
Enhancement in Capacitance of Ionic Type of EAP-Based Strain Sensors



Abstract
:1. Introduction
- Sensitivity and accuracy: A high capacitance means that the sensor can store more charge per unit voltage and, therefore, may be more responsive to small changes in strain. This increased responsiveness can indeed enable the sensor to detect subtle movements with greater accuracy, and consequently, the sensitivity of the sensor might also be improved.
- Wide Range of Applications: The enhanced capacitance in EAP strain sensors broadens their potential applications by enabling increased sensitivity, accuracy, and the ability to capture different types and levels of strains. This makes them versatile tools for a wide spectrum of industries and fields, from healthcare to aerospace, robotics, etc.
- Improved Signal-to-Noise Ratio: Higher capacitance results in a stronger signal relative to background noise. This means that the sensor can differentiate between the actual physiological signals and any interference or noise, leading to more reliable and trustworthy measurements.
- Miniaturization of Sensor Components: As capacitance is directly related to the geometry and dielectric properties of the material, an increase in capacitance can enable the design of smaller sensor components without compromising sensitivity. This is particularly important in the miniaturization of electronic devices, where space is often a critical factor.
- Reduced Interference: In real-world environments, sensors can be exposed to various types of electromagnetic interference. Higher capacitance can make the sensor less susceptible to such interference, resulting in more reliable and accurate readings.
- Increase the ionic mobility: Doping can enhance the mobility of ions within the EAP material. This means that the ions can move more freely in response to an applied electric field. As a result, the material can respond more effectively, leading to higher capacitance.
- Reduce internal resistance: Doping can lower the internal resistance of the EAP material. This is crucial because a lower resistance allows more of the applied voltage to be utilized for inducing ion movement, rather than being lost as heat. With reduced resistive losses, the material can store more charge, resulting in increased capacitance.
- Improve dielectric properties: Doping can modify the dielectric properties of the EAP material, such as its permittivity. Materials with higher permittivity have a greater ability to store electric charge. Consequently, doping can lead to an increased capacity for charge storage and higher capacitance.
- Enhance surface charge density: Doping can lead to an increase in the surface charge density of the EAP material. This means that more charge can be stored at the material’s surface. Since capacitance is directly related to the amount of charge stored, this increase in surface charge density results in higher capacitance.
- Optimize ionic band structure: Doping can modify the ionic band structure of the EAP material. This impacts the energy levels available for electron movement, which, in turn, affects the material’s capacity to store charge. By tuning the band structure, doping can lead to improved charge storage and higher capacitance.
- Improve electrical conductivity: Doping can enhance the electrical conductivity of the EAP material. This improved conductivity facilitates a more efficient distribution of charge within the material, leading to higher capacitance.
- Controlled defects and dislocations: Doping can influence the presence and distribution of defects and dislocations in the crystal lattice of the EAP. These structural features can impact the material’s electronic properties and, consequently, its capacitance.
2. Experimental Section
2.1. Materials
2.2. Sensor Fabrication Process
2.2.1. DBSA-Doped Polyaniline Salt Yielding Procedure
- Solution A—In a double jacket reaction vessel fitted cooling circulator and magnetic stirrer, add distilled Aniline (1.9 gm; 20 mmol), DBSA (6.8 gm; 30 mmol), and 50 mL solvent (Ethanol 30 mL and 20 mL distilled water solution).
- Cool solution A at −5 °C and stir the solution for 30 min
- Solution B—In another conical flask, dissolve Ammonium Peroxodisulfate (5.7 gm; 25 mmol) in 50 mL distilled water.
- Add solution B into Solution A under continuous cooling and stirring; continue the polymerization reaction for about 6 h under this condition
- Filter the polymer as a green precipitate at Buchner and wash with ample distilled water and methanol mixture; after drying, DBSA-doped polyaniline salt is ready for further use.
