

Graph Trilateration for Indoor Localization in Sparsely Distributed Edge Computing Devices in Complex Environments Using Bluetooth Technology
 , , , ,
, , , , 
Abstract
:1. Introduction
2. Related Work
3. Method
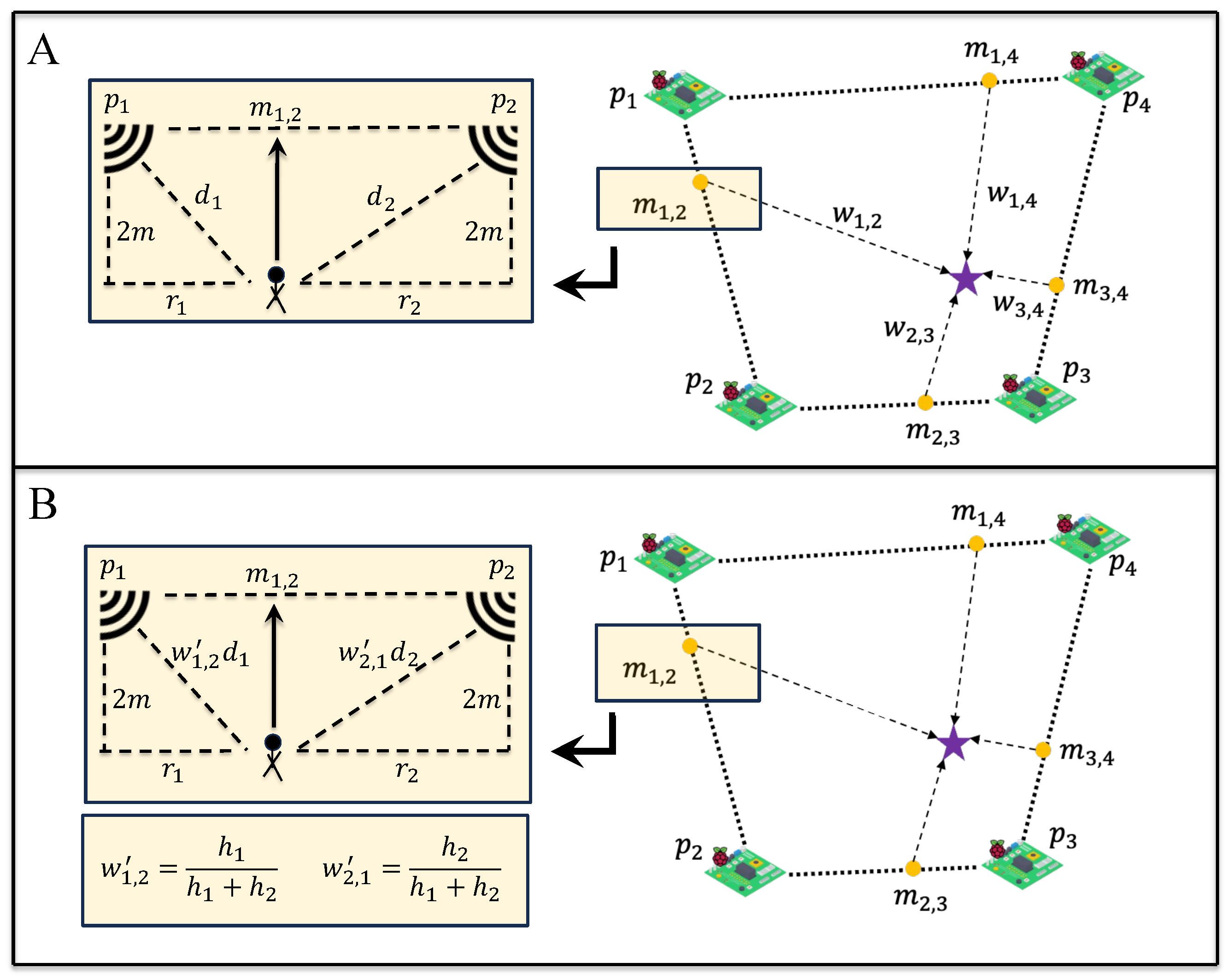
3.1. Indoor Localization Using Graph Trilateration
3.1.1. Node Property
3.1.2. RHSI-Agg Trilateration
3.1.3. RHSI-Edge Trilateration
3.1.4. Handling Corner Cases
- Within a given time window, t, when only a single edge computing device is detected, we assume the BLE beacon location to be directly beneath the edge computing device, regardless of RSSI, .
