
Health Monitoring of Serial Structures Applying Piezoelectric Film Sensors and Modal Passport

 ,
,
Abstract
1. Introduction
- sensor type optimization for SHM application in serial structures
- methodology for considering the similarity and difference of modal properties between serial structures aiming for SHM
- experimental verification of the approach to SHM that combines piezo films, OMA and the methodology of modal properties consideration for serial structures
- investigation of the effect of differences between series samples on the variation of modal parameters and assessment of their applicability for monitoring.
2. Materials and Methods
2.1. Problem Analysis
2.1.1. Compact Measurement System
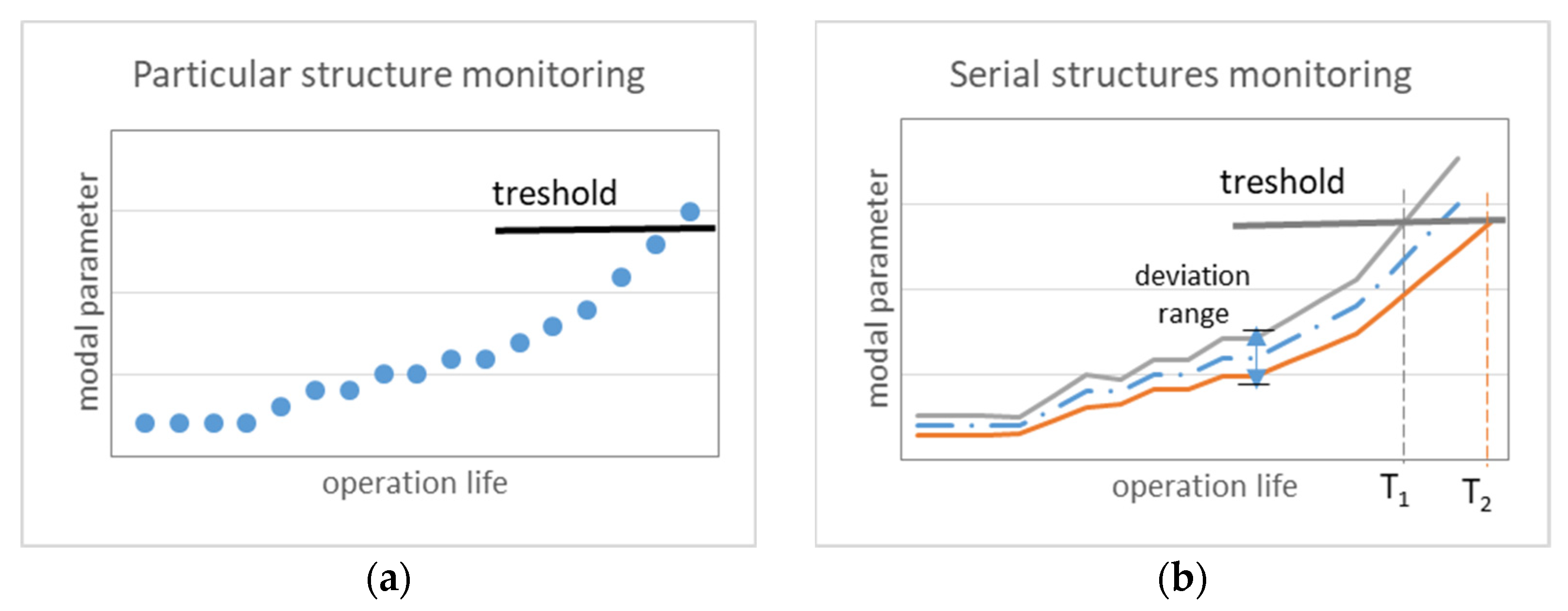
2.1.2. Modal Variation between Serial Structures
