



UWB Sensing for UAV and Human Comparative Movement Characterization

 ,
,  ,
, 
Abstract
:1. Introduction
2. Theoretical Aspects
2.1. Wavelet Transform
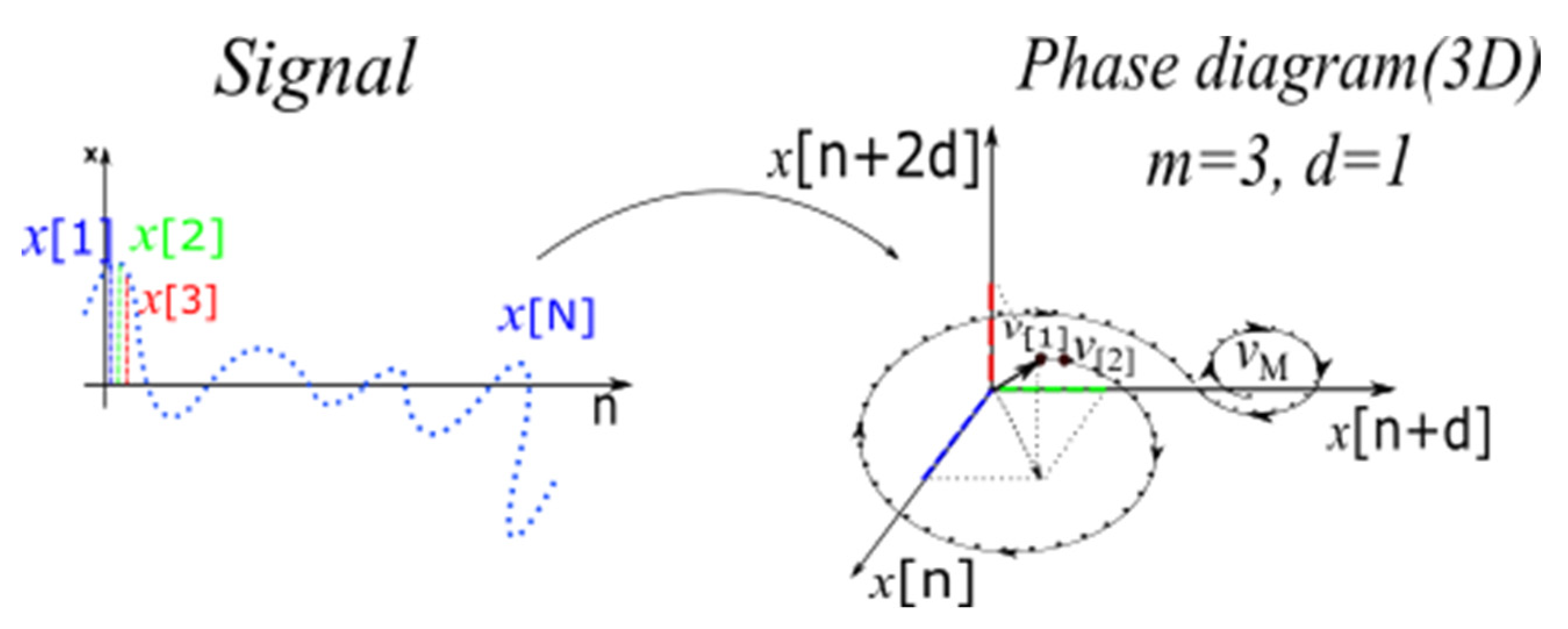
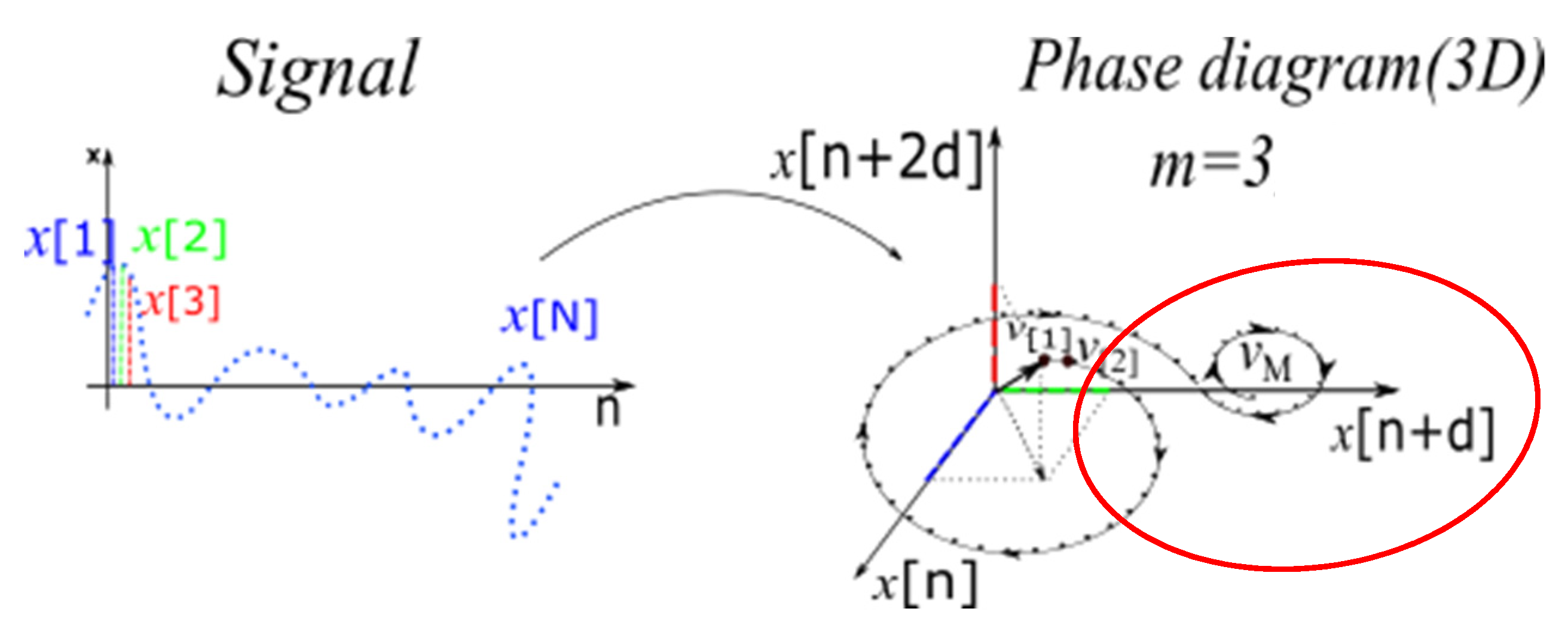
