
Development of a Soil Moisture Prediction Model Based on Recurrent Neural Network Long Short-Term Memory (RNN-LSTM) in Soybean Cultivation
 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
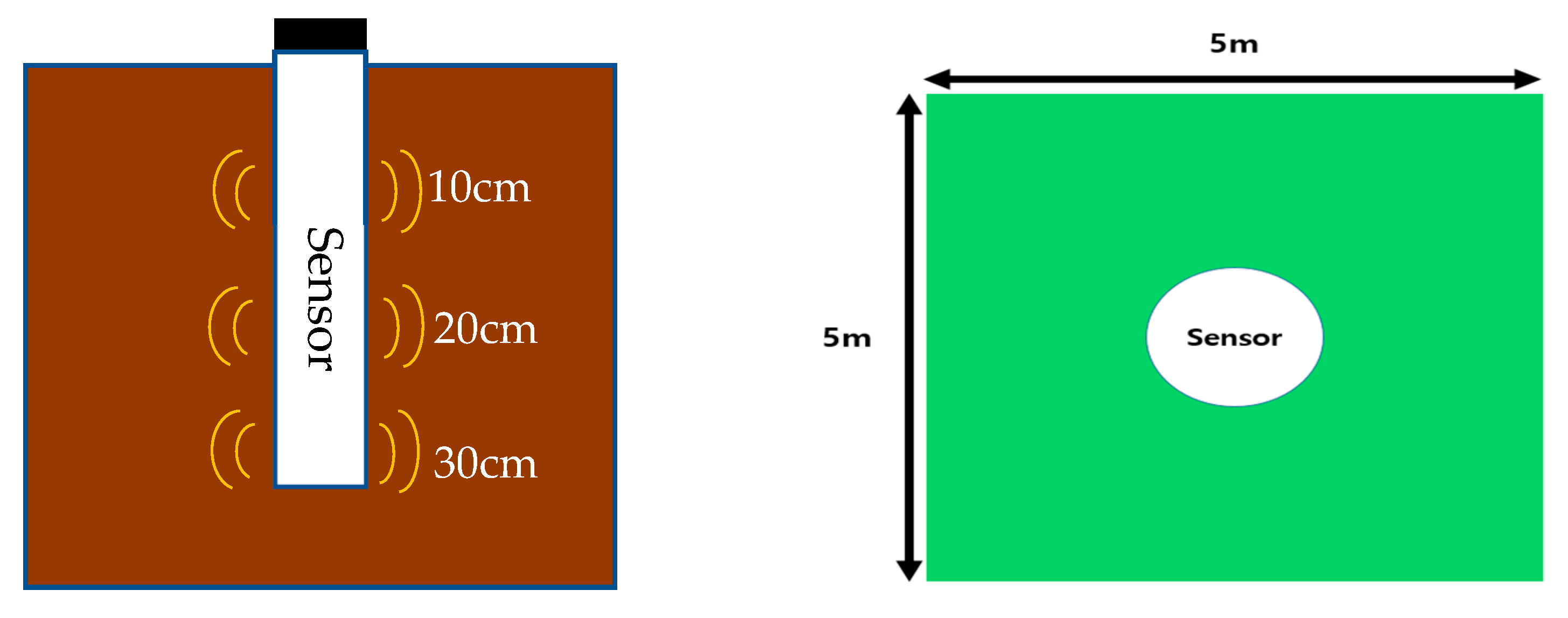
2.1. Data Acquisition and Measurement
2.2. LSTM Model for Predicting Soil Moisture
2.3. Conditions for Development of RNN-LSTM Model for Prediction of Soil Moisture
2.4. RNN-LSTM Model Input Factor for Prediction of Soil Moisture
2.5. Development of RNN-LSTM Model for Prediction of Soil Moisture and Verification of Performance
3. Results and Discussion
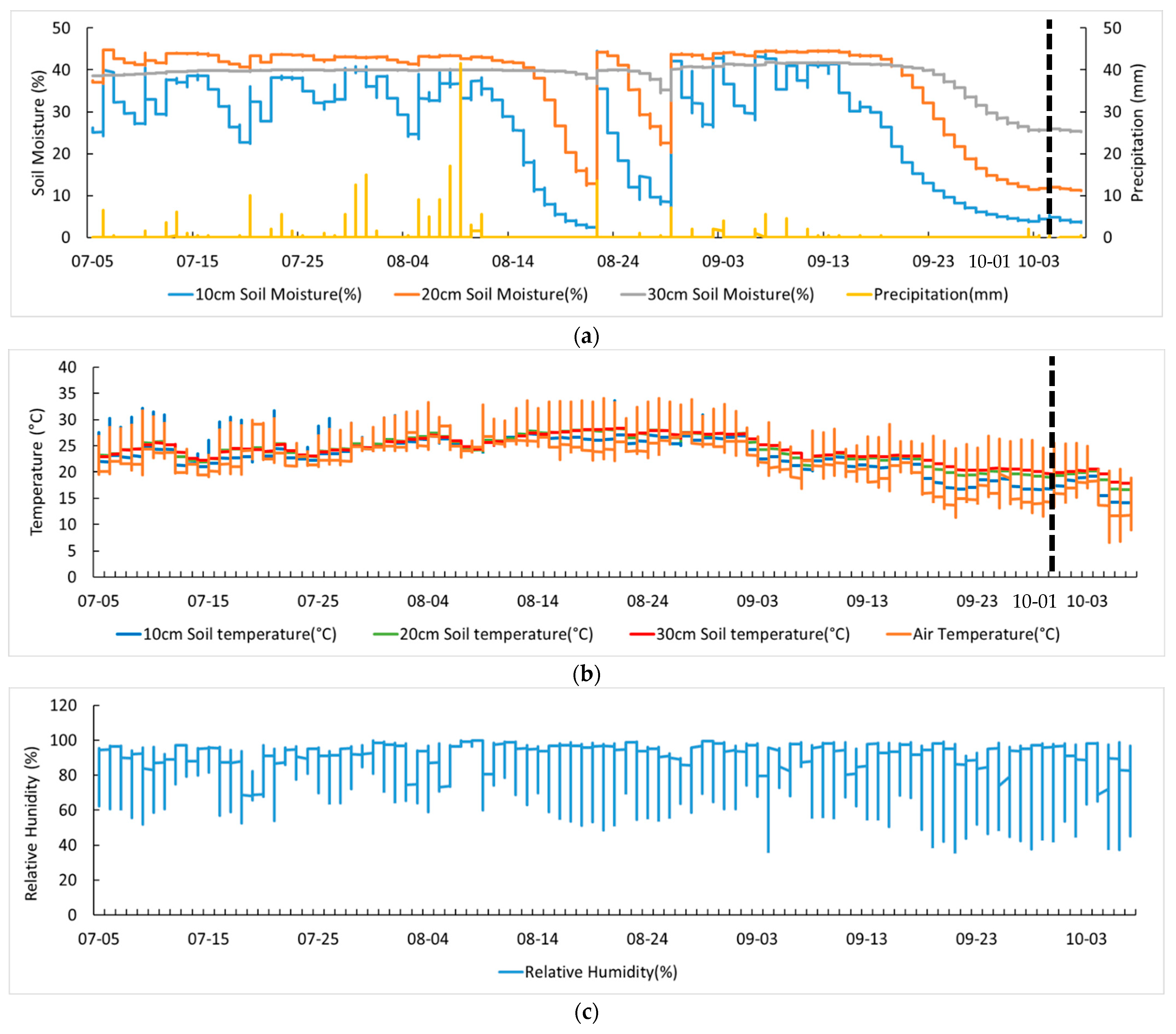
3.1. Weather and Environmental Data
3.2. Development of RNN-LSTM Model for Prediction of Soil Moisture Content
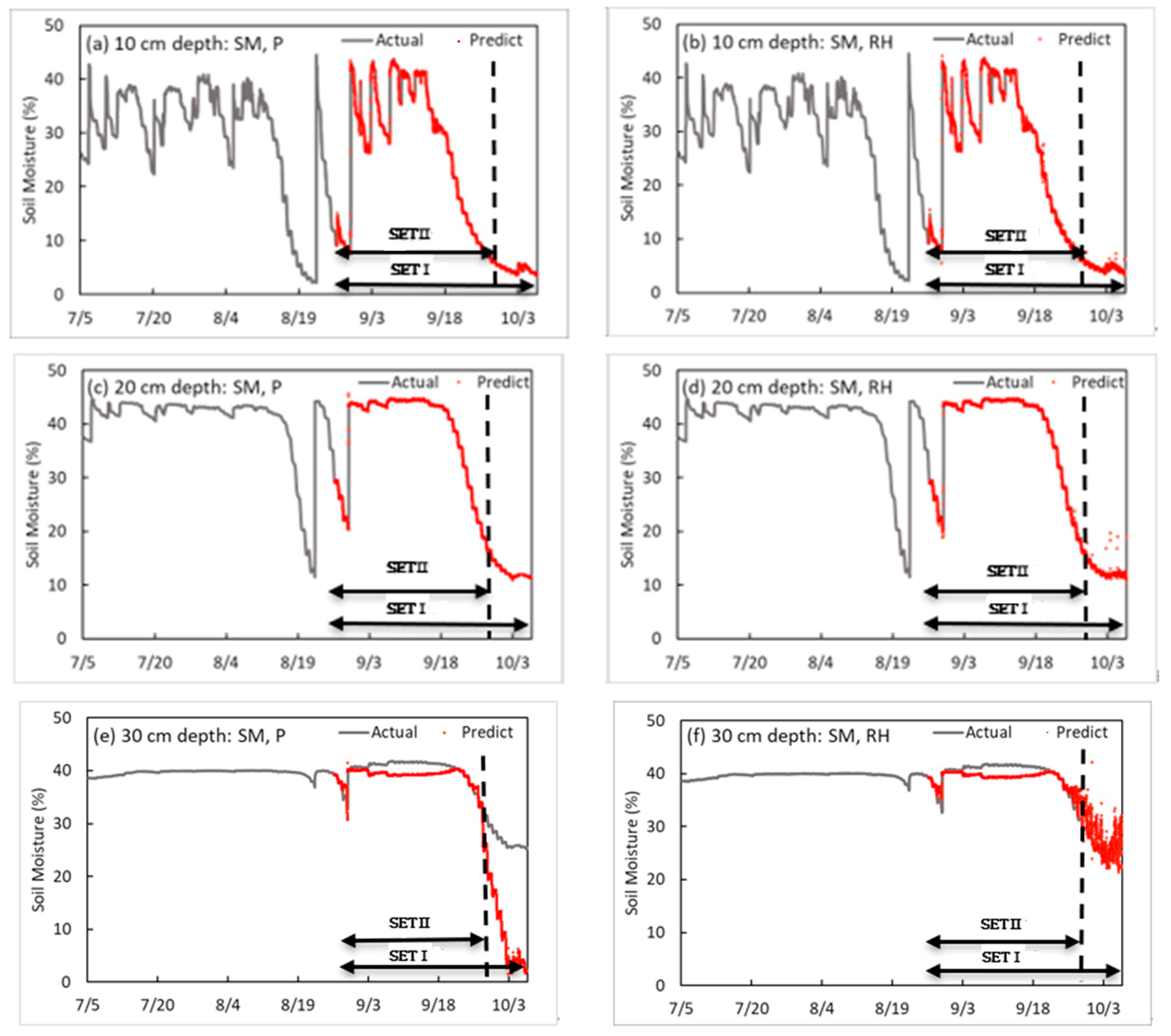
3.2.1. Two-Input-Factors Model: Development of RNN-LSTM Model for Prediction of Soil Moisture
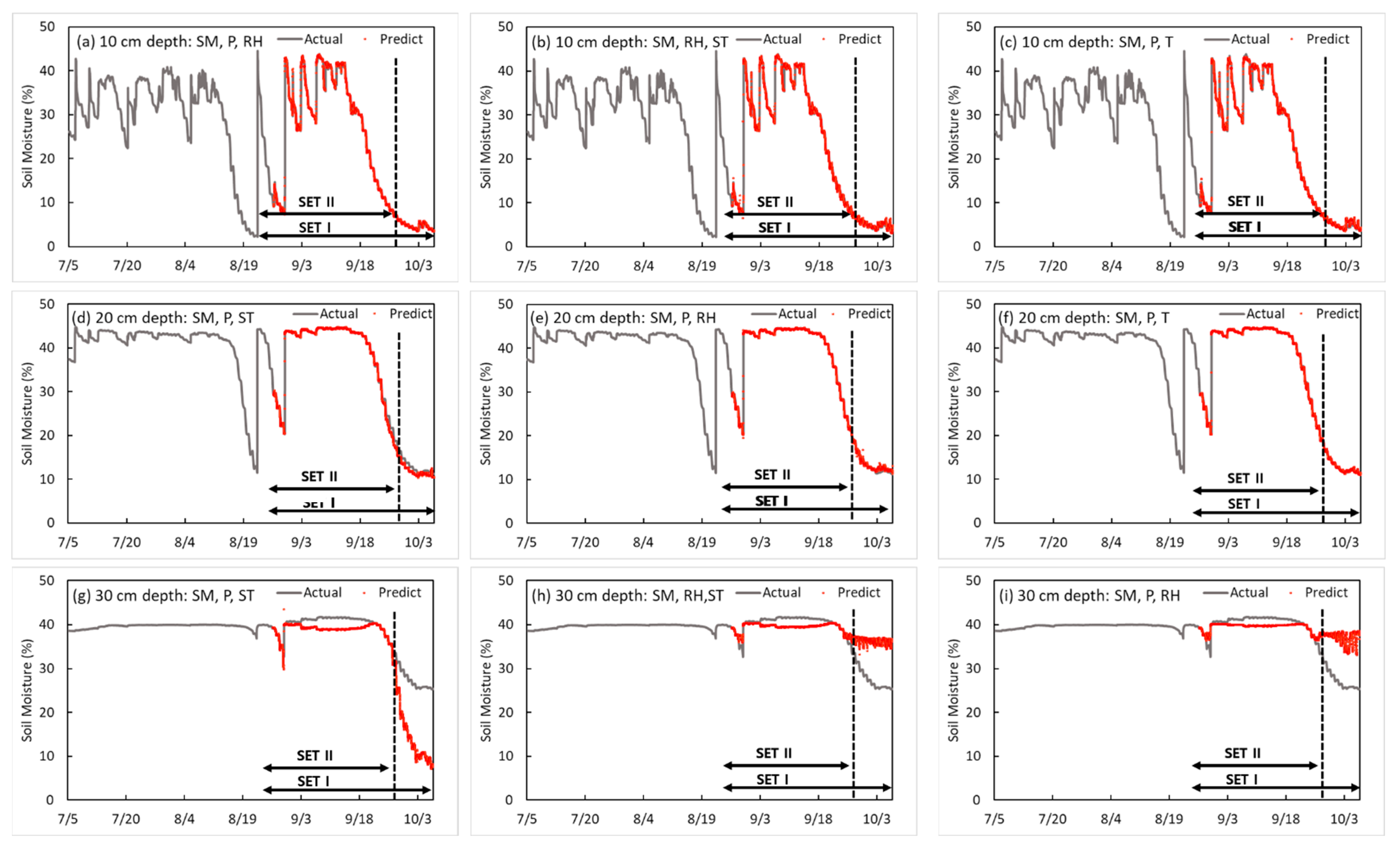
3.2.2. Three-Input-Factors Model: Development of RNN-LSTM Model for Prediction of Soil Moisture
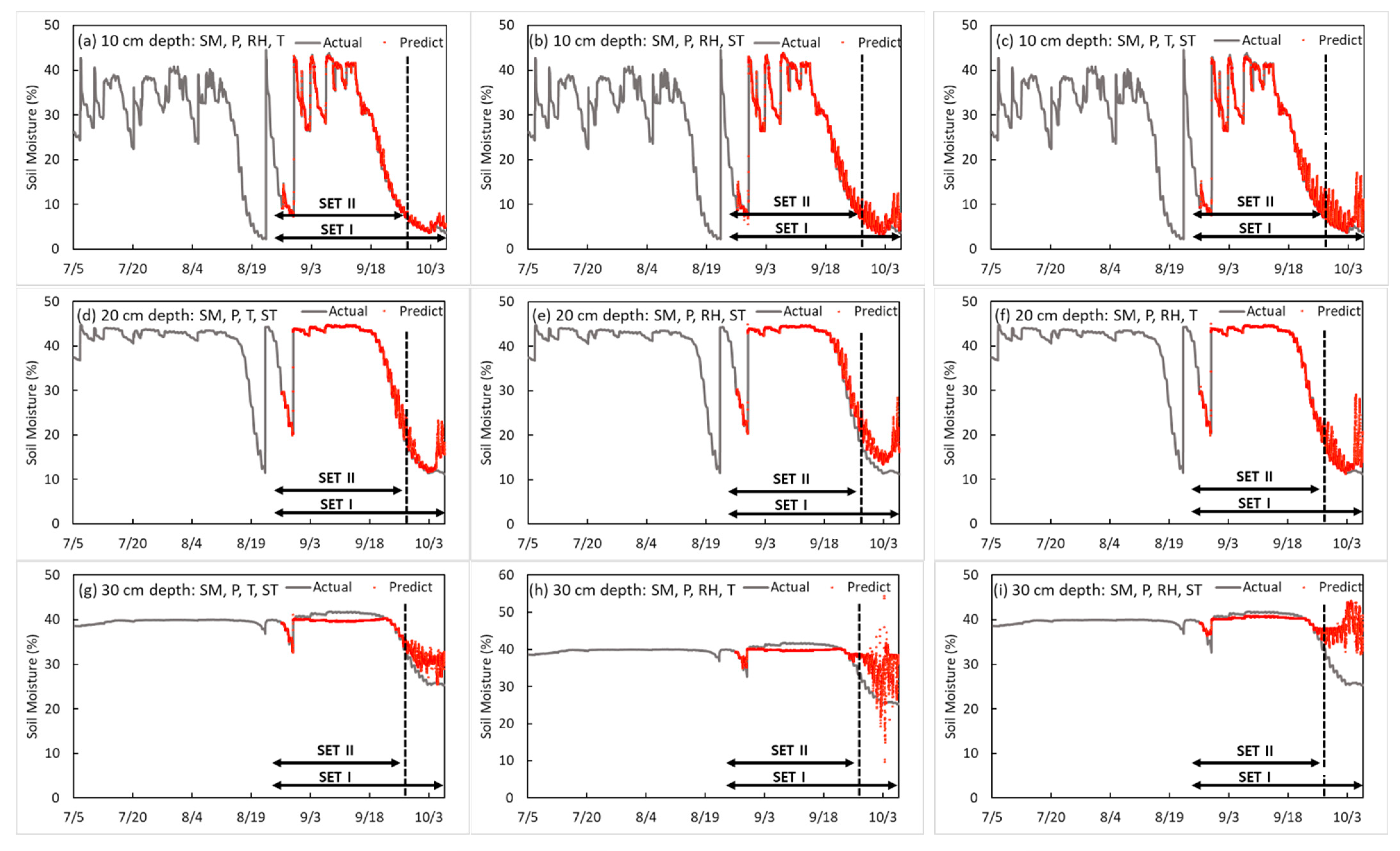
3.2.3. Four-Input-Factor Model: Development of RNN-LSTM Model for Prediction of Soil Moisture
3.2.4. Five-Input-Factors Model: Development of RNN-LSTM Model for Prediction of Soil Moisture
3.3. Study of Development Results of RNN-LSTM Model for Prediction of SM and Comparison of Models
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hartman, G.L.; West, E.D.; Herman, T.K. Crops that feed the World 2. Soybean—Worldwide production, use, and constraints caused by pathogens and pests. Food Secur. 2011, 3, 5–17. [Google Scholar] [CrossRef]
- Ashley, D.A. Soybean. In Crop-Water Relations; Wiley: New York, NY, USA, 1983; pp. 389–422. [Google Scholar]
- Vergni, L. Agricultural drought: Indices, definition and analysis. In The Basis of Civilization–Water Science? Rodda, J.C., Lucio, U., Eds.; International Association of Hydrological Science: Wallingford, UK, 2004; Volume 286, pp. 246–254. [Google Scholar]
