


Textile-Based Body Capacitive Sensing for Knee Angle Monitoring


Abstract
:1. Introduction
2. Materials and Methods
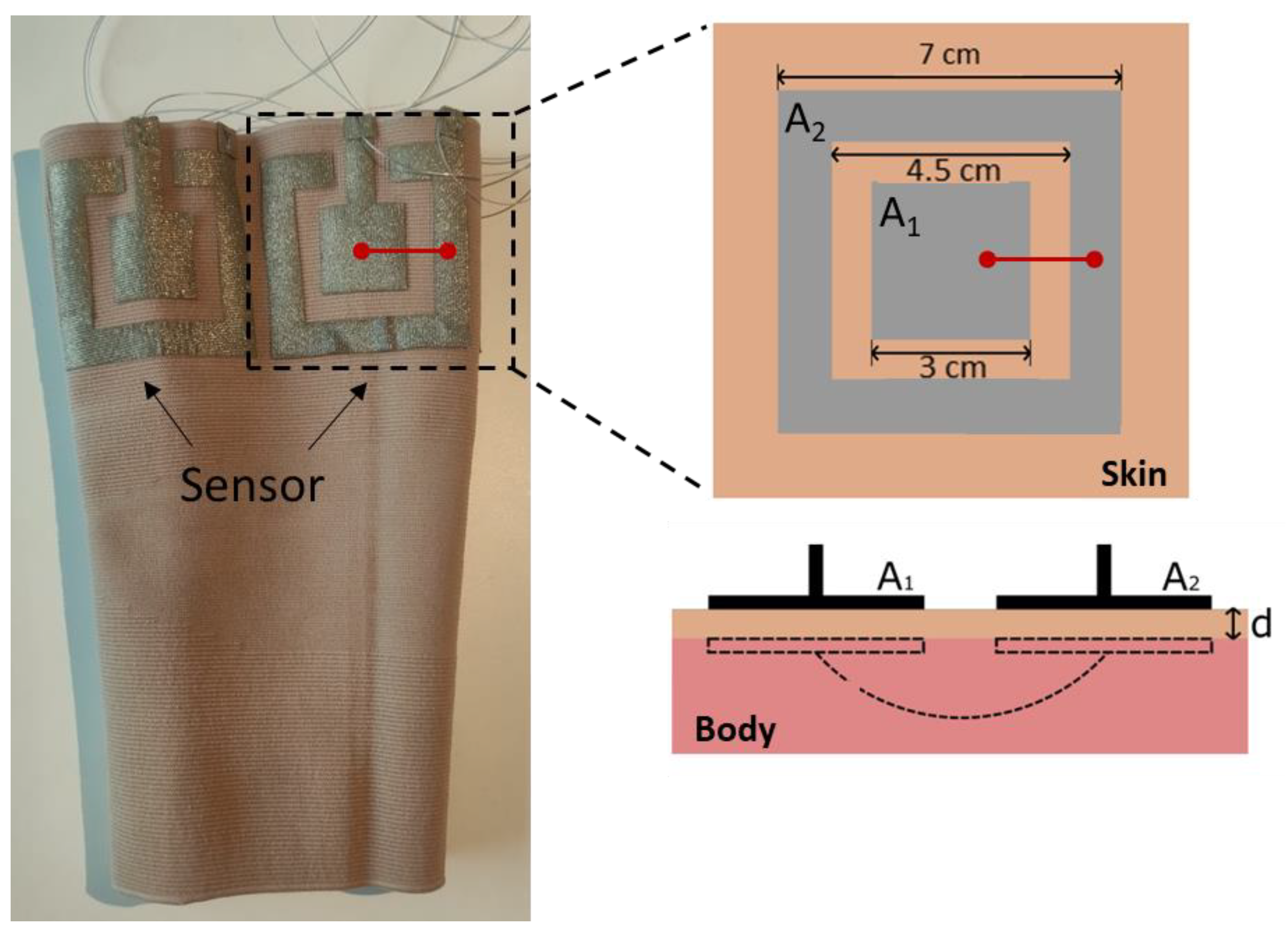
2.1. Hardware
2.2. Experimental Protocol
2.3. Data Analysis
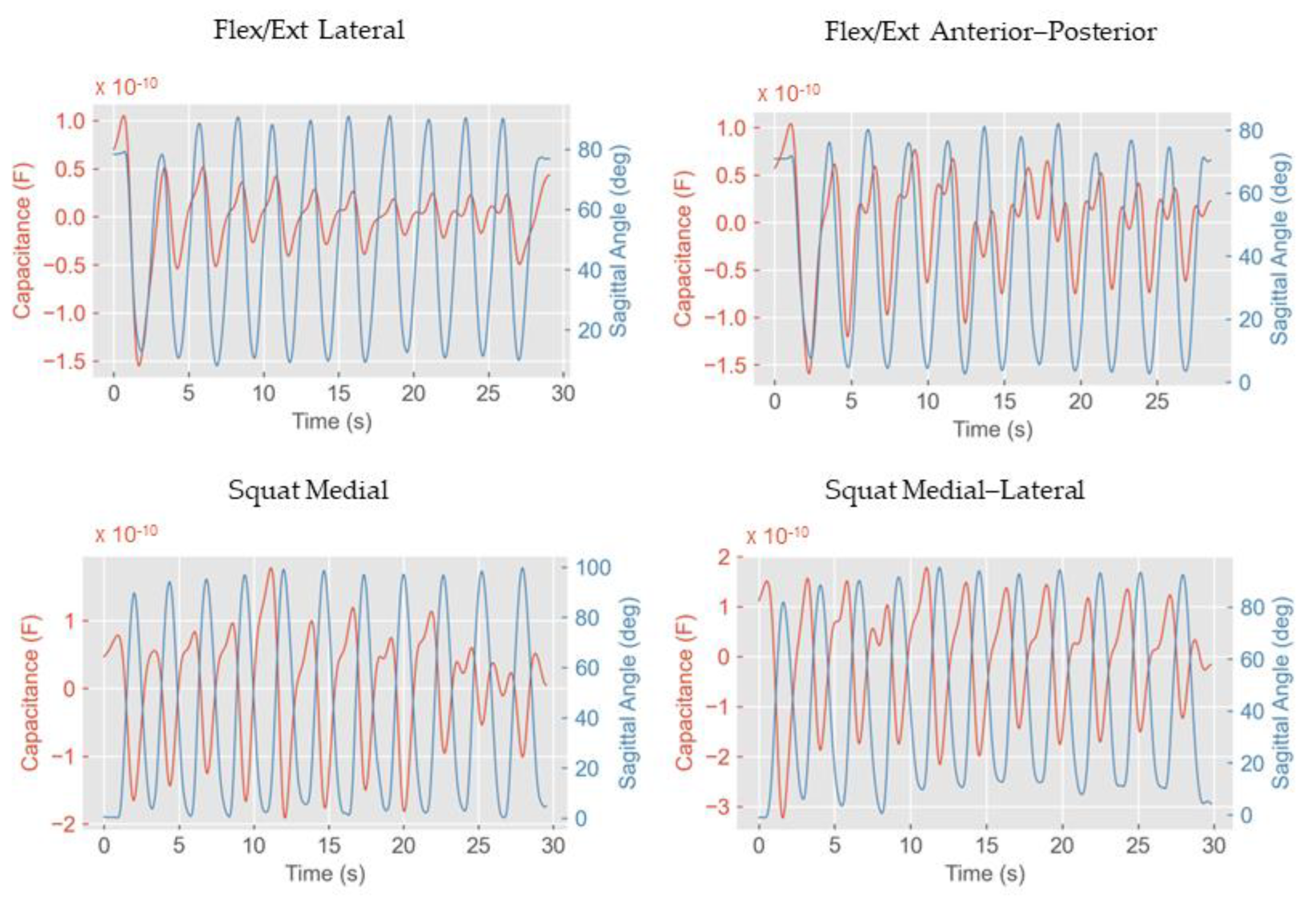
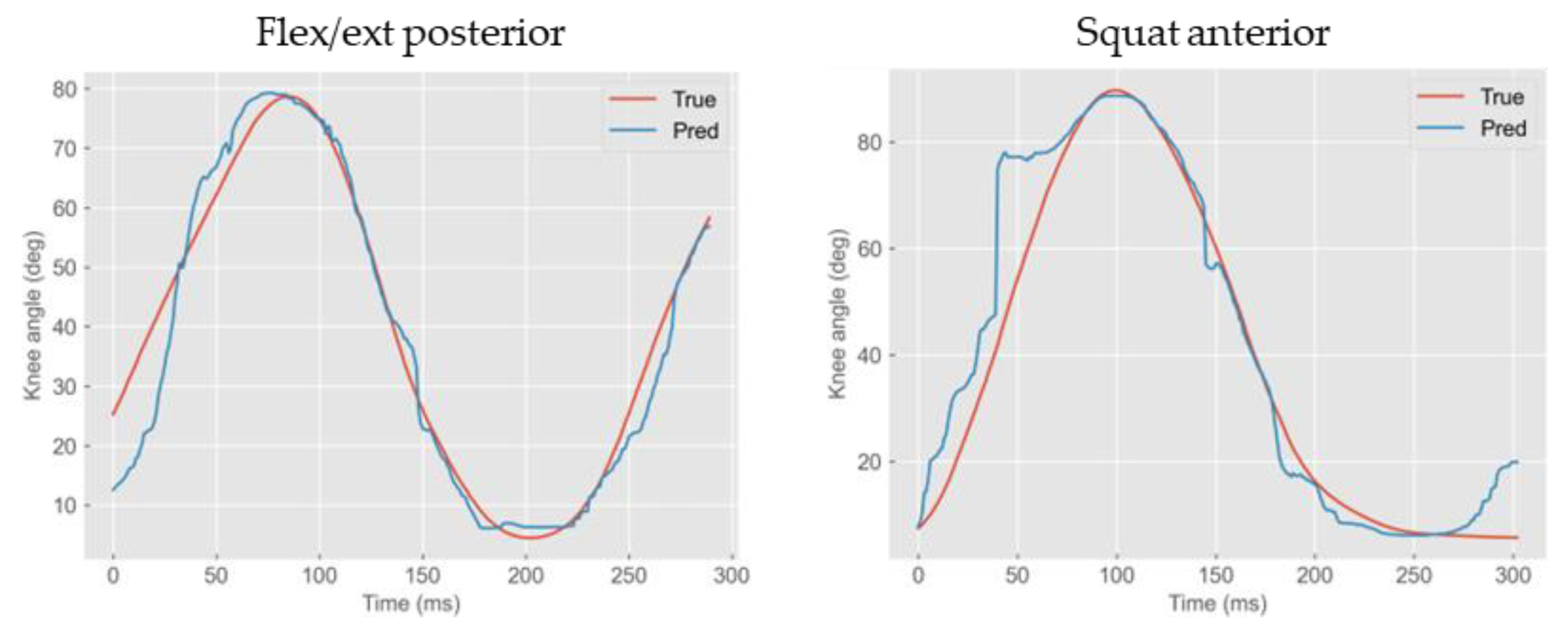
3. Results
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Choudhry, N.A.; Arnold, L.; Rasheed, A.; Khan, I.A.; Wang, L. Textronics—A Review of Textile-Based Wearable Electronics. Adv. Eng. Mater. 2021, 23, 2100469. [Google Scholar] [CrossRef]
- Seyedin, S.; Zhang, P.; Naebe, M.; Qin, S.; Chen, J.; Wang, X.; Razal, J.M. Textile Strain Sensors: A Review of the Fabrication Technologies, Performance Evaluation and Applications. Mater. Horiz. 2019, 6, 219–249. [Google Scholar] [CrossRef]
- Zeng, W.; Shu, L.; Li, Q.; Chen, S.; Wang, F.; Tao, X.M. Fiber-Based Wearable Electronics: A Review of Materials, Fabrication, Devices, and Applications. Adv. Mater. 2014, 26, 5310–5336. [Google Scholar] [CrossRef] [PubMed]