- When two edge computing devices are detected, we approximate the BLE beacon location as the edge-based localization, for from either RHSI-Agg or RHSI-Edge, accordingly.
3.1.5. Enhancing Temporal Consistency
4. Benchmark Data Collection
5. Evaluation Metrics
5.1. Evaluating Multi-Person Localization
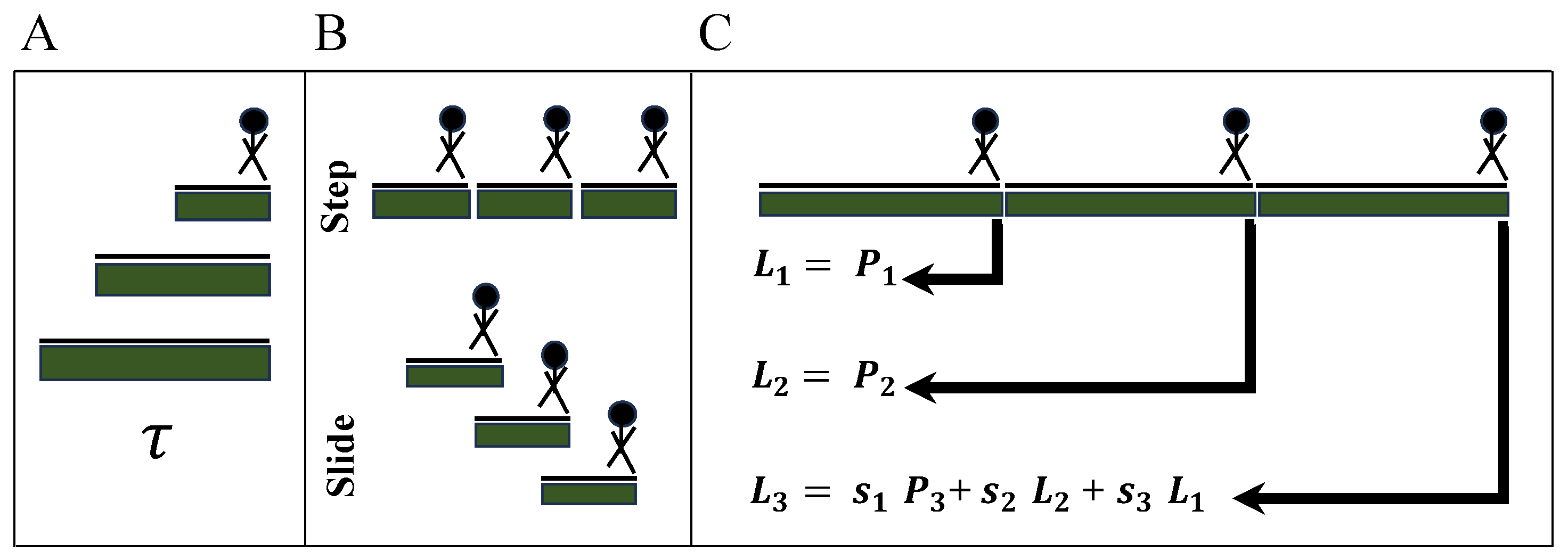
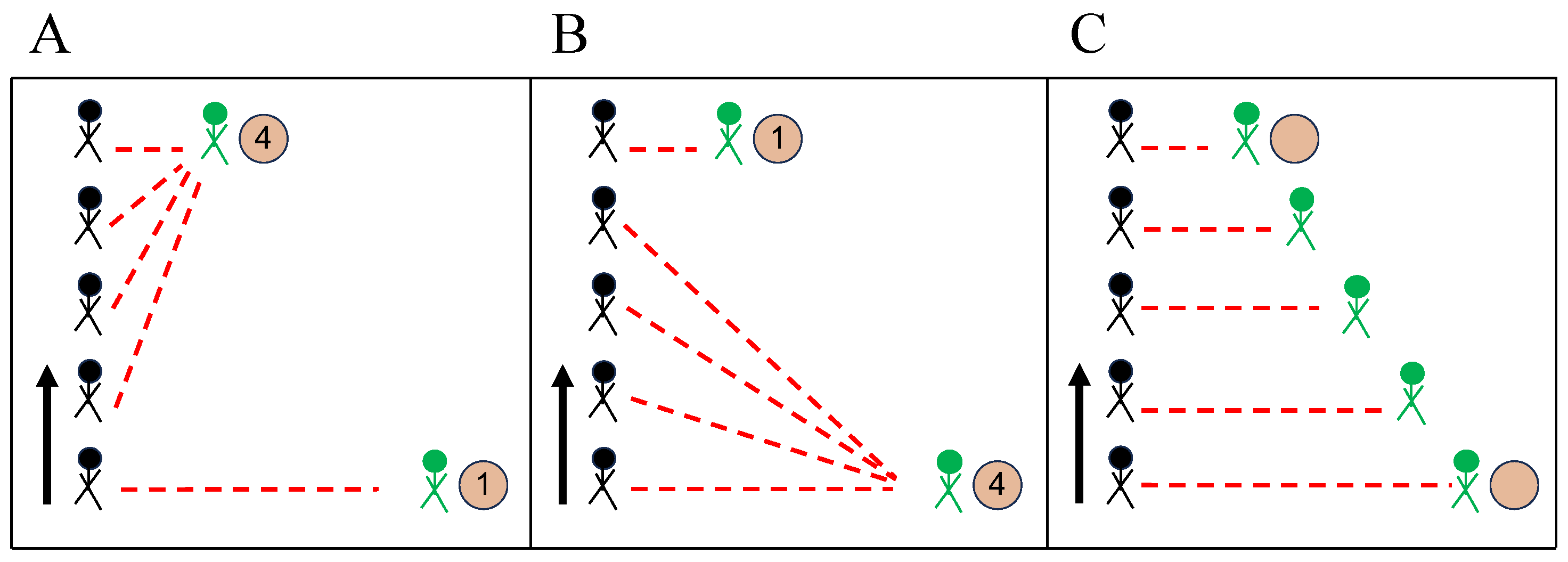
- Window Size (): The size of the time window considered for localization, varying between 0.5 to 60 s (Figure 2A).
- Slide/Step: Interval of sliding window in time (Figure 2B). For the sliding method, we used a 1-second sliding interval to ensure overlaps in sliding windows as short as = 2 sec. For the step method, we used the same size of the sliding interval with to avoid overlaps in windows. The sliding method provides more temporally smoothed BLE localization results due to overlapping temporal context in subsequent sliding windows.
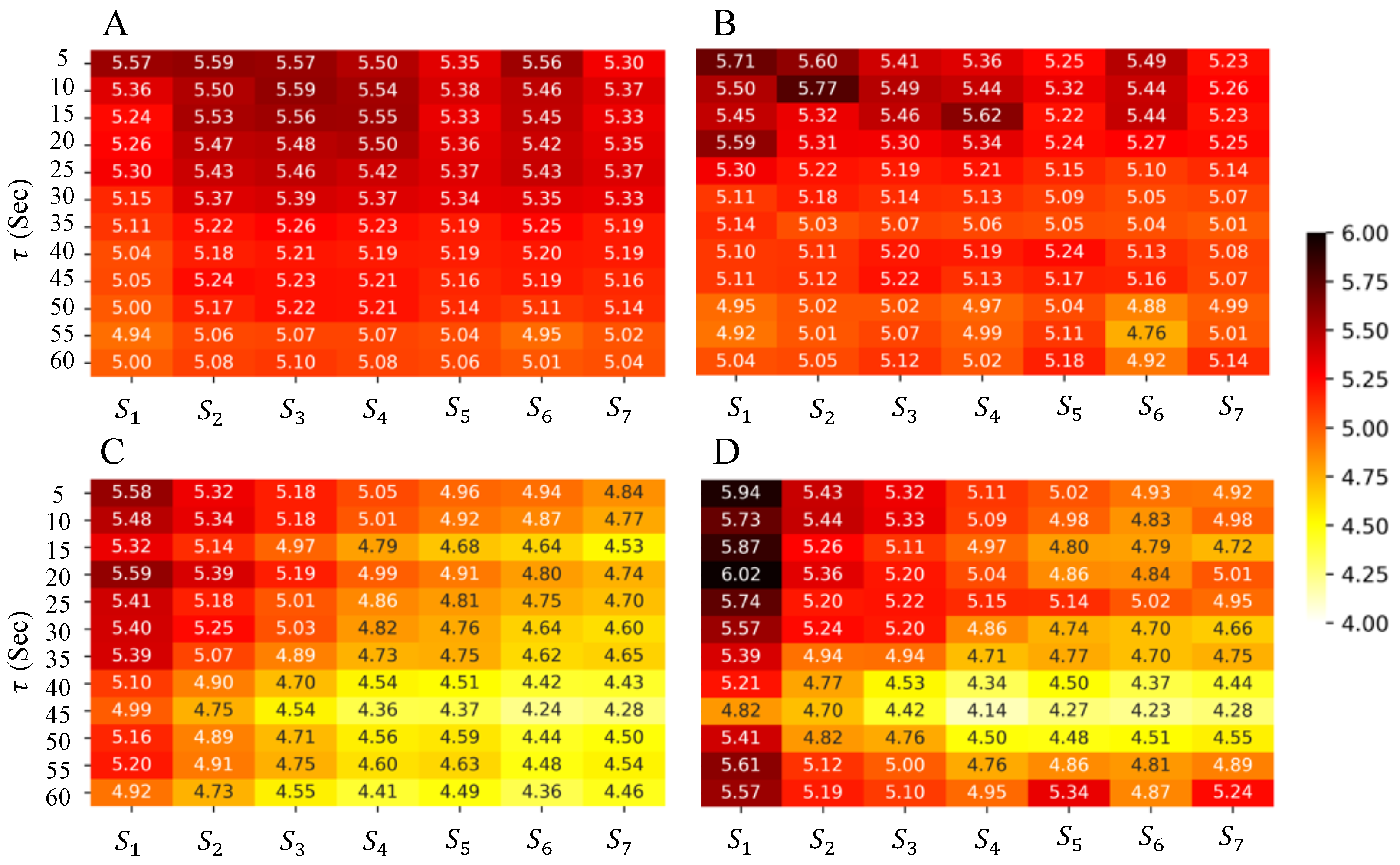
- Weighting Factors (S; Section 3.1.5): Temporal smoothing weights for T consecutive localizations (Figure 2C). We explored seven weighting factors (i.e., ), where each weighting factor is a vector with three elements (e.g., ) for , indicating the degree of dependency from past locations. We set to have more dependency on the temporally further with increasing ().
5.2. Baseline Method: Standard Trilateration
6. Results
7. Discussion
7.1. Indoor Localization Performance
7.2. Impact of Hyperparameters
7.3. Impact of Edge Device Distribution
7.4. Limitations and Future Works
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ghosh, A.; Puthusseryppady, V.; Chan, D.; Mascolo, C.; Hornberger, M. Machine learning detects altered spatial navigation features in outdoor behaviour of Alzheimer’s disease patients. Sci. Rep. 2022, 12, 3160. [Google Scholar] [CrossRef]
- Vuong, N.K.; Chan, S.; Lau, C.T. Automated Detection of Wandering Patterns in People with Dementia. Gerontechnology 2014, 12, 127–147. [Google Scholar] [CrossRef]
- Cheol Jeong, I.; Bychkov, D.; Hiser, S.; Kreif, J.D.; Klein, L.M.; Hoyer, E.H.; Searson, P.C. Using a real-time location system for assessment of patient ambulation in a hospital setting. Arch. Phys. Med. Rehabil. 2017, 98, 1366–1373. [Google Scholar] [CrossRef] [PubMed]