2.2. Phase Diagram
2.3. Phase Diagram Entropy
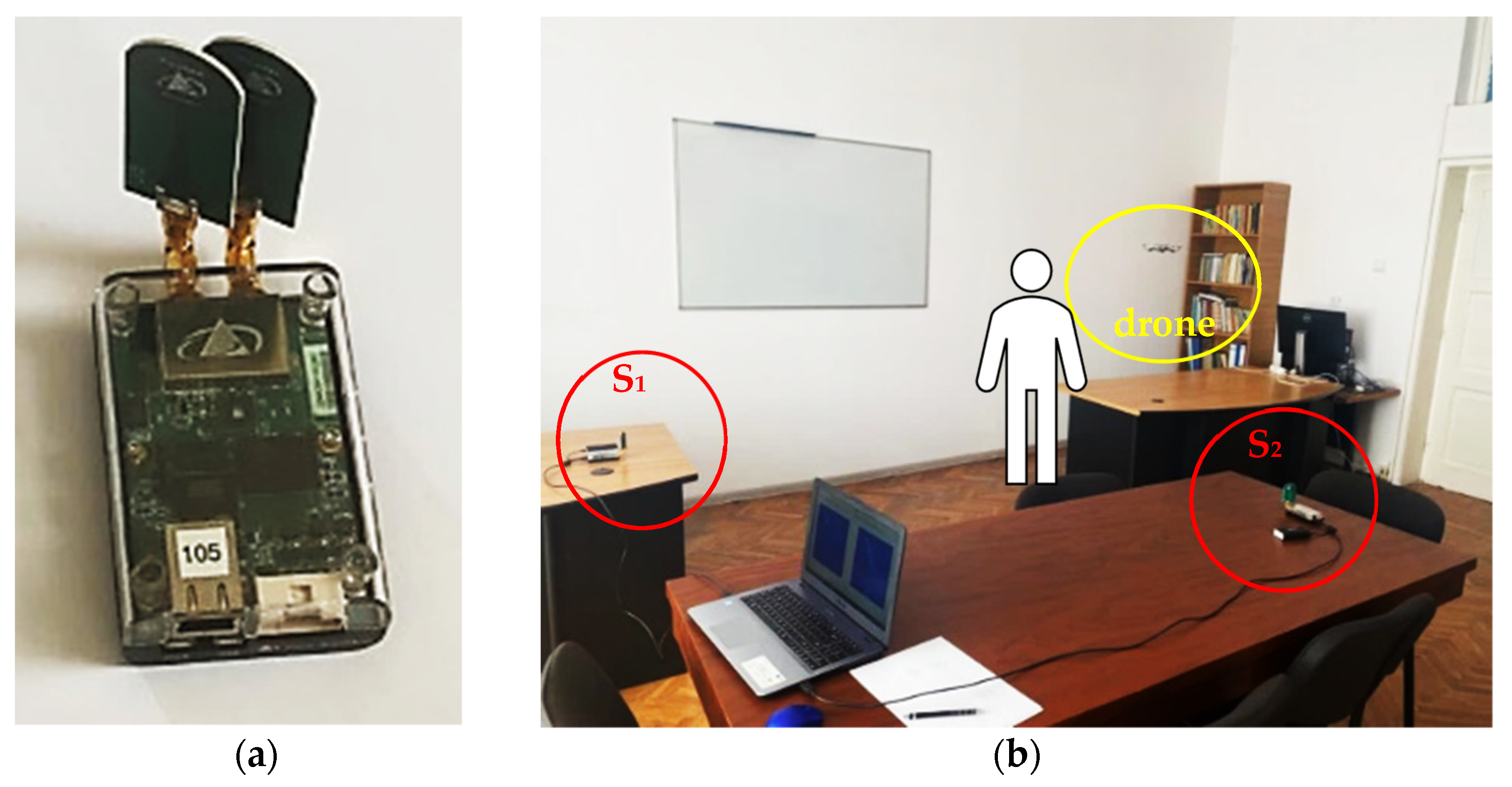
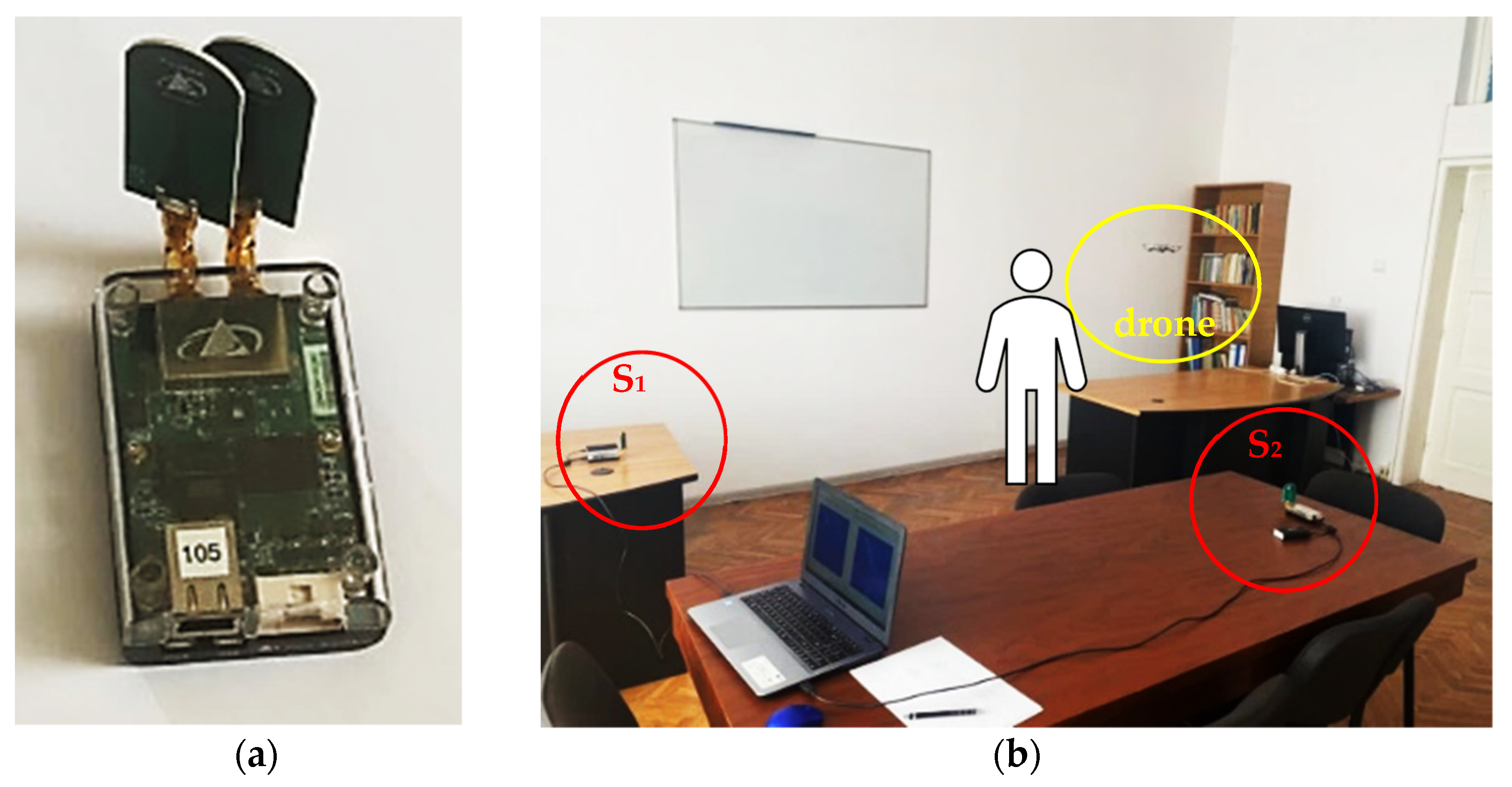
3. Experimental Setup
- The radar cross section (RCS) of a target can be seen as a comparison of the strength of the reflected signal from a target to the reflected signal from a perfectly smooth sphere with a cross-sectional area of 1 m2 [41]. As a rule, the larger an object, the stronger its radar reflection and thus the greater its RCS.