- Heo, J.S.; Eom, J.; Kim, Y.-H.; Park, S.K. Recent Progress of Textile-Based Wearable Electronics: A Comprehensive Review of Materials, Devices, and Applications. Small 2018, 14, 1703034. [Google Scholar] [CrossRef] [PubMed]
- Hannigan, B.C.; Cuthbert, T.J.; Geng, W.; Tavassolian, M.; Menon, C. Understanding the Impact of Machine Learning Models on the Performance of Different Flexible Strain Sensor Modalities. Front. Mater. 2021, 8, 639823. [Google Scholar] [CrossRef]
- Kundu, S.K.; Kumagai, S.; Sasaki, M. A Wearable Capacitive Sensor for Monitoring Human Respiratory Rate. Jpn. J. Appl. Phys. 2013, 52, 04CL05. [Google Scholar] [CrossRef]
- Luis, J.A.; Roa Romero, L.M.; Gómez-Galán, J.A.; Hernández, D.N.; Estudillo-Valderrama, M.Á.; Barbarov-Rostán, G.; Rubia-Marcos, C. Design and Implementation of a Smart Sensor for Respiratory Rate Monitoring. Sensors 2014, 14, 3019–3032. [Google Scholar] [CrossRef] [PubMed]
- Terazawa, M.; Karita, M.; Kumagai, S.; Sasaki, M. Respiratory Motion Sensor Measuring Capacitance Constructed across Skin in Daily Activities. Micromachines 2018, 9, 543. [Google Scholar] [CrossRef] [PubMed]
