
Enhanced Detection Precision of the Taiji Program by Frequency Setting Strategy Based on a Hierarchical Optimization Algorithm


Abstract
:1. Introduction
2. Frequency Factors and Constraints
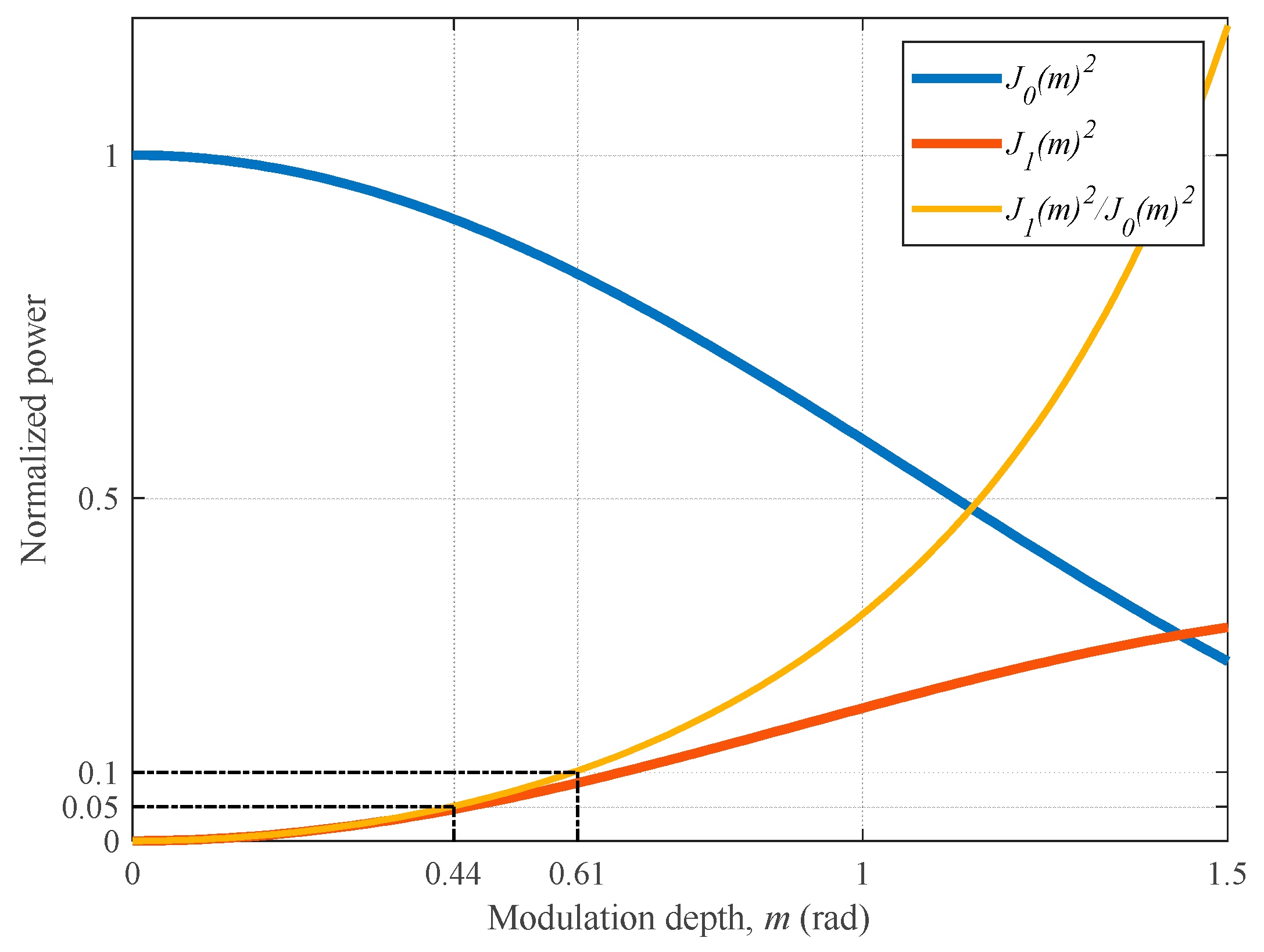
2.1. Readout Displacement Noise and Sideband Frequency Constraints
2.2. Constraints of the ADC Sampling and Pilot-Tone Frequencies with the Beat-Note Frequency
3. Hierarchical Optimization Algorithm
3.1. Optimization Model
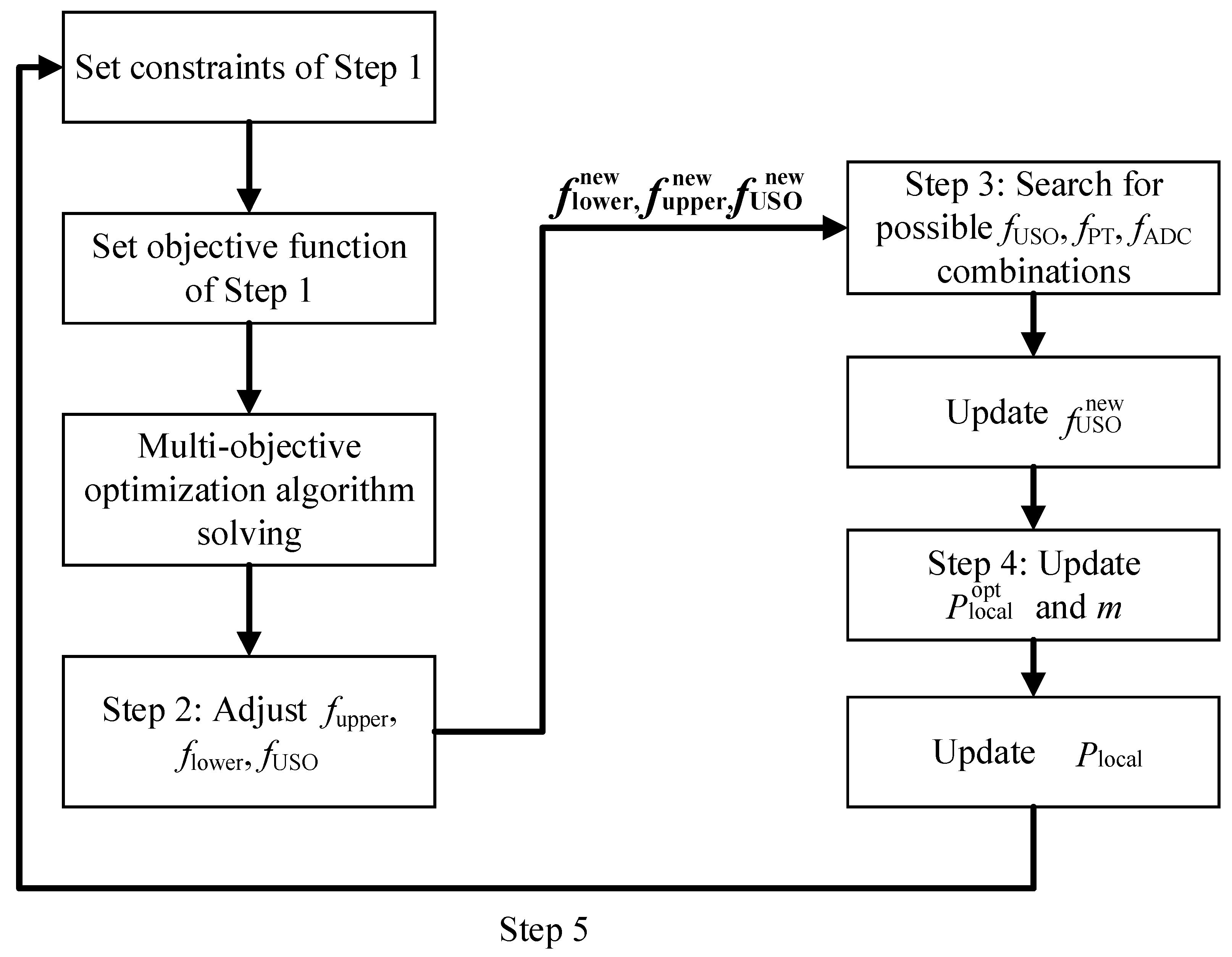
3.2. Optimization Process
4. Results and Discussion
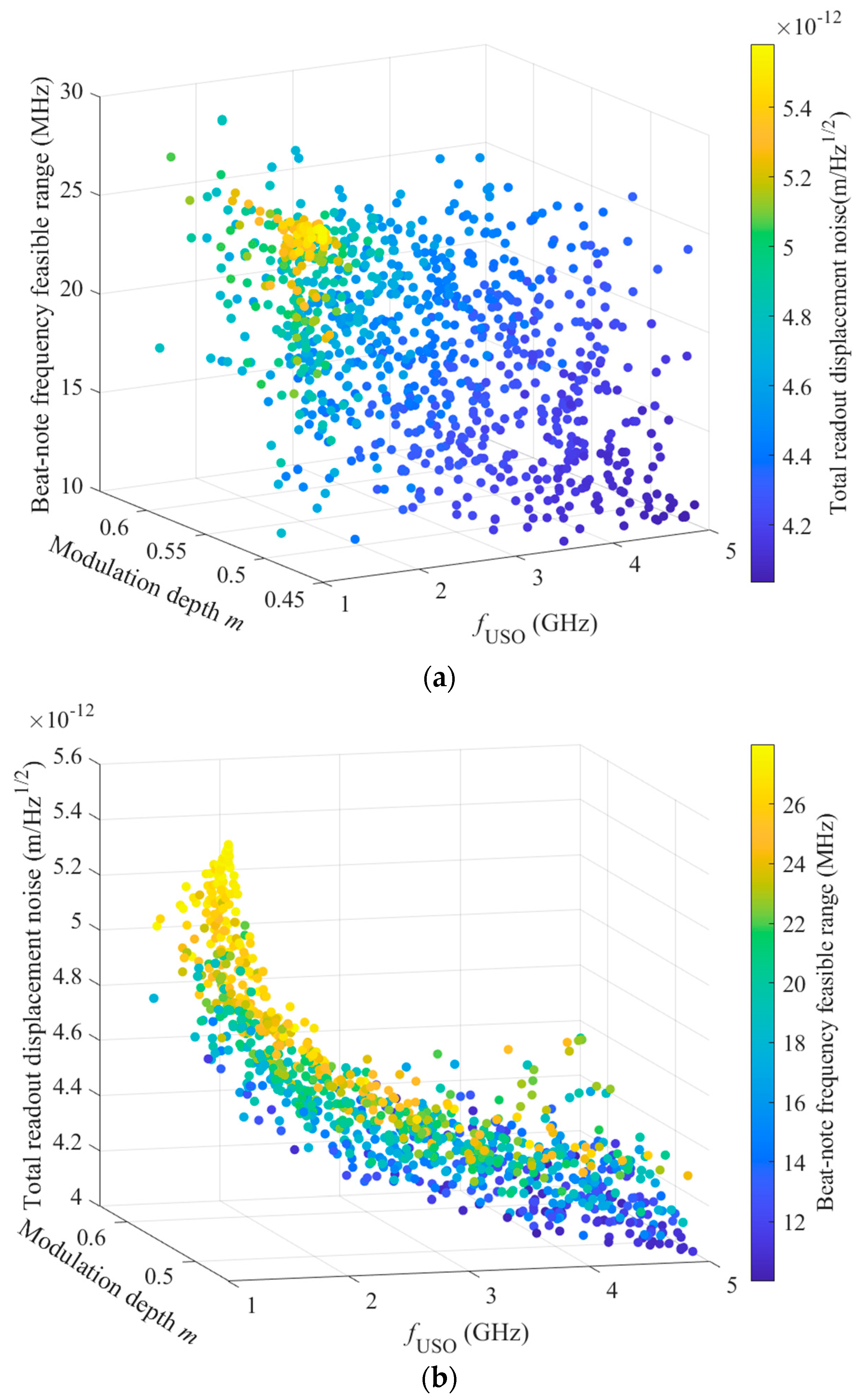
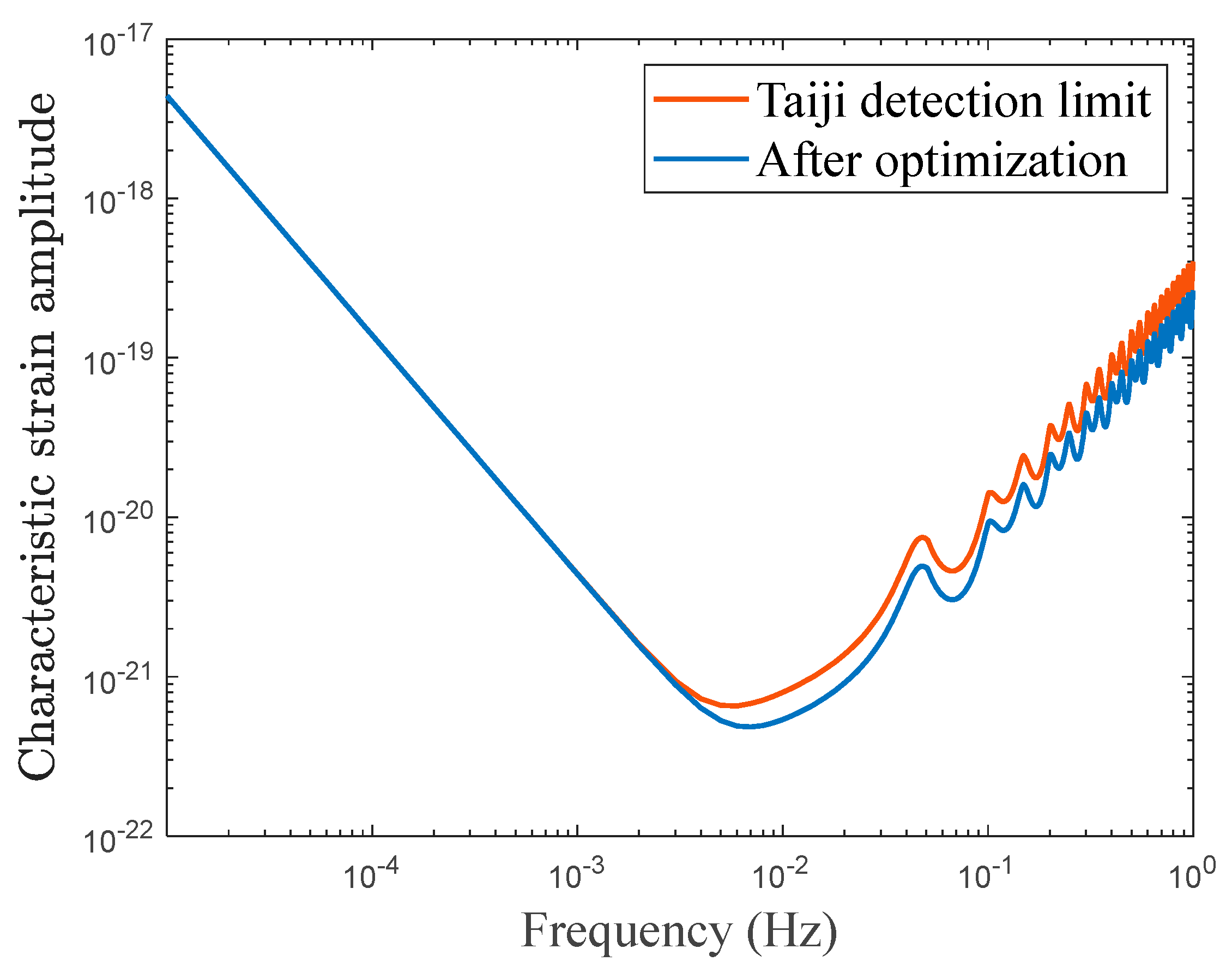
4.1. Optimization Results
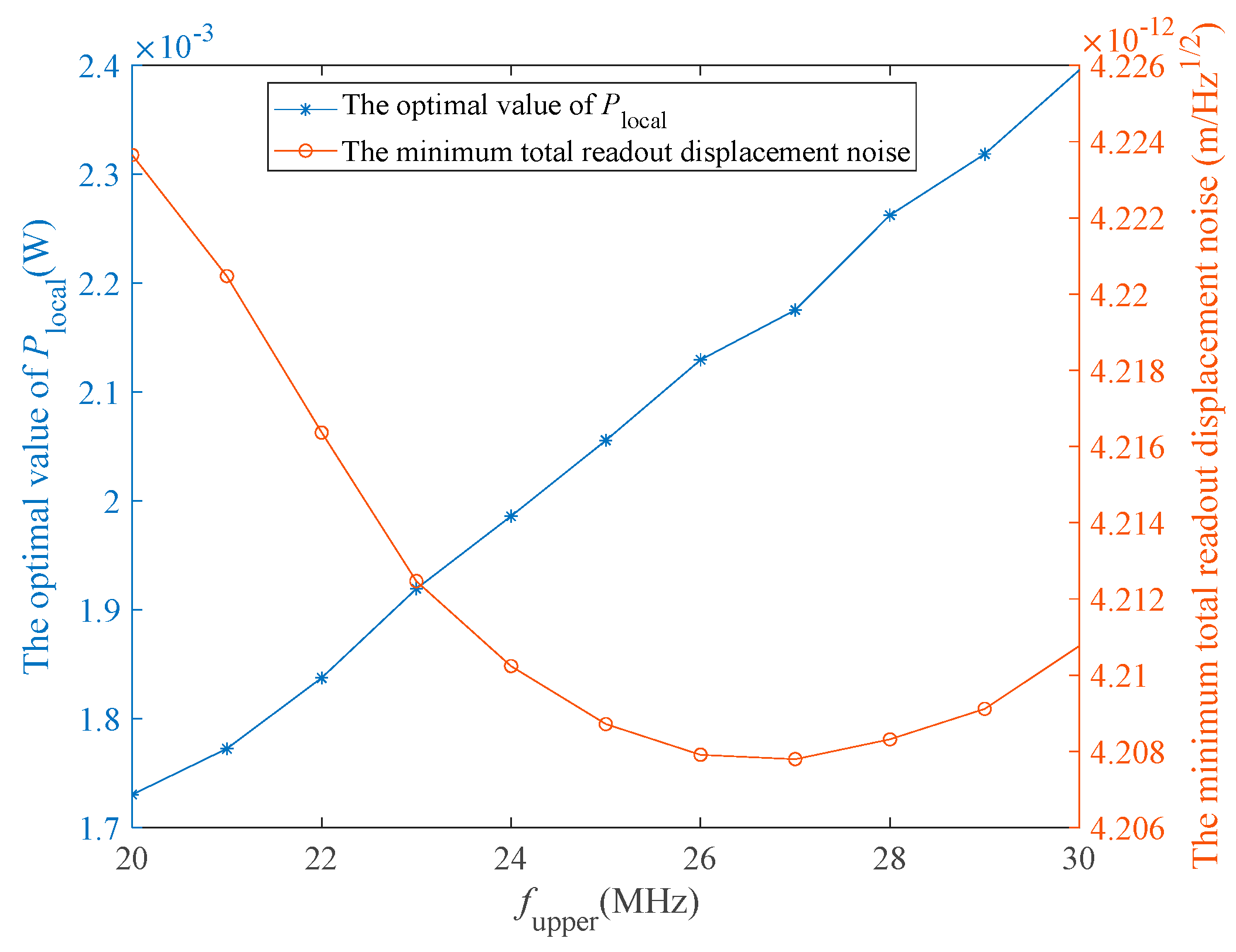
4.2. Experimental Adjustment of Ptel and fupper
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Abramovici, A.; Althouse, W.E.; Drever, R.W.; Gürsel, Y.; Kawamura, S.; Raab, F.J.; Shoemaker, D.; Sievers, L.; Spero, R.E.; Thorne, K.S. LIGO: The Laser Interferometer Gravitational-Wave Observatory. Science 1992, 256, 325–333. [Google Scholar] [CrossRef] [PubMed]
- Thorne, K.S. Gravitational Waves. arXiv 1995, arXiv:gr-qc/9506086. [Google Scholar]
