
Influence of the Tikhonov Regularization Parameter on the Accuracy of the Inverse Problem in Electrocardiography



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. The Inverse Problem in Electrocardiography
2.2. Choice of the Regularization Parameter
2.2.1. L-Curve Method
2.2.2. Generalized Cross-Validation Method
2.2.3. Composite Residual and Smoothing Operator Method
2.2.4. Zero-Crossing Method
2.2.5. U-Curve Method
3. Analyses
3.1. Data
3.2. Predefined Interval
3.3. Statistical Analysis
3.4. Analyses
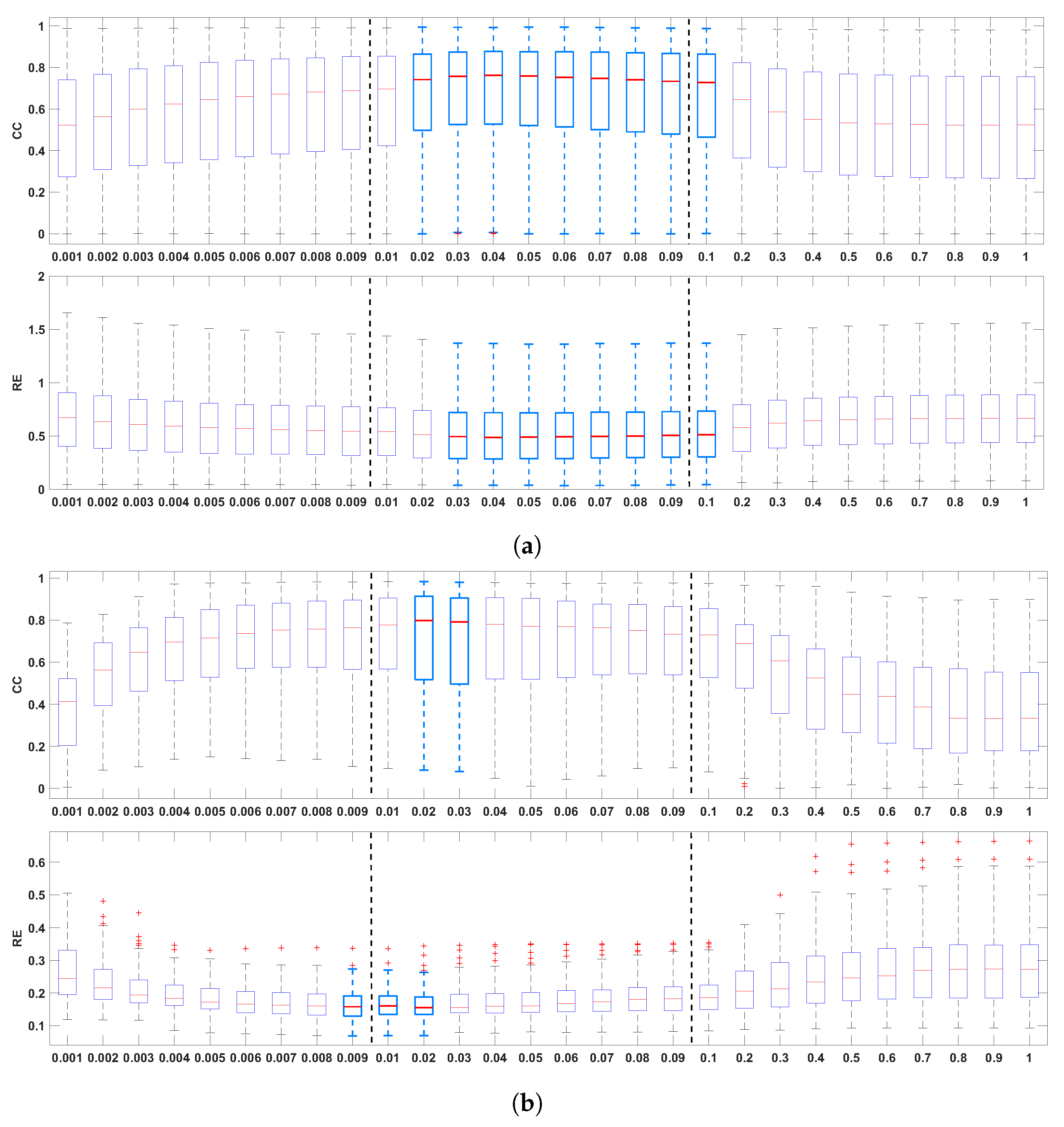
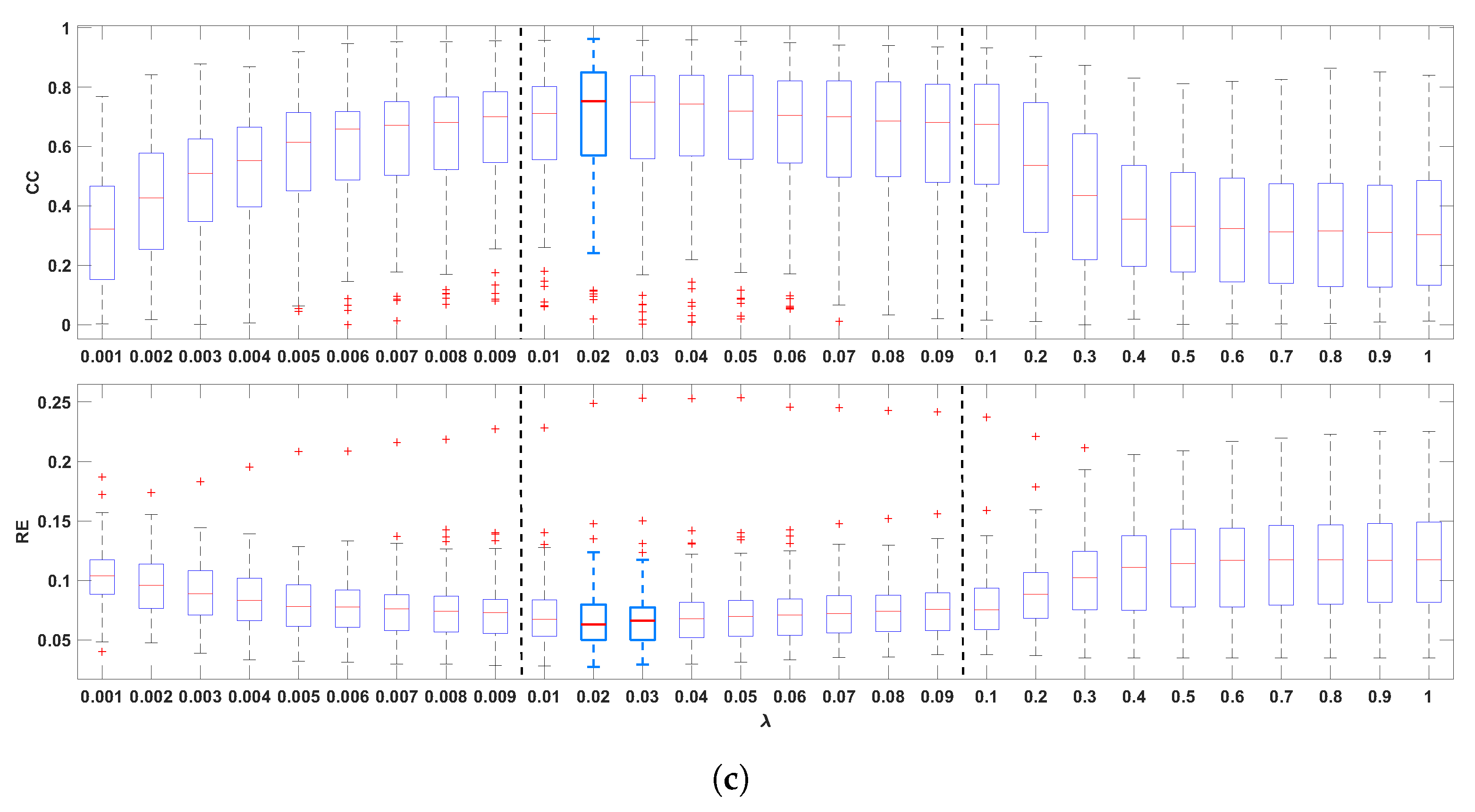
3.4.1. Influence of the Regularization Parameter on the ECGI Inverse Solution
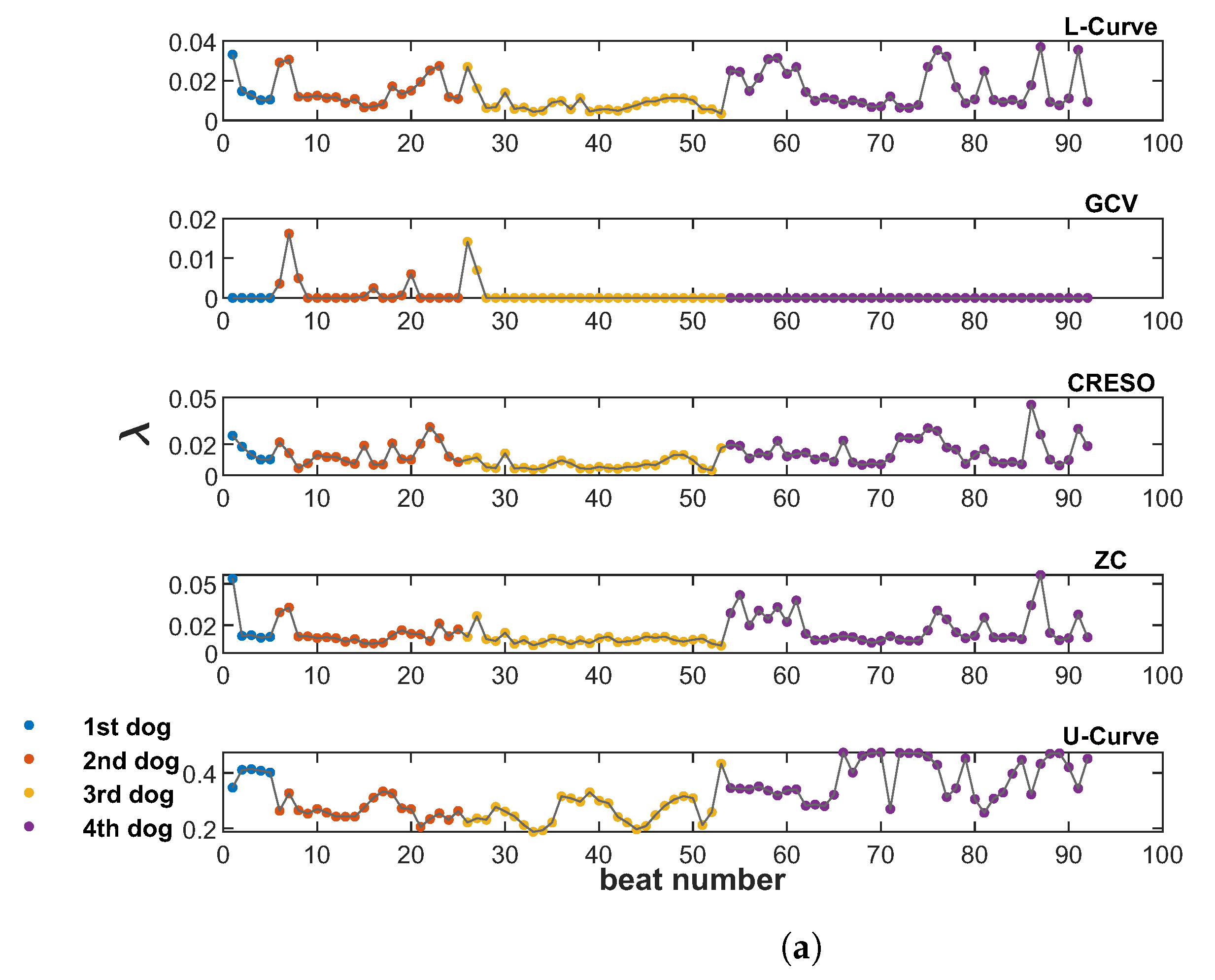
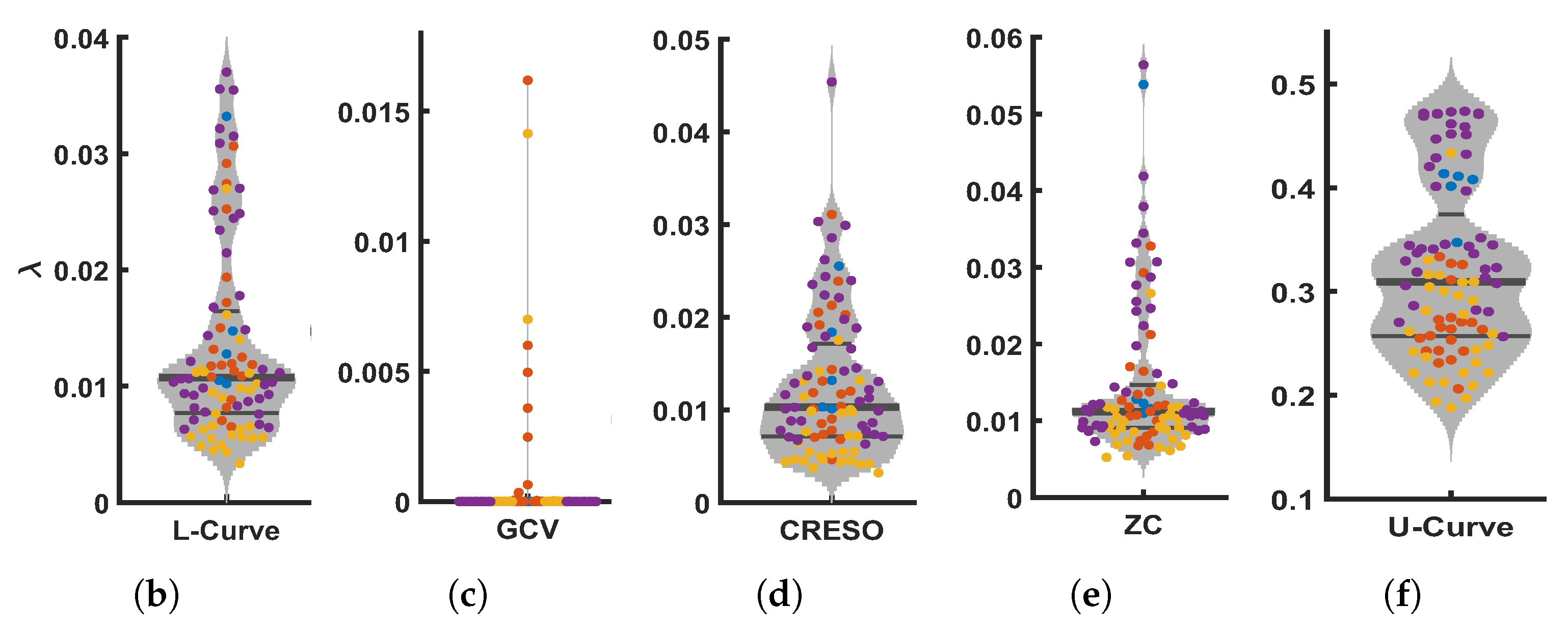
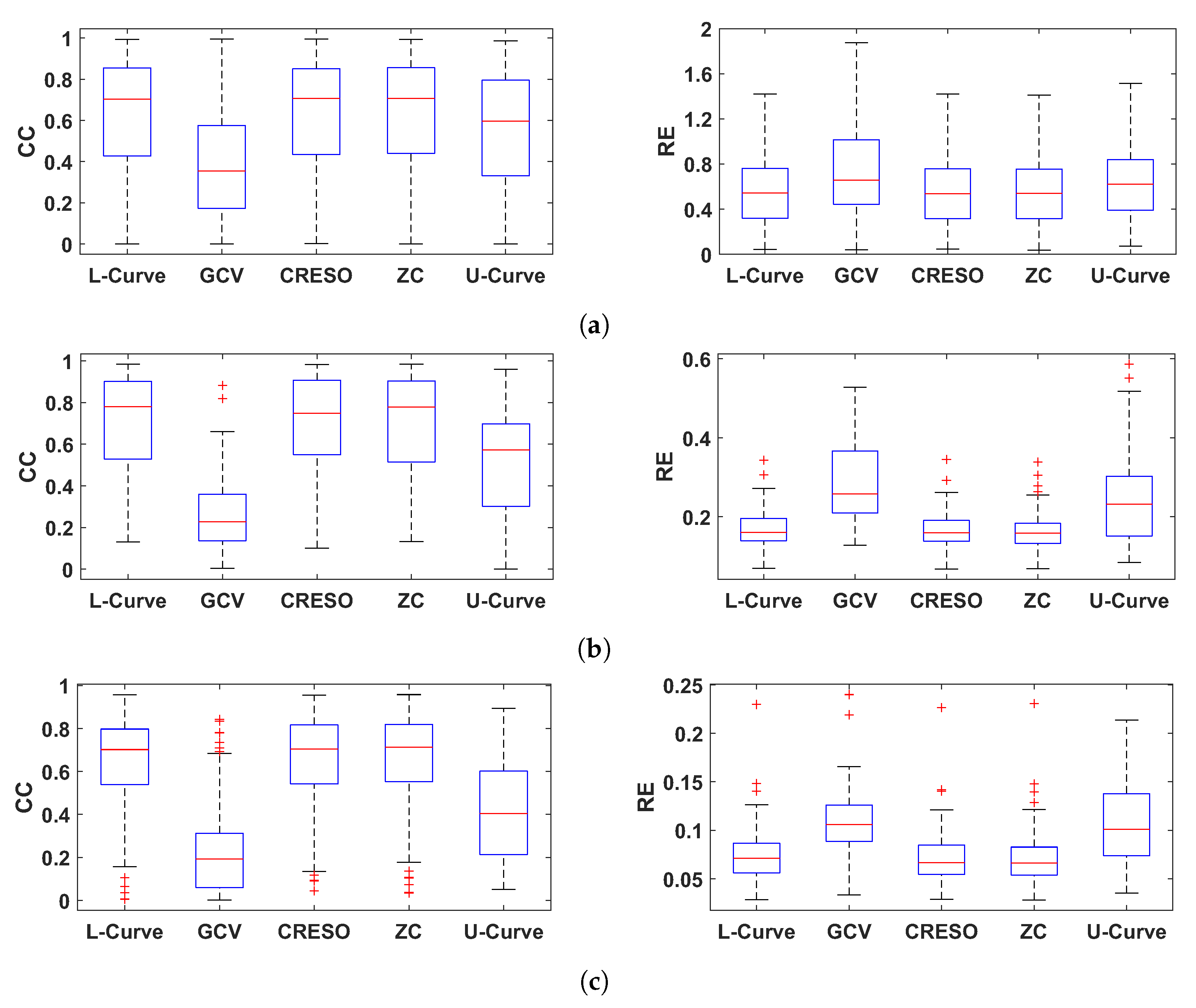
3.4.2. Performance of Different Regularization Parameter Estimation Methods
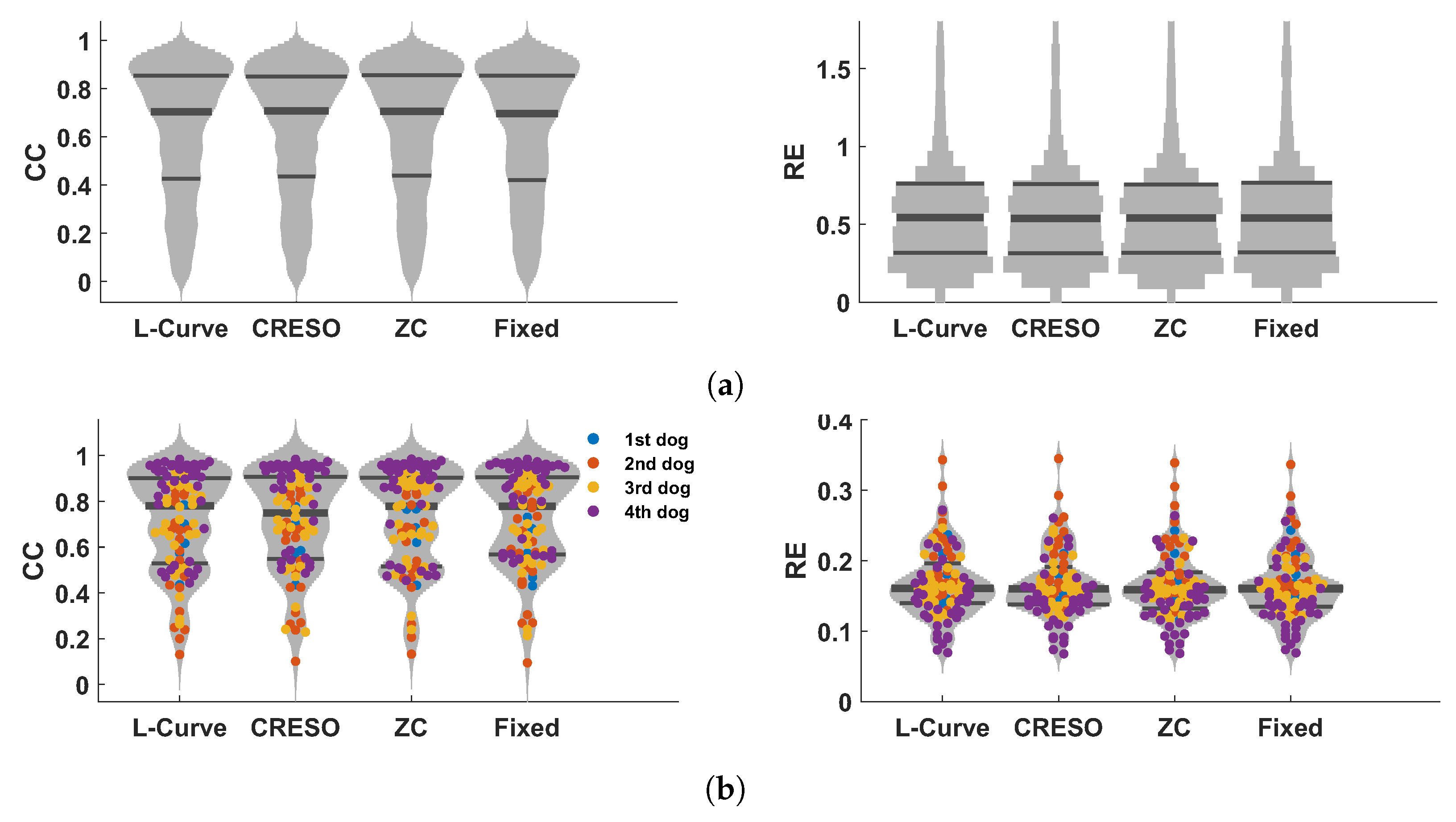
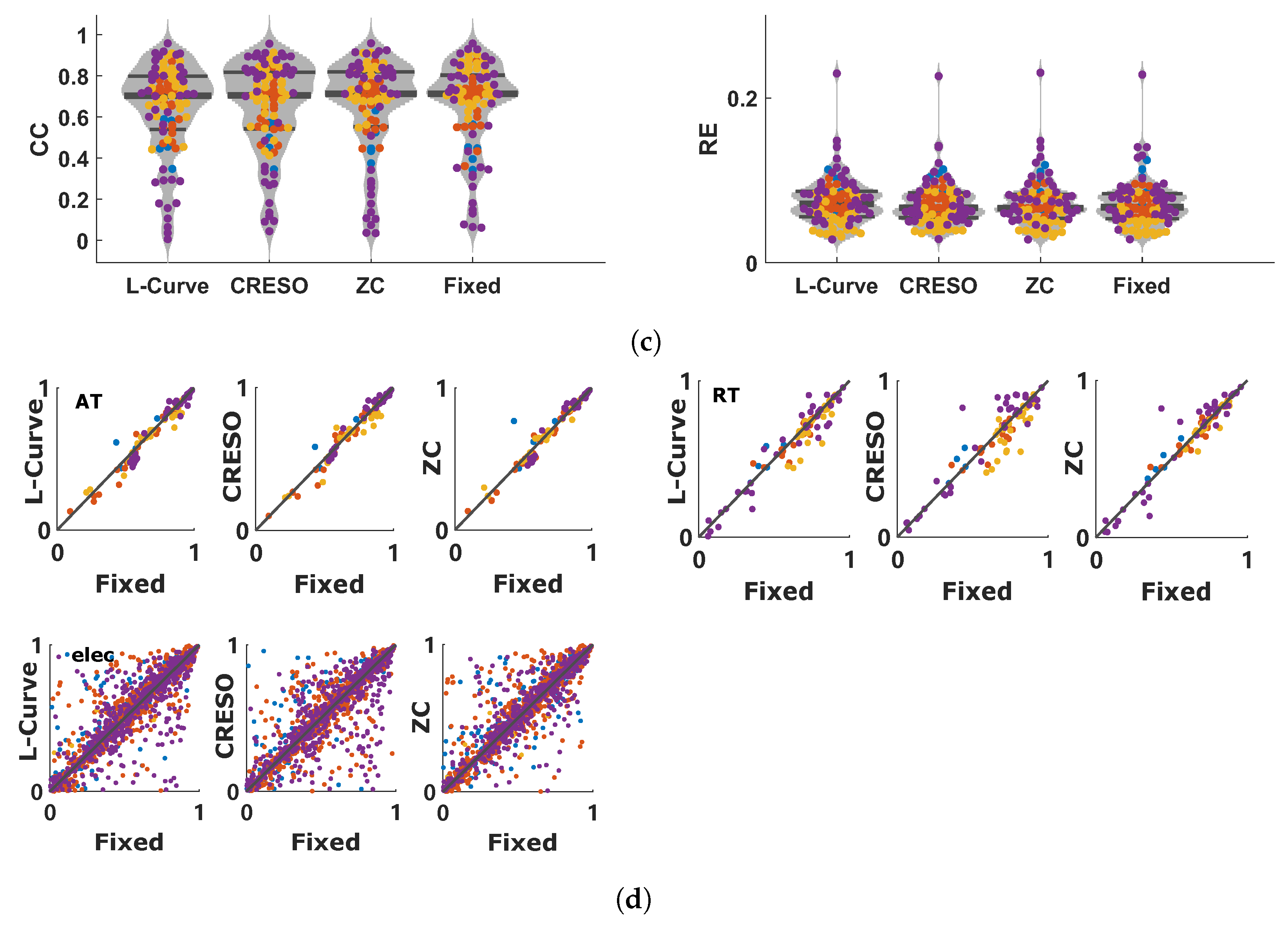
3.4.3. Effect of Using a Fixed Value of for All Beats
4. Results
4.1. Influence of the Regularization Parameter on the ECGI Inverse Solution