2.2. Application of MP Techniques
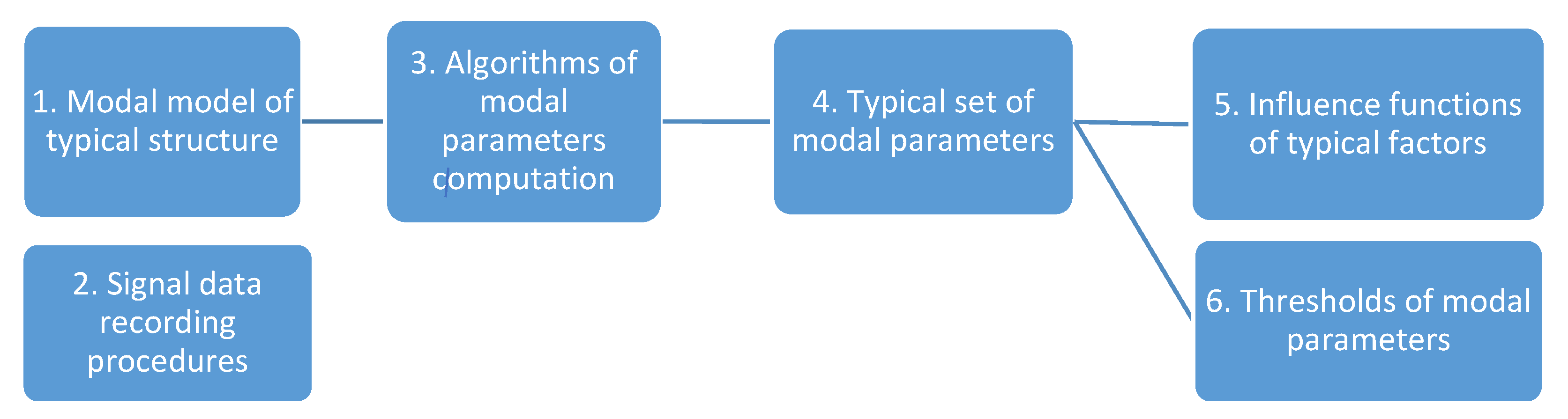
2.2.1. Modal Passport
- (a)
- Typical passport
- (b)
- Individual passport
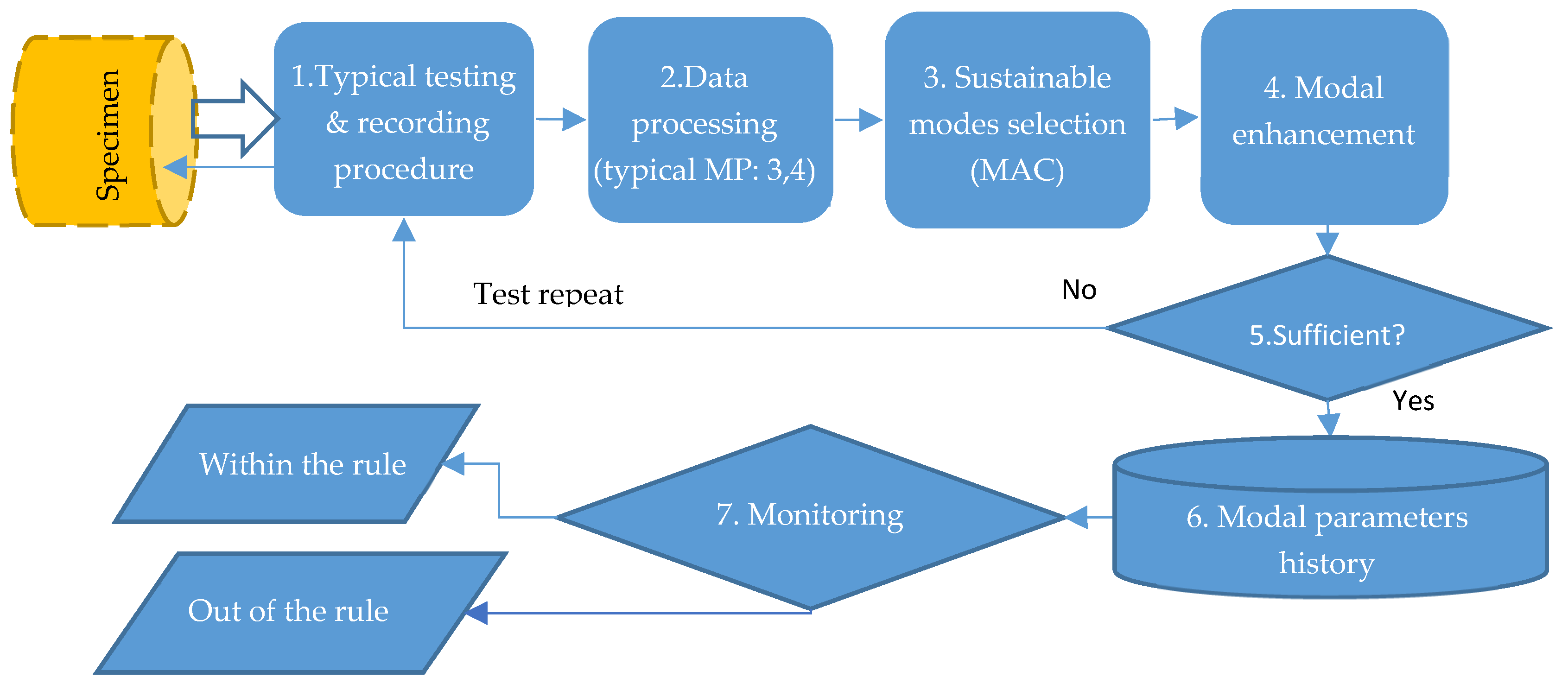
2.2.2. Modal Estimation
2.2.3. Modal Enhancement
2.2.4. Modal Difference
3. Experiments
- manufacturing the sample series and inspection of their structural deviations
- FE modeling of the typical sample and its structural deviations
- modal tests of specimens
- assessment of modal properties and modal deviations of the specimens
- analysis of the applicability of the MP parameters for specimen monitoring.
3.1. Serial Samples
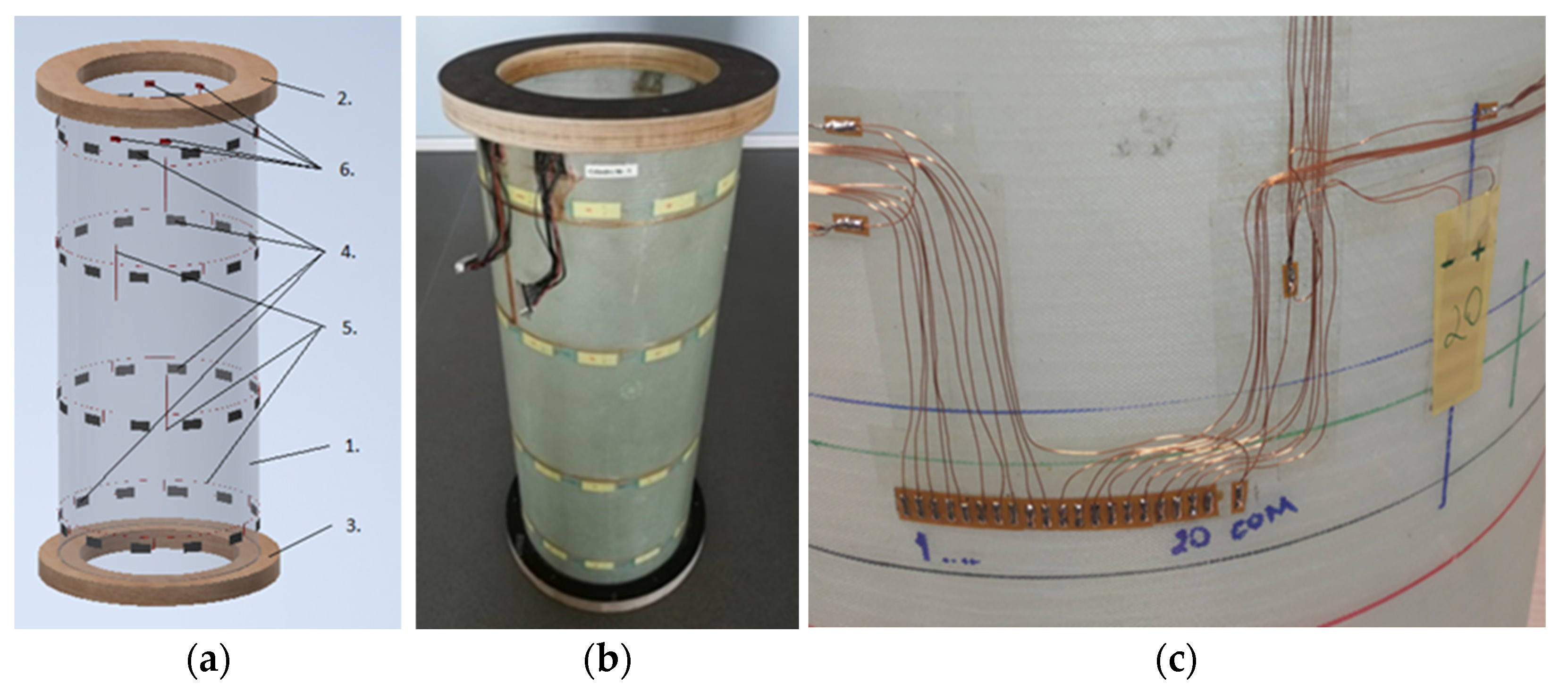
3.1.1. Design and Manufacturing
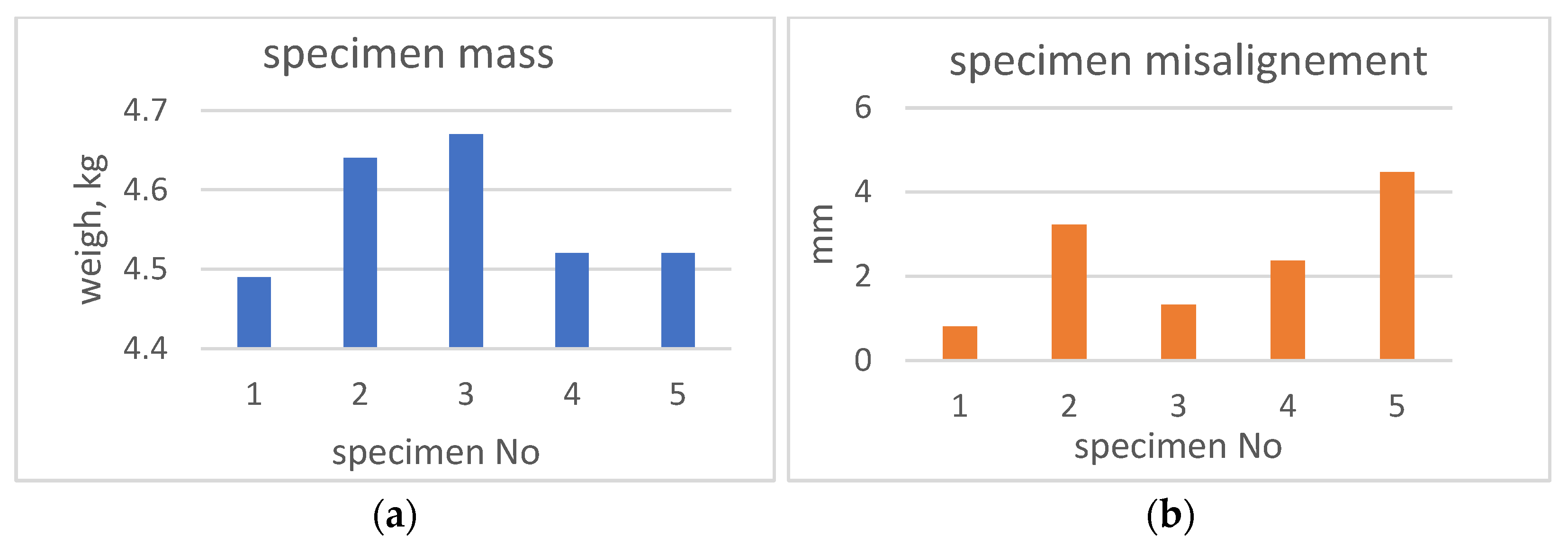
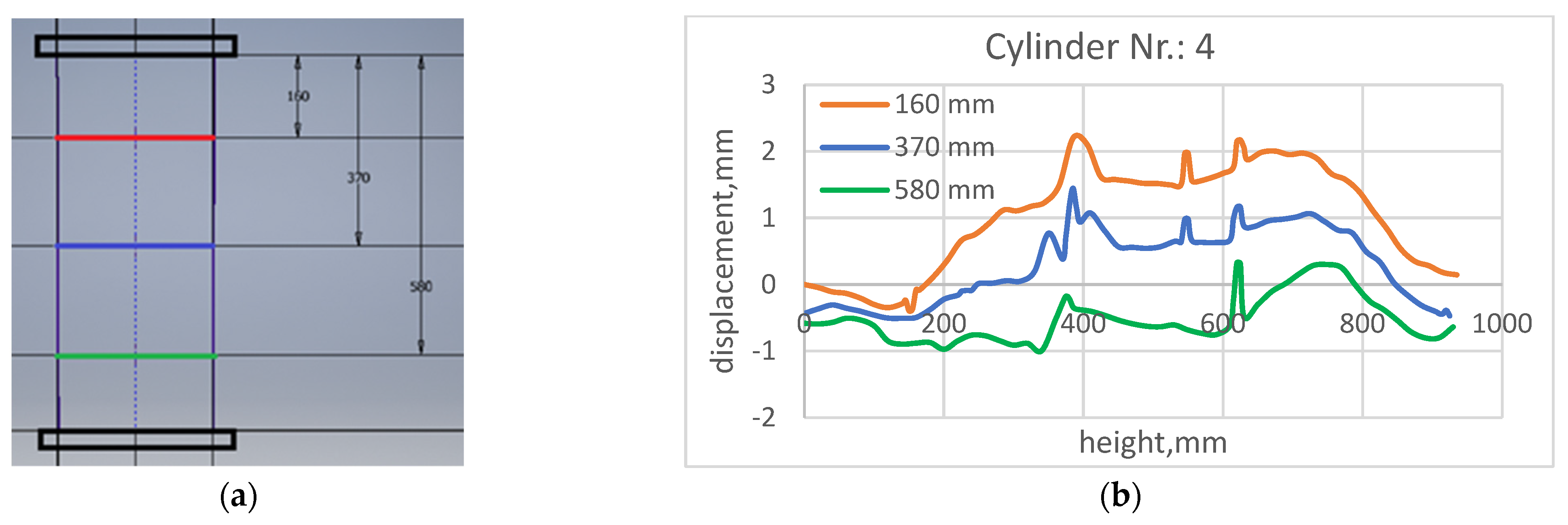
3.1.2. Structural Deviations between Samples