- Van Haute, T.; De Poorter, E.; Crombez, P.; Lemic, F.; Handziski, V.; Wirström, N.; Wolisz, A.; Voigt, T.; Moerman, I. Performance analysis of multiple Indoor Positioning Systems in a healthcare environment. Int. J. Health Geogr. 2016, 15, 7. [Google Scholar] [CrossRef] [PubMed]
- Yoo, S.; Kim, S.; Kim, E.; Jung, E.; Lee, K.; Hwang, H. Real-time location system-based asset tracking in the healthcare field: Lessons learned from a feasibility study. BMC Med. Inform. Decis. Mak. 2018, 18, 80. [Google Scholar] [CrossRef]
- Bai, L.; Ciravegna, F.; Bond, R.; Mulvenna, M. A low cost indoor positioning system using bluetooth low energy. IEEE Access 2020, 8, 136858–136871. [Google Scholar] [CrossRef]
- Qureshi, U.M.; Umair, Z.; Hancke, G.P. Evaluating the implications of varying Bluetooth low energy (BLE) transmission power levels on wireless indoor localization accuracy and precision. Sensors 2019, 19, 3282. [Google Scholar] [CrossRef]
- Hadian, K.; Fernie, G.; Roshan Fekr, A. Development and Evaluation of BLE-Based Room-Level Localization to Improve Hand Hygiene Performance Estimation. J. Healthc. Eng. 2023, 2023, 4258362. [Google Scholar] [CrossRef]
- Newman, N. Apple iBeacon technology briefing. J. Direct Data Digit. Mark. Pract. 2014, 15, 222–225. [Google Scholar] [CrossRef]
- Townsend, K.; Cufí, C.; Wang, C.; Davidson, R. Getting Started with Bluetooth Low Energy: Tools and Techniques for Low-Power Networking; O’Reilly Media, Inc.: Sebastopol, CA, USA, 2014. [Google Scholar]
- Li, M.; Zhao, L.; Tan, D.; Tong, X. BLE fingerprint indoor localization algorithm based on eight-neighborhood template matching. Sensors 2019, 19, 4859. [Google Scholar] [CrossRef]
- Riady, A.; Kusuma, G.P. Indoor positioning system using hybrid method of fingerprinting and pedestrian dead reckoning. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 7101–7110. [Google Scholar] [CrossRef]
- Wang, X.; Gao, L.; Mao, S.; Pandey, S. CSI-based fingerprinting for indoor localization: A deep learning approach. IEEE Trans. Veh. Technol. 2016, 66, 763–776. [Google Scholar] [CrossRef]