- Martínez-Fernández, J.; González-Zamora, A.; Sánchez, N.; Gumuzzio, A.; Herrero-Jiménez, C. Satellite soil moisture for agricultural drought monitoring: Assessment of the SMOS derived Soil Water Deficit Index. Remote. Sens. Environ. 2016, 177, 277–286. [Google Scholar] [CrossRef]
- Feki, M.; Ravazzani, G.; Ceppi, A.; Milleo, G.; Mancini, M. Impact of Infiltration Process Modeling on Soil Water Content Simulations for Irrigation Management. Water 2018, 10, 850. [Google Scholar] [CrossRef]
- Majumdar, P.; Mitra, S.; Bhattacharya, D. IoT for Promoting Agriculture 4.0: A Review from the Perspective of Weather Monitoring, Yield Prediction, Security of WSN Protocols, and Hardware Cost Analysis. J. Biosyst. Eng. 2021, 46, 440–461. [Google Scholar] [CrossRef]
- Ahmad, N.; Malagoli, M.; Wirtz, M.; Hell, R. Drought stress in maize causes differential acclimation responses of glutathione and sulfur metabolism in leaves and roots. BMC Plant Biol. 2016, 16, 247. [Google Scholar] [CrossRef]
- De Wit, A.D.; Van Diepen, C.A. Crop model data assimilation with the Ensemble Kalman filter for improving regional crop yield forecasts. Agric. For. Meteorol. 2007, 146, 38–56. [Google Scholar] [CrossRef]
- Mladenova, I.E.; Bolten, J.D.; Crow, W.T.; Anderson, M.C.; Hain, C.R.; Johnson, D.M.; Mueller, R. Intercomparison of soil moisture, evaporative stress, and vegetation indices for estimating corn and soybean yields over the US. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2017, 10, 1328–1343. [Google Scholar] [CrossRef]
- Kim, D.H.; Kim, J.; Kwon, S.H.; Jung, K.-Y.; Lee, S.H. Simulation of Soil Water Movement in Upland Soils Under Sprinkler and Spray Hose Irrigation Using HYDRUS-1D. J. Biosyst. Eng. 2022, 47, 448–457. [Google Scholar] [CrossRef]