3.2. Modeling
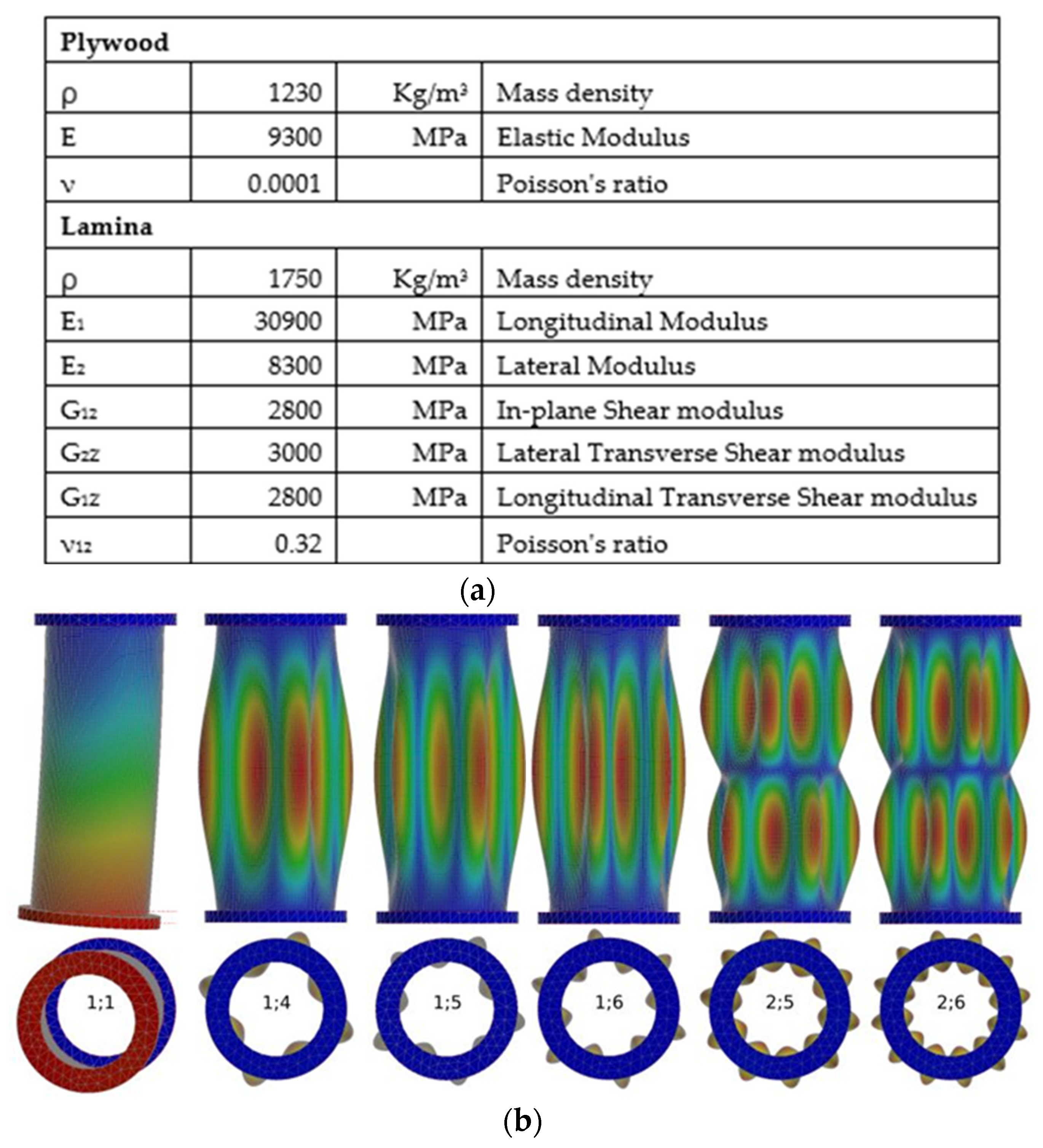
3.2.1. Typical Sample
3.2.2. Modeling of Deviations
3.3. Modal Testing
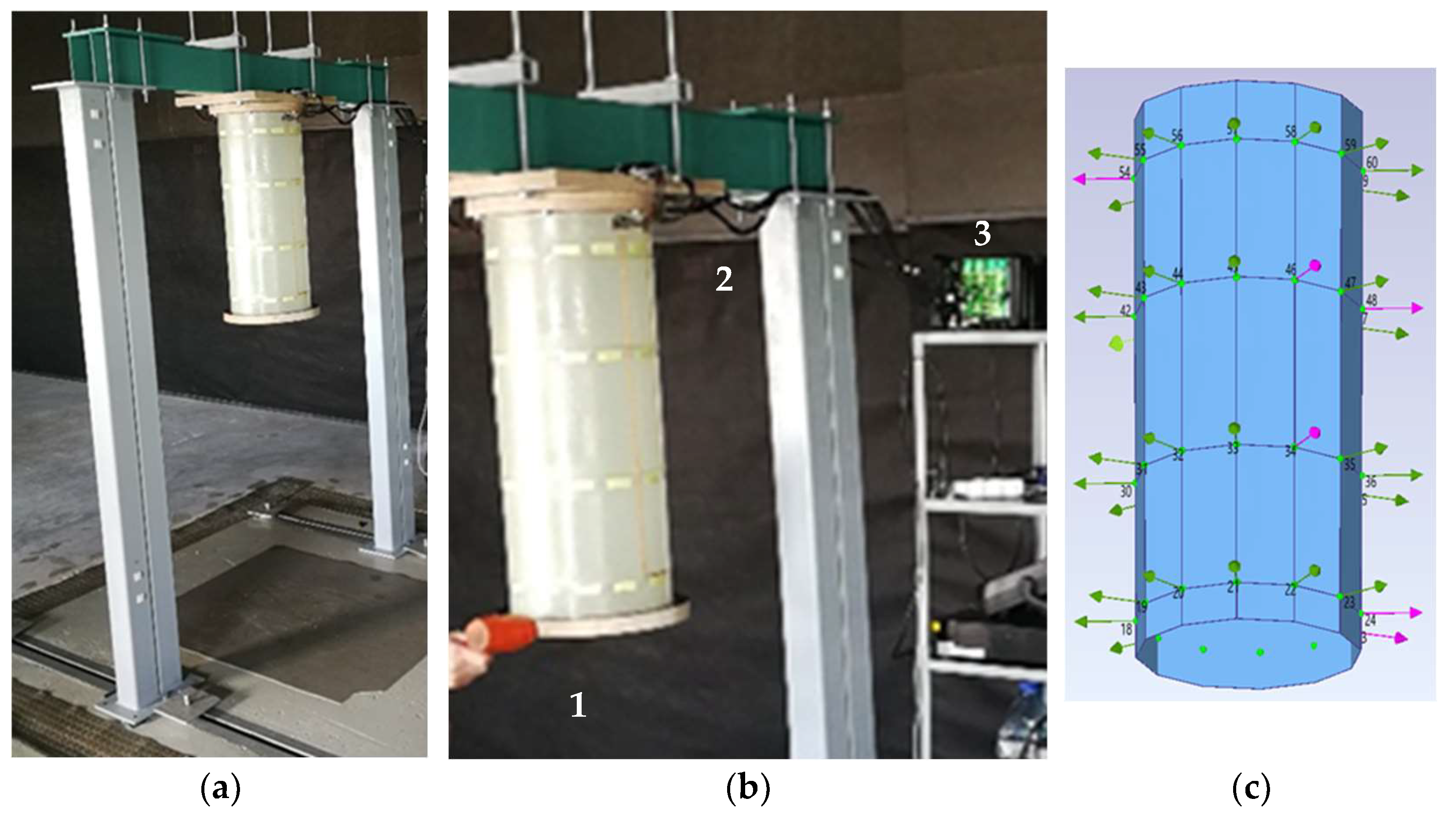
3.3.1. Test Rig and Measurement System
- the sensor network of a specimen with 48 piezoelectric film sensors (type DT1-028K N/TH), the signals of which were routed to 4 D-sub connectors;
- 4 cables connecting the sensor network to the measurement unit;
- a 48-channel measuring unit, 3660-C, with 4 modules, 3053-B120 (Brüel and Kjaer);
- a laptop computer with software for vibration recording.
3.3.2. Testing, Measurements and Primary Estimates
3.4. Modal Estimation of Specimens
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Márquez, F.P.G.; Chacón, A.M.P. A review of non-destructive testing on wind turbines blades. Renew. Energy 2020, 161, 998–1010. [Google Scholar] [CrossRef]
