

XACML for Mobility (XACML4M)—An Access Control Framework for Connected Vehicles

Abstract
:1. Introduction
- RQ: How can Attribute-Based Access Control (ABAC) fulfill connected vehicle requirements of signal access, time-based access, location-based access and frequency-based access control?
- We focus on the software residing in the application layer as opposed to the hardware layer inside of a vehicle;
- We do not consider physical access control of the vehicle and focus only on software-based access control mechanisms.
2. Background
2.1. Automotive Terminology
2.2. Vehicle Communication
- Vehicle to Device (V2D): V2D communication describes data exchange with any type of electronic device, for example, a smartphone running a vehicle application. The app may allow, for instance, HVAC remote control or charge monitoring for electric vehicles.
- Vehicle to Vehicle (V2V): V2V is typically mentioned alongside Vehicular Ad-Hoc Networks (VANETs). The key idea behind V2V is that vehicles on the road dynamically establish a wireless mesh network over which data can be exchanged. Some possible applications are reporting route obstacles in a decentralized manner by traffic information systems, collision warning systems, and adaptive cruise control [18].
- Vehicle to Infrastructure (V2I): V2I refers to the exchange of information between vehicles and road infrastructure, commonly referred to as Road-Side Units (RSUs). For example, road markings, traffic lights, signs as well as intersections.
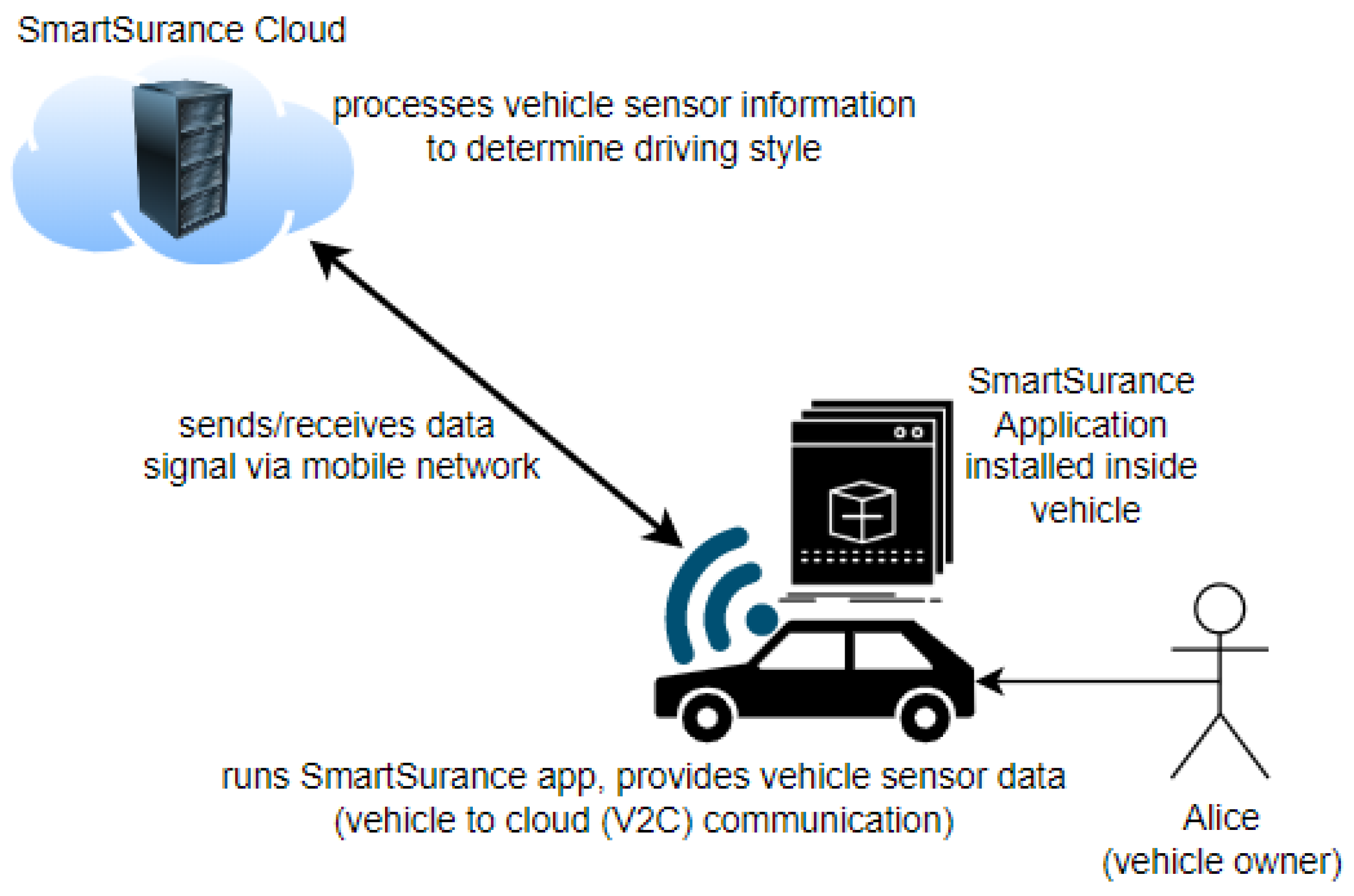
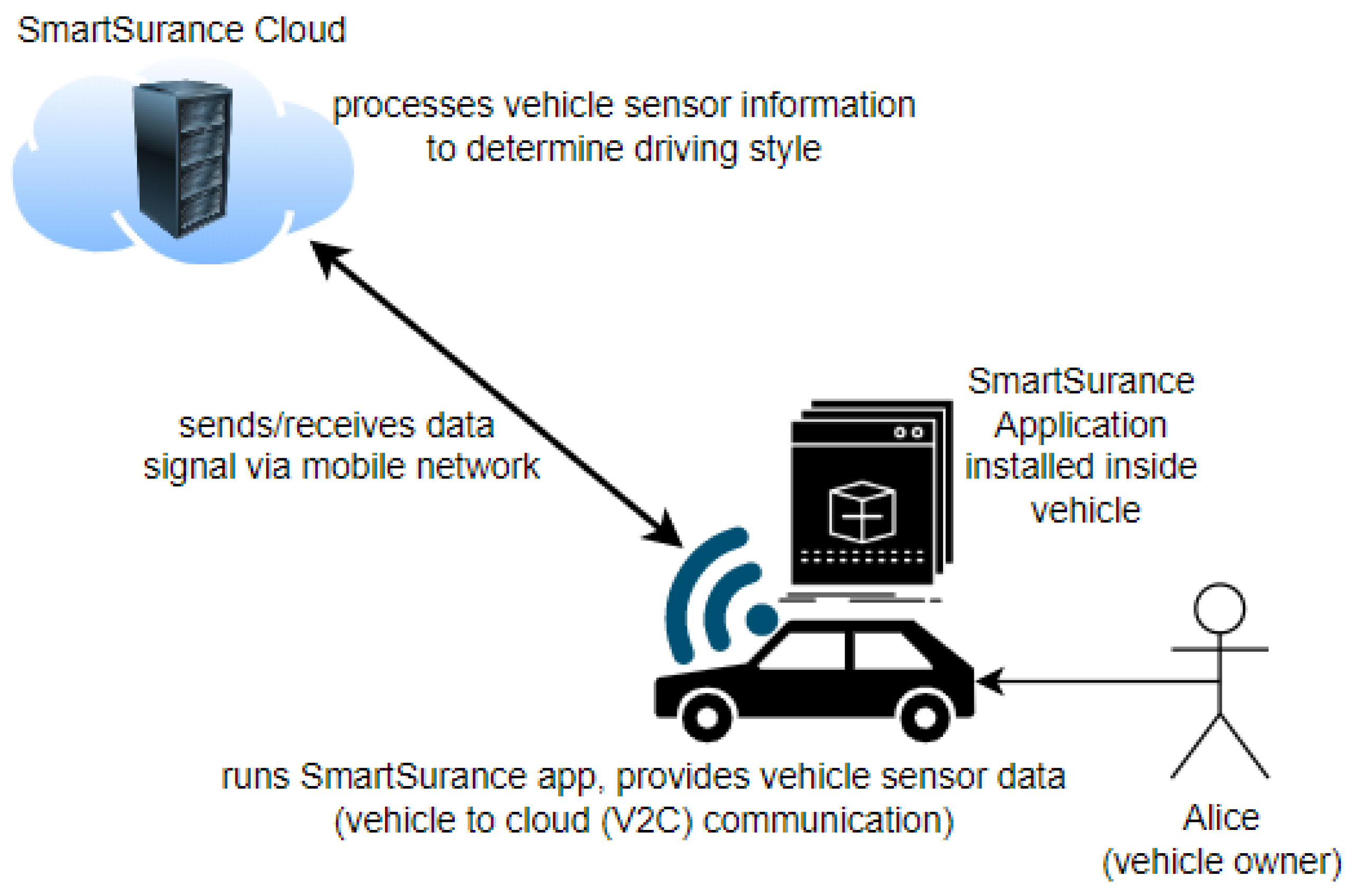
- Vehicle to Cloud (V2C): In V2C, vehicles communicate with different cloud-based services, usually via applications installed inside the vehicle, for example, to receive Over-The-Air (OTA) updates and share diagnostic reports with the vehicle manufacturers.
- Vehicle to Pedestrian (V2P): V2P primarily aims to enhance safety for pedestrians. Example applications are pedestrian detection and warning systems. This not only issues warnings to drivers, but also to pedestrians who are in the vicinity of the vehicle.
- Vehicle to Grid (V2G): V2G is concerned with data and energy exchange between electric vehicles and the smart grid. This is used, for example, to integrate electric vehicles into the power grid as an energy storage option, aiding grid stabilization as well as allowing the bridging of power outages in the context of the renewable energy transition.
2.3. Attribute Based Access Control Model
“[ABAC is] an access control method where subject [access] requests to perform [actions] on [resources] are granted or denied based on assigned attributes of the subject, assigned attributes of the [resource], environment conditions, and a set of policies that are specified in terms of those attributes and conditions.”([20], with adapted terminology)
- Policy Enforcement Point (PEP): Enforces access control decisions. Upon an access request, the PEP forwards this request to the Policy Decision Point (PDP). Depending on the PDP’s decision, access to the requested resource is either granted or denied.
- Policy Decision Point (PDP): Evaluates access control decisions. The PDP computes whether to allow or deny an access request based on the configured policies in the access control system and the attributes of subjects, resources, and environment.
- Policy Information Point (PIP): Resolves required attributes during policy evaluation.
- Policy Administration Point (PAP): Provides an interface for policy management.
3. Use Case
4. Requirements
4.1. Signal Access Control (SAC)
- Requirement Definition: This is a primitive access control requirement, wherein access to vehicle sensor data should be granted only to authorized entities. Arbitrary access requests must be restricted.
- Requirement Rationale: This requirement is fundamental from a safety and security standpoint. For instance, an application installed for analyzing driving behavior by collecting sensor data such as average speed, Rotations Per Minute (RPM) and maximum speed must not be able to trigger an emergency stop while the vehicle is in motion by writing corresponding values to the hard braking sensor as this would put the driver and other individuals on road at risk.