4.2. Performance of Different Regularization Parameter Estimation Methods
4.3. Effect of Using a Fixed Value of for All Beats
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Pereira, H.; Niederer, S.; Rinaldi, C.A. Electrocardiographic Imaging for Cardiac Arrhythmias and Resynchronization Therapy; Oxford University Press: Oxford, UK, 2020. [Google Scholar]
- Rudy, Y. Noninvasive electrocardiographic imaging of arrhythmogenic substrates in humans. Circ. Res. 2013, 112, 863–874. [Google Scholar] [CrossRef] [PubMed]
- Cluitmans, M.; Karel, J.; Bonizzi, P.; Volders, P.; Westra, R.; Peeters, R. Wavelet-promoted sparsity for non-invasive reconstruction of electrical activity of the heart. Med. Biol. Eng. Comput. 2018, 56, 2039–2050. [Google Scholar] [CrossRef] [PubMed]
- Cluitmans, M.J.; Clerx, M.; Vandersickel, N.; Peeters, R.L.; Volders, P.G.; Westra, R.L. Physiology-based regularization of the electrocardiographic inverse problem. Med. Biol. Eng. Comput. 2017, 55, 1353–1365. [Google Scholar] [CrossRef] [PubMed]
- Cluitmans, M.J.; Peeters, R.L.; Westra, R.L.; Volders, P.G. Noninvasive reconstruction of cardiac electrical activity: Update on current methods. Neth. Heart J. 2015, 23, 301–311. [Google Scholar] [CrossRef]