- Hough, J.; Robertson, D.; Ward, H.; McNamara, P. LISA—The Interferometer. Adv. Space Res. 2003, 32, 1247–1250. [Google Scholar] [CrossRef]
- Danzmann, K.; Prince, T.A.; Binetruy, P.; Bender, P.; Buchman, S.; Centrella, J.; Cerdonio, M.; Cornish, N.; Cruise, M.; Cutler, C.J. LISA: Unveiling a Hidden Universe. In Assessment Study Report ESA/SRE; AEI: Hannover, Germany, 2011; Volume 3. [Google Scholar]
- Hu, W.; Wu, Y. The Taiji Program in Space for Gravitational Wave Physics and the Nature of Gravity. Natl. Sci. Rev. 2017, 4, 685–686. [Google Scholar] [CrossRef]
- Li, Y.; Jin, G. A Brief Overview of 8 m Prototype Facility of Laser Interferometer for Taiji Pathfinder Mission. Appl. Phys. B 2021, 127, 88. [Google Scholar] [CrossRef]
- Luo, Z.; Guo, Z.; Jin, G.; Wu, Y.; Hu, W. A Brief Analysis to Taiji: Science and Technology. Results Phys. 2020, 16, 102918. [Google Scholar] [CrossRef]
- Luo, J.; Chen, L.-S.; Duan, H.-Z.; Gong, Y.-G.; Hu, S.; Ji, J.; Liu, Q.; Mei, J.; Milyukov, V.; Sazhin, M.; et al. TianQin: A Space-Borne Gravitational Wave Detector. Class. Quantum Grav. 2016, 33, 035010. [Google Scholar] [CrossRef]