- Park, S.W. Simulating potential crop yields and probable damages from abnormal weather conditions. In Proceedings of the Korea Water Resources Association Conference, Seoul, Republic of Korea, 1 February 1996; pp. 401–448. [Google Scholar]
- Han, S.-H.; Ahn, J.-H.; Kim, S.-D. The Stochastic Behavior of Soil Water and the Impact of Climate Change on Soil Water. J. Korea Water Resour. Assoc. 2009, 42, 433–443. [Google Scholar] [CrossRef]
- Shaheb, M.R.; Venkatesh, R.; Shearer, S.A. A review on the effect of soil compaction and its management for sus-tainable crop production. J. Biosyst. Eng. 2021, 46, 417–439. [Google Scholar] [CrossRef]
- Skierucha, W.; Wilczek, A. A FDR Sensor for Measuring Complex Soil Dielectric Permittivity in the 10–500 MHz Frequency Range. Sensors 2010, 10, 3314–3329. [Google Scholar] [CrossRef]
- Kamilaris, A.; Prenafeta-Boldú, F.X. Deep learning in agriculture: A survey. Comput. Electron. Agric. 2018, 147, 70–90. [Google Scholar] [CrossRef]
- Veres, M.; Lacey, G.; Taylor, G.W. Deep Learning Architectures for Soil Property Prediction. In Proceedings of the 2015 12th Conference on Computer and Robot Vision, Halifax, NS, Canada, 3–5 June 2015; pp. 8–15. [Google Scholar] [CrossRef]
- Wang, J.R.; Chen, T.J.; Wang, Y.B.; Wang, L.S.; Xie, C.J.; Zhang, J.; Chen, H.B. Soil near-infrared spectroscopy prediction model based on deep sparse learning. Chin. J. Lumin. 2017, 38, 109–116. [Google Scholar] [CrossRef]
- Liu, D.; Liu, C.; Tang, Y.; Gong, C. A GA-BP Neural Network Regression Model for Predicting Soil Moisture in Slope Ecological Protection. Sustainability 2022, 14, 1386. [Google Scholar] [CrossRef]
- Sit, M.A.; Demiray, B.Z.; Xiang, Z.; Ewing, G.; Sermet, Y.; Demir, I. A comprehensive review of deep learning applications in hydrology and water resources. Water Sci. Technol. 2020, 82, 2635–2670. [Google Scholar] [CrossRef] [PubMed]