- Burton, B.M.; Tate, J.D.; Erem, B.; Swenson, D.J.; Wang, D.F.; Steffen, M.; Brooks, D.H.; Van Dam, P.M.; Macleod, R.S. A toolkit for forward/inverse problems in electrocardiography within the SCIRun problem solving environment. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Boston, MA, USA, 30 August–3 September 2011. [Google Scholar]
- Macfarlane, P.W.; Van Oosterom, A.; Pahlm, O.; Kligfield, P.; Janse, M.; Camm, J. (Eds.) Comprehensive Electrocardiology; Springer Science & Business Media: Berlin, Germany, 2010. [Google Scholar]
- Plonsey, R.; Barr, R.C. Quantitative Approach; Oxford University Press: New York, NY, USA, 2007. [Google Scholar]
- MacLeod, R.S.; Brooks, D.H. Recent progress in inverse problems in electrocardiology. IEEE Eng. Med. Biol. Mag. 1998, 17, 73–83. [Google Scholar] [CrossRef]
- Salinet, J.; Molero, R.; Schlindwein, F.S.; Karel, J.; Rodrigo, M.; Rojo-Álvarez, J.L.; Berenfeld, O.; Climent, A.M.; Zenger, B.; Vanheusden, F.; et al. Electrocardiographic imaging for atrial fibrillation: A perspective from computer models and animal experiments to clinical value. Front. Physiol. 2021, 12, 653013. [Google Scholar] [CrossRef] [PubMed]
