zhang, B., Kang, L., Liang, C., Chen, D., Liu, G., & Guo, X. (2023). Flexible and Robust Triboelectric Nanogenerators with Chemically Prepared Metal Electrodes and a Plastic Contact Interface Based on Low-Cost Pressure-Sensitive Adhesive. Sensors, 23(4), 2021. https://doi.org/10.3390/s23042021