- Shin, D.H.; Choi, K.H.; Kim, C.B. Deep Learning Model for Prediction Rate Improvement of Stock Price Using RNN and LSTM. J. Korean Inst. Inf. Technol. 2017, 15, 9–16. [Google Scholar] [CrossRef]
- Bengio, Y.; Simard, P.; Frasconi, P. Learning long-term dependencies with gradient descent is difficult. IEEE Trans. Neural Netw. 1994, 5, 157–166. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Zhang, Y.; Ren, X. Modeling Hourly Soil Temperature Using Deep BiLSTM Neural Network. Algorithms 2020, 13, 173. [Google Scholar] [CrossRef]
- Pan, J.; Shangguan, W.; Li, L.; Yuan, H.; Zhang, S.; Lu, X.; Dai, Y. Using data-driven methods to explore the predict-ability of surface soil moisture with FLUXNET site data. Hydrol. Process. 2019, 33, 2978–2996. [Google Scholar] [CrossRef]
- Gao, Y.; Duan, A.; Qiu, X.; Liu, Z.; Sun, J.; Zhang, J.; Wang, H. Distribution of roots and root length density in a maize/soybean strip intercropping system. Agric. Water Manag. 2010, 98, 199–212. [Google Scholar] [CrossRef]
- Han, K.H.; Jung, K.H.; Cho, H.R.; Lee, H.S.; Ok, J.H.; Zhang, Y.S.; Kim, G.S.; Seo, Y.H. Effect of organic resources application on crop yield and soil physical preperties of upland. Korean J. Soil Sci. Fertil. 2017, 17, 157–158. [Google Scholar]
- Gao, P.; Qiu, H.; Lan, Y.; Wang, W.; Chen, W.; Han, X.; Lu, J. Modeling for the Prediction of Soil Moisture in Litchi Orchard with Deep Long Short-Term Memory. Agriculture 2022, 12, 25. [Google Scholar] [CrossRef]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning (ICML-10), Haifa, Israel, 21–24 June 2010; pp. 807–814. [Google Scholar]
- Glorot, X.; Bordes, A.; Bengio, Y. Deep sparse rectifier neural networks. In Proceedings of the Fourteenth International Conference on Artificial Intelligence and Statistics, Lauderdale, FL, USA, 11–13 April 2011; pp. 315–323. [Google Scholar]
