

Crowd-Aware Mobile Robot Navigation Based on Improved Decentralized Structured RNN via Deep Reinforcement Learning
Abstract
:1. Introduction
2. Related Works
2.1. Model-Based Methods
2.2. Learning-Based Methods
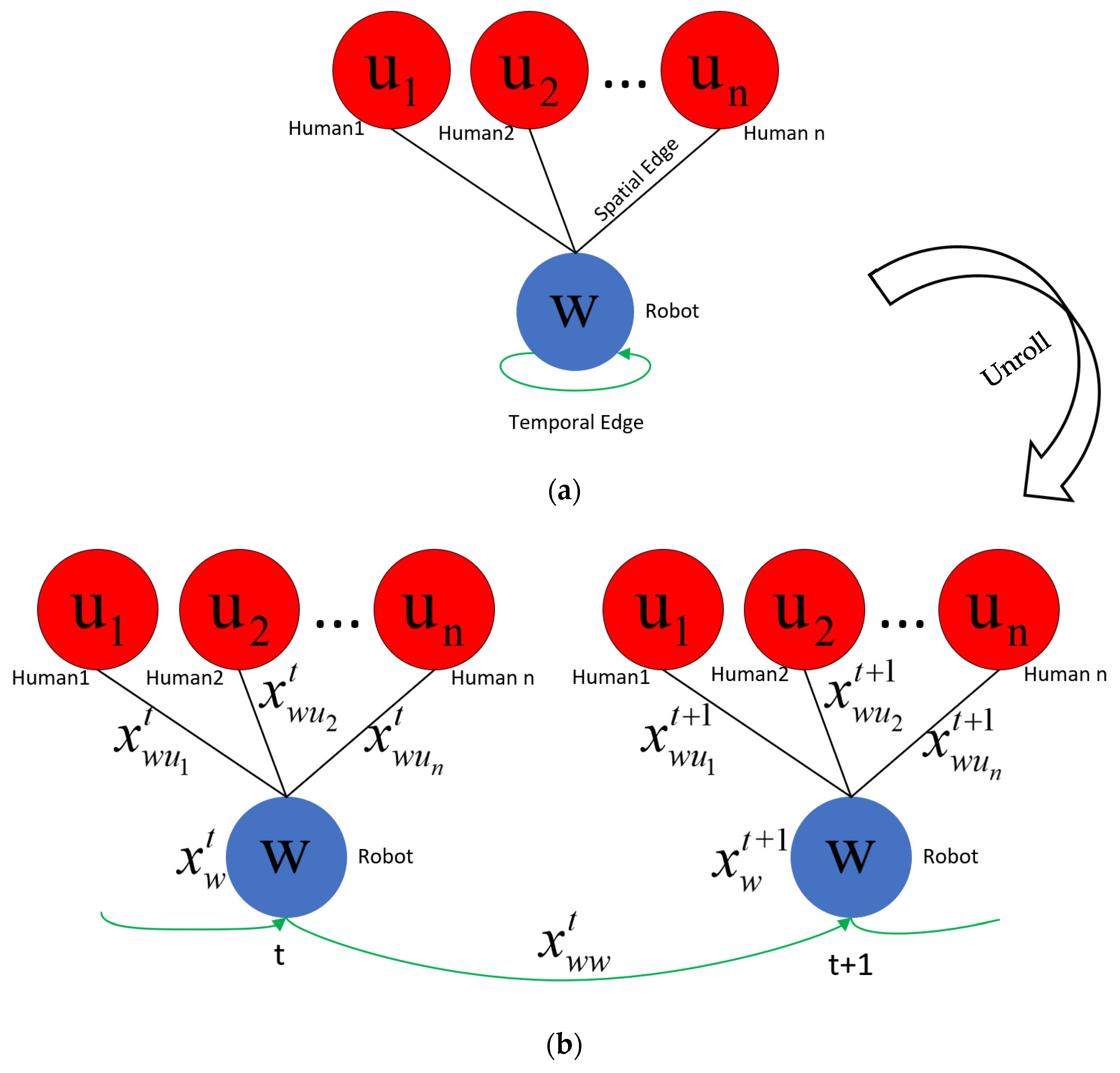
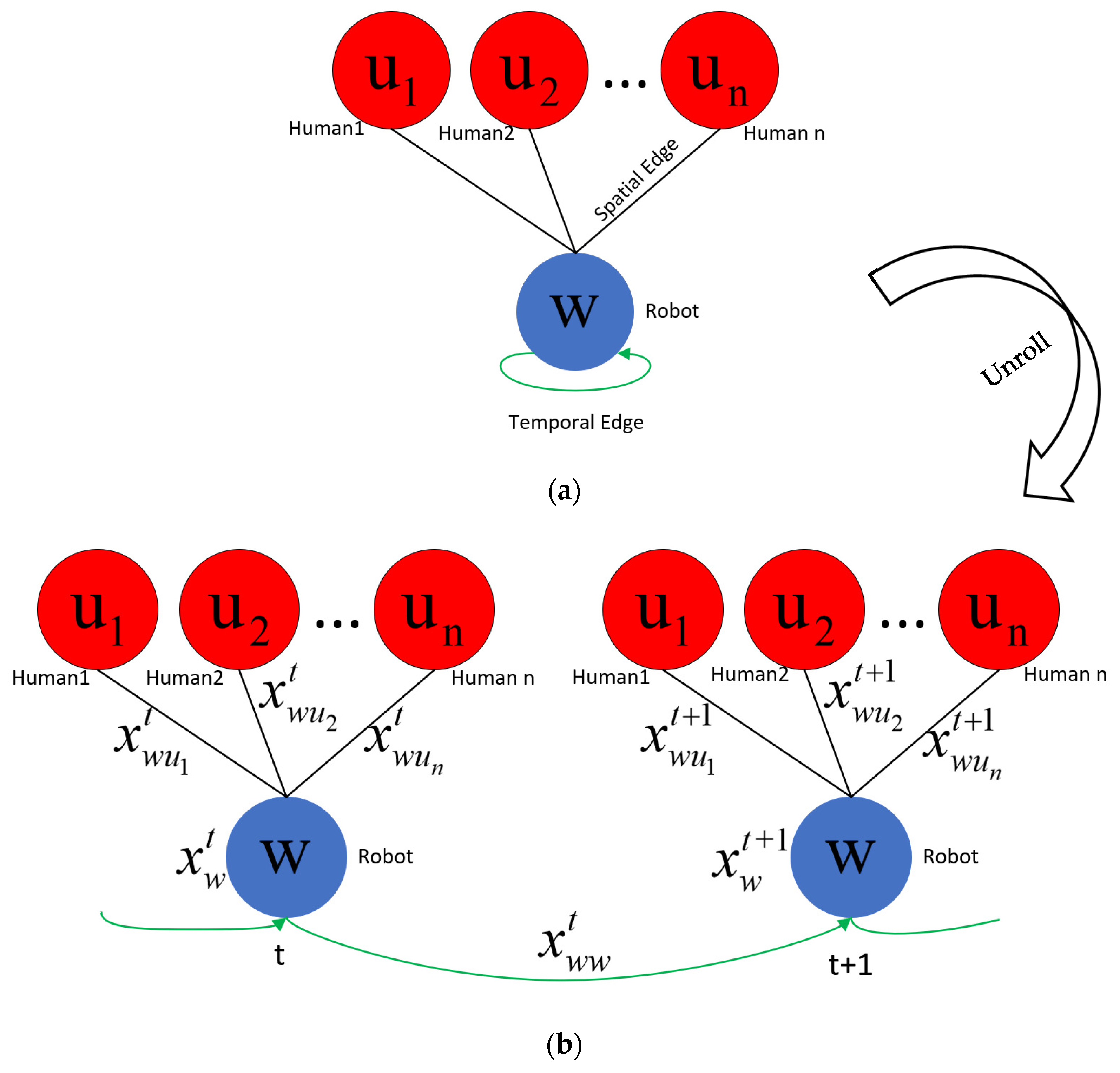
2.3. Spatio-Temporal Graph Methods
3. Approach
3.1. Problem Formulation
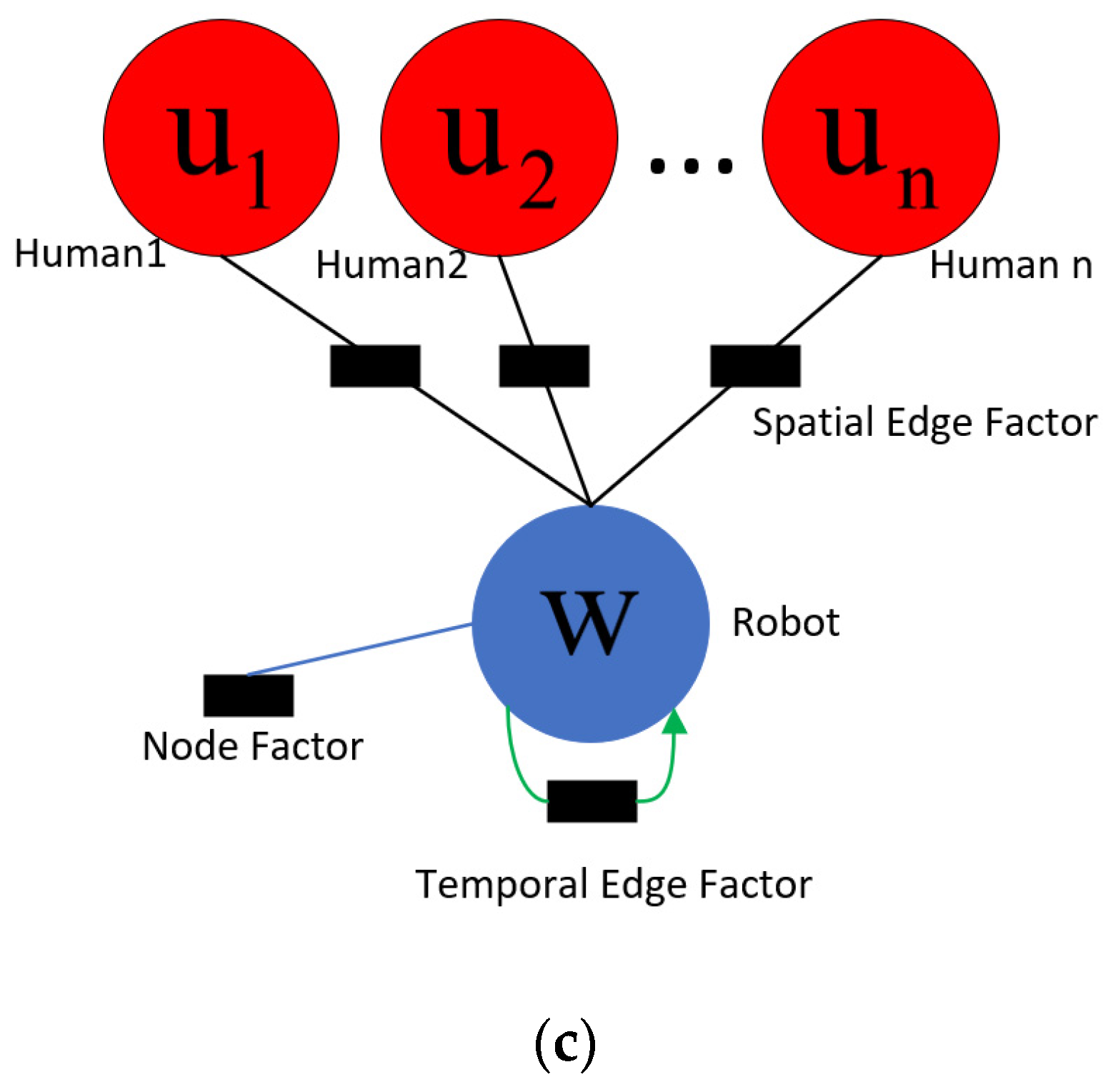
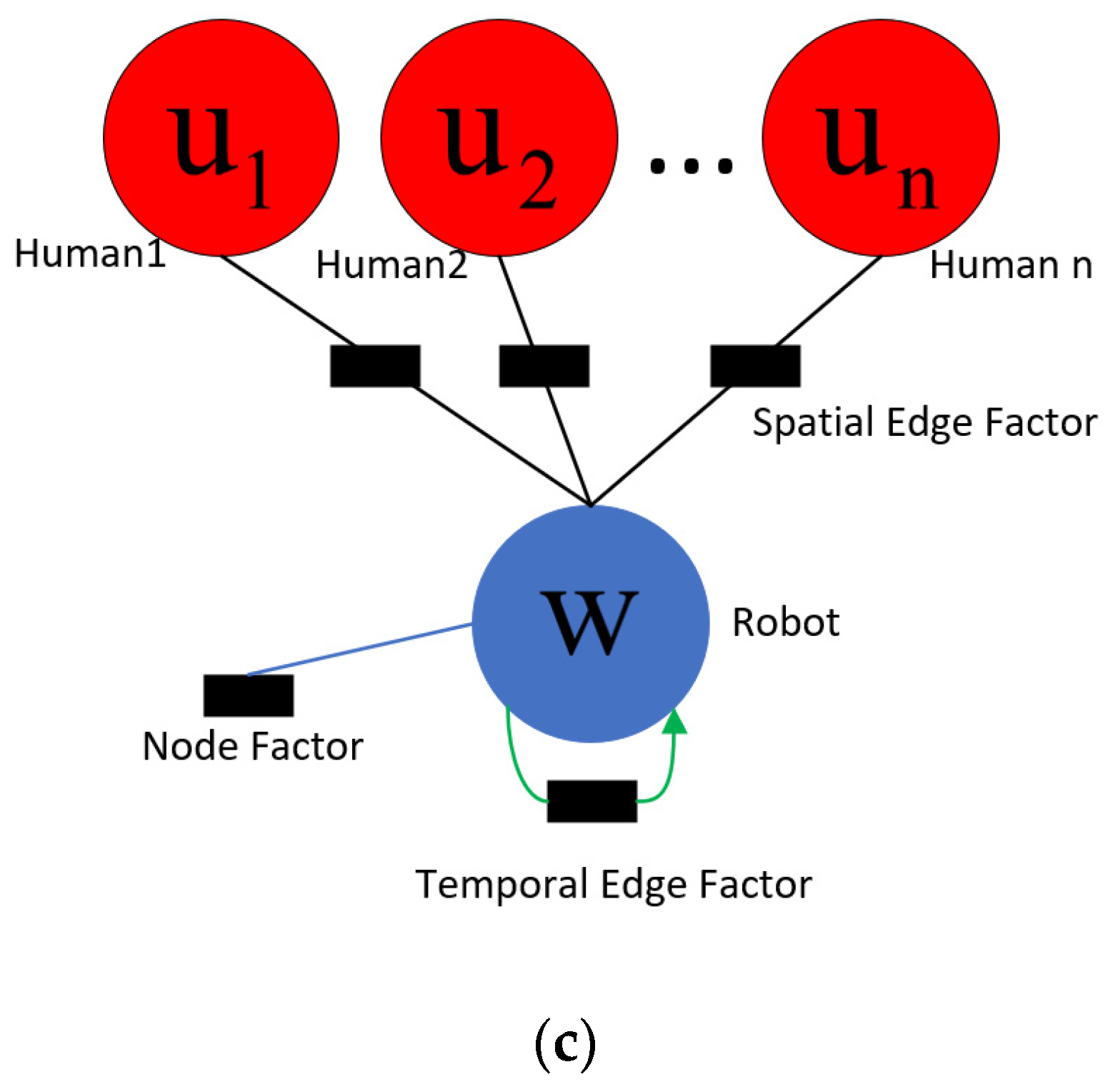
3.2. Modeling of Robot–Human Interactions
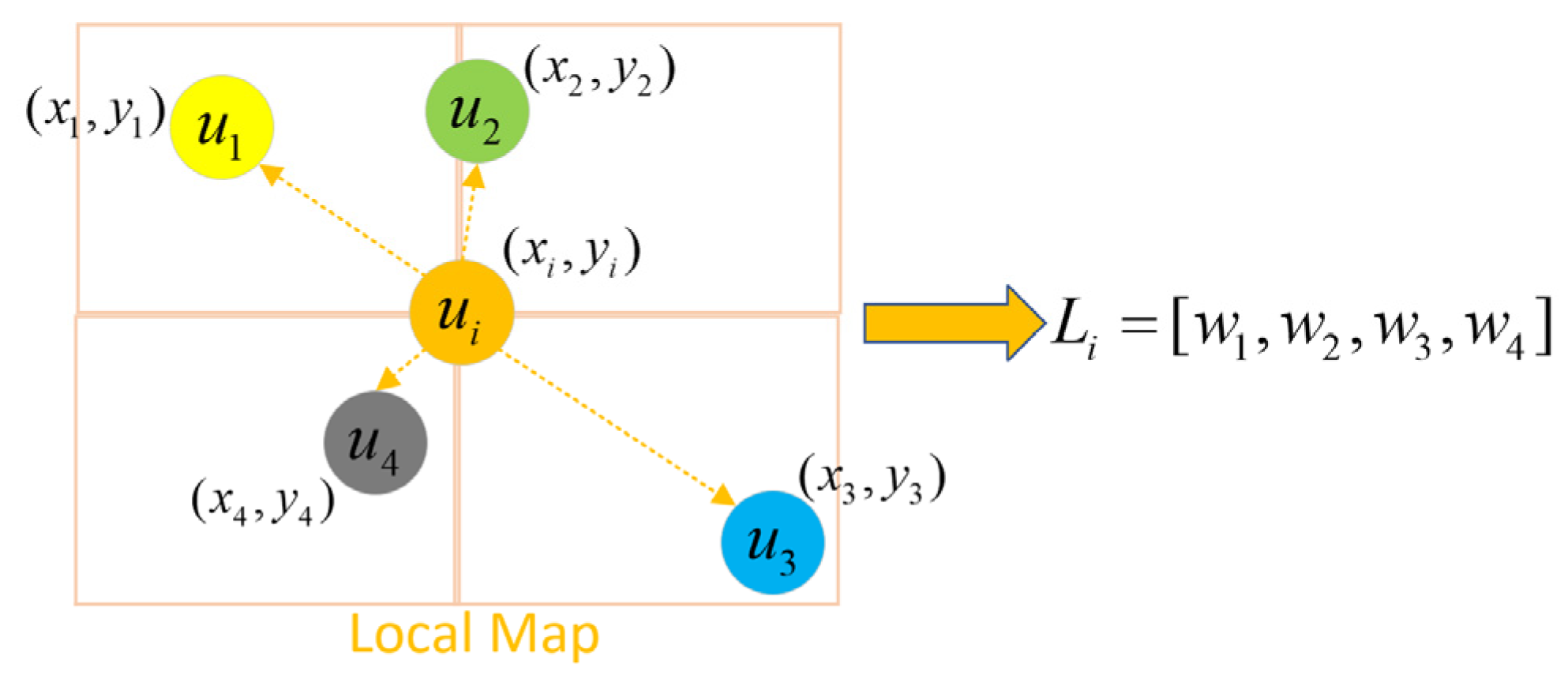
3.3. Modeling of Human–Human Interactions
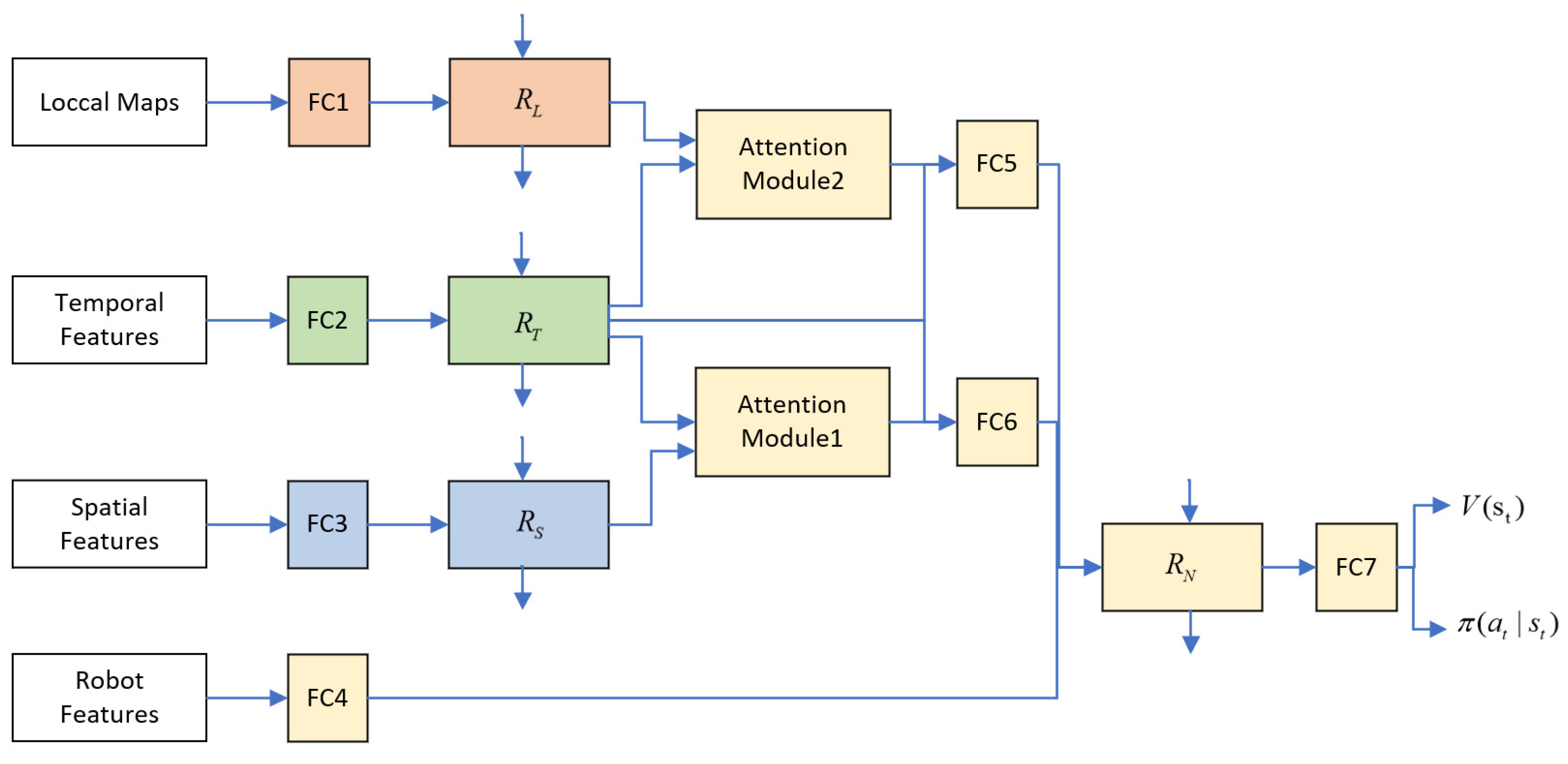
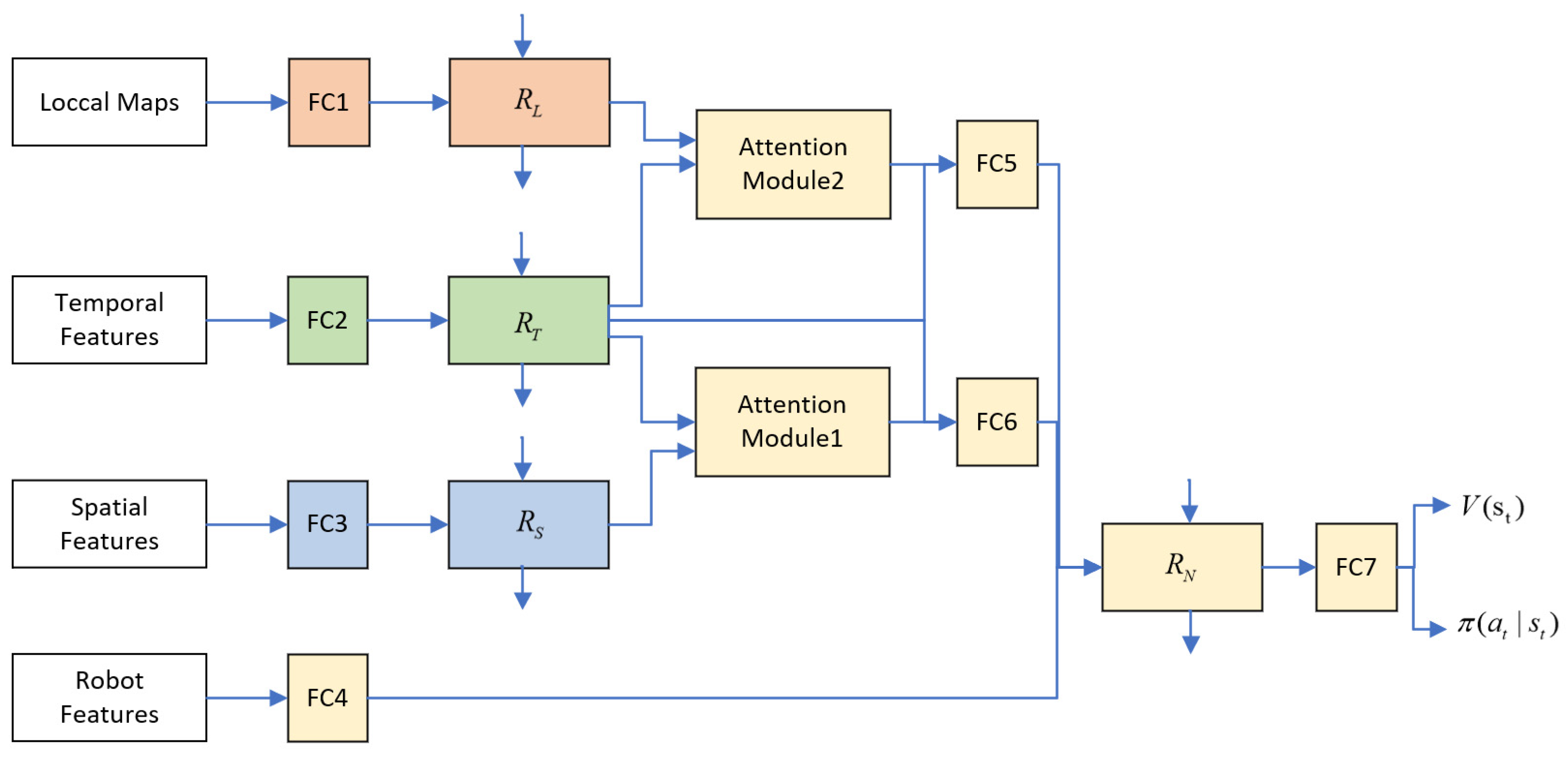
3.4. Neural Network
4. Experiments
4.1. Implementation Details
4.2. Simulation Setup