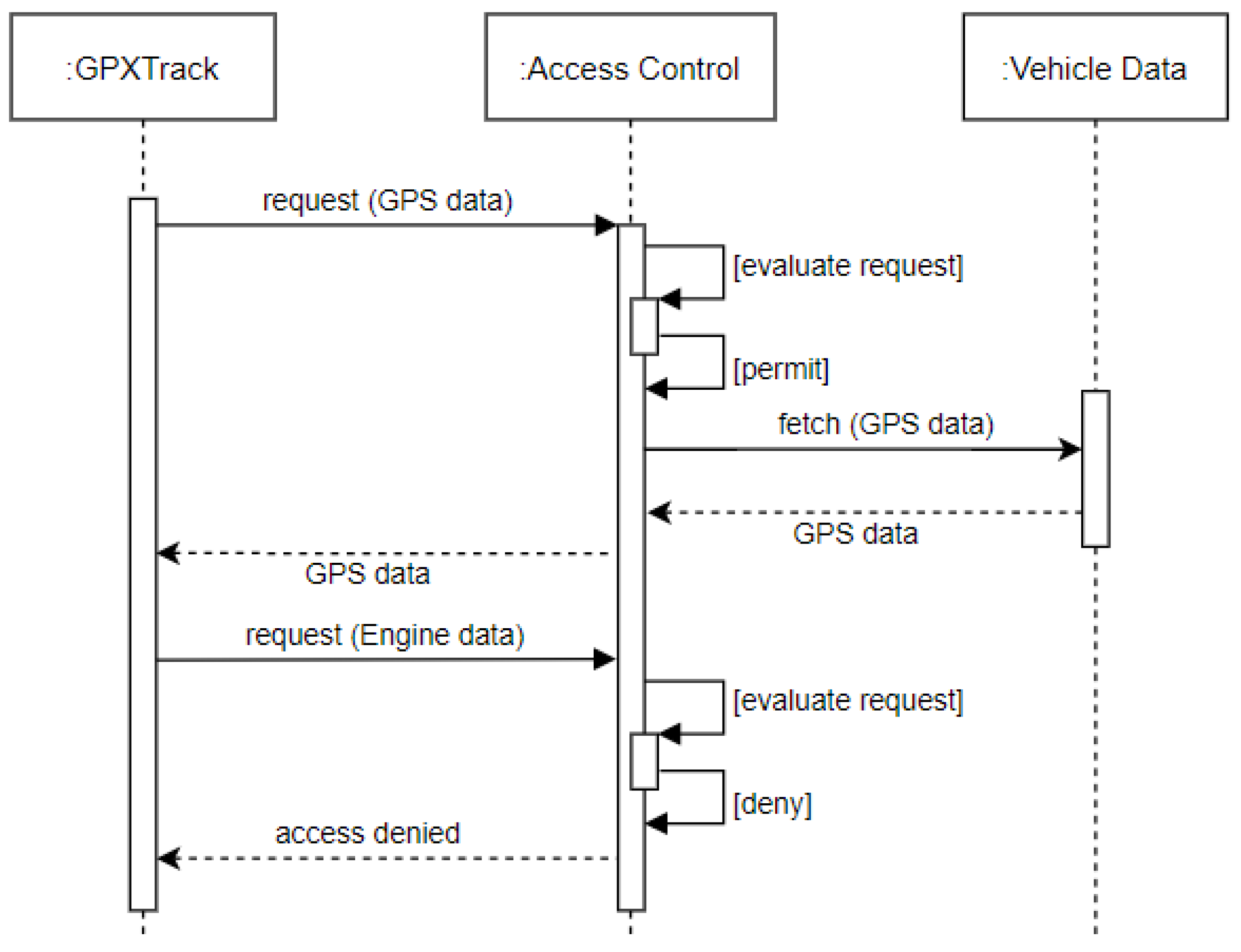
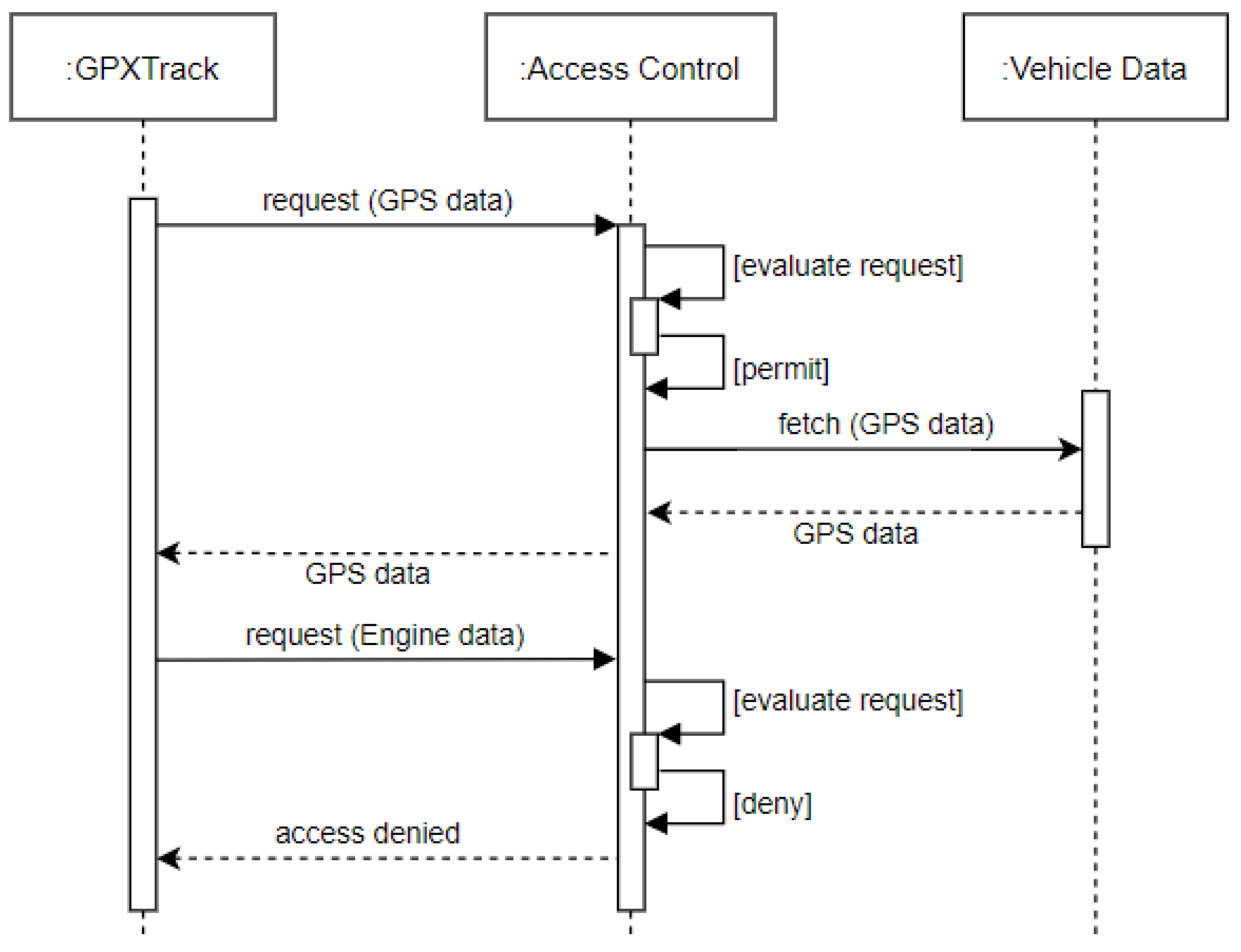
- Use Case: Consider Alice, who has installed a GPS location tracker application called GPXTrack in her vehicle. Alice uses this application to record geolocation data for roads that have not been mapped onto OpenStreetMap, a map application. GPXTrack requires access to the latitude and longitude sensor data (GPS) of the vehicle to which it has been authorized access. It must not be allowed to arbitrarily access other vehicular sensor data (see Figure 2).
4.2. Time-Based Access Control (TBAC)
- Requirement Definition: An access control mechanism should consider time periods for granular access control enforcement when evaluating an access request.
- Requirement Rationale: Vehicles in a connected vehicle ecosystem are a data source that helps mitigate challenges such as traffic management, threat alerts, and accident warnings, among others. A user willing to share their vehicle data and help alleviate such challenges might have some restrictions based on time. For example, they might not be willing to share their data (on weekends) for privacy or security reasons because they go hiking on weekends, and exposing the time duration of their trip could make their home vulnerable.
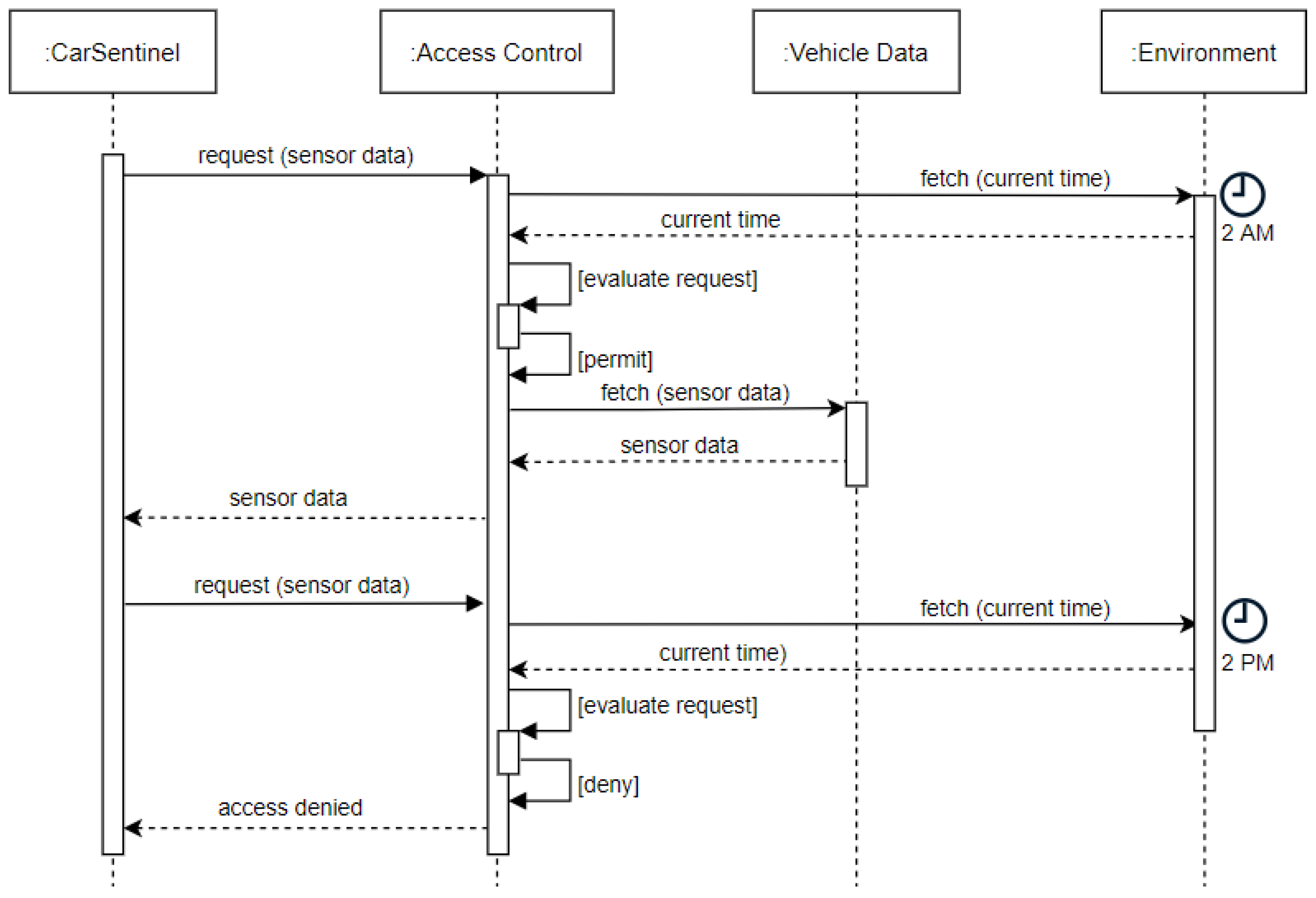
- Use Case: Consider Alice who installs an application called CarSentinel, an anti-theft app, in her vehicle. CarSentinel requires access to vehicle sensors—microphones, cameras, and microwave radar proximity sensors to determine the surroundings of the vehicle. Alice does not want CarSentinel to be active during the daytime as she uses it to get to work. Consequently, the app must be able to access the vehicle sensors only at night, which is assumed to be between 8 PM and 8 AM (see Figure 3). To evaluate the access request received by CarSentinel, the current time needs to be inferred by the access control mechanism from the environment. If vehicle sensor data are accessed within the aforementioned time interval (8 PM to 8 AM), then access is granted, otherwise, it is denied. Note that there might be additional constraints set by Alice based on the day(s) of the week, for example, weekends when her vehicle is parked in the garage and she does not want her vehicle data to be accessed.