2.2.2. Steps Involved in the Fabrication Process of Composite Film
- Polystyrene-block-poly(ethylene-ranbutylene)-block-polystyrene-graft-maleic anhydride (SEBS-g-MA) and toluene are combined. The mixture is stirred at 1500 revolutions per minute (rpm) at 90 °C for 90 min. Keep the solution as it is at room temperature for 30 min.
- DBSA-doped Polyaniline solution (20%) is added to the SEBS rubber solution
- The solution is stirred again at 1500 rpm at 90 °C for 90 min (can be up to 2 h accordingly) and kept for 30 min at room temperature to ensure thorough mixing and uniform distribution of components.
- The prepared solution is poured into a glass Petri dish in the desired shape at 90 °C for two hours (can be up to 3 h accordingly). The Petri dish is then left in an open environment at room temperature until the film cools down.
- The resulting composite film is taken out and carbon grease is applied to both sides of the film. Carbon conducting tape is affixed to both sides to make the electrical connections.
2.2.3. Schematic Diagram Representation of the Fabrication Process of the DBSA-Doped Sensor
2.2.4. SEM Characteristics
2.2.5. Block Diagram Representation of Three-Layer Sensor and DBSA-Doped Film
2.3. Capacitance Measurement
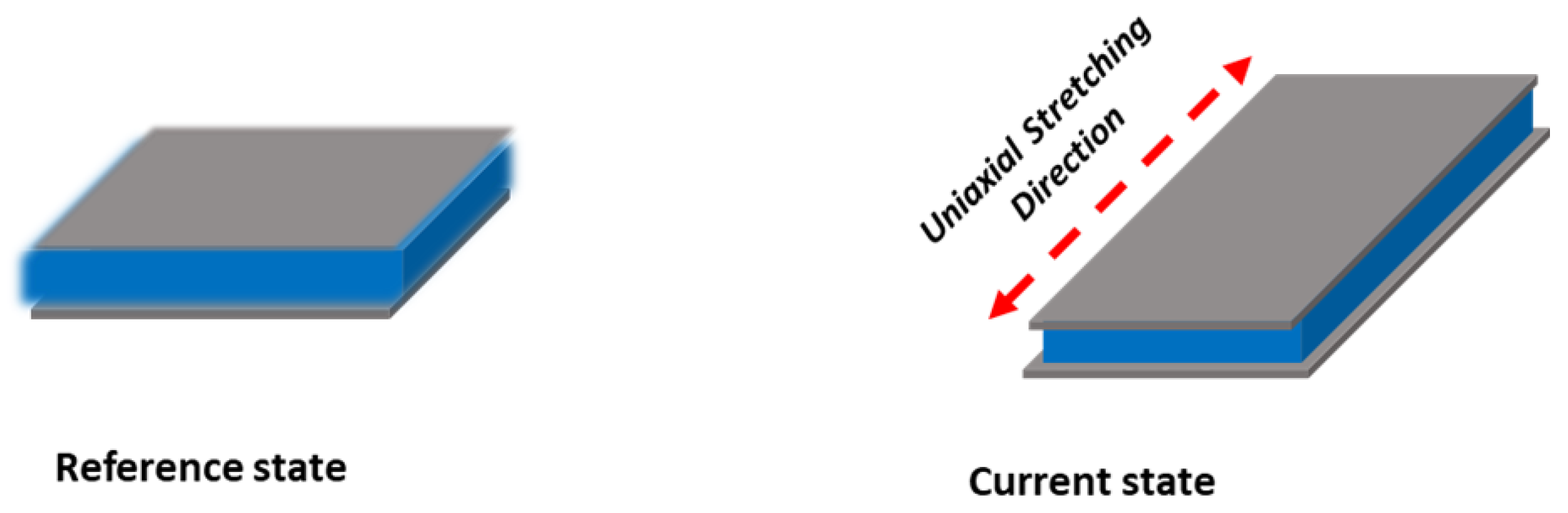
2.4. Tensile Testing Measurements
- is stress;
- is strain;
- is change in length;
- L is the initial length;
- is the extension coefficient;
- A is a cross-sectional area;
- w is the width of the specimen;
- t is the thickness of the sensor.