- Luo, R.C.; Hsiao, T.J. Indoor localization system based on hybrid Wi-Fi/BLE and hierarchical topological fingerprinting approach. IEEE Trans. Veh. Technol. 2019, 68, 10791–10806. [Google Scholar] [CrossRef]
- Bargh, M.S.; de Groote, R. Indoor localization based on response rate of bluetooth inquiries. In Proceedings of the First ACM International Workshop on Mobile Entity Localization and Tracking in GPS-Less Environments, San Francisco, CA, USA, 19 September 2008; pp. 49–54. [Google Scholar]
- Kriz, P.; Maly, F.; Kozel, T. Improving indoor localization using bluetooth low energy beacons. Mob. Inf. Syst. 2016, 2016, 2083094. [Google Scholar] [CrossRef]
- Chen, L.; Kuusniemi, H.; Chen, Y.; Liu, J.; Pei, L.; Ruotsalainen, L.; Chen, R. Constraint Kalman filter for indoor bluetooth localization. In Proceedings of the 2015 23rd European Signal Processing Conference (EUSIPCO), Nice, France, 31 August–4 September 2015; pp. 1915–1919. [Google Scholar]
- Spachos, P.; Papapanagiotou, I.; Plataniotis, K.N. Microlocation for smart buildings in the era of the internet of things: A survey of technologies, techniques, and approaches. IEEE Signal Process. Mag. 2018, 35, 140–152. [Google Scholar] [CrossRef]
- Zafari, F.; Papapanagiotou, I.; Christidis, K. Microlocation for internet-of-things-equipped smart buildings. IEEE Internet Things J. 2015, 3, 96–112. [Google Scholar] [CrossRef]
- Basri, C.; El Khadimi, A. Survey on indoor localization system and recent advances of WIFI fingerprinting technique. In Proceedings of the 2016 5th International Conference on Multimedia Computing and Systems (ICMCS), Marrakech, Morocco, 29 September–1 October 2016; pp. 253–259. [Google Scholar]
- Atashi, M.; Malekzadeh, P.; Salimibeni, M.; Hajiakhondi-Meybodi, Z.; Plataniotis, K.N.; Mohammadi, A. Orientation-matched multiple modeling for RSSI-based indoor localization via BLE sensors. In Proceedings of the 2020 28th European Signal Processing Conference (EUSIPCO), Amsterdam, The Netherlands, 18–21 January 2021; pp. 1702–1706. [Google Scholar]
- Ramadhan, H.; Yustiawan, Y.; Kwon, J. Applying movement constraints to BLE RSSI-based indoor positioning for extracting valid semantic trajectories. Sensors 2020, 20, 527. [Google Scholar] [CrossRef] [PubMed]