4.3. Quantitative Comparison
4.3.1. Robot Invisibility
4.3.2. Robot Visible
4.3.3. High-Density Environment
4.3.4. Model Effectiveness Analysis
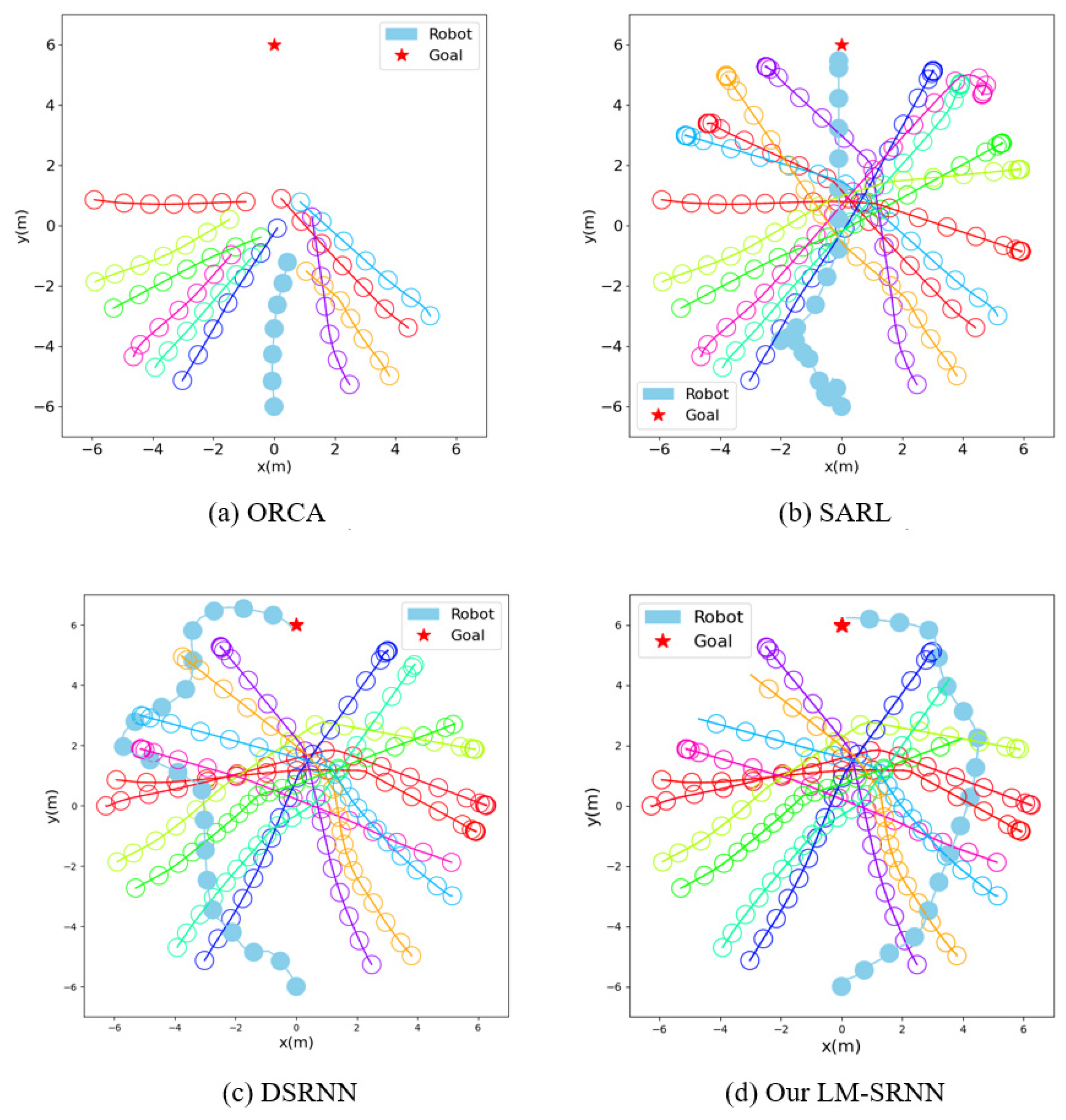
4.4. Qualitative Comparison
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Borenstein, J.; Koren, Y. Real-Time Obstacle Avoidance for Fast Mobile Robots in Cluttered Environments. In Proceedings of the IEEE International Conference on Robotics and Automation, Cincinnati, OH, USA, 13–18 May 1990; IEEE Computer Society Press: Washington, DC, USA, 1990; pp. 572–577. [Google Scholar]
- Fox, D.; Burgard, W.; Thrun, S. The Dynamic Window Approach to Collision Avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef]