- Cheng, J.; Amft, O.; Lukowicz, P. Active Capacitive Sensing: Exploring a New Wearable Sensing Modality for Activity Recognition. Plan. Perspect. 2010, 319, 336. [Google Scholar]
- Chen, B.; Zheng, E.; Fan, X.; Liang, T.; Wang, Q.; Wei, K.; Wang, L. Locomotion Mode Classification Using a Wearable Capacitive Sensing System. IEEE Trans. Neural Syst. Rehabil. Eng. 2013, 21, 744–755. [Google Scholar] [CrossRef] [PubMed]
- Geng, W.; Cuthbert, T.J.; Menon, C. Conductive Thermoplastic Elastomer Composite Capacitive Strain Sensors and Their Application in a Wearable Device for Quantitative Joint Angle Prediction. ACS Appl. Polym. Mater. 2021, 3, 122–129. [Google Scholar] [CrossRef]
- Totaro, M.; Poliero, T.; Mondini, A.; Lucarotti, C.; Cairoli, G.; Ortiz, J.; Beccai, L. Soft Smart Garments for Lower Limb Joint Position Analysis. Sensors 2017, 17, 2314. [Google Scholar] [CrossRef] [PubMed]
- Atalay, A.; Sanchez, V.; Atalay, O.; Vogt, D.M.; Haufe, F.; Wood, R.J.; Walsh, C.J. Batch Fabrication of Customizable Silicone-textile Composite Capacitive Strain Sensors for Human Motion Tracking. Adv. Mater. Technol. 2017, 2, 1700136. [Google Scholar] [CrossRef]