4.3. Location-Based Access Control (LBAC)
- Requirement Definition: An access control mechanism should consider the location of the vehicle when evaluating an access request. This is relevant, especially in a connected vehicle ecosystem where location technologies have become more precise. Similar to time, location-based access should be enforced for allowing the user to share their vehicle data in a flexible setting based on their convenience.
- Requirement Rationale: The reasoning behind this requirement is very similar to time-based access. A user might be willing to share location but under certain conditions might not because of security or privacy concerns.
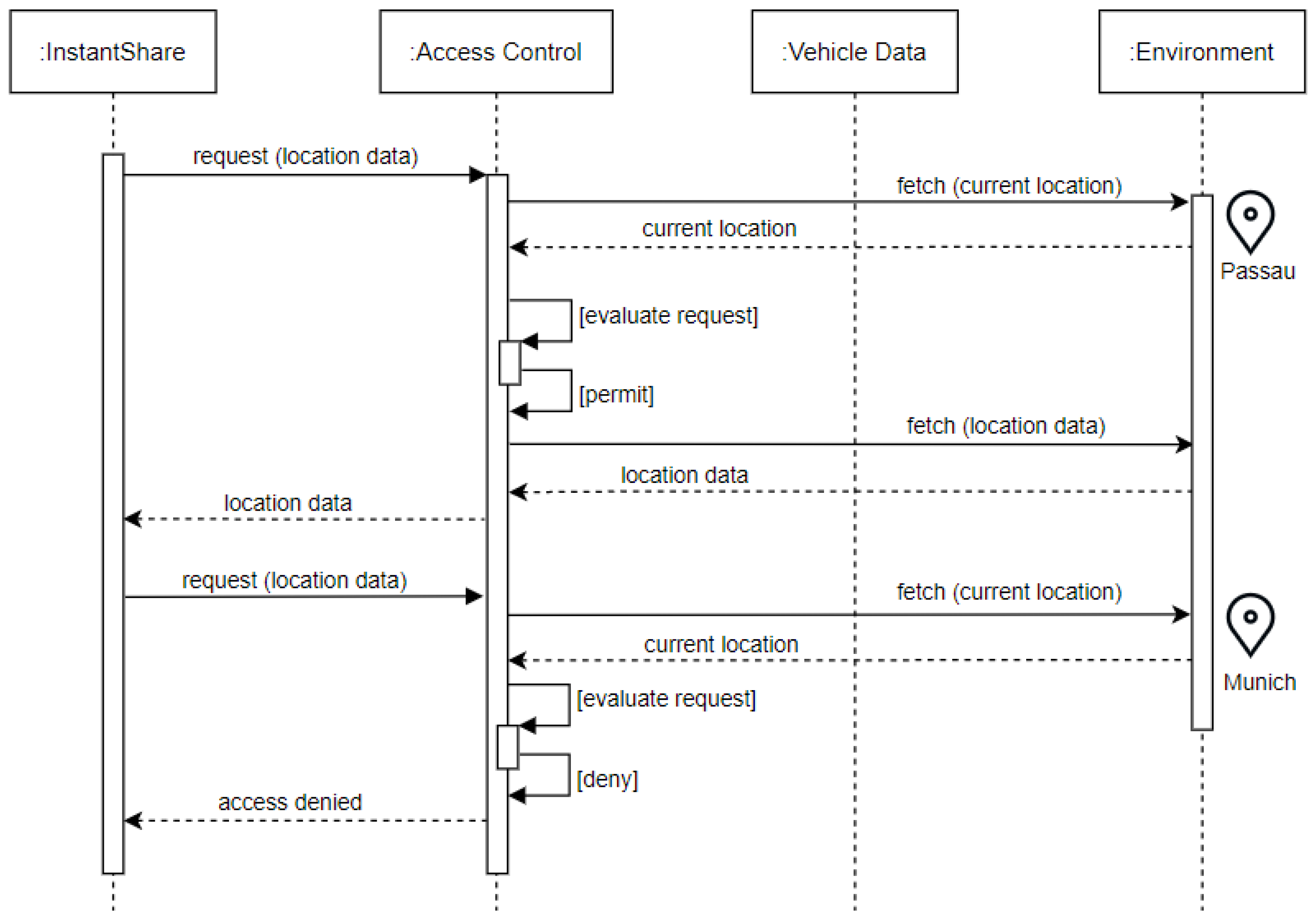
- Use Case: Consider Bob who is interested in sharing his vehicle when it is not in use. Bob installs an application InstantShare that requires access to the location of his car (latitude and longitude) regularly which is then sent to its servers in the cloud for processing and evaluating currently available vehicles for sharing. Since Bob lives in a well-connected city called Passau (Germany), he decides to use local transport when in Passau. This allows him to share his vehicle with people who want to use his vehicle within Passau city limits for some additional money. Sometimes, he travels out of town for work or personal reasons with his vehicle and does not want to share his vehicle, otherwise, he would be stranded. As such, InstantShare must only be able to access his car’s location data as long as it is located within the city limits of Passau (see Figure 4).
4.4. Frequency-Based Access Control (FBAC)
- Requirement Definition: An access control mechanism should consider the frequency of requests that can be made by an authorized entity. A vehicle is a safety-critical system and processing multiple requests from a single application may overtax the ECUs which could then restrict their ability to perform critical tasks.
- Requirement Rationale: Restricting the frequency of access to vehicle sensor data by an application prevents overloading communication channels (e.g., Controller Area Network (CAN) bus) with incoming signals. If not limited, this could raise a safety issue, particularly when critical components such as the engine, brakes, or steering are affected. Additionally, there are instances where users may wish to restrict the frequency of data access for privacy reasons. For example, it may be undesirable for vehicle owners to share their location data within close-spaced intervals as this would provide thorough information about their motion profile.
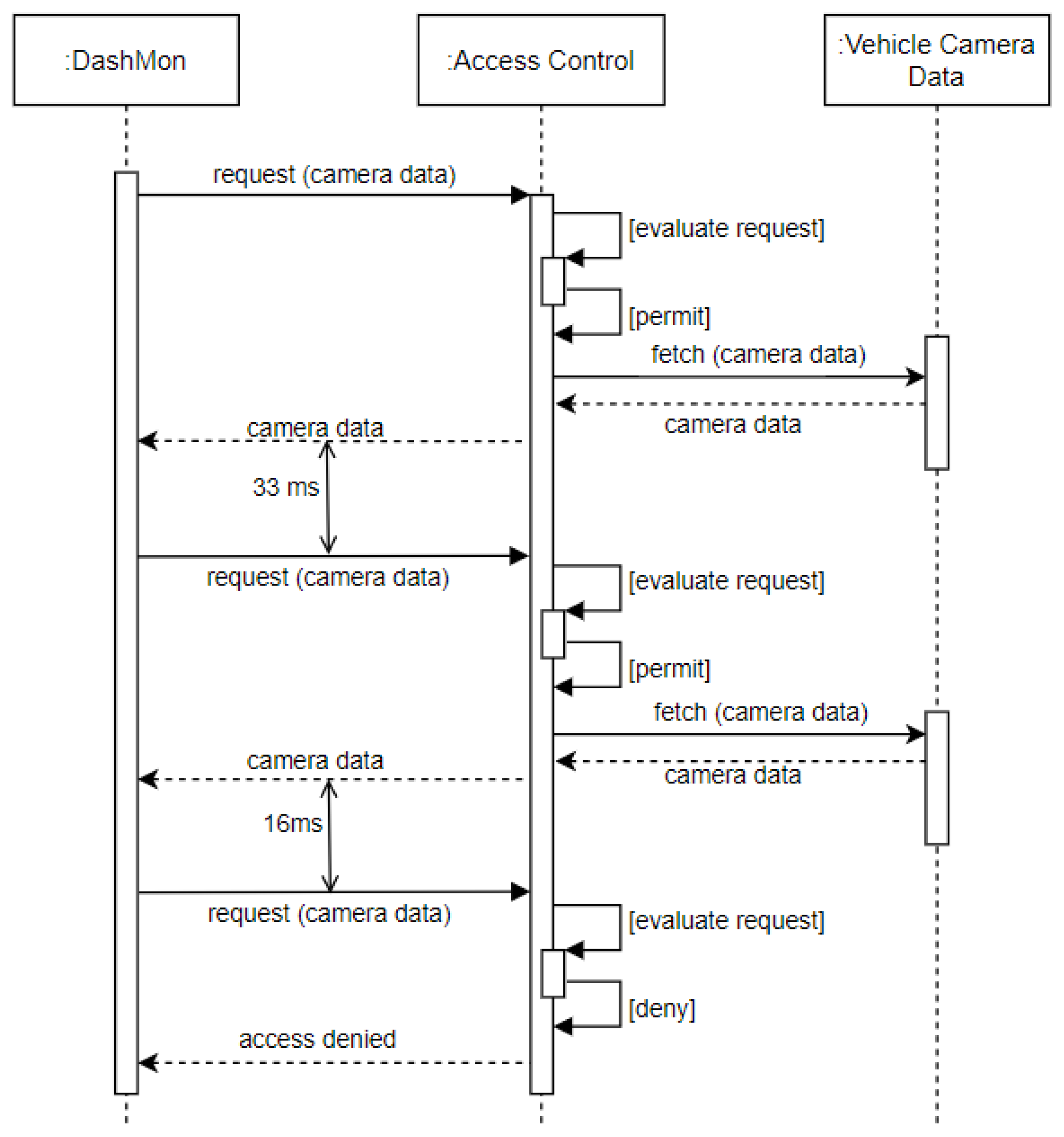
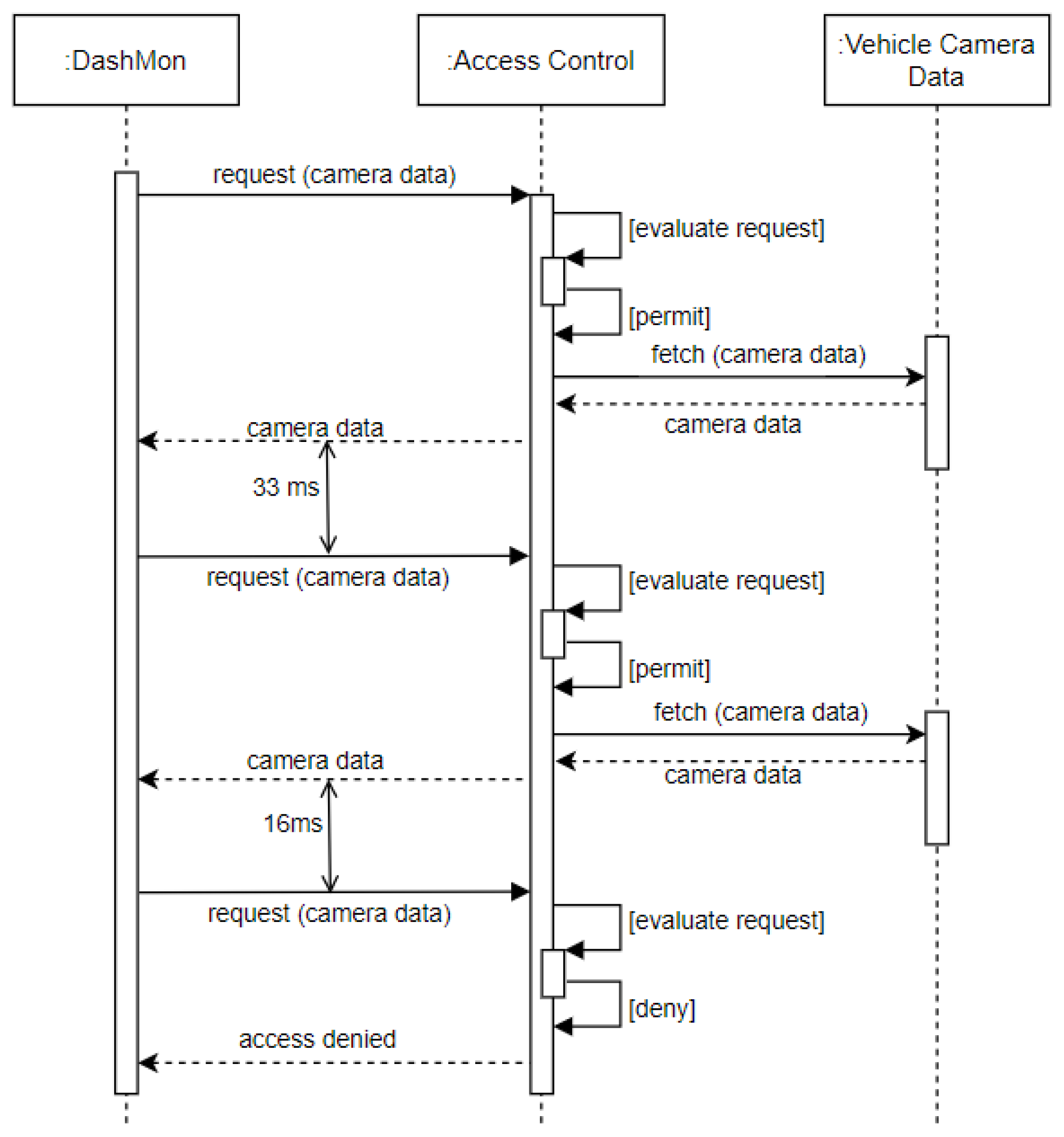
- Use Case: Consider Alice, who opted to install an application called DashMon in her vehicle, which is an application that periodically accesses her vehicle’s front and rear cameras to take photos for dash cam functionality. To not overtax the underlying communication channels, DashMon is only allowed to take 30 photos per second, i.e., photos may be taken at a 33ms time interval (see Figure 5).