- Otto, M. Time-Delay Interferometry Simulations for the Laser Interferometer Space Antenna. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2015. [Google Scholar]
- Brause, N.C. Auxiliary Function Development for the LISA Metrology System. Ph.D. Thesis, Gotfried Wilhelm Leibniz Universitmt Hannover, Hannover, Germany, 2018. [Google Scholar]
- Chiow, S.; Williams, J.; Yu, N. Laser-Ranging Long-Baseline Differential Atom Interferometers for Space. Phys. Rev. A 2015, 92, 063613. [Google Scholar] [CrossRef]
- Wang, Y. On Inter-Satellite Laser Ranging, Clock Synchronization and Gravitational Wave Data Analysis. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2014. [Google Scholar]
- Barke, S. Inter-Spacecraft Frequency Distribution. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2015. [Google Scholar]
- Pollack, S.E.; Stebbins, R.T. A Demonstration of LISA Laser Communication. Class. Quantum Grav. 2006, 23, 4201–4213. [Google Scholar] [CrossRef]
- Kullmann, J. Development of a Digital Phase Measuring System with Microradian Precision for LISA. Ph.D. Thesis, Gottfried Wilhelm Leibniz Universität Hannover, Hannover, Germany, 2012. [Google Scholar]
- Zhang, J.; Yang, Z.; Ma, X.; Peng, X.; Liu, H.; Tang, W.; Zhao, M.; Gao, C.; Qiang, L.-E.; Han, X.; et al. Inter-Spacecraft Offset Frequency Setting Strategy in the Taiji Program. Appl. Opt. 2022, 61, 837–843. [Google Scholar] [CrossRef] [PubMed]
- Heinzel, G.; Esteban, J.J.; Barke, S.; Otto, M.; Wang, Y.; Garcia, A.F.; Danzmann, K. Auxiliary Functions of the LISA Laser Link: Ranging, Clock Noise Transfer and Data Communication. Class. Quantum Grav. 2011, 28, 094008. [Google Scholar] [CrossRef]
- Klipstein, W.; Halverson, P.G.; Peters, R.; Cruz, R.; Shaddock, D. Clock Noise Removal in LISA. In Proceedings of the Laser Interferometer Space Antenna: 6th International LISA Symposium, Greenbelt, MD, USA, 19–23 June 2006; Volume 873, pp. 312–318. [Google Scholar]
- Barke, S.; Brause, N.; Bykov, I.; Esteban Delgado, J.J.; Enggaard, A.; Gerberding, O.; Heinzel, G.; Kullmann, J.; Pedersen, S.M.; Rasmussen, T. LISA Metrology System—Final Report; AEI: Hannover, Germany, 2014. [Google Scholar]