- Civera, M.; Surace, C. Non-Destructive Techniques for the Condition and Structural Health Monitoring of Wind Turbines: A Literature Review of the Last 20 Years. Sensors 2022, 22, 1627. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Y.K.; Tian, G.Y.; Lu, R.-S.; Zhang, H.A. Review of Optical NDT Technologies. Sensors 2011, 11, 7773–7798. [Google Scholar] [CrossRef] [PubMed]
- Hudec, R.; Janousek, L.; Benco, M.; Makys, P.; Wieser, V.; Zachariasova, M.; Pacha, M.; Vavrus, V.; Vestenicky, M. Structural Health Monitoring of Helicopter Fuselage. Commun. -Sci. Lett. Univ. Zilina 2013, 15, 95–101. [Google Scholar] [CrossRef]
- Limongelli, M.P.; Manoach, E.; Quqa, S.; Giordano, P.F.; Bhowmik, B.; Pakrashi, V. Vibration Response-Based Damage Detection. In Structural Health Monitoring Damage Detection Systems for Aerospace; Sause, M.G.R., Jasiūnienė, E., Eds.; Springer Aerospace Technology; Springer: Cham, Switzerland, 2021. [Google Scholar] [CrossRef]
- Rucevskis, S.; Wesolowski, M.; Chate, A. Damage detection in laminated composite beam by using vibration data. J. Vibroengineering 2009, 11, 363–373. [Google Scholar]
- Rajkumar, D.R.; Santhy, K.; Padmanaban, K.P. Influence of Mechanical Properties on Modal Analysis of Natural Fiber Reinforced Laminated Composite Trapezoidal Plates. J. Nat. Fibers 2021, 18, 2139–2155. [Google Scholar] [CrossRef]
- Fritzen, C.-P. Vibration-Based Methods for SHM. STO-EN-AVT-220. Available online: https://www.sto.nato.int/publications/STO%20Educational%20Notes/STO-EN-AVT-220/EN-AVT-220-05.pdf (accessed on 12 January 2023).