5. Related Work
5.1. Signal Access Control (SAC)
5.2. Frequency-Based Access Control (FBAC)
5.3. Time-Based Access Control (TBAC)
5.4. Location-Based Access Control (LBAC)
5.5. Discussion
6. XACML for Mobility (XACML4M)
6.1. XACML4M
- Add data types and functions to the XACML policy—We add dayOfWeek data type and dateTime-in-dayOfWeek-range function to account for TBAC; Geometry data type to define a polygon and urn:ogc:def:function:geoxacml:1.0:geometry-contains function to determine whether a point is contained inside the area that is enclosed by the polygon; a custom data type urn:tf:cyber:xacml:polling-frequency:time-since-last-access:ms to retrieve time since last access made by a requesting entity.
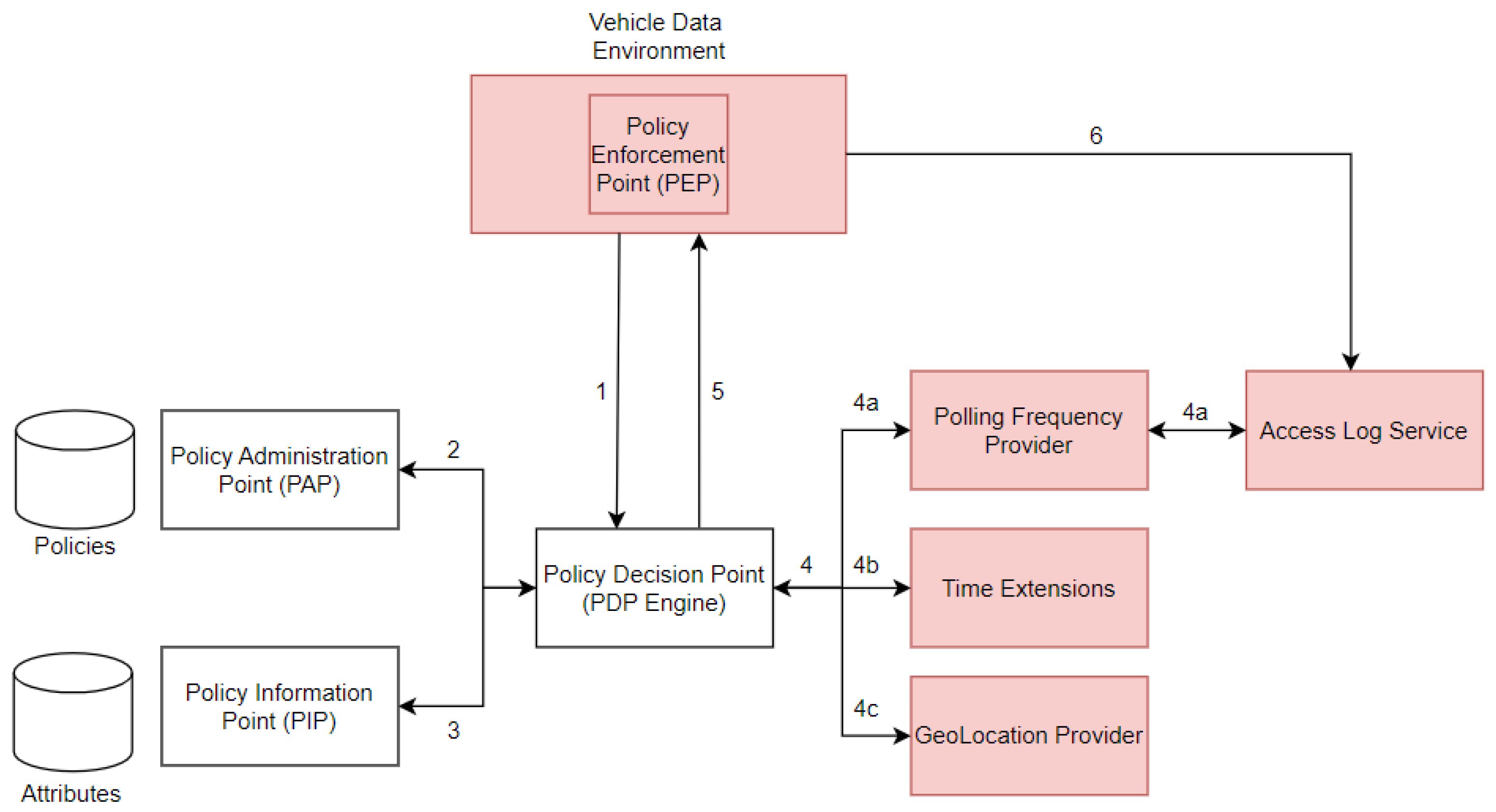
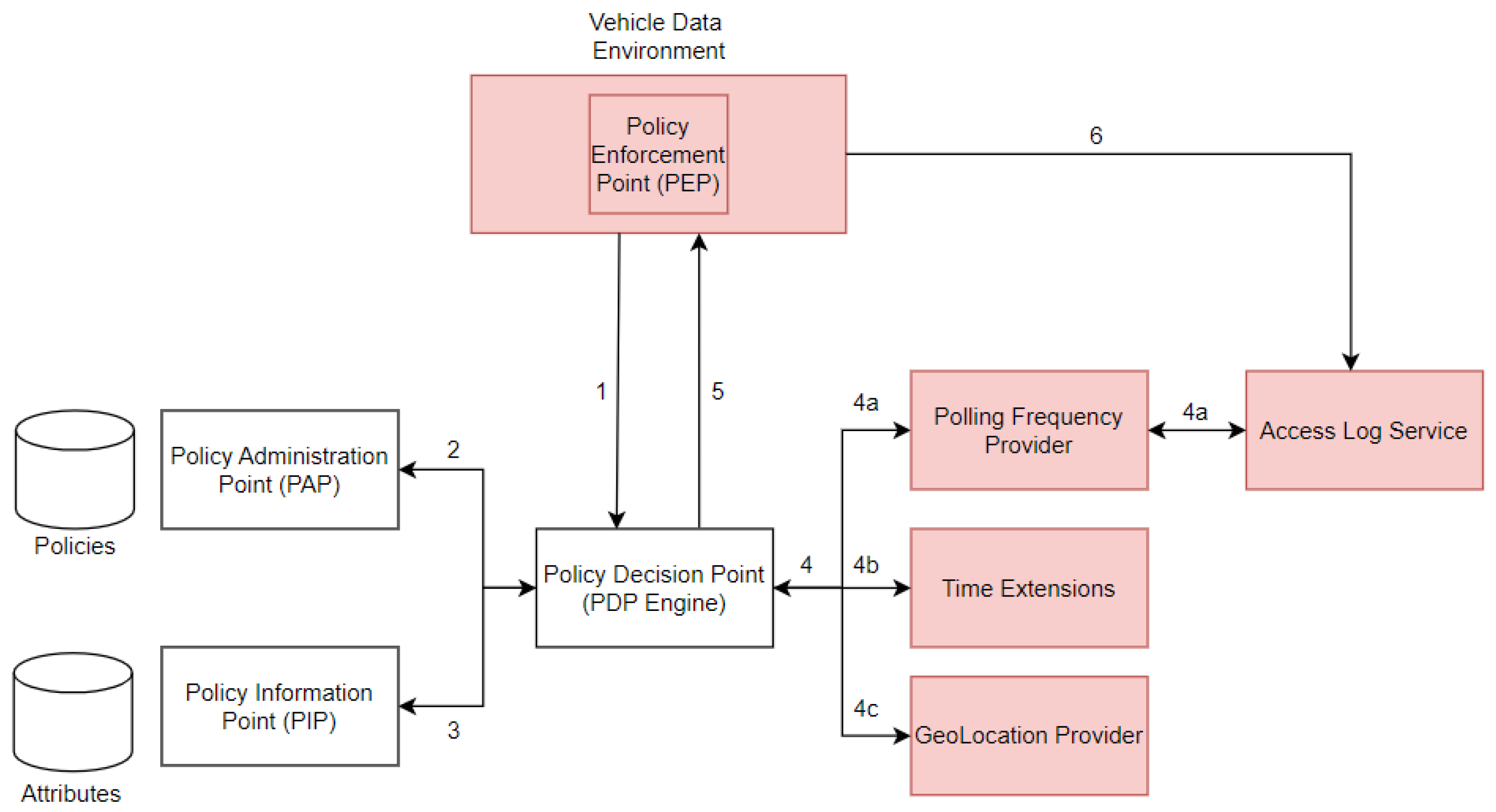
- Add components to the data flow model:
- –
- Vehicle Data Environment (VDE) integrated with Policy Enforcement Point (PEP): VDE is a setup through which vehicle sensor data are accessed and PEP receives all incoming access requests from any application/service.
- –
- Time Extensions: Provides time period data type as an attribute for policy evaluation by PDP.
- –
- GeoLocation Provider: Provides geospatial data type as an attribute and also fetches the current location of the vehicle for policy evaluation by PDP.
- –
- Polling Frequency Provider: fetches the timestamp of the last access made by a requesting entity (an application/service).
- –
- Access Log Service: records the last successful access made by a requesting entity (an application/service).