- Li, Y.; Wang, C.; Wang, L.; Liu, H.; Jin, G. A Laser Interferometer Prototype with Pico-Meter Measurement Precision for Taiji Space Gravitational Wave Detection Missionin China. Microgravity Sci. Technol. 2020, 32, 331–338. [Google Scholar] [CrossRef]
- Ren, Z.; Jun, Z.; Jiqiao, L.; Dijun, C.; Yan, Y.; Weibiao, C. Solid State Tunable Single-Frequency Laser Based on Non-Planar Ring Oscillator. Chin. J. Lasers 2011, 38, 1102011. [Google Scholar] [CrossRef]
- Gao, R.; Liu, H.; Zhao, Y.; Luo, Z.; Jin, G. Automatic, High-Speed, High-Precision Acquisition Scheme with QPD for the Taiji Program. Opt. Express 2021, 29, 821. [Google Scholar] [CrossRef] [PubMed]
- Zhao, Y. The Research on the Tilt to Length Coupling Noise in Inter-Satellite Interference Link for the Space-Based Gravitational Wave Detection; Chinese Academy of Sciences: Beijing, China, 2021. [Google Scholar]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Luo, Z.; Wang, Y.; Wu, Y.; Hu, W.; Jin, G. The Taiji Program: A Concise Overview. Prog. Theor. Exp. Phys. 2021, 2021, 05A108. [Google Scholar] [CrossRef]
- Liu, H.; Li, Y.; Jin, G. Numerical Simulations of Arm-Locking for Taiji Space Gravitational Waves Detection. Microgravity Sci. Technol. 2021, 33, 41. [Google Scholar] [CrossRef]