- Kruse, T.; Pandey, A.K.; Alami, R.; Kirsch, A. Human-Aware Robot Navigation: A Survey. Robot. Auton. Syst. 2013, 61, 1726–1743. [Google Scholar] [CrossRef]
- Gupta, A.; Johnson, J.; Fei-Fei, L.; Savarese, S.; Alahi, A. Social GAN: Socially Acceptable Trajectories with Generative Adversarial Networks. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, IEEE, Salt Lake City, UT, USA, 18–22 June 2018; pp. 2255–2264. [Google Scholar]
- van den Berg, J.; Guy, S.J.; Lin, M.; Manocha, D. Reciprocal N-Body Collision Avoidance. In Robotics Research; Pradalier, C., Siegwart, R., Hirzinger, G., Eds.; Springer Tracts in Advanced Robotics; Springer: Berlin, Heidelberg, 2011; Volume 70, pp. 3–19. ISBN 978-3-642-19456-6. [Google Scholar]
- Helbing, D.; Molnár, P. Social Force Model for Pedestrian Dynamics. Phys. Rev. E 1995, 51, 4282–4286. [Google Scholar] [CrossRef] [PubMed]
- Kuderer, M.; Kretzschmar, H.; Sprunk, C.; Burgard, W. Feature-Based Prediction of Trajectories for Socially Compliant Navigation. In Robotics: Science and Systems VIII; MIT Press: Cambridge, MA, USA, 2013; pp. 193–200. [Google Scholar]
- Kretzschmar, H.; Spies, M.; Sprunk, C.; Burgard, W. Socially Compliant Mobile Robot Navigation via Inverse Reinforcement Learning. Int. J. Robot. Res. 2016, 35, 1289–1307. [Google Scholar] [CrossRef]
- Trautman, P.; Krause, A. Unfreezing the Robot: Navigation in Dense, Interacting Crowds. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, IEEE, Taipei, Taiwan, 18–22 October 2010; pp. 797–803. [Google Scholar]