- Hearn, G.; Testa, R. Modal Analysis for Damage Detection in Structures. Journal of Structural Engineering 1991, 117, 3042–3062. [Google Scholar] [CrossRef]
- Ramirez, A.S.; Loendersloot, R.; Tinga, T. Helicopter Rotor Blade Monitoring using Autonomous Wireless Sensor Network. In Proceedings of the 10th International Conference on Condition Monitoring and Machinery Failure Prevention Technologies, Krakow, Poland, 18–20 June 2013; pp. 775–782. [Google Scholar]
- White, J.; Adams, D.; Rumsey, M. Modal Analysis of CX-100 Rotor Blade and Micon 65/13 Wind Turbine; Proceedings of the IMAC-XXVIII: Jacksonville, FL, USA, 2010. [Google Scholar]
- Dragan, K. Structural Health Monitoring Approach to the Aerospace Structures. Fatigue Aircr. Struct. 2010, 1, 14–18. [Google Scholar] [CrossRef]
- Brincker, R.; Ventura, C. Introduction to Operational Modal Analysis; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Peeters, B.; De Roeck, G.; Pollet, T.; Schueremans, L. Stochastic Subspace Techniques Applied to Parameter Identification of Civil engineering structures. In New Advances in Modal Synthesis of Large Structures: Non-Linear, Damped and Non-Deterministic Cases; Jezequel, L., Ed.; CRC Press: Lyon, France, 1995; pp. 151–162. [Google Scholar]
- Brincker, R.; Zhang, L.; Anderson, P. Modal Identification from Ambient Response using Frequency Domain Decomposition. In Proceedings of the 18th IMAC, San Antonio, TX, USA, 7–10 February 2000. [Google Scholar]
- Janeliukstis, R.; Mironovs, D.; Safonovs, A. Statistical Structural Integrity Control of Composite Structures Based on an Automatic Operational Modal Analysis—A Review. Mech Compos. Mater 2022, 58, 181–208. [Google Scholar] [CrossRef]
- Abdelghani, M.; Goursat, M.; Biolchini, T. On-Line Modal Monitoring of Aircraft Structures under Unknown Excitation. Mech. Syst. Signal Process. 1999, 13, 839–853. [Google Scholar] [CrossRef]
- Rizo-Patron, S.; Sirohi, J. Operational Modal Analysis of a Helicopter Rotor Blade Using Digital Image Correlation. Exp. Mech. 2016, 57, 367–375. [Google Scholar] [CrossRef]
- Mironov, A.; Mironovs, D. Modal Passport of Dynamically Loaded Structures: Application to Composite Blades. In Proceedings of the 13th International Conference “Modern Building Materials, Structures and Techniques” (MBMST 2019): Selected Papers, Vilnius, Lietuva, 16–17 May 2019; VGTU Press: Vilnius, Lietuva, 2019; pp. 750–757. [Google Scholar]
- Di Lorenzo, E.; Manzato, S.; Peeters, B.; Ruffini, V.; Berring, P.; Haselbach, P.U.; Branner, K. Modal Analysis of Wind Turbine Blades with Different Test Setup Configurations. In Topics in Modal Analysis & Testing, Volume 8; Mains, M.L., Dilworth, B.J., Eds.; Conference Proceedings of the Society for Experimental Mechanics Series; Springer: Cham, Germany, 2020. [Google Scholar] [CrossRef]
- Mironov, A.; Doronkin, P. The demonstrator of structural health monitoring system of helicopter composite blades. Procedia Struct. Integr. 2022, 37, 241–249. [Google Scholar] [CrossRef]
- Mironov, A.; Doronkin, P. An Analysis of Sensitivity of the Monitoring System of Helicopters to Faults of their Blades. Mech Compos. Mater 2021, 57, 233–246. [Google Scholar] [CrossRef]
- Available online: https://svibs.com/applications/operational-modal-analysis/ (accessed on 11 January 2023).
- Böswald, M.; Schwochow, J.; Jelicic, G.; Govers, Y. New Concepts for Ground and Flight Vibration Testing of Aircraft Based on Output-Only Modal Analysis. In Proceedings of the IOMAC 2017—7th International Operational Modal Analysis Conference, Ingolstadt, Germany, 10–12 May 2017. [Google Scholar]
- Petersen, J.; Kube, A.; Geier, S.; Wierach, P. Structure-Integrated Thin-Film Supercapacitor as a Sensor. Sensors 2022, 22, 6932. [Google Scholar] [CrossRef] [PubMed]