- Wan, C. A Study on nW-Level Weak Light Optical Phase-Locking Techniques. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2012. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| Electron charge constant | e | 1.6 × 10−19 C |
| Heterodyne interference efficiency | 0.8 [20] | |
| Photodiode responsivity | Rpd | 0.68 A/W [20] |
| Relative intensity laser noise | RIN | 1 × 10−8 [21] |
| Photodetector phase number | Npd | 4 |
| Photodetector voltage noise | ||
| Photodiode capacitance | 10 pF | |
| Current noise | [22] | |
| Laser power transmitted through the telescope | 2 W [7] | |
| Total optical efficiency | 0.853 [23] | |
| Arm length | L | 3 × 109 m [6] |
| Diameter of telescope | D | 40 cm [7] |
| Steps | Algorithm | Time Consumption |
|---|---|---|
| Step 1 | Nondominated sorting genetic algorithm II [24] | 240 s |
| Step 2 | Round | 0.005 s |
| Step 3 | Exhaustive enumeration | 1 s |
| Step 4 | Optimization | 0.03 s |
| Number | flower (MHz) | fupper (MHz) | Feasible Range | fADC (MHz) | fPT (MHz) | fUSO (MHz) | m | () | Plocal ) |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 3 | 25 | 23 | 92 | 90 | 4140 | 0.44 | 4.21 | 2.06 |