- Chai, X.; Yang, Q. Reducing the calibration effort for probabilistic indoor location estimation. IEEE Trans. Mob. Comput. 2007, 6, 649–662. [Google Scholar] [CrossRef]
- Guzmán-Quirós, R.; Martínez-Sala, A.; Gómez-Tornero, J.L.; García-Haro, J. Integration of directional antennas in an RSS fingerprinting-based indoor localization system. Sensors 2015, 16, 4. [Google Scholar] [CrossRef]
- Maus, G.; Kuxdorf-Alkirata, N.; Brückmann, D.; Gemci, M. A low-cost BLE based sensor platform for efficient Received Signal Strength monitoring. In Proceedings of the 2019 IEEE 62nd International Midwest Symposium on Circuits and Systems (MWSCAS), Dallas, TX, USA, 4–7 August 2019; pp. 1199–1202. [Google Scholar]
- Taşkan, A.K.; Alemdar, H. Obstruction-Aware Signal-Loss-Tolerant Indoor Positioning Using Bluetooth Low Energy. Sensors 2021, 21, 971. [Google Scholar] [CrossRef]
- Eason, G.; Noble, B.; Sneddon, I.N. On certain integrals of Lipschitz-Hankel type involving products of Bessel functions. PHilosophical Trans. R. Soc. London. Ser. Math. Phys. Sci. 1955, 247, 529–551. [Google Scholar]
- Sadowski, S.; Spachos, P. Rssi-based indoor localization with the internet of things. IEEE Access 2018, 6, 30149–30161. [Google Scholar] [CrossRef]
- Suresha, P.B.; Hegde, C.; Jiang, Z.; Clifford, G.D. An Edge Computing and Ambient Data Capture System for Clinical and Home Environments. Sensors 2022, 22, 2511. [Google Scholar] [CrossRef] [PubMed]
- Kwon, H.; Hedge, C.; Kiarashi, Y.; Madala, V.S.K.; Singh, R.; Nakum, A.; Tweedy, R.; Tonetto, L.M.; Zimring, C.M.; Clifford, G.D. Indoor Localization and Multi-person Tracking Using Privacy Preserving Distributed Camera Network with Edge Computing. arXiv 2023, arXiv:2305.05062. [Google Scholar]
- Blidh, H. Bleak. 2022. Available online: https://bleak.readthedocs.io/en/latest/ (accessed on 21 November 2022).
- Wang, Y.; Yang, X.; Zhao, Y.; Liu, Y.; Cuthbert, L. Bluetooth positioning using RSSI and triangulation methods. In Proceedings of the 2013 IEEE 10th Consumer Communications and Networking Conference (CCNC), Las Vegas, NV, USA, 11–14 January 2013; pp. 837–842. [Google Scholar]