- Fan, T.; Cheng, X.; Pan, J.; Long, P.; Liu, W.; Yang, R.; Manocha, D. Getting Robots Unfrozen and Unlost in Dense Pedestrian Crowds. IEEE Robot. Autom. Lett. 2019, 4, 1178–1185. [Google Scholar] [CrossRef]
- Chen, Y.F.; Liu, M.; Everett, M.; How, J.P. Decentralized Non-Communicating Multiagent Collision Avoidance with Deep Rein-forcement Learning. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, Singapore, 29 May–3 June 2017; pp. 285–292. [Google Scholar]
- Chen, Y.F.; Everett, M.; Liu, M.; How, J.P. Socially Aware Motion Planning with Deep Reinforcement Learning. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Vancouver, BC, Canada, 24–28 September 2017; pp. 1343–1350. [Google Scholar]
- Chen, C.; Hu, S.; Nikdel, P.; Mori, G.; Savva, M. Relational Graph Learning for Crowd Navigation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Las Vegas, NV, USA, 24 October–24 January 2020; pp. 10007–10013. [Google Scholar]
- Chen, C.; Liu, Y.; Kreiss, S.; Alahi, A. Crowd-Robot Interaction: Crowd-Aware Robot Navigation With Attention-Based Deep Reinforcement Learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), IEEE, Montreal, QC, Canada, 20–24 May 2019; pp. 6015–6022. [Google Scholar]
- Everett, M.; Chen, Y.F.; How, J.P. Motion Planning Among Dynamic, Decision-Making Agents with Deep Reinforcement Learning. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), IEEE, Madrid, Spain, 1–5 October 2018; pp. 3052–3059. [Google Scholar]
- Chen, Y.; Liu, C.; Shi, B.E.; Liu, M. Robot Navigation in Crowds by Graph Convolutional Networks With Attention Learned From Human Gaze. IEEE Robot. Autom. Lett. 2020, 5, 2754–2761. [Google Scholar] [CrossRef]
- Liu, S.; Chang, P.; Liang, W.; Chakraborty, N.; Driggs-Campbell, K. Decentralized Structural-RNN for Robot Crowd Navigation with Deep Reinforcement Learning. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021–5 June 2021; pp. 3517–3524. [Google Scholar]
- van den Berg, J.; Lin, M.; Manocha, D. Reciprocal Velocity Obstacles for Real-Time Multi-Agent Navigation. In Proceedings of the 2008 IEEE International Conference on Robotics and Automation, IEEE, Pasadena, CA, USA, 19–23 May 2008; pp. 1928–1935.