6.1.1. Vehicle Data Environment (VDE) with PEP
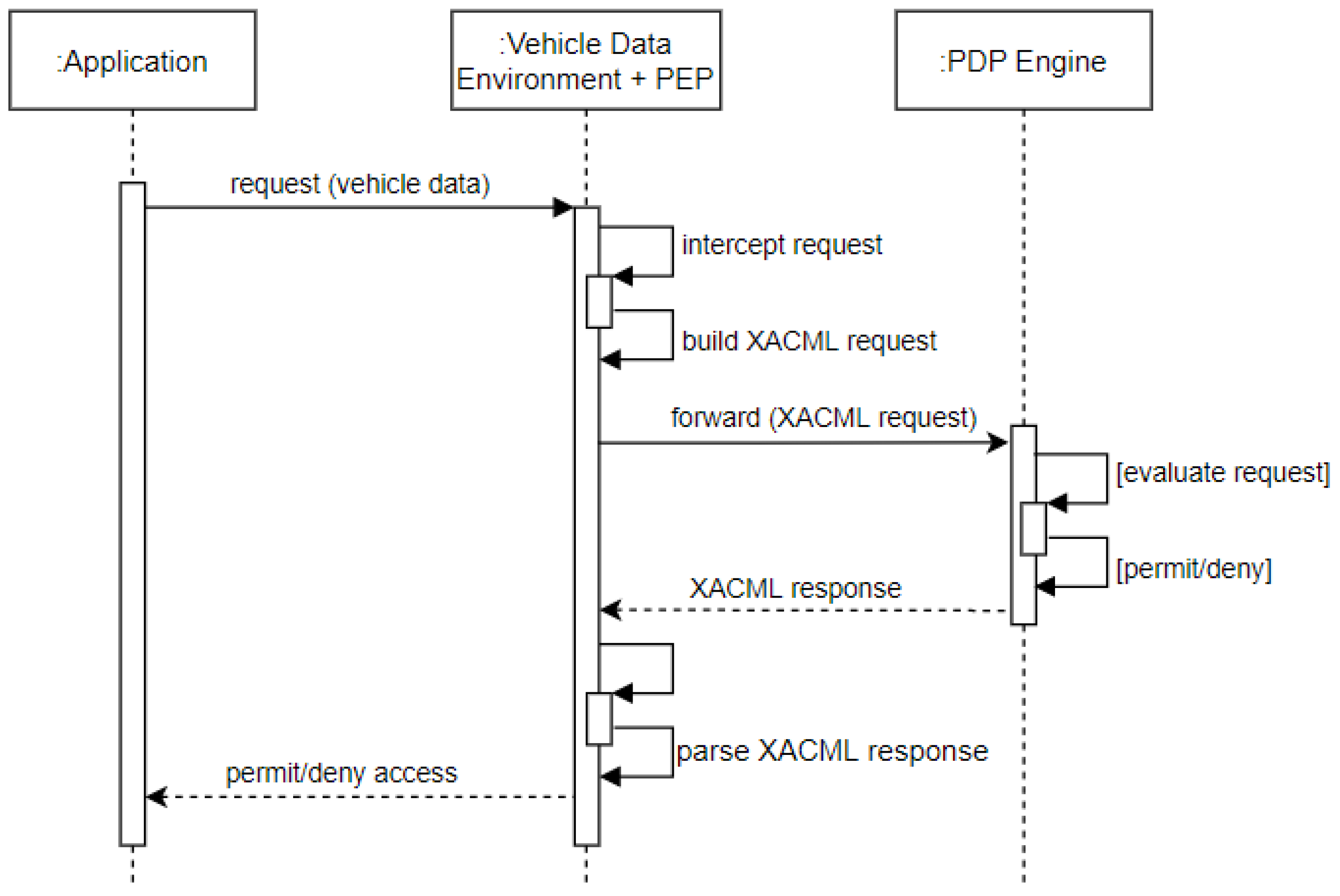
- Request Assembly: If sensor data are guarded by XACML access control, then the PEP intercepts the request and first builds an access request that adheres to the JSON profile of XACML [39]. An access request typically contains the following attributes:
- Subject ID (String): The identifier of the requesting subject.
- Action ID (String): The identifier of the requested action.
- Resource ID (String): The identifier of the requested resource.
Note that in our framework, the PEP can also include additional attributes such as current location (in case of LBAC requirement) or current time (in case of TBAC requirement) to the XACML request before submitting it to the PDP and thus aiding in its policy evaluation. - Request Submission to PDP: The resulting XACML request is submitted to the PDP component for access evaluation. Depending on the underlying setup, this component may be placed externally to the vehicle and can be configured accordingly. The PDP evaluates the incoming request against all policies currently in effect and responds with its decision.
- Response Evaluation: After policy evaluation, the PDP’s response is received by the PEP. If its access decision is Permit, the sensor data access is granted. Otherwise, access is denied. Note that the PEP component heavily relies on aspect-oriented programming (AOP) which facilitates enabling/disabling access control for an entire set or subset of vehicle signal data.
- Obligation Fulfillment (optional): XACML provides the concept of obligations. In the case of our XACML4M framework, the Obligations Service is directly embedded into the PEP. Should an XACML response from PDP include obligations, they are executed before the sensor data are accessed. The business logic of all obligations is implemented as part of the PEP. A concrete example will be given in Section 6.1.5.
6.1.2. XACML4M Signal Access Control (SAC)
<?xml version="1.0" encoding="UTF-8" standalone="yes"?>
<Policy
<!--Policy definition-->
xmlns="urn:oasis:names:tc:xacml:3.0:core:schema:wd-17"
Version="1.0" PolicyId="GPXTrackPolicy"
RuleCombiningAlgId="urn:oasis:names:tc:xacml:3.0:rule-combining-algorithm:deny-unless-permit">
<Target>
<AnyOf>
<AllOf>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<!--Subject data type and value-->
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">gpxtrack</AttributeValue>
<AttributeDesignator
Category="urn:oasis:names:tc:xacml:1.0:subject-category:access-subject"
AttributeId="urn:oasis:names:tc:xacml:1.0:subject:subject-id" MustBePresent="true"
DataType="http://www.w3.org/2001/XMLSchema#string"/>
</Match>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<!--Resource data type and value-->
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">/vehicle/location</AttributeValue>
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#string"
AttributeId="urn:oasis:names:tc:xacml:1.0:resource:resource-id"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:resource"
MustBePresent="true"/>
</Match>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<!--Action data type and value-->
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">GET</AttributeValue>
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#string"
AttributeId="urn:oasis:names:tc:xacml:1.0:action:action-id"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:action" MustBePresent="true" />
</Match>
</AllOf>
</AnyOf>
</Target>
<Rule Effect="Permit" RuleId="AllowGPS"></Rule>
</Policy>
6.1.3. XACML4M Time-Based Access Control (TBAC)
<Condition> <!--Function "time-in-range" - to check time range--> <Apply FunctionId="urn:oasis:names:tc:xacml:2.0:function:time-in-range"> <Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:time-one-and-only"> <AttributeDesignator DataType="http://www.w3.org/2001/XMLSchema#time" <!Parameter 1 is the current time passed to Function "dateTime-in-dayOfWeek-range"--> AttributeId="urn:oasis:names:tc:xacml:1.0:environment:current-time" Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment" MustBePresent="true"/> </Apply> <AttributeValue <!Parameter 2 is the start time passed to Function "time-in-range"--> DataType="http://www.w3.org/2001/XMLSchema#time">20:00:00+02:00</AttributeValue> <AttributeValue <!Parameter 3 is the end time passed to Function "time-in-range"--> DataType="http://www.w3.org/2001/XMLSchema#time">08:00:00+02:00</AttributeValue> </Apply> </Condition>
<Condition>
<!--Function "dateTime-in-dayOfWeek-range" - to check time range and day of Week-->
<Apply FunctionId="urn:oasis:names:tc:xacml:3.0:function:dateTime-in-dayOfWeek-range">
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:dateTime-one-and-only">
<AttributeDesignator
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
<!Parameter 1 is the current time passed to Function "dateTime-in-dayOfWeek-range"-->
AttributeId="urn:oasis:names:tc:xacml:1.0:environment:current-dateTime"
DataType="http://www.w3.org/2001/XMLSchema#dateTime"
MustBePresent="false"/>
</Apply>
<!Parameter 2 is start time/day range to Function "dateTime-in-dayOfWeek-range"-->
<!1 - Monday, 2 - Tuesday, 3 - Wednesday ...."-->
<AttributeValue DataType="urn:oasis:names:tc:xacml:3.0:data-type:dayOfWeek">1+02:00</AttributeValue>
<!Parameter 3 is end time/day range to Function "dateTime-in-dayOfWeek-range"-->
<AttributeValue DataType="urn:oasis:names:tc:xacml:3.0:data-type:dayOfWeek">5+02:00</AttributeValue>
</Apply>
</Condition>
6.1.4. XACML4M Location-Based Access Control (LBAC)
- A data type and function are needed to express geospatial properties (boundaries) and functionality within policies;
- Means for obtaining the vehicle’s current location within the access control system must be established.
<AttributeValue DataType="urn:ogc:def:dataType:geoxacml:1.0:geometry" geoxacml:crs="EPSG:4326"> POINT (48.575 13.447) </AttributeValue>
<?xml version="1.0" encoding="UTF-8" standalone="no"?>
<Policy
Version="1.0"
PolicyId="LocationTest"
xmlns="urn:oasis:names:tc:xacml:3.0:core:schema:wd-17"
xmlns:geoxacml="http://www.opengis.net/geoxacml"
RuleCombiningAlgId="urn:oasis:names:tc:xacml:3.0:rule-combining-algorithm:deny-unless-permit">
<Target>
<AnyOf>
<AllOf>
<Match
MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">instantshare</AttributeValue>
<AttributeDesignator
Category="urn:oasis:names:tc:xacml:1.0:subject-category:access-subject"
AttributeId="urn:oasis:names:tc:xacml:1.0:subject:subject-id"
MustBePresent="true"
DataType="http://www.w3.org/2001/XMLSchema#string"/>
</Match>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<AttributeValue
<!--Resource to be accessed-->
DataType="http://www.w3.org/2001/XMLSchema#string">/vehicle/location</AttributeValue>
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#string"
AttributeId="urn:oasis:names:tc:xacml:1.0:resource:resource-id"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:resource"
MustBePresent="true"
/>
</Match>
<Match
MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<!--Action to be performed-->
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">GET</AttributeValue>
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#string"
AttributeId="urn:oasis:names:tc:xacml:1.0:action:action-id"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:action"
MustBePresent="true"
/>
</Match>
</AllOf>
</AnyOf>
</Target>
<Rule
Effect="Permit"
RuleId="PermitPassau">
<Condition>
<Apply
FunctionId="urn:ogc:def:function:geoxacml:1.0:geometry-contains">
<AttributeValue
DataType="urn:ogc:def:dataType:geoxacml:1.0:geometry"
<!--City Passau boundaries defined using a Polygon-->
geoxacml:crs="EPSG:4326">POLYGON ((
48.574 13.479,
48.577 13.462,
48.574 13.438,
48.575 13.431,
48.574 13.421,
48.577 13.412,
48.560 13.400,
48.552 13.435,
48.558 13.438,
48.572 13.463,
48.574 13.479
))
</AttributeValue>
<Apply
<!--Function to obtain the current location of the vehicle---checks if the point is within or outside the Polygon-->
FunctionId="urn:ogc:def:function:geoxacml:1.0:geometry-one-and-only">
<AttributeDesignator
DataType="urn:ogc:def:dataType:geoxacml:1.0:geometry"
AttributeId="urn:tf:cyber:xacml:location:gpslocation"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
MustBePresent="true"
/>
</Apply>
</Apply>
</Condition>
</Rule>
</Policy>
6.1.5. XACML4M Frequency-Based Access (FBAC)
- An access log mechanism to keep track of the frequency of access requests made by a subject;
- A custom attribute provider for determining the last time a subject had accessed a resource.