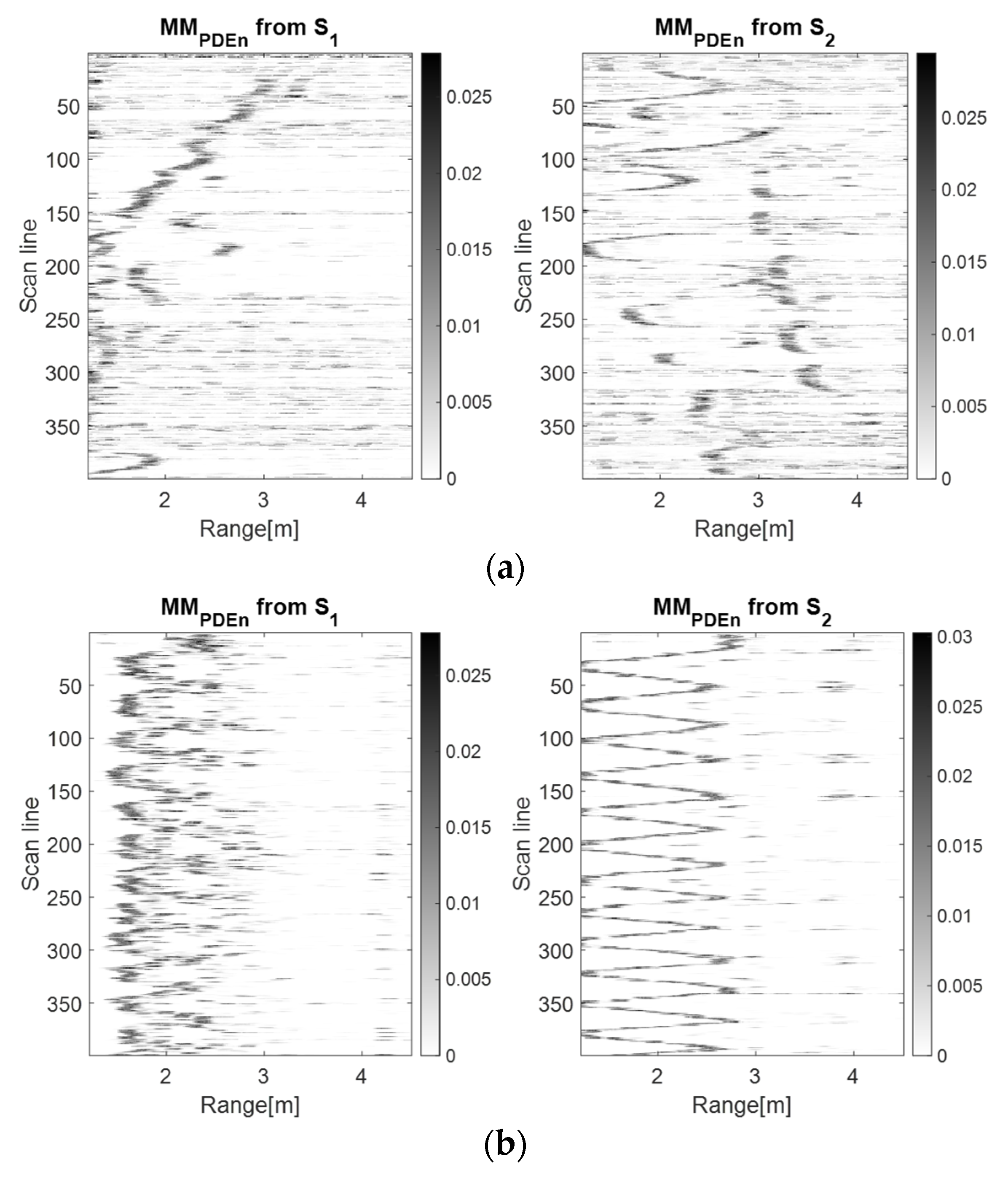
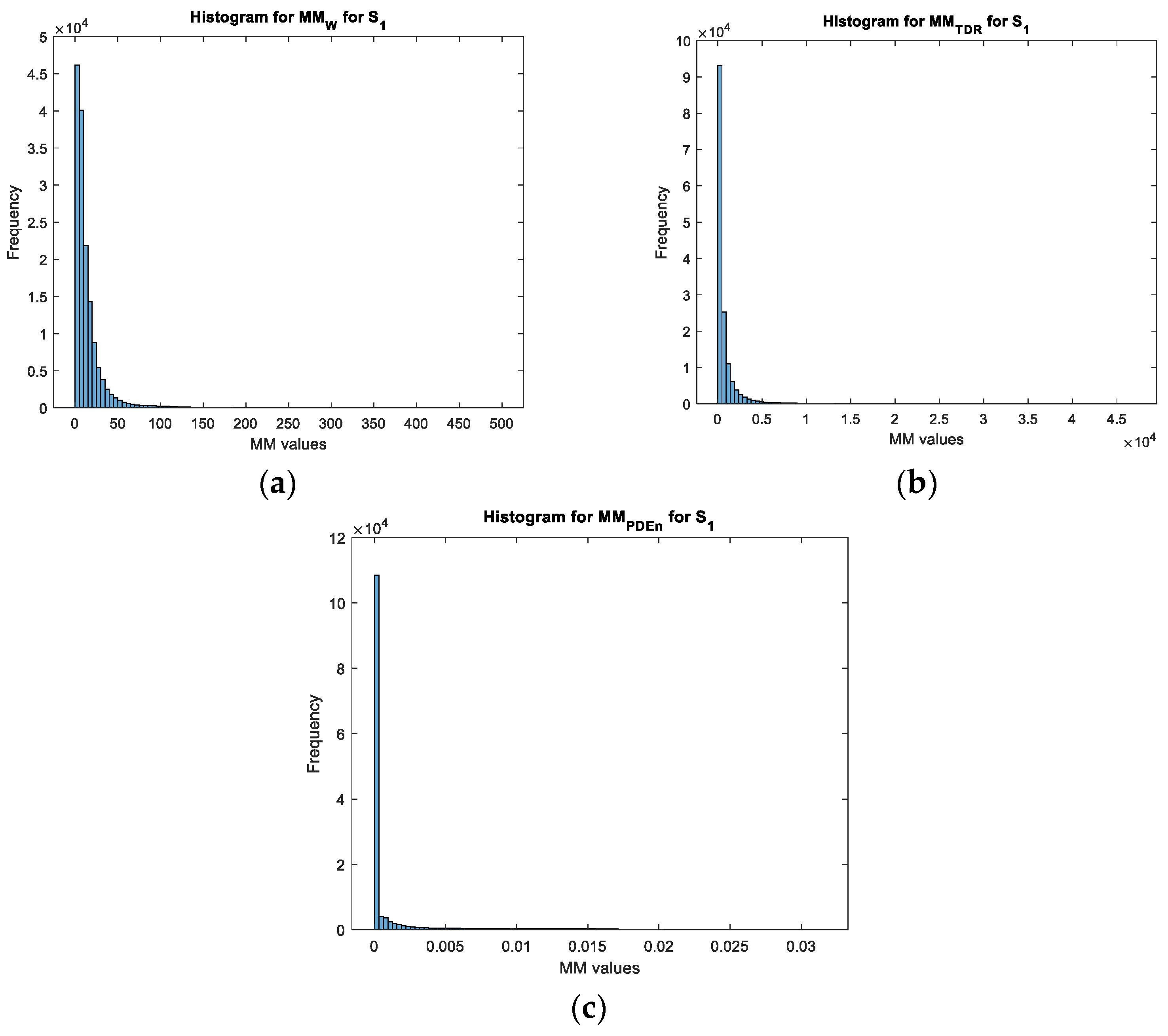
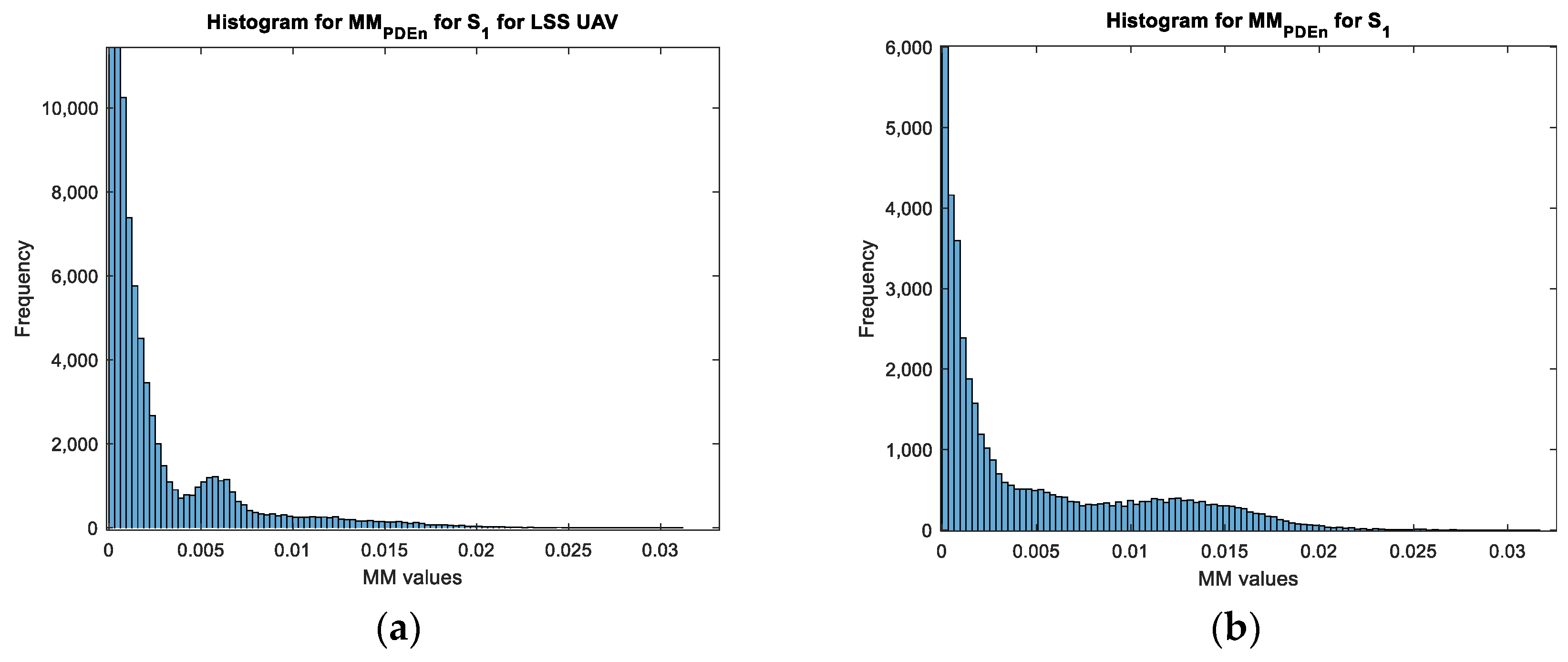
4. Results
4.1. Forward–Back Movement
4.2. Left–Right Movement
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Abro, G.E.M.; Zulkifli, S.A.B.M.; Masood, R.J.; Asirvadam, V.S.; Laouti, A. Comprehensive Review of UAV Detection, Security, and Communication Advancements to Prevent Threats. Drones 2022, 6, 284. [Google Scholar]
- Cavoukian, A. Privacy and Drones: Unmanned Aerial Vehicle; Information and Privacy Commissioner: Toronto, ON, Canada, 2012. [Google Scholar]
- Siddiqi, M.A.; Iwendi, C.; Jaroslava, K.; Anumbe, N. Analysis on security-related concerns of unmanned aerial vehicle: Attacks, limitations, and recommendations. Math. Biosci. Eng. 2022, 19, 2641–2670. [Google Scholar] [CrossRef] [PubMed]
- Dudush, A.; Tyutyunnik, V.; Trofymov, I.; Bortnovs’Kiy, S.; Bondarenko, S. State of the Art and Problems of Defeat of Low, Slow and Small Unmanned Aerial Vehicles. Adv. Mil. Technol. 2018, 13, 157–171. [Google Scholar] [CrossRef]
- Strohmeier, M.; Walter, T.; Rothe, J.; Montenegro, S. Ultra-Wideband Based Pose Estimation for Small Unmanned Aerial Vehicles. IEEE Access 2018, 6, 57526–57535. [Google Scholar]
- Hardin, P.J.; Jensen, R.R. Small-scale unmanned aerial vehicles in environmental remote sensing: Challenges and opportunities. GIScience Remote Sens. 2011, 48, 99–111. [Google Scholar]
- Jamil, S.; Abbas, M.S.; Roy, A.M. Distinguishing Malicious Drones Using Vision Transformer. AI 2022, 3, 260–273. [Google Scholar] [CrossRef]
- Isaac-Medina, B.K.S.; Poyser, M.; Organisciak, D.; Willcocks, C.G.; Breckon, T.P.; Shum, H.P.H. Unmanned Aerial Vehicle Visual Detection and Tracking using Deep Neural Networks: A Performance Benchmark. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, BC, Canada, 11–17 October 2021; pp. 1223–1232. [Google Scholar]
- Siriphun, N.; Kashihara, S.; Fall, D.; Khurat, A. Distinguishing Drone Types Based on Acoustic Wave by IoT Device. In Proceedings of the 2018 22nd International Computer Science and Engineering Conference (ICSEC), Chiang Mai, Thailand, 21–24 November 2018; pp. 1–4. [Google Scholar]
- Coluccia, A.; Parisi, G.; Fascista, A. Detection and classification of multirotor drones in radar sensor networks: A review. Sensors 2020, 20, 4172. [Google Scholar]