- Filipović, N.; Brdar, S.; Mimić, G.; Marko, O.; Crnojević, V. Regional soil moisture prediction system based on Long Short-Term Memory network. Biosyst. Eng. 2021, 213, 30–38. [Google Scholar] [CrossRef]
- Gill, M.K.; Asefa, T.; Kemblowski, M.W.; McKee, M. Soil moisture prediction using support vector machines. J. Am. Water Resour. Assoc. 2006, 42, 1033–1046. [Google Scholar] [CrossRef]
- Hong, Z.; Kalbarczyk, Z.; Iyer, R.K. A data-driven approach to soil moisture collection and prediction. In Proceedings of the 2016 IEEE International Conference on Smart Computing (SMARTCOMP), St. Louis, MO, USA, 18–20 May 2016; pp. 1–6. [Google Scholar]
- Yu, J.; Tang, S.; Zhangzhong, L.; Zheng, W.; Wang, L.; Wong, A.; Xu, L. A Deep Learning Approach for Multi-Depth Soil Water Content Prediction in Summer Maize Growth Period. IEEE Access 2020, 8, 199097–199110. [Google Scholar] [CrossRef]
- Zhu, Q.; Liao, K.; Xu, Y.; Yang, G.; Wu, S.; Zhou, S. Monitoring and prediction of soil moisture spatial–temporal variations from a hydropedological perspective: A review. Soil Res. 2012, 50, 625–637. [Google Scholar] [CrossRef]
- Matei, O.; Rusu, T.; Petrovan, A.; Mihuţ, G. A Data Mining System for Real Time Soil Moisture Prediction. Procedia Eng. 2017, 181, 837–844. [Google Scholar] [CrossRef]
- Mathew, A.; Amudha, P.; Sivakumari, S. Deep learning techniques: An overview. In Advanced Machine Learning Technologies and Applications; Springer: Singapore, 2021; pp. 599–608. [Google Scholar]
- Moody, J.E.; Jones, J.N., Jr.; Lillard, J.H. Influence of straw mulch on soil moisture, soil temperature and the growth of corn. Soil Sci. Soc. Am. J. 1963, 27, 700–703. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Numerical Value |
|---|---|
| Outer Probe Diameter (Top/Bottom) | 30 mm/28.75 mm |
| Resolution | Moisture = 1:10,000/Salinity = 1:3000/Temperature= 0.3 °C |
| Moisture Precision | ±0.03% vol |
| Temperature Accuracy | ±2 °C @ 25 °C |