| 2 | 3 | 25 | 23 | 63 | 61 | 3843 | 0.44 | 4.23 | 2.06 |
| 3 | 3 | 25 | 23 | 68 | 66 | 2244 | 0.48 | 4.47 | 2.06 |
| 4 | 3 | 25 | 23 | 62 | 60 | 1860 | 0.50 | 4.57 | 2.06 |
| 5 | 3 | 24 | 22 | 84 | 82 | 3444 | 0.44 | 4.24 | 1.99 |
| 6 | 4 | 25 | 22 | 71 | 68 | 4828 | 0.44 | 4.16 | 2.06 |
| 7 | 4 | 25 | 22 | 70 | 67 | 4690 | 0.44 | 4.17 | 2.06 |
| 8 | 3 | 24 | 22 | 65 | 63 | 4095 | 0.44 | 4.18 | 1.99 |
| 9 | 4 | 25 | 22 | 88 | 86 | 3784 | 0.44 | 4.24 | 2.06 |
| 10 | 4 | 25 | 22 | 59 | 57 | 3363 | 0.44 | 4.28 | 2.06 |
| 11 | 4 | 25 | 22 | 59 | 57 | 3363 | 0.44 | 4.28 | 2.06 |
| 12 | 4 | 25 | 22 | 70 | 68 | 2380 | 0.48 | 4.44 | 2.06 |
| 13 | 4 | 25 | 22 | 58 | 56 | 1624 | 0.52 | 4.65 | 2.06 |
| 14 | 3 | 23 | 21 | 96 | 94 | 4512 | 0.44 | 4.12 | 1.92 |
| 15 | 3 | 23 | 21 | 61 | 59 | 3599 | 0.44 | 4.19 | 1.92 |
| 16 | 4 | 24 | 21 | 65 | 62 | 4030 | 0.44 | 4.19 | 1.99 |
| 17 | 4 | 24 | 21 | 84 | 82 | 3444 | 0.44 | 4.24 | 1.99 |
| 18 | 4 | 24 | 21 | 88 | 86 | 3784 | 0.44 | 4.21 | 1.99 |
| 19 | 3 | 23 | 21 | 60 | 58 | 1740 | 0.50 | 4.52 | 1.92 |