2.5. Sheet Resistivity Measurement
3. Results and Discussion
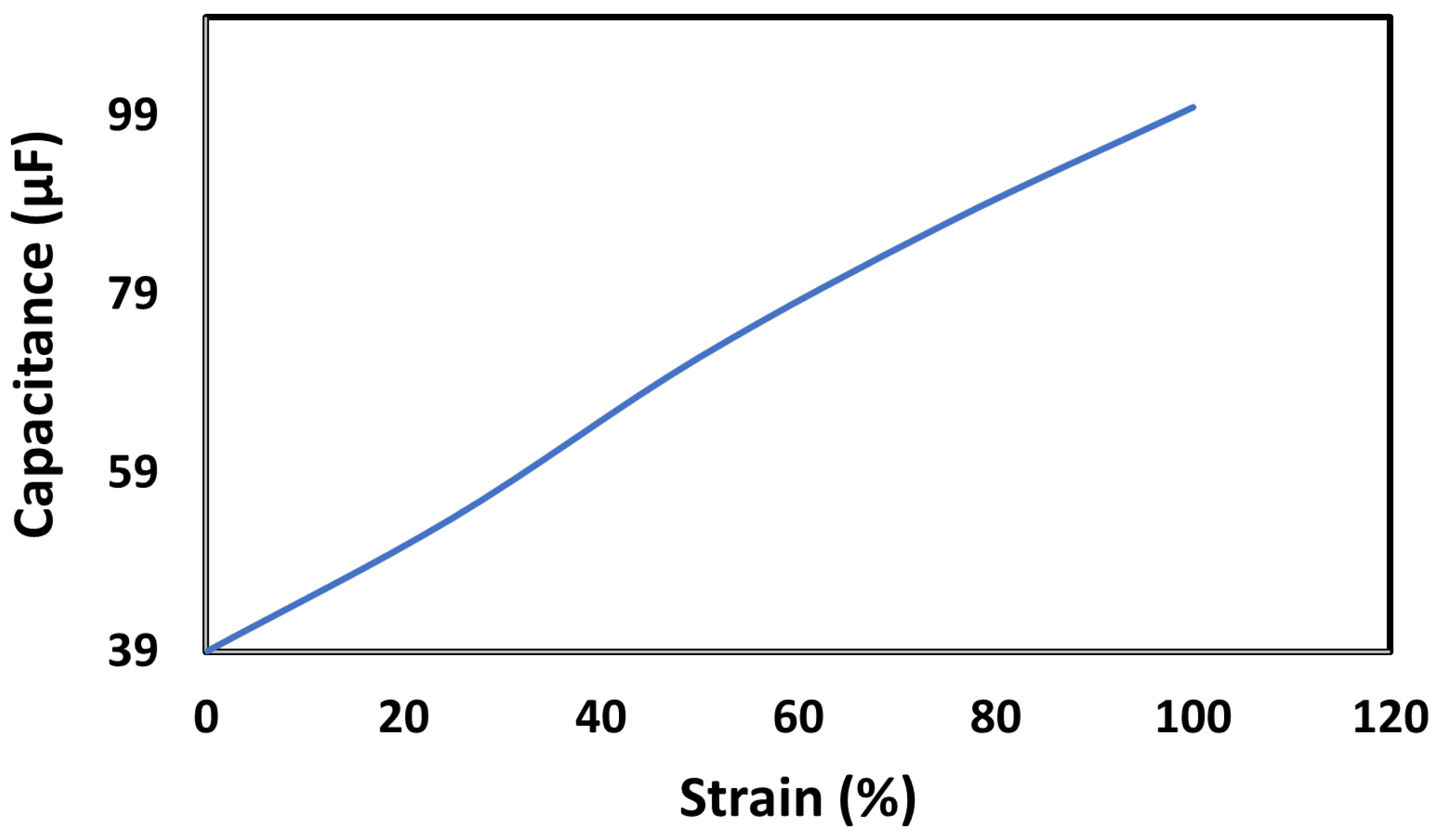
3.1. Electrical Characterization
- is the dielectric constant;
- is the permittivity of free space;
- A is the active polymer area;
- t is the thickness of the dielectric film.