| Operating Temperature | −20 °C to +60 °C |
| Soil Depth | Input Variables | |||
|---|---|---|---|---|
| 10 cm, 20 cm, 30 cm | Two Input Factors SM (a) + One factor | Three Input Factors SM + Two factors | Four Input Factors SM + Three factors | Five Input Factors SM + Four factors |
| (P (b), RH (c), T (d), ST (e)) | (H + P, H + ST, ST + P, H + T, T + P, ST + T) | (ST + H + P, T + H + P, T + ST + H, T + ST + P) | (P + H + T + ST) | |
| Soil Depth | Performance | Two Input Factors | ||||
|---|---|---|---|---|---|---|
| SM (a) + P (b) | SM (a) + RH (c) | SM (a) + T (d) | SM (a) + ST (e) | |||
| 10 cm | R2 | 0.999 | 0.998 | 0.378 | 0.996 | |
| Loss (MSE) | 0.039 | 0.031 | 0.022 | 0.001 | ||
| Val_loss (MSE) | SET I | 0.123 | 0.238 | 47.133 | 1.347 | |
| SET II | 0.134 | 0.275 | 0.370 | 0.418 | ||
| 20 cm | R2 | 0.999 | 0.999 | 0.957 | 0.816 | |
| Loss (MSE) | 0.016 | 0.06 | 0.012 | 0.001 | ||
| Val_loss (MSE) | SET I | 0.098 | 0.170 | 11.903 | 46.323 | |
| SET II | 0.115 | 0.124 | 4.425 | 13.555 | ||
| 30 cm | R2 | 0.922 | 0.904 | 0.269 | 0.789 | |
| Loss (MSE) | 0.01 | 0.009 | 0.008 | 0.025 | ||
| Val_loss (MSE) | SET I | 7.975 | 3.895 | 463.175 | 26.258 | |
| SET II | 1.287 | 3.502 | 17.143 | 7.965 | ||
| Soil Depth | Performance | Input Factor | |||
|---|---|---|---|---|---|
| SM (a) + P (b) | |||||
| RH (c) | T (d) | ST (e) | |||
| 10 cm | R2 | 0.999 | 0.999 | 0.981 | |
| Loss (MSE) | 0.022 | 0.035 | 0.032 | ||
| Val_loss (MSE) | SET I | 0.105 | 0.247 | 5.569 | |
| SET II | 0.106 | 0.195 | 2.704 | ||
| 20 cm | R2 | 0.999 | 0.998 | 0.999 | |
| Loss (MSE) | 0.045 | 0.098 | 0.067 | ||
| Val_loss (MSE) | SET I | 0.122 | 0.476 | 0.062 | |
| SET II | 0.078 | 0.436 | 0.063 | ||
| 30 cm | R2 | 0.664 | 0.419 | 0.952 | |
| Loss (MSE) | 0.023 | 0.035 | 0.013 | ||
| Val_loss (MSE) | SET I | 25.893 | 30.989 | 50.439 | |
| SET II | 9.110 | 9.185 | 7.765 | ||