- Kabanikhin, S.I. Definitions and examples of inverse and ill-posed problems. J. Inv. Ill-Posed Probl. 2008, 16, 317–357. [Google Scholar] [CrossRef]
- Figuera, C.; Suárez-Gutiérrez, V.; Hernández-Romero, I.; Rodrigo, M.; Liberos, A.; Atienza, F.; Guillem, M.S.; Barquero-Pérez, Ó.; Climent, A.M.; Alonso-Atienza, F. Regularization techniques for ECG imaging during atrial fibrillation: A computational study. Front. Physiol. 2016, 14, 466. [Google Scholar]
- Bauer, F.; Lukas, M.A. Accuracy of electrocardiographic imaging using the method of fundamental solutions. Comput. Biol. Med. 2018, 102, 433–448. [Google Scholar]
- Karoui, A.; Bear, L.; Migerditichan, P.; Zemzemi, N. Evaluation of fifteen algorithms for the resolution of the electrocardiography imaging inverse problem using ex-vivo and in-silico data. Front. Physiol. 2018, 9, 1708. [Google Scholar] [CrossRef]
- Rudy, Y.; Ramanathan, C.; Ghanem, R.; Jia, P. System and Methods for Noninvasive Electrocardiographic Imaging (ECGI) Using Generalized Minimum Residual (GMRes); Google Patents: Washington, DC, USA, 2006. [Google Scholar]