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Long, P.; Liu, W.; Pan, J. Deep-Learned Collision Avoidance Policy for Distributed Multi-Agent Navigation. IEEE Robot. Autom. Lett. 2017, 2, 656–663. [Google Scholar] [CrossRef]
- Sadeghian, A.; Alahi, A.; Savarese, S. Tracking the Untrackable: Learning to Track Multiple Cues with Long-Term Dependencies. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), IEEE, Venice, Italy, 22–29 October 2017; pp. 300–311. [Google Scholar]
- Khodayar, M.; Wang, J. Spatio-Temporal Graph Deep Neural Network for Short-Term Wind Speed Forecasting. IEEE Trans. Sustain. Energy 2019, 10, 670–681. [Google Scholar] [CrossRef]
- Yu, B.; Yin, H.; Zhu, Z. Spatio-Temporal Graph Convolutional Networks: A Deep Learning Framework for Traffic Forecasting. In Proceedings of the Twenty-Seventh International Joint Conference on Artificial Intelligence, Stockholm, Sweden, 13–19 July 2018; pp. 3634–3640. [Google Scholar]
- Jain, A.; Zamir, A.R.; Savarese, S.; Saxena, A. Structural-RNN: Deep Learning on Spatio-Temporal Graphs. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), IEEE, Las Vegas, NV, USA, 27–30 June 2016; pp. 5308–5317. [Google Scholar]
- Matsuzaki, S.; Hasegawa, Y. Learning Crowd-Aware Robot Navigation from Challenging Environments via Distributed Deep Reinforcement Learning. In Proceedings of the 2022 International Conference on Robotics and Automation (ICRA), IEEE, Phila-delphia, PA, USA, 23–27 May 2022; pp. 4730–4736. [Google Scholar]
- Vemula, A.; Muelling, K.; Oh, J. Social Attention: Modeling Attention in Human Crowds. In Proceedings of the 2018 IEEE In-ternational Conference on Robotics and Automation (ICRA), IEEE, Brisbane, QLD, Australia, 21–25 May 2018; pp. 4601–4607. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, L.; Polosukhin, I. Attention Is All You Need. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Long Beach, CA, USA, 4–9 December 2017; pp. 5998–6008. [Google Scholar]
- Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; Klimov, O. Proximal Policy Optimization Algorithms. arXiv 2017, arXiv:1707.06347. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Success | Collision | Time | Discomfort | Min Distance |
|---|---|---|---|---|---|
| ORCA [5] | 0.34 | 0.66 | 15.29 | 0.25 | 0.08 |
| SARL [14] | 0.89 | 0.11 | 16.65 | 0.05 | 0.14 |
| DSRNN [17] | 0.96 | 0.04 | 18.75 | 0.06 | 0.19 |
| ST-RNN | 0.95 | 0.05 | 18.95 | 0.06 | 0.18 |
| LM-SRNN (Ours) | 0.99 | 0.01 | 16.43 | 0.02 | 0.20 |
| Method | Success | Collision | Time | Discomfort | Min Distance |
|---|---|---|---|---|---|
| ORCA [5] | 0.87 | 0.13 | 14.32 | 0.26 | 0.07 |
| SARL [14] | 0.98 | 0.02 | 14.31 | 0.02 | 0.15 |
| DSRNN [17] | 0.99 | 0.01 | 12.01 | 0.01 | 0.21 |
| ST-RNN (Ours) | 0.99 | 0.01 | 12.87 | 0.02 | 0.19 |
| LM-SRNN (Ours) | 1.00 | 0.00 | 11.97 | 0.00 | 0.23 |
| Method | Success | Collision | Timeout | Time | Min Distance |
|---|---|---|---|---|---|
| ORCA [5] | 0.45 | 0.01 | 0.54 | 19.66 | 0.05 |
| SARL [14] | 0.35 | 0.05 | 0.60 | 29.24 | 0.12 |
| DSRNN [17] | 0.94 | 0.02 | 0.04 | 17.71 | 0.18 |
| ST-RNN (Ours) | 0.93 | 0.03 | 0.04 | 18.01 | 0.19 |
| LM-SRNN (Ours) | 0.98 | 0.01 | 0.01 | 16.65 | 0.20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Feng, Z. Crowd-Aware Mobile Robot Navigation Based on Improved Decentralized Structured RNN via Deep Reinforcement Learning. Sensors 2023, 23, 1810. https://doi.org/10.3390/s23041810
Zhang Y, Feng Z. Crowd-Aware Mobile Robot Navigation Based on Improved Decentralized Structured RNN via Deep Reinforcement Learning. Sensors. 2023; 23(4):1810. https://doi.org/10.3390/s23041810
Chicago/Turabian StyleZhang, Yulin, and Zhengyong Feng. 2023. "Crowd-Aware Mobile Robot Navigation Based on Improved Decentralized Structured RNN via Deep Reinforcement Learning" Sensors 23, no. 4: 1810. https://doi.org/10.3390/s23041810
APA StyleZhang, Y., & Feng, Z. (2023). Crowd-Aware Mobile Robot Navigation Based on Improved Decentralized Structured RNN via Deep Reinforcement Learning. Sensors, 23(4), 1810. https://doi.org/10.3390/s23041810