- Basak, S.; Rajendran, S.; Pollin, S.; Scheers, B. Combined RF-Based Drone Detection and Classification. IEEE Trans. Cogn. Commun. Netw. 2021, 8, 111–120. [Google Scholar] [CrossRef]
- Al-Sa’D, M.F.; Al-Ali, A.; Mohamed, A.; Khattab, T.; Erbad, A. RF-based drone detection and identification using deep learning approaches: An initiative towards a large open source drone database. Futur. Gener. Comput. Syst. 2019, 100, 86–97. [Google Scholar] [CrossRef]
- Prakosa, J.A.; Widiyatmoko, B.; Bayuwati, D.; Wijonarko, S. Optoelectronics of Non-Contact Method to Investigate Propeller Rotation Speed Measurement of Quadrotor Helicopter. In Proceedings of the 2021 International Symposium on Electronics and Smart Devices (ISESD), Bandung, Indonesia, 29–30 June 2021; pp. 1–5. [Google Scholar]
- Liu, H.; Wei, Z.; Chen, Y.; Pan, J.; Lin, L.; Ren, Y. Drone Detection Based on an Audio-Assisted Camera Array. In Proceedings of the 2017 IEEE Third International Conference on Multimedia Big Data (BigMM), Laguna Hills, CA, USA, 19–17 April 2017; pp. 402–406. [Google Scholar]
- Taha, B.; Shoufan, A. Machine Learning-Based Drone Detection and Classification: State-of-the-Art in Research. IEEE Access 2019, 7, 138669–138682. [Google Scholar] [CrossRef]
- Jamil, S.; Fawad; Rahman, M.; Ullah, A.; Badnava, S.; Forsat, M.; Mirjavadi, S.S. Malicious UAV Detection Using Integrated Audio and Visual Features for Public Safety Applications. Sensors 2020, 20, 3923. [Google Scholar] [CrossRef] [PubMed]
- Zhang, T.; Hu, X.; Xiao, J.; Zhang, G. A Machine Learning Method for Vision-Based Unmanned Aerial Vehicle Systems to Understand Unknown Environments. Sensors 2020, 20, 3245. [Google Scholar] [CrossRef] [PubMed]
- Anwar, M.Z.; Kaleem, Z.; Jamalipour, A. Machine Learning Inspired Sound-Based Amateur Drone Detection for Public Safety Applications. IEEE Trans. Veh. Technol. 2019, 68, 2526–2534. [Google Scholar] [CrossRef]
- Javan, F.D.; Samadzadegan, F.; Gholamshahi, M.; Mahini, F.A. A Modified YOLOv4 Deep Learning Network for Vision-Based UAV Recognition. Drones 2022, 6, 160. [Google Scholar] [CrossRef]
- Lee, M.; Shin, S.G.; Jang, S.; Cho, W.; Kim, S.; Han, S.; Choi, C.; Kim, J.; Kim, Y.; Kim, S.H. Visual-based Landing Guidance System of UAV with Deep Learning Technique for Environments of Visual-detection Impairment. Int. J. Control. Autom. Syst. 2022, 20, 1735–1744. [Google Scholar] [CrossRef]