- /save
- /query
{
"subject": "dashmon",
"action": "GET",
"resource": "/vehicle/camera"
}
{
"subject": "dashmon",
"action": "GET",
"resource": "/vehicle/camera",
"time": 1649964600000
}
<ObligationExpressions>
<!--Obligation requires 3 attributes for logging-->
<ObligationExpression ObligationId="LogObligation" FulfillOn="Permit">
<!--Attribute 1: Subject requesting access-->
<AttributeAssignmentExpression AttributeId="LogObligation:Subject">
<AttributeDesignator
MustBePresent="true"
Category="urn:oasis:names:tc:xacml:1.0:subject-category:access-subject"
AttributeId="urn:oasis:names:tc:xacml:1.0:subject:subject-id"
DataType="http://www.w3.org/2001/XMLSchema#string" />
</AttributeAssignmentExpression>
<!--Attribute 2: Action performed by the Subject-->
<AttributeAssignmentExpression AttributeId="LogObligation:Action">
<AttributeDesignator
MustBePresent="true"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:action"
AttributeId="urn:oasis:names:tc:xacml:1.0:action:action-id"
DataType="http://www.w3.org/2001/XMLSchema#string" />
</AttributeAssignmentExpression>
<!--Attribute 3: Resource accessed by the Subject-->
<AttributeAssignmentExpression AttributeId="LogObligation:Resource">
<AttributeDesignator
MustBePresent="true"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:resource"
AttributeId="urn:oasis:names:tc:xacml:1.0:resource:resource-id"
DataType="http://www.w3.org/2001/XMLSchema#string" />
</AttributeAssignmentExpression>
</ObligationExpression>
</ObligationExpressions>
- polling-frequency:time-since-last-access:ms: Returns the time difference since the resource has been accessed by the subject via some action in milliseconds.
- polling-frequency:time-since-last-access:s: Returns the time difference since the resource has been accessed by the subject via some action, giving lower time resolution in seconds.
- polling-frequency:hz: Provides the access frequency if the resource were accessed at the current point in time, depending on the previous access time (i.e., the inverse of the last access time delta to the current time).
<Rule Effect="Permit" RuleId="PollingFrequencySample">
<Condition>
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:integer-greater-than">
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:integer-one-and-only">
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#integer"
<!--Fetches time difference between last and current access in ms-->
AttributeId="urn:tf:cyber:xacml:polling-frequency:time-since-last-access:ms"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
MustBePresent="true" />
</Apply>
<AttributeValue
<!--Defining the frequency of access-->
DataType="http://www.w3.org/2001/XMLSchema#integer">33</AttributeValue>
</Apply>
</Condition>
</Rule>
7. Evaluation
7.1. Experimental Setup
7.2. Functional Evaluation
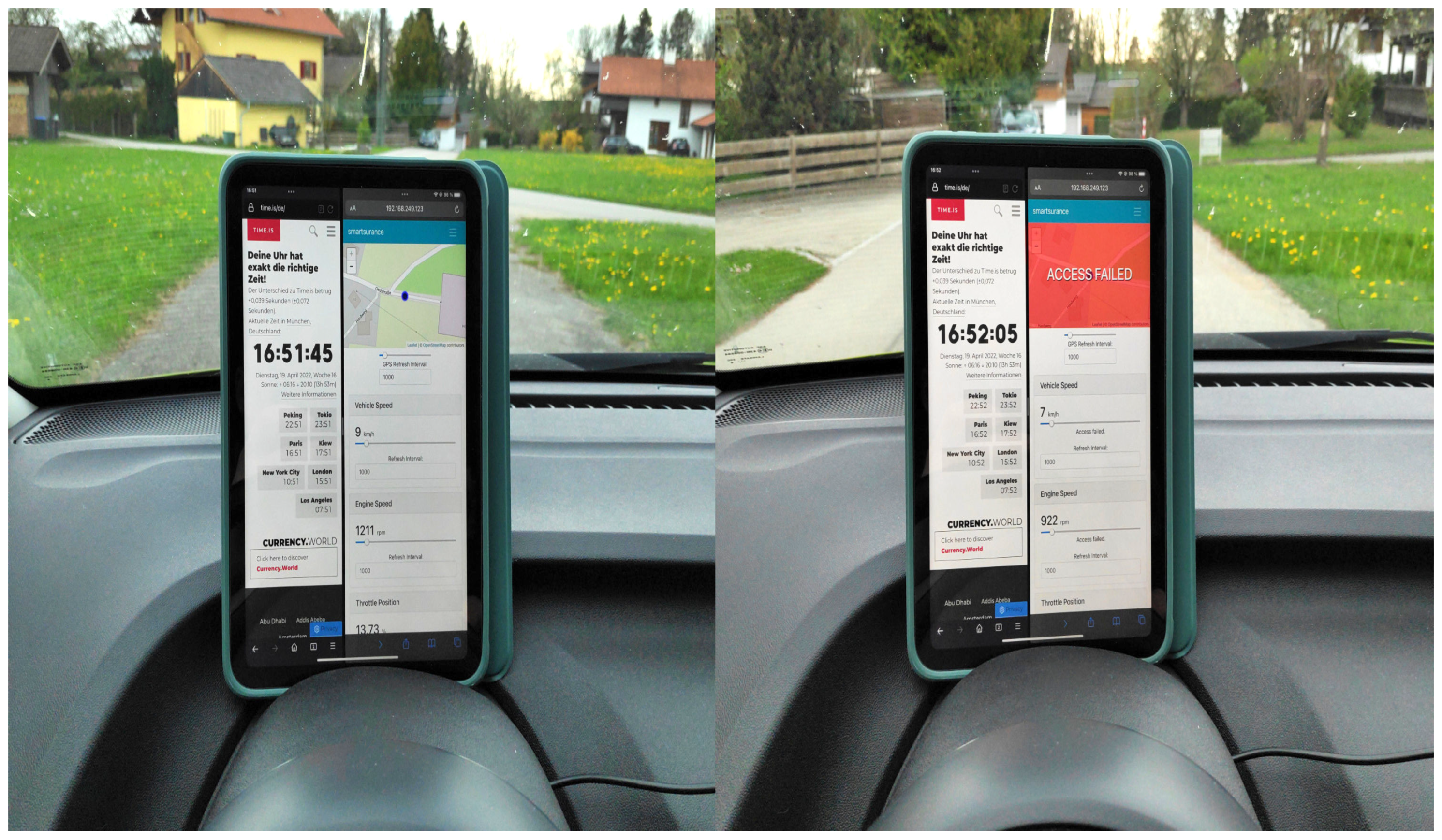
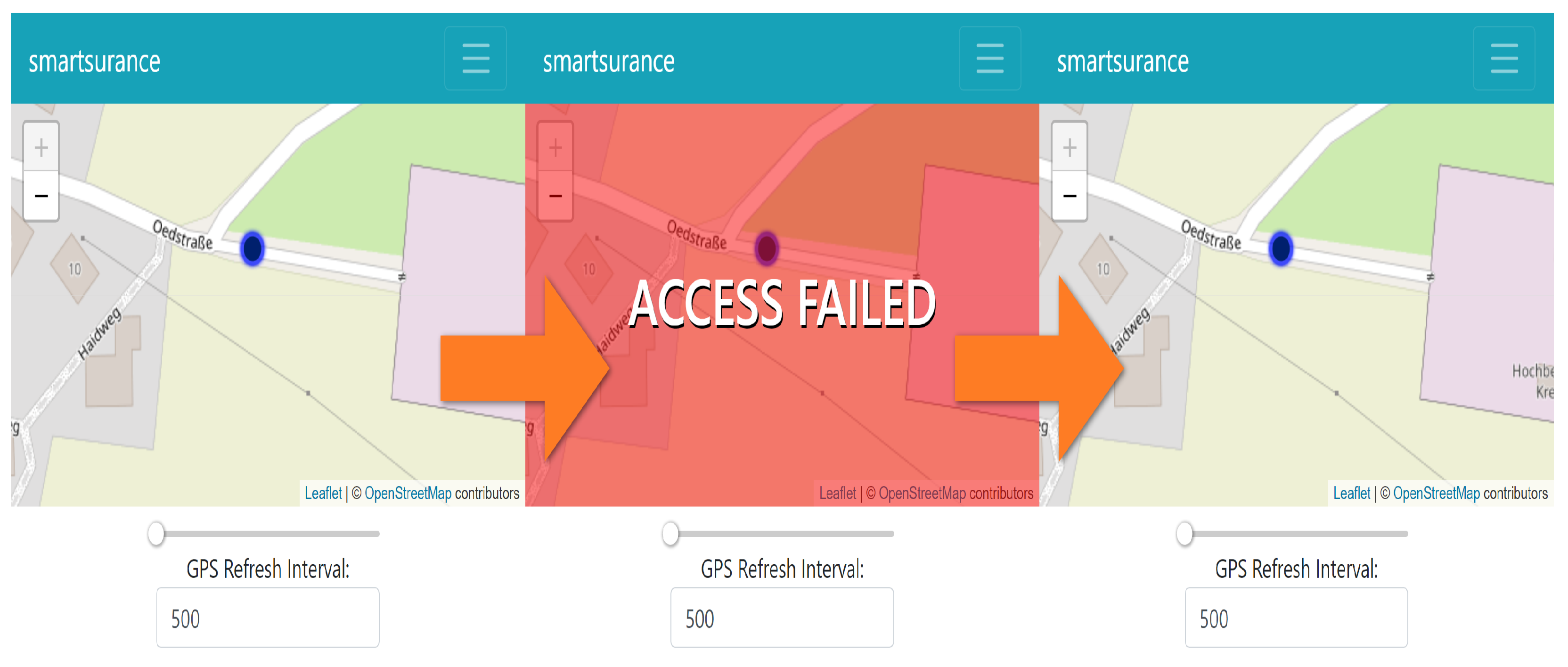
- Signal Access: Only current location, vehicle speed, engine RPM, and throttle position sensor data can be shared to SmartSurance.
- Location-Based Access: Vehicle data access is granted only when she travels outside her town of Haiden, Bavaria, Germany.
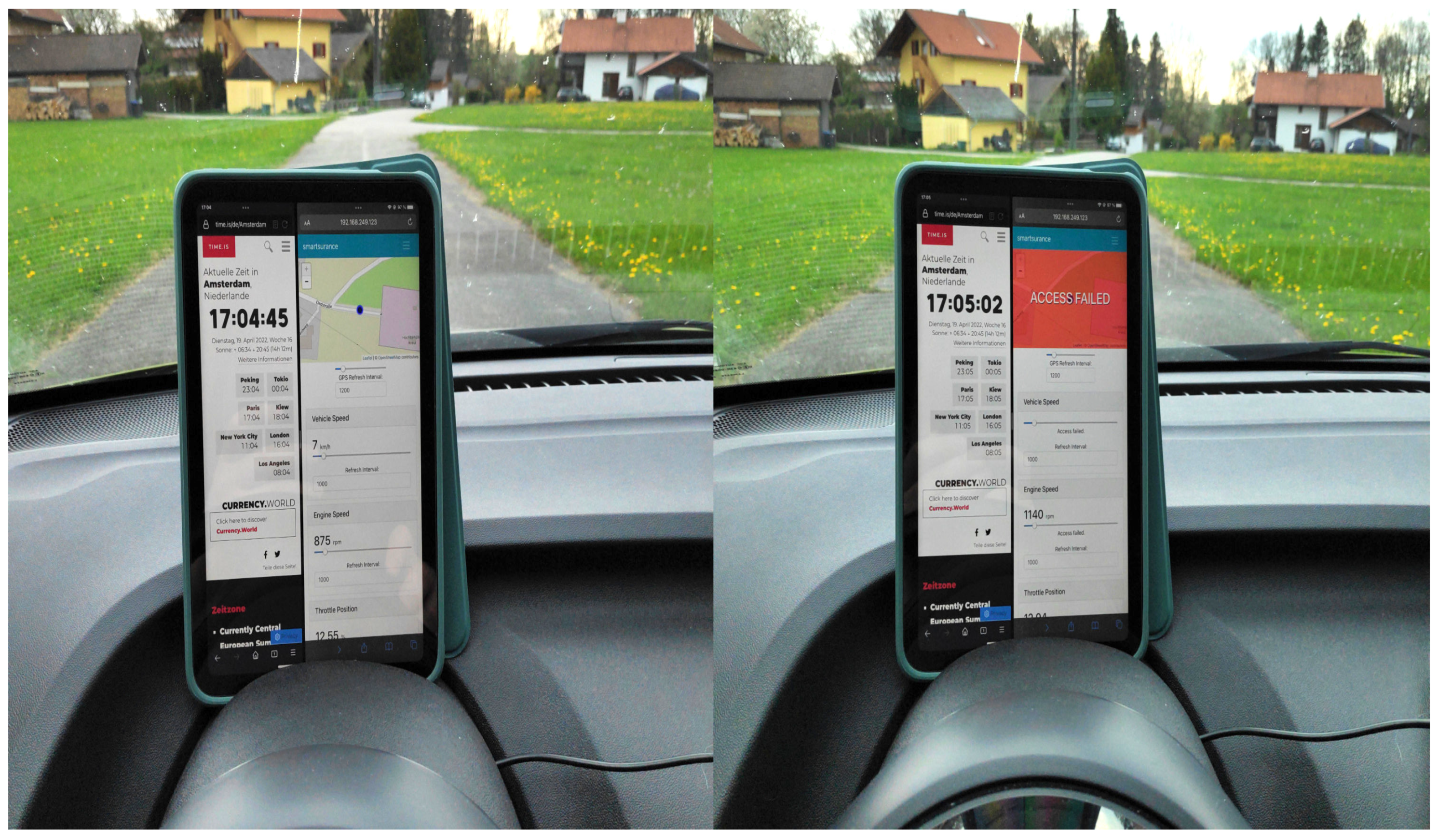
- Time-Based Access: Vehicle data access is denied for weekdays between 5:05 p.m. and 8:00 p.m.