| 20 | 5 | 25 | 21 | 59 | 57 | 3363 | 0.44 | 4.28 | 2.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, J.; Yang, Z.; Ma, X.; Peng, X.; Gao, C.; Zhao, M.; Tang, W. Enhanced Detection Precision of the Taiji Program by Frequency Setting Strategy Based on a Hierarchical Optimization Algorithm. Sensors 2023, 23, 9431. https://doi.org/10.3390/s23239431
Zhang J, Yang Z, Ma X, Peng X, Gao C, Zhao M, Tang W. Enhanced Detection Precision of the Taiji Program by Frequency Setting Strategy Based on a Hierarchical Optimization Algorithm. Sensors. 2023; 23(23):9431. https://doi.org/10.3390/s23239431
Chicago/Turabian StyleZhang, Jiafeng, Zhen Yang, Xiaoshan Ma, Xiaodong Peng, Chen Gao, Mengyuan Zhao, and Wenlin Tang. 2023. "Enhanced Detection Precision of the Taiji Program by Frequency Setting Strategy Based on a Hierarchical Optimization Algorithm" Sensors 23, no. 23: 9431. https://doi.org/10.3390/s23239431
APA StyleZhang, J., Yang, Z., Ma, X., Peng, X., Gao, C., Zhao, M., & Tang, W. (2023). Enhanced Detection Precision of the Taiji Program by Frequency Setting Strategy Based on a Hierarchical Optimization Algorithm. Sensors, 23(23), 9431. https://doi.org/10.3390/s23239431