- Fu, H.; Abeywickrama, S.; Zhang, L.; Yuen, C. Low-Complexity Portable Passive Drone Surveillance via SDR-Based Signal Processing. IEEE Commun. Mag. 2018, 56, 112–118. [Google Scholar] [CrossRef]
- Ezuma, M.; Erden, F.; Anjinappa, C.K.; Ozdemir, O.; Guvenc, I. Detection and classification of UAVs using RF fingerprints in the presence of Wi-Fi and Bluetooth interference. IEEE Open J. Commun. Soc. 2019, 1, 60–76. [Google Scholar] [CrossRef]
- Medaiyese, O.; Ezuma, M.; Lauf, A.P.; Guvenc, I. Wavelet transform analytics for RF-based UAV detection and identification system using machine learning. Pervasive Mob. Comput. 2022, 82, 101569. [Google Scholar] [CrossRef]
- Chiper, F.-L.; Martian, A.; Vladeanu, C.; Marghescu, I.; Craciunescu, R.; Fratu, O. Drone Detection and Defense Systems: Survey and a Software-Defined Radio-Based Solution. Sensors 2022, 22, 1453. [Google Scholar] [CrossRef]
- Semkin, V.; Yin, M.; Hu, Y.; Mezzavilla, M.; Rangan, S. Drone Detection and Classification Based on Radar Cross Section Signatures. In Proceedings of the 2020 International Symposium on Antennas and Propagation (ISAP), Osaka, Japan, 25–28 January 2021; pp. 223–224. [Google Scholar] [CrossRef]
- Nemer, I.; Sheltami, T.; Ahmad, I.; Yasar, A.U.-H.; Abdeen, M.A.R. RF-Based UAV Detection and Identification Using Hierarchical Learning Approach. Sensors 2021, 21, 1947. [Google Scholar] [CrossRef]
- Aldowesh, A.; BinKhamis, T.; Alnuaim, T.; Alzogaiby, A. Low Power Digital Array Radar for Drone Detection and Micro-Doppler Classification. In Proceedings of the 2019 Signal Processing Symposium (SPSympo), Krakow, Poland, 17–19 September 2019; pp. 203–206. [Google Scholar]
- Shule, W.; Almansa, C.M.; Queralta, J.P.; Zou, Z.; Westerlund, T. Uwb-based localization for multi-uav systems and collaborative heterogeneous multi-robot systems. Procedia Comput. Sci. 2020, 175, 357–364. [Google Scholar]
- Nakamura, R.; Hadama, H. Characteristics of ultra-wideband radar echoes from a drone. IEICE Commun. Express 2017, 6, 530–534. [Google Scholar] [CrossRef]
- Malivert, F.; Labbani-Igbida, O.; Boeglen, H. Comparison and Improvement of 3D-Multilateration for Solving Simultaneous Localization of Drones and UWB Anchors. Appl. Sci. 2023, 13, 1002. [Google Scholar] [CrossRef]