- Frequency-Based Access: SmartSurance requires one sample of the sensor values per second.
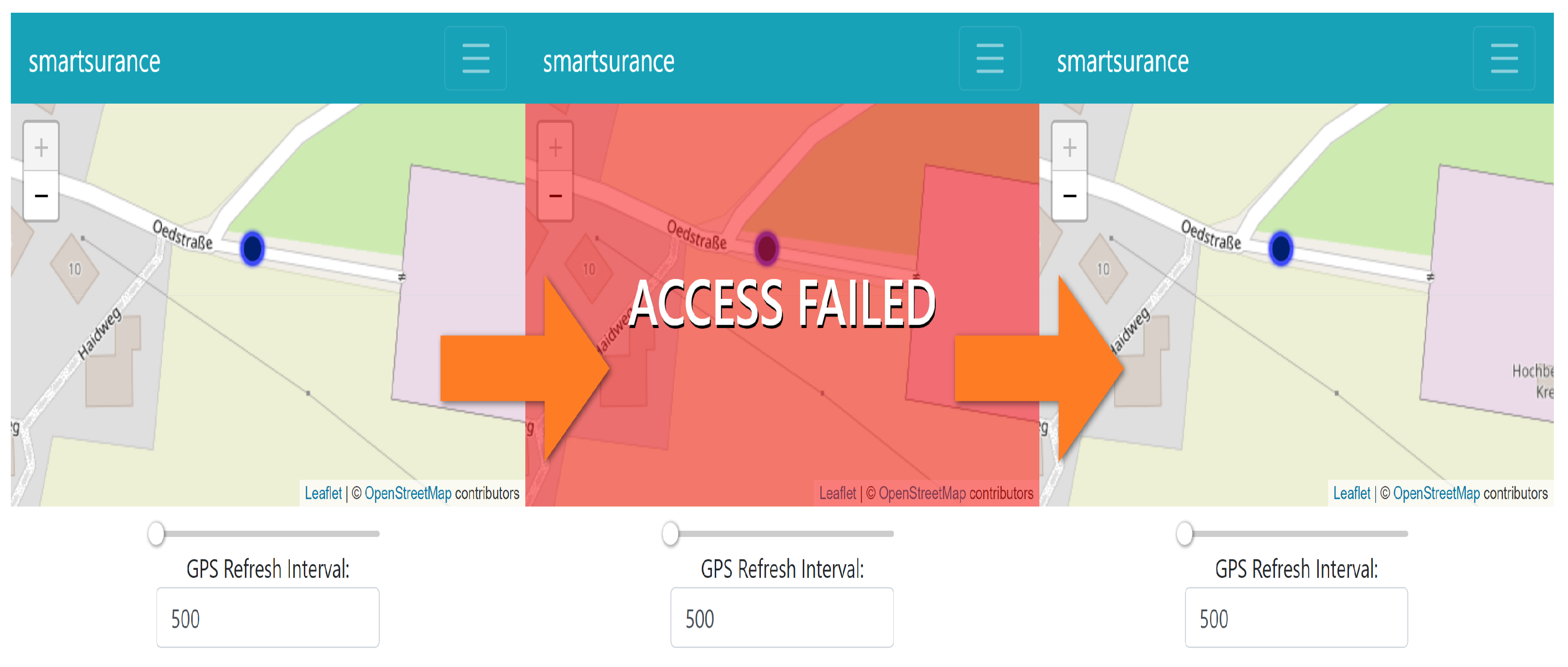
7.2.1. Location-Based Access Control
<Policy PolicyId="SmartSuranceWrongLocation"
<Target></Target>
<Rule RuleId="DenyWrongPosition" Effect="Deny">
<Description>Denies all incoming requests by SmartSurance when vehicle is inside hometown.</Description>
<Condition>
!--Function to check if the current vehicle location is inside the defined polygon of the city of Haiden -->
<Apply FunctionId="urn:ogc:def:function:geoxacml:1.0:geometry-contains">
</AttributeValue>
<Apply FunctionId="urn:ogc:def:function:geoxacml:1.0:geometry-one-and-only">
<AttributeDesignator
DataType="urn:ogc:def:dataType:geoxacml:1.0:geometry"
!--Access to Location Data-->
AttributeId="urn:tf:cyber:xacml:location:gpslocation"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
MustBePresent="true"
/>
</Apply>
</Apply>
</Condition>
</Rule>
</Policy>
7.2.2. Time-Based Access Control
<Policy PolicyId="SmartSuranceOffPeakHours"
<Target></Target>
<Rule RuleId="DenyOffHours" Effect="Deny">
<Description>Denies all incoming requests by SmartSurance during off-peak hours.</Description>
<Condition>
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:and">
<Apply FunctionId="urn:oasis:names:tc:xacml:3.0:function:dateTime-in-dayOfWeek-range">
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:dateTime-one-and-only">
<AttributeDesignator
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
AttributeId="urn:oasis:names:tc:xacml:1.0:environment:current-dateTime"
DataType="http://www.w3.org/2001/XMLSchema#dateTime"
MustBePresent="false"/>
</Apply>
<!--Monday (1), Tuesday (2)... Friday(5)---below, we define the day range from Monday to Friday when access is denied-->
<AttributeValue DataType="urn:oasis:names:tc:xacml:3.0:data-type:dayOfWeek">1+02:00</AttributeValue>
<AttributeValue DataType="urn:oasis:names:tc:xacml:3.0:data-type:dayOfWeek">5+02:00</AttributeValue>
</Apply>
<Apply FunctionId="urn:oasis:names:tc:xacml:2.0:function:time-in-range">
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:time-one-and-only">
<AttributeDesignator
DataType="http://www.w3.org/2001/XMLSchema#time"
AttributeId="urn:oasis:names:tc:xacml:1.0:environment:current-time"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
MustBePresent="true"/>
</Apply>
<!--Time Limit when access is denied-->
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#time">17:05:00+02:00</AttributeValue>
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#time">20:00:00+02:00</AttributeValue>
</Apply>
</Apply>
</Condition>
</Rule>
</Policy>
7.2.3. Frequency-Based Access Control
<Policy PolicyId="SmartSuranceSensorData"
<Target>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">GET</AttributeValue>
<AttributeDesignator DataType="http://www.w3.org/2001/XMLSchema#string"
AttributeId="urn:oasis:names:tc:xacml:1.0:action:action-id"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:action"
MustBePresent="true"
/>
</Match>
</Target>
<Rule
Effect="Permit"
RuleId="VehicleLocation">
<Description>Allows access to vehicle location data every 1000 milliseconds only.</Description>
<Target>
<Match MatchId="urn:oasis:names:tc:xacml:1.0:function:string-equal">
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#string">/vehicle/location</AttributeValue>
<AttributeDesignator
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:resource"
AttributeId="urn:oasis:names:tc:xacml:1.0:resource:resource-id"
MustBePresent="true"
DataType="http://www.w3.org/2001/XMLSchema#string"/>
</Match>
</Target>
<Condition>
<!--Checking with the Access Log Database and comparing last successful access with the current request-->
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:integer-greater-than-or-equal">
<Apply FunctionId="urn:oasis:names:tc:xacml:1.0:function:integer-one-and-only">
<AttributeDesignator DataType="http://www.w3.org/2001/XMLSchema#integer"
AttributeId="urn:tf:cyber:xacml:polling-frequency:time-since-last-access:ms"
Category="urn:oasis:names:tc:xacml:3.0:attribute-category:environment"
MustBePresent="true"
/>
</Apply>
<AttributeValue DataType="http://www.w3.org/2001/XMLSchema#integer">1000</AttributeValue>
</Apply>
</Condition>
</Rule>
7.3. Discussion
- Functional evaluation based on authorization policies for the defined use case was valid because access to vehicle sensor data was granted or denied only after policy evaluation;
- ABAC-based XACML access control model with additional components (XACML4M) can satisfy signal access, time-based access, location-based access, and frequency-based access requirements in automotive.
8. Conclusions and Future Work
- Vehicle Data Environment (VDE) integrated with Policy Enforcement Point (PEP): PEP first receives all incoming access requests from applications and services, while VDE enables vehicle sensor data to be accessed.
- Time Extensions: Provide time period data type as an attribute for policy evaluation by PDP.
- GeoLocation Provider: Provides geospatial data type as an attribute and also retrieves the current location of the vehicle for policy evaluation by the PDP.
- Polling Frequency Provider: To fetch the timestamp of the last access made by a requesting entity, e.g., an application or a service.
- Access Log Service: To log the last successful access made by a requesting entity, e.g., an application or a service.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Collingwood, L. Privacy implications and liability issues of autonomous vehicles. Inf. Commun. Technol. Law 2017, 26, 32–45. [Google Scholar] [CrossRef]
- Miller, C.; Valasek, C. Remote exploitation of an unaltered passenger vehicle. In Proceedings of the Black Hat USA, Las Vegas, NV, USA, 1–4 August 2015; Volume 2015. [Google Scholar]
- Pesé, M.D.; Shin, K.G. Survey of Automotive Privacy Regulations and Privacy-Related Attacks; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Krontiris, I.; Grammenou, K.; Terzidou, K.; Zacharopoulou, M.; Tsikintikou, M.; Baladima, F.; Sakellari, C.; Kaouras, K. Autonomous Vehicles: Data Protection and Ethical Considerations. In Proceedings of the Computer Science in Cars Symposium, CSCS ’20, Feldkirchen, Germany, 2 December 2020; Association for Computing Machinery: New York, NY, USA, 2020. [Google Scholar] [CrossRef]
- Rumez, M.; Duda, A.; Gründer, P.; Kriesten, R.; Sax, E. Integration of Attribute-based Access Control into Automotive Architectures. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; pp. 1916–1922. [Google Scholar] [CrossRef]
- Gupta, M.; Benson, J.; Patwa, F.; Sandhu, R. Dynamic Groups and Attribute-Based Access Control for Next-Generation Smart Cars. In Proceedings of the Ninth ACM Conference on Data and Application Security and Privacy, CODASPY ’19, Richardson, TX, USA 25–27 March 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 61–72. [Google Scholar] [CrossRef]
- Kim, D.; Ju, H.; Jung, B.; Na, J.C. An Access Control Method for Vehicle Management System. In Proceedings of the 9th International Conference on Information and Communication Technology Convergence: ICT Convergence Powered by Smart Intelligence, ICTC 2018, Jeju, Republic of Korea, 17–19 October 2018; pp. 949–952. [Google Scholar] [CrossRef]
- Kim, D.K.; Song, E.; Yu, H. Introducing Attribute-Based Access Control to AUTOSAR; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2016. [Google Scholar]
- Coppola, P.; Silvestri, F. Autonomous vehicles and future mobility solutions. In Autonomous Vehicles and Future Mobility; Coppola, P., Esztergár-Kiss, D., Eds.; Elsevier: Amsterdam, The Netherlands, 2019; pp. 1–15. [Google Scholar] [CrossRef]
- Fleming, W. New Automotive Sensors—A Review. Sensors 2008, 8, 1900–1921. [Google Scholar] [CrossRef]
- Tyler, N. Safe and Secure. 2016. Available online: https://assets.markallengroup.com//article-images/149323/P24-25.pdf (accessed on 30 November 2022).