- Galli, V.; Sailapu, S.K.; Cuthbert, T.J.; Ahmadizadeh, C.; Hannigan, B.C.; Menon, C. Passive and Wireless All-Textile Wearable Sensor System. Adv. Sci. 2023, 10, e2206665. [Google Scholar] [CrossRef] [PubMed]
- Knit Conductive Fabric—Silver. Available online: https://www.adafruit.com/product/1167. (accessed on 26 October 2023).
- Choi, J.; Hong, K. 3D Skin Length Deformation of Lower Body during Knee Joint Flexion for the Practical Application of Functional Sportswear. Appl. Ergon. 2015, 48, 186–201. [Google Scholar] [CrossRef] [PubMed]
- Karita, M.; Kumagai, S.; Sasaki, M. Respiration Monitoring during 6 Min Walk Using Wearable Sensor Measuring Capacitance Built across Skin. Jpn. J. Appl. Phys. 2021, 61, SA1010. [Google Scholar] [CrossRef]
- Hioki IM3536. Available online: https://www.hioki.com/euro-en/support/faq/detail/id_227#:~:text=The%20final%20accuracy%20using%20the,shown%20in%20the%20screenshot%20below (accessed on 26 October 2023).
- Full Body Modeling with Plug-in Gait. Available online: https://docs.vicon.com/display/Nexus212/Full+body+modeling+with+Plug-in+Gait (accessed on 15 June 2023).