- Chamorro-Servent, J.; Dubois, R.; Coudière, Y. Exploring possible choices of the Tikhonov regularization parameter for the method of fundamental solutions in electrocardiography. In Proceedings of the Computing in Cardiology of the Conference, Rennes, France, 24–27 September 2017. [Google Scholar]
- Cluitmans, M.J.; Bonizzi, P.; Karel, J.M.; Das, M.; Kietselaer, B.L.; de Jong, M.M.; Prinzen, F.W.; Peeters, R.L.; Westra, R.L.; Volders, P.G. In vivo validation of electrocardiographic imaging. JACC Clin. Electrophysiol. 2017, 3, 232–242. [Google Scholar] [CrossRef] [PubMed]
- Hansen, P.C. Analysis of discrete ill-posed problems by means of the L-curve. SIAM Rev. 1992, 34, 561–580. [Google Scholar] [CrossRef]
- Lawson, C.L.; Hanson, R.J. Solving Least Squares Problems; SIAM: Philadelphia, PA, USA, 1995. [Google Scholar]
- Golub, G.H.; Heath, M.; Wahba, G. Generalized cross-validation as a method for choosing a good ridge parameter. Technometrics 1979, 21, 215–223. [Google Scholar] [CrossRef]
- Colli-Franzone, P.; Guerri, L.; Tentoni, S.; Viganotti, C.; Baruffi, S.; Spaggiari, S.; Taccardi, B. A mathematical procedure for solving the inverse potential problem of electrocardiography. Analysis of the time-space accuracy from in vitro experimental data. Math. Biosci. 1985, 77, 353–396. [Google Scholar] [CrossRef]
- Johnston, P.R.; Gulrajani, R.M. A new method for regularization parameter determination in the inverse problem of electrocardiography. IEEE Trans. Biomed. Eng. 1997, 44, 19–39. [Google Scholar] [CrossRef] [PubMed]
- Krawczyk-StanDo, D.; Rudnicki, M. Regularization parameter selection in discrete ill-posed problems–The use of the U-Curve. Int. J. Appl. Math. Comput. Sci. 2007, 17, 157. [Google Scholar] [CrossRef]
- Tikhonov, A.N. On the regularization of ill-posed problems. Doklady Akademii Nauk 1963, 153, 49–52. [Google Scholar]
- Ng, A.Y. Feature selection, L1 vs. L2 regularization, and rotational invariance. In Proceedings of the Twenty-First International Conference on Machine Learning, Banff, AB, Canada, 4–8 July 2004. [Google Scholar]