- Jing, Y.; Qi, F.; Yang, F.; Cao, Y.; Zhu, M.; Li, Z.; Lei, T.; Xia, J.; Wang, J.; Lu, G. Respiration Detection of Ground Injured Human Target Using UWB Radar Mounted on a Hovering UAV. Drones 2022, 6, 235. [Google Scholar] [CrossRef]
- Digulescu, A.; Despina-Stoian, C.; Stănescu, D.; Popescu, F.; Enache, F.; Ioana, C.; Rădoi, E.; Rîncu, I.; Șerbănescu, A. New Approach of UAV Movement Detection and Characterization Using Advanced Signal Processing Methods Based on UWB Sensing. Sensors 2020, 20, 5904. [Google Scholar] [CrossRef]
- Digulescu, A.; Paun, M.; Vasile, C.; Petrut, T.; Deacu, D.; Ioana, C.; Tamas, R. Electrical arc surveillance and localization system based on advanced signal processing techniques. In Proceedings of the 2014 IEEE International Energy Conference (ENERGYCON), Cavtat, Croatia, 13–16 May 2014; pp. 426–430. [Google Scholar]
- Digulescu, A.; Ioana, C.; Serbanescu, A. Phase Diagram-Based Sensing with Adaptive Waveform Design and Recurrent States Quantification for the Instantaneous Frequency Law Tracking. Sensors 2019, 19, 2434. [Google Scholar] [CrossRef]
- Digulescu, A.; Murgan, I.; Ioana, C.; Candel, I.; Serbanescu, A. Applications of Transient Signal Analysis Using the Concept of Recurrence Plot Analysis. In Recurrence Plots and Their Quantifications: Expanding Horizons; Webber, C.L., Ioana, C., Marwan, N., Eds.; Springer Proceedings in Physics; Springer International Publishing: Cham, Switzerland, 2016; Volume 180, pp. 19–38. ISBN 978-3-319-29921-1. [Google Scholar]
- Ioana, C.; Jarrot, A.; Gervaise, C.; Stephan, Y.; Quinquis, A. Localization in Underwater Dispersive Channels Using the Time-Frequency-Phase Continuity of Signals. IEEE Trans. Signal Process. 2010, 58, 4093–4107. [Google Scholar] [CrossRef]
- Serbanescu, A.; Ioana, C.; Digulescu, A. Overview of our recent results in signal analysis using recurrence plots. Rev. Roum. Sci. 2018, 63, 172–177. [Google Scholar]
- Stanescu, D.; Digulescu, A.; Ioana, C.; Serbanescu, A. A Novel Approach for Characterization of Transient Signals Using the Phase Diagram Features. In Proceedings of the 2021 IEEE International Conference on Microwaves, Antennas, Communications and Electronic Systems (COMCAS), Tel Aviv, Israel, 1–3 November 2021; pp. 299–304. [Google Scholar] [CrossRef]
- Stanescu, D.; Digulescu, A.; Ioana, C.; Serbanescu, A. Entropy-Based Characterization of the Transient Phenomena—Systemic Approach. Mathematics 2021, 9, 648. [Google Scholar]