- Gholami, M.; Ejupi, A.; Rezaei, A.; Ferrone, A.; Menon, C. Estimation of Knee Joint Angle Using a Fabric-Based Strain Sensor and Machine Learning: A Preliminary Investigation. In Proceedings of the 2018 7th IEEE International Conference on Biomedical Robotics and Biomechatronics (Biorob), Enschede, The Netherlands, 26–29 August 2018; IEEE: Piscataway, NJ, USA, 2018. [Google Scholar]
- Watson, A.; Sun, M.; Pendyal, S.; Zhou, G. TracKnee: Knee Angle Measurement Using Stretchable Conductive Fabric Sensors. Smart Health 2020, 15, 100092. [Google Scholar] [CrossRef]
- Gholami, M.; Rezaei, A.; Cuthbert, T.J.; Napier, C.; Menon, C. Lower Body Kinematics Monitoring in Running Using Fabric-Based Wearable Sensors and Deep Convolutional Neural Networks. Sensors 2019, 19, 5325. [Google Scholar] [CrossRef] [PubMed]
- Ahmadizadeh, C.; Pousett, B.; Menon, C. Investigation of Channel Selection for Gesture Classification for Prosthesis Control Using Force Myography: A Case Study. Front. Bioeng. Biotechnol. 2019, 7, 331. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flex/Ext Anterior | … | Flex/Ext Posterior | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| C | Cmin | Cmax | Cmean | C’ | … | C | Cmin | Cmax | Cmean | C’ |
| 1.60 × 10−11 | 2.68 × 10−13 | 2.82 × 10−11 | 2.08 × 10−11 | −1.34 × 10−12 | … | 1.41 × 10−10 | 2.24 × 10−11 | 1.41 × 10−10 | 9.68 × 10−11 | −2.50 × 10−12 |
| … | … | … | … | … | … | … | … | … | … | … |
| Col 1 | Col 20 | |||||||||
| Test | Sensor | R2 | RMSE (deg) | MAE (deg) |
|---|---|---|---|---|
| Flex/Ext | A | 0.83 | 10.79 | 6.93 |
| L | 0.77 | 12.19 | 9.89 | |
| M | 0.76 | 13.31 | 10.34 | |
| P | 0.95 | 5.48 | 3.56 | |
| A–P | 0.82 | 11.15 | 5.99 | |
| M–L | 0.86 | 10.46 | 6.74 | |
| Squat | A | 0.93 | 8.13 | 4.9 |
| L | 0.93 | 8.28 | 6.09 | |
| M | 0.99 | 4.15 | 3.28 | |
| P | 0.95 | 7.59 | 6.58 | |
| A–P | 0.89 | 11.56 | 6.39 | |
| M–L | 0.94 | 8.19 | 6.51 |
| Test | Sensor Combination | R2 | RMSE (deg) | MAE (deg) |
|---|---|---|---|---|
| Flex/Ext | A + L + M + P | 0.88 | 7.9 | 2.62 |
| AP + ML | 0.97 | 4.03 | 3.31 | |
| Squat | A + L + M + P | 0.99 | 2.61 | 2.02 |
| AP + ML | 0.94 | 7.52 | 5.7 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Galli, V.; Ahmadizadeh, C.; Kunz, R.; Menon, C. Textile-Based Body Capacitive Sensing for Knee Angle Monitoring. Sensors 2023, 23, 9657. https://doi.org/10.3390/s23249657
Galli V, Ahmadizadeh C, Kunz R, Menon C. Textile-Based Body Capacitive Sensing for Knee Angle Monitoring. Sensors. 2023; 23(24):9657. https://doi.org/10.3390/s23249657
Chicago/Turabian StyleGalli, Valeria, Chakaveh Ahmadizadeh, Raffael Kunz, and Carlo Menon. 2023. "Textile-Based Body Capacitive Sensing for Knee Angle Monitoring" Sensors 23, no. 24: 9657. https://doi.org/10.3390/s23249657
APA StyleGalli, V., Ahmadizadeh, C., Kunz, R., & Menon, C. (2023). Textile-Based Body Capacitive Sensing for Knee Angle Monitoring. Sensors, 23(24), 9657. https://doi.org/10.3390/s23249657