| Soil Depth | Performance | Input Factor | |||
|---|---|---|---|---|---|
| SM (a) + RH (c) | |||||
| P (b) | T (d) | ST (e) | |||
| 10 cm | R2 | 0.999 | 0.984 | 0.999 | |
| Loss (MSE) | 0.064 | 0.032 | 0.031 | ||
| Val_loss (MSE) | SET I | 0.105 | 4.728 | 0.224 | |
| SET II | 0.106 | 2.668 | 0.205 | ||
| 20 cm | R2 | 0.999 | 0.995 | 0.996 | |
| Loss (MSE) | 0.037 | 0.024 | 0.281 | ||
| Val_loss (MSE) | SET I | 0.122 | 1.191 | 1.834 | |
| SET II | 0.078 | 0.535 | 0.528 | ||
| 30 cm | R2 | 0.664 | 0.550 | 0.850 | |
| Loss (MSE) | 0.051 | 0.023 | 0.011 | ||
| Val_loss (MSE) | SET I | 25.893 | 25.428 | 22.297 | |
| SET II | 9.110 | 8.166 | 7.338 | ||
| Soil Depth | Performance | Input Factor | |||
|---|---|---|---|---|---|
| SM (a) + P (b) + RH (c) + T (d) | SM (a) + P (b) + RH (c) + ST (e) | SM (a) + P (b) + T (d) + ST (e) | |||
| 10 cm | R2 | 0.997 | 0.990 | 0.981 | |
| Loss (MSE) | 0.034 | 0.024 | 0.077 | ||
| Val_loss (MSE) | SET I | 0.678 | 2.770 | 5.924 | |
| SET II | 0.542 | 1.647 | 3.141 | ||
| 20 cm | R2 | 0.974 | 0.982 | 0.987 | |
| Loss (MSE) | 0.031 | 0.020 | 0.052 | ||
| Val_loss (MSE) | SET I | 5.669 | 8.768 | 3.620 | |
| SET II | 1.162 | 4.573 | 1.318 | ||
| 30 cm | R2 | 0.481 | 0.237 | 0.956 | |
| Loss (MSE) | 0.01 | 0.09 | 0.057 | ||
| Val_loss (MSE) | SET I | 21.387 | 33.792 | 5.837 | |
| SET II | 8.308 | 6.960 | 2.883 | ||
| Soil Depth | Performance | Input Factor | |
|---|---|---|---|
| SM (a) + P (b) + RH (c) + T (d) + ST (e) | |||
| 10 cm | R2 | 0.928 | |
| Loss (MSE) | 0.017 | ||
| Val_loss (MSE) | SET I | 20.225 | |
| SET II | 10.544 | ||
| 20 cm | R2 | 0.866 | |
| Loss (MSE) | 0.01 | ||
| Val_loss (MSE) | SET I | 24.764 | |
| SET II | 26.351 | ||
| 30 cm | R2 | 0.034 | |
| Loss (MSE) | 0.008 | ||
| Val_loss (MSE) | SET I | 45.110 | |
| SET II | 9.347 | ||
| Factors | R2 | Loss (MSE) | Val_Loss (MSE) | ||
|---|---|---|---|---|---|
| SET I | SET II | ||||