- Siegel, J.E.; Erb, D.C.; Sarma, S.E. A Survey of the Connected Vehicle Landscape—Architectures, Enabling Technologies, Applications, and Development Areas. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2391–2406. [Google Scholar] [CrossRef]
- Ahangar, M.N.; Ahmed, Q.Z.; Khan, F.A.; Hafeez, M. A Survey of Autonomous Vehicles: Enabling Communication Technologies and Challenges. Sensors 2021, 21, 706. [Google Scholar] [CrossRef] [PubMed]
- Roddeck, W. Aktoren. In Einführung in die Mechatronik; Vieweg+Teubner Verlag: Wiesbaden, Germany, 1997; pp. 330–371. [Google Scholar] [CrossRef]
- Le, V.H.; Hartog, J.; Zannone, N. Security and privacy for innovative automotive applications: A survey. Comput. Commun. 2018, 132, 17–41. [Google Scholar] [CrossRef]
- Nolte, T.; Hansson, H.; Lo Bello, L. Automotive communications-past, current and future. In Proceedings of the 2005 IEEE Conference on Emerging Technologies and Factory Automation, Catania, Italy, 19–22 September 2005. [Google Scholar] [CrossRef]
- Requirements for the application of ECUs in e-mobility originally qualified for gasoline cars. Microelectron. Reliab. 2016, 64, 140–144. [CrossRef]
- Sommer, C.; Dressler, F. Vehicular Networking; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar] [CrossRef]
- Albouq, S.S.; Fredericks, E.M. Securing communication between service providers and road side units in a connected vehicle infrastructure. In Proceedings of the 2017 IEEE 16th International Symposium on Network Computing and Applications, NCA 2017, Cambridge, MA, USA, 30 October–1 November 2017; pp. 1–5. [Google Scholar] [CrossRef]
- Hu, V.; Ferraiolo, D.; Kuhn, D.; Schnitzer, A.; Sandlin, K.; Miller, R.; Scarfone, K. Guide to Attribute Based access Control (ABAC) Definition and Considerations; Special Publication; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2014; pp. 162–800. [Google Scholar]
- eXtensible Access Control Markup Language (XACML) Version 3.0. 22 January 2013. OASIS Standard. Available online: https://docs.oasis-open.org/xacml/3.0/xacml-3.0-core-spec-os-en.html (accessed on 30 November 2022).
- W3C. W3C Automotive Working Group. 2020. Available online: https://www.w3.org/groups/wg/auto (accessed on 30 November 2022).
- Ashutosh, A.; Gerl, A. Access Control for a Connected Vehicle Ecosystem. In Proceedings of the 2021 11th International Conference on Advanced Computer Information Technologies, ACIT 2021-Proceedings, Deggendorf, Germany, 15–17 September 2021; pp. 479–482. [Google Scholar] [CrossRef]
- Kchaou, A.; Ayed, S.; Abassi, R.; Fatmi, S.G.E. Smart Contract-Based Access Control for the Vehicular Networks. In Proceedings of the 2020 International Conference on Software, Telecommunications and Computer Networks (SoftCOM), Split, Croatia, 17–19 September 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Layered Software Architecture. 2021. Available online: https://www.autosar.org/fileadmin/user_upload/standards/classic/21-11/AUTOSAR_EXP_LayeredSoftwareArchitecture.pdf (accessed on 30 November 2022).
- Plappert, C.; Zelle, D.; Krauß, C.; Lange, B.; Mauthöfer, S.; Walter, J.; Abendroth, B.; Robrahn, R.; von Pape, T.; Decke, H. A privacy-aware data access system for automotive applications. In Proceedings of the 15th ESCAR Embedded Security in Cars Conference, Berlin, Germany, 7–8 November 2017; pp. 27–65. [Google Scholar]
- Zhang, Q.; Zhong, H.; Cui, J.; Ren, L.; Shi, W. AC4AV: A Flexible and Dynamic Access Control Framework for Connected and Autonomous Vehicles. IEEE Internet Things J. 2021, 8, 1946–1958. [Google Scholar] [CrossRef]
- Alsarra, S.; Yen, I.L.; Huang, Y.; Bastani, F.; Thuraisingham, B. An OpenRBAC Semantic Model for Access Control in Vehicular Networks. In Proceedings of the 24th ACM Symposium on Access Control Models and Technologies, SACMAT ’19, Toronto, ON, Canada, 3–6 June 2019; Association for Computing Machinery: New York, NY, USA, 2019; pp. 93–102. [Google Scholar] [CrossRef]
- OW2. AuthzForce Community Edition. Available online: https://github.com/authzforce (accessed on 30 November 2022).
- WSO2. wso2/balana. Available online: https://github.com/wso2/balana (accessed on 30 November 2022).
- Abbreviated Language for Authorization Version 1.0. 2015. Available online: https://www.oasis-open.org/committees/download.php/55228/alfa-for-xacml-v1.0-wd01.doc (accessed on 30 November 2022).
- Ouaddah, A.; Mousannif, H.; Abou Elkalam, A.; Ait Ouahman, A. Access control in the Internet of Things: Big challenges and new opportunities. Comput. Netw. 2017, 112, 237–262. [Google Scholar] [CrossRef]
- Heydon, A.; Maimone, M.; Tygar, J.; Wing, J.; Zaremski, A. Miro: visual specification of security. IEEE Trans. Softw. Eng. 1990, 16, 1185–1197. [Google Scholar] [CrossRef]
- Giordano, M.; Polese, G. Visual Computer-Managed Security: A Framework for Developing Access Control in Enterprise Applications. IEEE Softw. 2013, 30, 62–69. [Google Scholar] [CrossRef]
- Basin, D.; Doser, J.; Lodderstedt, T. Model Driven Security: From UML Models to Access Control Infrastructures. ACM Trans. Softw. Eng. Methodol. 2006, 15, 39–91. [Google Scholar] [CrossRef]
- Koch, M.; Mancini, L.V.; Parisi-Presicce, F. A Graph-Based Formalism for RBAC. ACM Trans. Inf. Syst. Secur. 2002, 5, 332–365. [Google Scholar] [CrossRef]
- Nergaard, H.; Ulltveit-Moe, N.; Terje, G. A scratch-based graphical policy editor for XACML. In Proceedings of the 2015 International Conference on Information Systems Security and Privacy (ICISSP), Angers, France, 9–11 February 2015; pp. 1–9. [Google Scholar]
- Gerl, A.; Meier, B.; Becher, S. Let Users Control Their Data—Privacy Policy-Based User Interface Design. In Proceedings of the Human Interaction and Emerging Technologies, Nice, France, 22–24 August 2019; Ahram, T., Taiar, R., Colson, S., Choplin, A., Eds.; Springer: Cham, Switzerland, 2020; pp. 790–795. [Google Scholar] [CrossRef]
- JSON Profile of XACML 3.0 Version 1.0. 2017. Available online: https://docs.oasis-open.org/xacml/xacml-json-http/v1.0/xacml-json-http-v1.0.html (accessed on 30 November 2022).
- XACML v3.0 Time Extensions Version 1.0. 2019. Available online: https://docs.oasis-open.org/xacml/xacml-3.0-time-extensions/v1.0/csprd01/xacml-3.0-time-extensions-v1.0-csprd01.html (accessed on 30 November 2022).
- OGC Geospatial eXensible Access Control Markup Language (GeoXACML) 3.0 Core. 2013. Available online: https://portal.opengeospatial.org/files/?artifact_id=55231 (accessed on 30 November 2022).
- XACML4M. XACML4M Implementation. Available online: https://gitlab.com/simonwagner/automotive-access-control/ (accessed on 30 November 2022).
- Foundation, R.P. Raspberry Pi 4 Tech Specs. Available online: https://www.raspberrypi.com/products/raspberry-pi-4-model-b/specifications/ (accessed on 29 November 2022).
- DIRECTIVE 98/69/EC. European Union. 1998. Available online: https://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=CONSLEG:1998L0069:19981228:EN:PDF (accessed on 30 November 2022).
- Limited, Q.S.S. BlackBerry QNX Automotive Software for Connected and Autonomous Vehicles. Available online: https://blackberry.qnx.com/en/industries/connected-autonomous-vehicles (accessed on 16 February 2022).
- GmbH, V.I. MICROSAR Classic-Die Intelligente Implementierung des AUTOSAR Classic-Standards. Available online: https://www.vector.com/de/de/produkte/produkte-a-z/embedded-components/microsar/ (accessed on 16 February 2022).
- OpenStreetMap Contributors. 2017. Available online: https://www.openstreetmap.org (accessed on 30 November 2022).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Literature | SAC | FBAC | TBAC | LBAC | Access Control Model |
|---|---|---|---|---|---|
| Kim et al. [7] | ✓ | × | × | × | RBAC |
| Gupta et al. [6] | ✓ | × | × | ✓ | ABAC |
| Rumez et al. [5] | ✓ | ✓ | × | × | ABAC |
| Kim et al. [8] | ✓ | ✓ | × | × | ABAC |
| Plappert et al. [26] | ✓ | ✓ | × | ✓ | ABAC |
| Zhang et al. [27] | ✓ | × | ✓ | ✓ | DAC, IBAC, ABAC |
| Alsarra et al. [28] | ✓ | × | ✓ | ✓ | OpenRBAC |
| Albouq et al. [19] | ✓ | × | × | × | ABAC |
| Kchaou et al. [24] | × | × | × | × | ABAC |
| Board | Raspberry Pi 4 |
| CPU | Broadcom BCM2711 (ARMv8), 4x 1.5GHz (performance governor) |
| Memory | 4GB LPDDR4 @ 3200MHz |
| Storage | Netac 32GB microSD (UHS-I) |
| OS | Ubuntu 22.04 (arm64) |
| JVM | OpenJDK JRE 11 |
| GPS | VK-162, UBX-G7020 chipset |
| OBD-II | Veepak OBD-II Adapter (ELM327 clone-based) |
| Vehicle | Peugeot 108 compact car |
| Requirement | XACML4M |
|---|---|
| Signal Access | ✓ |
| Location-Based Access | ✓ |
| Time-Based Access | ✓ |
| Frequency-Based Access | ✓ |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ashutosh, A.; Gerl, A.; Wagner, S.; Brunie, L.; Kosch, H. XACML for Mobility (XACML4M)—An Access Control Framework for Connected Vehicles. Sensors 2023, 23, 1763. https://doi.org/10.3390/s23041763
Ashutosh A, Gerl A, Wagner S, Brunie L, Kosch H. XACML for Mobility (XACML4M)—An Access Control Framework for Connected Vehicles. Sensors. 2023; 23(4):1763. https://doi.org/10.3390/s23041763
Chicago/Turabian StyleAshutosh, Ashish, Armin Gerl, Simon Wagner, Lionel Brunie, and Harald Kosch. 2023. "XACML for Mobility (XACML4M)—An Access Control Framework for Connected Vehicles" Sensors 23, no. 4: 1763. https://doi.org/10.3390/s23041763
APA StyleAshutosh, A., Gerl, A., Wagner, S., Brunie, L., & Kosch, H. (2023). XACML for Mobility (XACML4M)—An Access Control Framework for Connected Vehicles. Sensors, 23(4), 1763. https://doi.org/10.3390/s23041763