- Hajiakhondi-Meybodi, Z.; Salimibeni, M.; Plataniotis, K.N.; Mohammadi, A. Bluetooth low energy-based angle of arrival estimation via switch antenna array for indoor localization. In Proceedings of the 2020 IEEE 23rd International Conference on Information Fusion (FUSION), Virtual, 6–9 July 2020; pp. 1–6. [Google Scholar]
- Kolakowski, M. Kalman filter based localization in hybrid BLE-UWB positioning system. In Proceedings of the 2017 IEEE International Conference on RFID Technology & Application (RFID-TA), Cagliari, Italy, 12–14 September 2017; pp. 290–293. [Google Scholar]
- Gang, H.S.; Pyun, J.Y. A smartphone indoor positioning system using hybrid localization technology. Energies 2019, 12, 3702. [Google Scholar] [CrossRef]
- Naheem, K.; Kim, M.S. A low-cost foot-placed UWB and IMU fusion-based indoor pedestrian tracking system for IoT applications. Sensors 2022, 22, 8160. [Google Scholar] [CrossRef]
- Ye, F.; Chen, R.; Guo, G.; Peng, X.; Liu, Z.; Huang, L. A low-cost single-anchor solution for indoor positioning using BLE and inertial sensor data. IEEE Access 2019, 7, 162439–162453. [Google Scholar] [CrossRef]
- Khodabandehloo, E.; Riboni, D. Collaborative trajectory mining in smart-homes to support early diagnosis of cognitive decline. IEEE Trans. Emerg. Top. Comput. 2020, 9, 1194–1205. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | RHSI Applied | Time Window Strategy | Error ± STD (m) |
|---|---|---|---|
| Standard Trilateration | N/A | Slide | |
| N/A | Step | ||
| Graph (w/o Interpolation) | RHSI-Agg | Slide | |
| RHSI-Agg | Step | ||
| RHSI-Edge | Slide | ||
| RHSI-Edge | Step | ||
| Graph (with Interpolation) | RHSI-Agg | Slide | |
| RHSI-Agg | Step | ||
| RHSI-Edge | Slide | ||
| RHSI-Edge | Step |
| Right | Left | Activity | ||||
|---|---|---|---|---|---|---|
| Method | Corridor | Corridor | Kitchen | Lounge | Area | Average |
| Number of edge devices | ||||||
| 6 | 4 | 5 | 3 | 7 | ||
| Region size (m) | ||||||
| 50 | 66 | 70 | 176 | 312 | ||
| Positioning Error (m) | ||||||
| Standard Trilateration | 6.43 | 4.11 | 5.99 | 7.27 | 8.18 | 6.39 |
| Graph (w/o Interpolation) | 4.81 | 2.51 | 3.78 | 4.93 | 6.15 | 4.44 |
| Graph (with Interpolation) | 4.62 | 3.91 | 3.99 | 3.76 | 6.56 | 4.57 |