- Chamorro-Servent, J.; Dubois, R.; Coudière, Y. Considering new regularization parameter-choice techniques for the Tikhonov method to improve the accuracy of electrocardiographic imaging. Front. Physiol. 2019, 27, 273. [Google Scholar]
- Hansen, P.C.; O’Leary, D.P. The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 1993, 14, 1487–1503. [Google Scholar] [CrossRef]
- Bauer, F.; Lukas, M.A. Comparing parameter choice methods for regularization of ill-posed problems. Math. Comput. Simul. 2011, 81, 1795–1841. [Google Scholar] [CrossRef]
- Golub, G.H.; Von Matt, U. Generalized cross-validation for large-scale problems. J. Comput. Graph. Stat. 1997, 6, 1–34. [Google Scholar]
- Wahba, G. Practical approximate solutions to linear operator equations when the data are noisy. SIAM J. Numer. Anal. 1977, 14, 651–667. [Google Scholar] [CrossRef]
- Johnston, P.R.; Gulrajani, R.M. Selecting the corner in the L-curve approach to Tikhonov regularization. IEEE Trans. Biomed. Eng. 2000, 47, 1293–1296. [Google Scholar] [CrossRef] [PubMed]
- Chamorro-Servent, J.; Dubois, R.; Potse, M.; Coudière, Y. Improving the spatial solution of electrocardiographic imaging: A new regularization parameter choice technique for the Tikhonov method. In Proceedings of the International Conference on Functional Imaging and Modeling of the Heart, Toronto, ON, Canada, 11–13 June 2017. [Google Scholar]









Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Karel, J.; Bonizzi, P.; Peeters, R.L.M. Influence of the Tikhonov Regularization Parameter on the Accuracy of the Inverse Problem in Electrocardiography. Sensors 2023, 23, 1841. https://doi.org/10.3390/s23041841
Wang T, Karel J, Bonizzi P, Peeters RLM. Influence of the Tikhonov Regularization Parameter on the Accuracy of the Inverse Problem in Electrocardiography. Sensors. 2023; 23(4):1841. https://doi.org/10.3390/s23041841
Chicago/Turabian StyleWang, Tiantian, Joël Karel, Pietro Bonizzi, and Ralf L. M. Peeters. 2023. "Influence of the Tikhonov Regularization Parameter on the Accuracy of the Inverse Problem in Electrocardiography" Sensors 23, no. 4: 1841. https://doi.org/10.3390/s23041841
APA StyleWang, T., Karel, J., Bonizzi, P., & Peeters, R. L. M. (2023). Influence of the Tikhonov Regularization Parameter on the Accuracy of the Inverse Problem in Electrocardiography. Sensors, 23(4), 1841. https://doi.org/10.3390/s23041841