| 10 cm | SM,P | 0.999 | 0.039 | 0.123 | 0.134 |
| SM, P, RH | 0.999 | 0.022 | 0.105 | 0.106 | |
| SM, P, RH, T | 0.997 | 0.034 | 0.678 | 0.542 | |
| SM, P, RH, T, ST | 0.928 | 0.017 | 20.225 | 10.544 | |
| 20 cm | (a) SM, (b) P | 0.999 | 0.016 | 0.098 | 0.115 |
| SM, P, (e) ST | 0.999 | 0.067 | 0.062 | 0.063 | |
| SM, P, (d) T, ST | 0.987 | 0.052 | 3.620 | 1.318 | |
| SM, P, (c) RH, T, ST | 0.866 | 0.01 | 24.764 | 26.351 | |
| 30 cm | SM, P | 0.922 | 0.01 | 7.975 | 1.287 |
| SM, P, ST | 0.952 | 0.013 | 50.439 | 7.765 | |
| SM, P, T, ST | 0.956 | 0.057 | 5.837 | 2.883 | |
| SM, P, RH, T, ST | 0.034 | 0.008 | 45.110 | 9.347 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.-H.; Lee, B.-Y.; Kim, M.-J.; Sang, W.; Seo, M.C.; Baek, J.-K.; Yang, J.E.; Mo, C. Development of a Soil Moisture Prediction Model Based on Recurrent Neural Network Long Short-Term Memory (RNN-LSTM) in Soybean Cultivation. Sensors 2023, 23, 1976. https://doi.org/10.3390/s23041976
Park S-H, Lee B-Y, Kim M-J, Sang W, Seo MC, Baek J-K, Yang JE, Mo C. Development of a Soil Moisture Prediction Model Based on Recurrent Neural Network Long Short-Term Memory (RNN-LSTM) in Soybean Cultivation. Sensors. 2023; 23(4):1976. https://doi.org/10.3390/s23041976
Chicago/Turabian StylePark, Soo-Hwan, Bo-Young Lee, Min-Jee Kim, Wangyu Sang, Myung Chul Seo, Jae-Kyeong Baek, Jae E Yang, and Changyeun Mo. 2023. "Development of a Soil Moisture Prediction Model Based on Recurrent Neural Network Long Short-Term Memory (RNN-LSTM) in Soybean Cultivation" Sensors 23, no. 4: 1976. https://doi.org/10.3390/s23041976
APA StylePark, S.-H., Lee, B.-Y., Kim, M.-J., Sang, W., Seo, M. C., Baek, J.-K., Yang, J. E., & Mo, C. (2023). Development of a Soil Moisture Prediction Model Based on Recurrent Neural Network Long Short-Term Memory (RNN-LSTM) in Soybean Cultivation. Sensors, 23(4), 1976. https://doi.org/10.3390/s23041976