| Room Level Localization Accuracy (%) | ||||||
| Standard Trilateration | 47.98 | 77.06 | 73.97 | 54.39 | 63.98 | 65.74 |
| Graph (w/o Interpolation) | 94.44 | 97.53 | 78.57 | 66.66 | 83.33 | 84.11 |
| Graph (with Interpolation) | 93.82 | 96.29 | 77.77 | 66.67 | 91.38 | 85.19 |
| Signal Modality | Right Corridor | Left Corridor | Kitchen | Lounge | Activity Area | Average |
|---|---|---|---|---|---|---|
| BLE Positioning Error (m) | 5.01 | 2.94 | 3.13 | 4.68 | 4.11 | 3.97 |
| BLE and IMU Positioning Error (m) | 4.31 | 3.43 | 2.57 | 4.71 | 3.21 | 3.65 |
| BLE Room Level Accuracy (%) | 88.1 | 91.4 | 92.7 | 89.2 | 90.2 | 90.3 |
| BLE and IMU Room Level Accuracy(%) | 90.7 | 90.6 | 93 | 90.4 | 91.6 | 91.2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kiarashi, Y.; Saghafi, S.; Das, B.; Hegde, C.; Madala, V.S.K.; Nakum, A.; Singh, R.; Tweedy, R.; Doiron, M.; Rodriguez, A.D.; et al. Graph Trilateration for Indoor Localization in Sparsely Distributed Edge Computing Devices in Complex Environments Using Bluetooth Technology. Sensors 2023, 23, 9517. https://doi.org/10.3390/s23239517
Kiarashi Y, Saghafi S, Das B, Hegde C, Madala VSK, Nakum A, Singh R, Tweedy R, Doiron M, Rodriguez AD, et al. Graph Trilateration for Indoor Localization in Sparsely Distributed Edge Computing Devices in Complex Environments Using Bluetooth Technology. Sensors. 2023; 23(23):9517. https://doi.org/10.3390/s23239517
Chicago/Turabian StyleKiarashi, Yashar, Soheil Saghafi, Barun Das, Chaitra Hegde, Venkata Siva Krishna Madala, ArjunSinh Nakum, Ratan Singh, Robert Tweedy, Matthew Doiron, Amy D. Rodriguez, and et al. 2023. "Graph Trilateration for Indoor Localization in Sparsely Distributed Edge Computing Devices in Complex Environments Using Bluetooth Technology" Sensors 23, no. 23: 9517. https://doi.org/10.3390/s23239517
APA StyleKiarashi, Y., Saghafi, S., Das, B., Hegde, C., Madala, V. S. K., Nakum, A., Singh, R., Tweedy, R., Doiron, M., Rodriguez, A. D., Levey, A. I., Clifford, G. D., & Kwon, H. (2023). Graph Trilateration for Indoor Localization in Sparsely Distributed Edge Computing Devices in Complex Environments Using Bluetooth Technology. Sensors, 23(23), 9517. https://doi.org/10.3390/s23239517