- Mironov, A.; Priklonsky, A.; Mironov, D.; Doronkin, P. Application of Deformation Sensors for Structural Health Monitoring of Transport Vehicles. In Reliability and Statistics in Transportation and Communication, Proceedings of the 19th International Conference on Reliability and Statistics in Transportation and Communication, RelStat’19, Riga, Latvia, 16–19 October 2019; Kabashkin, I., Yatskiv, I., Prentkovskis, O., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; Volume 117, pp. 1–14. [Google Scholar] [CrossRef]
- Janeliukstis, R.; Mironovs, D. Smart Composite Structures with Embedded Sensors for Load and Damage Monitoring—A Review. Mech Compos. Mater 2021, 57, 131–152. [Google Scholar] [CrossRef]
- Safonovs, A.; Kovalovs, A.; Mironovs, A.; Chate, A. Finite Element Model of Closed Composite Cylinder and its Experimental Verification. In Proceedings of the 21st International Scientific Conference Engineering for Rural Development, Jelgava, Latvia, 25–27 May 2022. [Google Scholar] [CrossRef]
- Cheng, W.; Zhang, Z.; Lee, S.; He, Z. Source Contribution Evaluation of Mechanical Vibration Signals via Enhanced Independent Component Analysis. ASME J. Manuf. Sci. Eng. 2012, 134, 021014. [Google Scholar] [CrossRef]
- Mironov, A.; Doronkin, P. New technique of vibration diagnostics of turbomachines. In Proceedings of the 8th European Conference on Turbomachinery: Fluid Dynamics and Thermodynamics, ETC 2009—Conference Proceedings, Graz, Austria, 23–27 March 2009; pp. 773–782. [Google Scholar]
- Mironov, A.; Doronkin, P.; Priklonskiy, A.; Yunusov, S. Adaptive Technology Application for Vibration-Based Diagnostics of Roller Bearings on Industrial Plants. Transp. Telecommun. J. 2014, 15, 233–242. [Google Scholar] [CrossRef]
- Allemang, R. The Modal Assurance Criterion (MAC): Twenty Years of Use and Abuse. Sound Vib. 2003, 37, 14–23. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mode | FE Model Frequency, Hz | Frequency Change, % | ||||
|---|---|---|---|---|---|---|
| No | Type | Mass Change | Height Change | Misalign Ment | ||
| Cylinder | Flanges | |||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 1 | 1;1 | 89.59 | −0.33% | −1.02% | −0.46% | 0.12% |
| 2 | 1;1’ | 122.16 | −0.34% | −1.19% | −0.59% | 0.06% |
| 3 | 1;4 | 175.98 | −0.98% | 0.00% | −0.38% | 0.07% |
| 4 | 1;4’ | 176.06 | −0.98% | 0.00% | −0.38% | 0.05% |
| 5 | 1;3 | 194.222 | −0.98% | 0.00% | −0.65% | 0.39% |
| 6 | 1;3’ | 194.415 | −0.98% | 0.00% | −0.65% | 0.27% |
| 7 | 1;5 | 223.262 | −0.98% | 0.00% | −0.13% | −0.02% |
| 8 | 1;5’ | 223.275 | −0.98% | 0.00% | −0.13% | −0.04% |
| 9 | 1;2 | 294.136 | −0.90% | −0.05% | −0.06% | 0.30% |
| 10 | 1;2’ | 295.908 | −0.96% | −0.03% | −0.06% | 0.38% |
| 11 | 1;6 | 308.002 | −0.99% | −0.63% | −0.45% | 0.01% |
| 12 | 1;6’ | 308.004 | −0.99% | −0.68% | −0.45% | 0.00% |
| 13 | 2;5 | 312.95 | −0.99% | −0.05% | −0.30% | 0.00% |
| 14 | 2;5’ | 313.016 | −0.99% | −0.05% | −0.58% | −0.01% |
| 15 | 2;4 | 345.91 | −0.98% | −0.42% | −0.25% | 0.18% |
| 16 | 2;4’ | 346.158 | −0.98% | −0.42% | −0.25% | 0.14% |
| 17 | 2;6 | 357.788 | −0.34% | −0.20% | −0.03% | 0.01% |
| 18 | 2;6’ | 357.797 | −0.98% | −0.20% | −0.52% | 0.00% |
| FEM Model | Frequency, Hz (Experimental Estimates) | Error | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Nr | Order | F, Hz | Sp 1 | Sp 2 | Sp 3 | Sp 4 | Sp 5 | Typ. Sp | STD (1–5) | Unc-ty | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 1 | 1;1 | 89.62 | 78.3 | 78.1 | 78.8 | - | 78.4 | 78.4 | 0.3 | 2.1 | −13% |
| 2 | 1;1’ | 122.52 | 108.4 | 105.9 | 104.0 | 104.4 | 104.8 | 105.5 | 1.8 | 0.9 | −14% |
| 3 | 1;4 | 177.02 | 175.4 | 185.5 | 179.5 | 175.2 | 174.5 | 178.0 | 4.6 | 0.5 | 1% |
| 4 | 1;4’ | 177.10 | 177.6 | 185.5 | 178.9 | 177.2 | 175.9 | 179.0 | 3.8 | 0.3 | 1% |
| 5 | 1;3 | 195.11 | 187.1 | 185.7 | 183.3 | 185.3 | 185.0 | 185.3 | 1.4 | 1.8 | −5% |
| 6 | 1;3’ | 195.31 | 190.5 | 188.4 | 188.4 | 181.0 | 185.0 | 186.7 | 3.7 | 2.9 | −4% |
| 7 | 1;5 | 224.82 | 224.7 | 248.4 | 238.7 | 239.7 | 230.2 | 236.3 | 9.2 | 1.1 | 5% |
| 8 | 1;5’ | 224.83 | 226.3 | 249.2 | 239.2 | 230.8 | 232.4 | 235.6 | 8.9 | 0.7 | 5% |
| 9 | 1;2 | 295.43 | 267.5 | 260.6 | 257.0 | 262.8 | 261.9 | 262.0 | 3.8 | 0.8 | −11% |