- FCC, ID. Available online: https://fccid.io/NUF-P440-A/User-Manual/User-Manual-2878444.pdf (accessed on 9 September 2022).
- Nicolaescu, I.; Oroian, T. Radar cross section. In Proceedings of the 5th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Service, Nis, Serbia, 7–9 October 2009; Volume 1, pp. 65–68. [Google Scholar] [CrossRef]
- Paljanos, A.; Munteanu, C.; Miclaus, S. Correlating electric and magnetic field strength with induced foot currents –occupational exposure assessment of personnel operating professional radio equipment. U.P.B. Sci. Bull. Series C 2016, 78, 149–160. [Google Scholar]
- Paljanos, A.; Miclaus, S.; Munteanu, C. Occupational exposure of personnel operating military radio equipment: Measurements and simulation. Electromagn. Biol. Med. 2015, 34, 221–227. [Google Scholar] [CrossRef] [PubMed]
- Naqvi, S.A.R.; Manoufali, M.; Mohammed, B.; Mobashsher, A.T.; Foong, D.; Abbosh, A.M. In Vivo Human Skin Dielectric Properties Characterization and Statistical Analysis at Frequencies From 1 to 30 GHz. IEEE Trans. Instrum. Meas. 2020, 70, 1–10. [Google Scholar] [CrossRef]
- FCC. Available online: https://apps.fcc.gov/els/GetAtt.html?id=187726&x (accessed on 9 September 2022).
- Productz Beta. Available online: https://productz.com/en/parrot-mambo-fpv/p/erJ4a (accessed on 9 September 2022).








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Digulescu, A.; Despina-Stoian, C.; Popescu, F.; Stanescu, D.; Nastasiu, D.; Sburlan, D. UWB Sensing for UAV and Human Comparative Movement Characterization. Sensors 2023, 23, 1956. https://doi.org/10.3390/s23041956
Digulescu A, Despina-Stoian C, Popescu F, Stanescu D, Nastasiu D, Sburlan D. UWB Sensing for UAV and Human Comparative Movement Characterization. Sensors. 2023; 23(4):1956. https://doi.org/10.3390/s23041956
Chicago/Turabian StyleDigulescu, Angela, Cristina Despina-Stoian, Florin Popescu, Denis Stanescu, Dragos Nastasiu, and Dragos Sburlan. 2023. "UWB Sensing for UAV and Human Comparative Movement Characterization" Sensors 23, no. 4: 1956. https://doi.org/10.3390/s23041956
APA StyleDigulescu, A., Despina-Stoian, C., Popescu, F., Stanescu, D., Nastasiu, D., & Sburlan, D. (2023). UWB Sensing for UAV and Human Comparative Movement Characterization. Sensors, 23(4), 1956. https://doi.org/10.3390/s23041956