| 10 | 1;2’ | 297.31 | 284.0 | 267.7 | 263.5 | 267.2 | 266.2 | 269.7 | 8.2 | 2.7 | −9% |
| 11 | 1;6 | 310.23 | 311.4 | 349.2 | 333.7 | 319.9 | 321.0 | 327.0 | 14.7 | 1.0 | 5% |
| 12 | 2;5 | 314.99 | 317.9 | 332.4 | 324.2 | 316.9 | 315.6 | 321.4 | 7.0 | 1.0 | 2% |
| 13 | 2;5’ | 315.06 | 323.4 | 334.2 | 324.2 | 316.9 | 319.2 | 323.6 | 6.7 | 2.8 | 3% |
| 14 | 2;4 | 347.96 | 355.1 | 356.2 | 348.6 | 347.5 | 344.5 | 350.4 | 5.0 | 2.4 | 1% |
| 15 | 2;6 | 360.37 | 358.5 | 397.1 | 377.3 | 368.2 | 366.6 | 373.5 | 14.7 | 2.3 | 4% |
| Mode | Damping, % (Experimental Estimates) | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Nr | Type | Sp 1 | Sp 2 | Sp 3 | Sp 4 | Sp 5 | Typ.Sp | STD (1…5) | Unc-ty |
| 1 | 2 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 1 | 1;1 | 1.1 | 0.7 | 5.3 | - | 4.3 | 2.8 | 2.28 | 2.72 |
| 2 | 1;1’ | 1.7 | 2.0 | 1.5 | 1.6 | 1.7 | 1.7 | 0.11 | 2.00 |
| 3 | 1;4 | 0.7 | 0.7 | 1.0 | 0.7 | 0.7 | 0.8 | 0.18 | 0.14 |
| 4 | 1;4’ | 0.8 | 0.7 | 0.8 | 0.7 | 0.8 | 0.8 | 0.05 | 0.11 |
| 5 | 1;3 | 0.7 | 0.7 | 0.8 | 0.9 | 0.9 | 0.8 | 0.12 | 0.53 |
| 6 | 1;3’ | 1.1 | 0.8 | 0.8 | 1.1 | 0.9 | 0.9 | 0.16 | 0.57 |
| 7 | 1;5 | 0.7 | 0.8 | 0.7 | 0.6 | 0.7 | 0.7 | 0.09 | 0.61 |
| 8 | 1;5’ | 0.6 | 0.7 | 0.7 | 1.0 | 0.6 | 0.7 | 0.24 | 0.62 |
| 9 | 1;2 | 1.2 | 1.0 | 1.2 | 1.2 | 1.1 | 1.1 | 0.09 | 0.99 |
| 10 | 1;2’ | 0.9 | 1.1 | 1.0 | 1.3 | 1.2 | 1.1 | 0.17 | 1.56 |
| 11 | 1;6 | 0.5 | 0.8 | 0.8 | 1.0 | 0.7 | 0.8 | 0.24 | 0.14 |
| 12 | 2;5 | 0.8 | 0.7 | 0.8 | 1.1 | 0.8 | 0.9 | 0.17 | 0.31 |
| 13 | 2;5’ | 0.7 | 0.8 | 0.8 | 1.1 | 0.9 | 0.9 | 0.16 | 0.65 |
| 14 | 2;4 | 0.8 | 0.7 | 0.8 | 0.8 | 0.9 | 0.8 | 0.06 | 0.89 |
| 15 | 2;6 | 0.7 | 0.3 | 0.9 | 0.9 | 1.0 | 0.8 | 0.35 | 0.75 |
| Mode | Modal Shape Variation | Unc-ty | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Nr | Type | Sp 1 | Sp 2 | Sp 3 | Sp 4 | Sp 5 | Typ.Sp | STD (1...5) | |
| 1 | 2 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 1 | 1;1 | 1.0% | 1.5% | 1.0% | 1.3% | 1.4% | 1.2% | 0.25% | 0.4% |
| 2 | 1;1’ | 0.6% | 2.1% | 0.5% | 0.5% | 0.9% | 0.9% | 0.66% | 0.2% |
| 3 | 1;4 | 0.3% | 0.6% | 0.7% | 1.1% | 0.8% | 0.7% | 0.29% | 0.6% |
| 4 | 1;4’ | 0.4% | 0.3% | 1.6% | 0.2% | 0.3% | 0.6% | 0.57% | 0.7% |
| 5 | 1;3 | 0.5% | 1.3% | 0.4% | 0.3% | 1.2% | 0.8% | 0.47% | 0.5% |
| 6 | 1;3’ | 0.6% | 0.8% | 0.8% | 1.3% | 1.8% | 1.1% | 0.49% | 0.5% |
| 7 | 1;5 | 0.5% | 0.3% | 0.6% | 0.4% | 0.6% | 0.5% | 0.14% | 0.7% |
| 8 | 1;5’ | 0.3% | 0.6% | 0.4% | 0.3% | 0.5% | 0.4% | 0.14% | 0.8% |
| 9 | 1;2 | 0.6% | 0.8% | 0.9% | 1.2% | 1.2% | 0.9% | 0.23% | 0.3% |
| 10 | 1;2’ | 0.8% | 0.6% | 1.2% | 0.8% | 0.9% | 0.9% | 0.21% | 0.3% |
| 11 | 1;6 | 0.4% | 0.7% | 0.4% | 1.0% | 0.3% | 0.6% | 0.30% | 0.5% |
| 12 | 2;5 | 0.5% | 0.5% | 0.4% | 0.8% | 0.6% | 0.6% | 0.15% | 0.6% |
| 13 | 2;5’ | 0.3% | 0.3% | 0.3% | 0.9% | 1.0% | 0.6% | 0.35% | 0.8% |
| 14 | 2;4 | 0.5% | 1.0% | 0.7% | 0.4% | 0.4% | 0.6% | 0.26% | 1.2% |
| 15 | 2;6 | 0.7% | 0.3% | 0.3% | 0.3% | 0.3% | 0.4% | 0.19% | 2.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mironov, A.; Safonovs, A.; Mironovs, D.; Doronkin, P.; Kuzmickis, V. Health Monitoring of Serial Structures Applying Piezoelectric Film Sensors and Modal Passport. Sensors 2023, 23, 1114. https://doi.org/10.3390/s23031114
Mironov A, Safonovs A, Mironovs D, Doronkin P, Kuzmickis V. Health Monitoring of Serial Structures Applying Piezoelectric Film Sensors and Modal Passport. Sensors. 2023; 23(3):1114. https://doi.org/10.3390/s23031114
Chicago/Turabian StyleMironov, Aleksey, Aleksejs Safonovs, Deniss Mironovs, Pavel Doronkin, and Vitalijs Kuzmickis. 2023. "Health Monitoring of Serial Structures Applying Piezoelectric Film Sensors and Modal Passport" Sensors 23, no. 3: 1114. https://doi.org/10.3390/s23031114
APA StyleMironov, A., Safonovs, A., Mironovs, D., Doronkin, P., & Kuzmickis, V. (2023). Health Monitoring of Serial Structures Applying Piezoelectric Film Sensors and Modal Passport. Sensors, 23(3), 1114. https://doi.org/10.3390/s23031114