- is change in capacitance;
- is the initial capacitance;
- is strain.
3.2. Mechanical Characterization
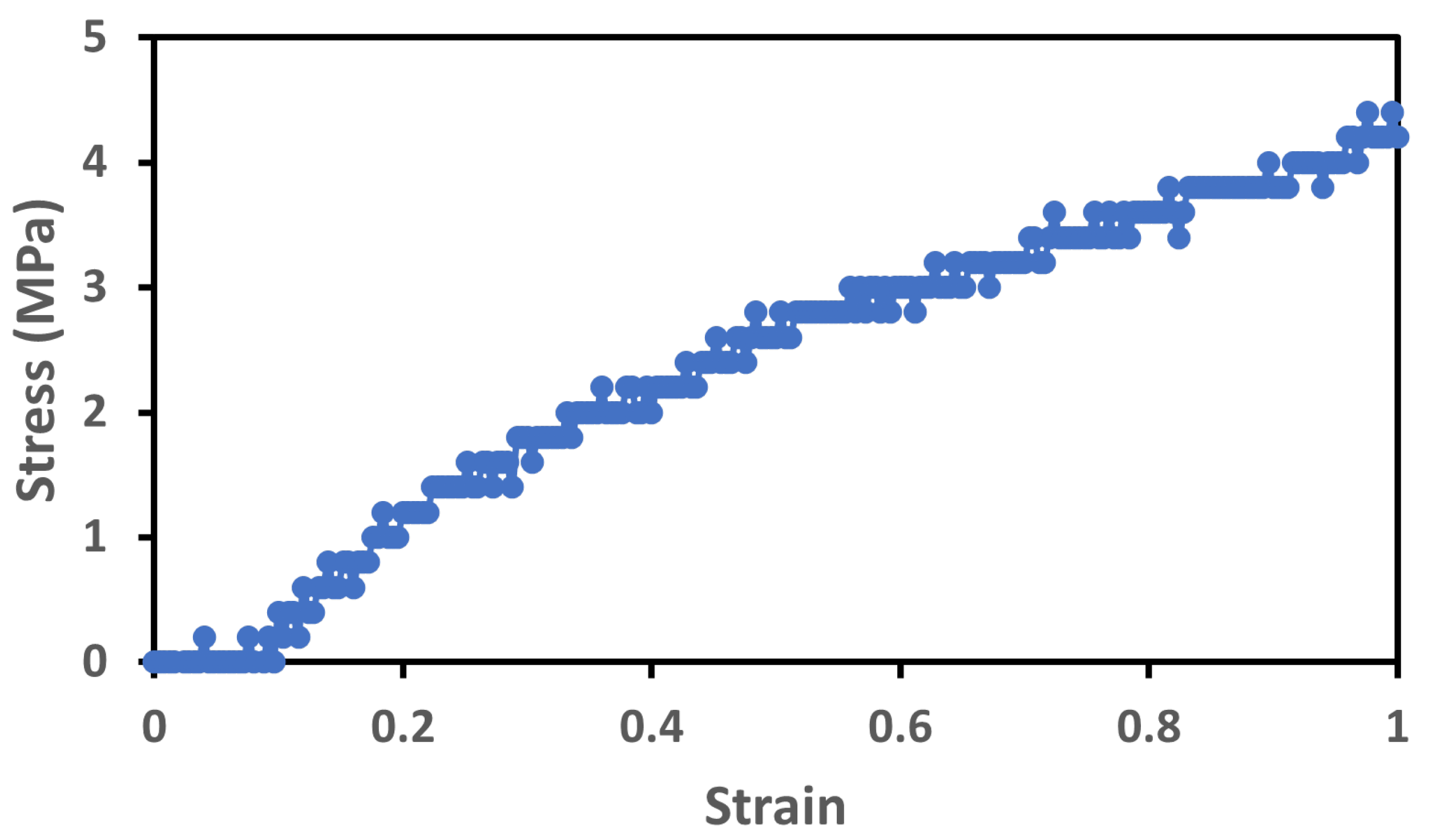
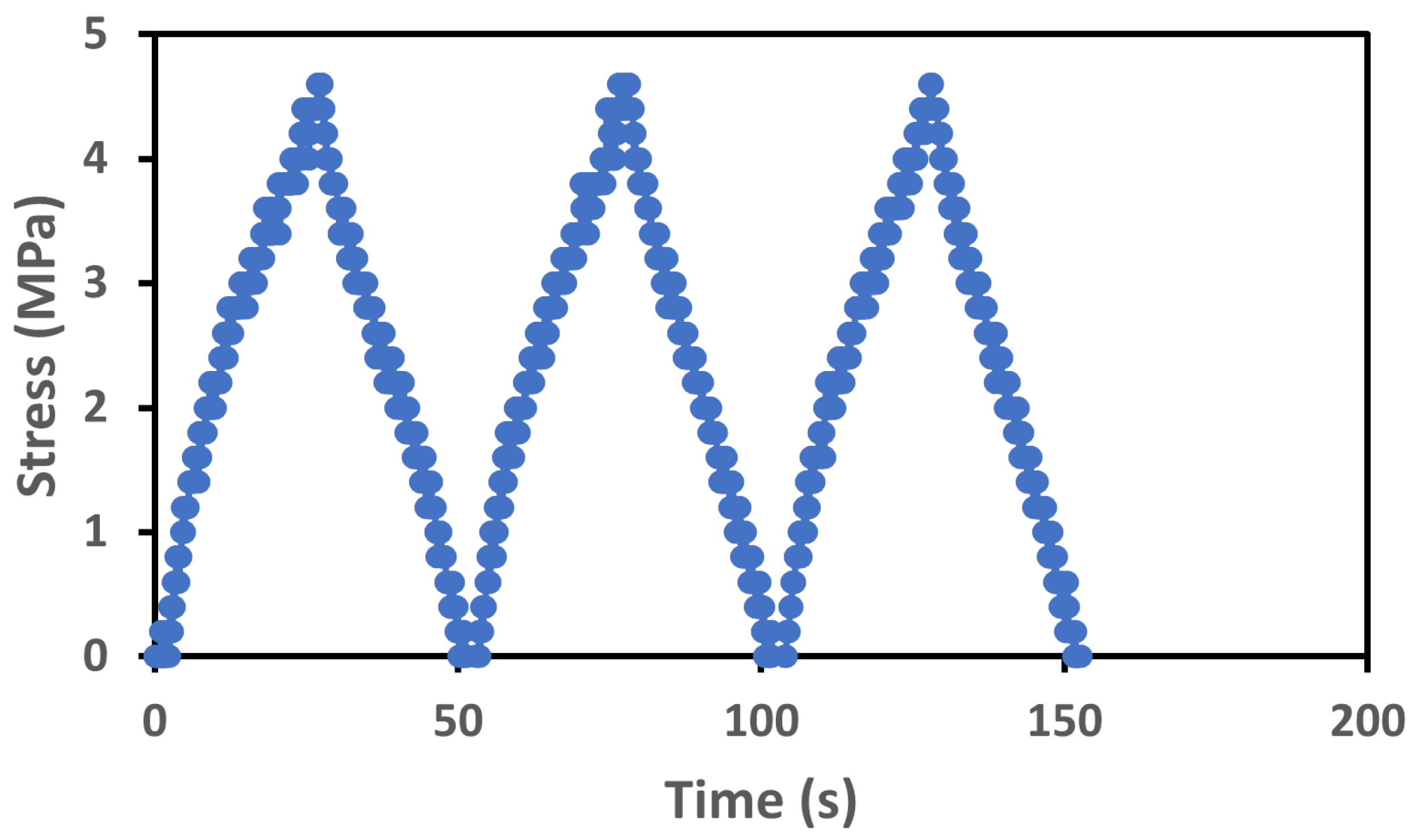
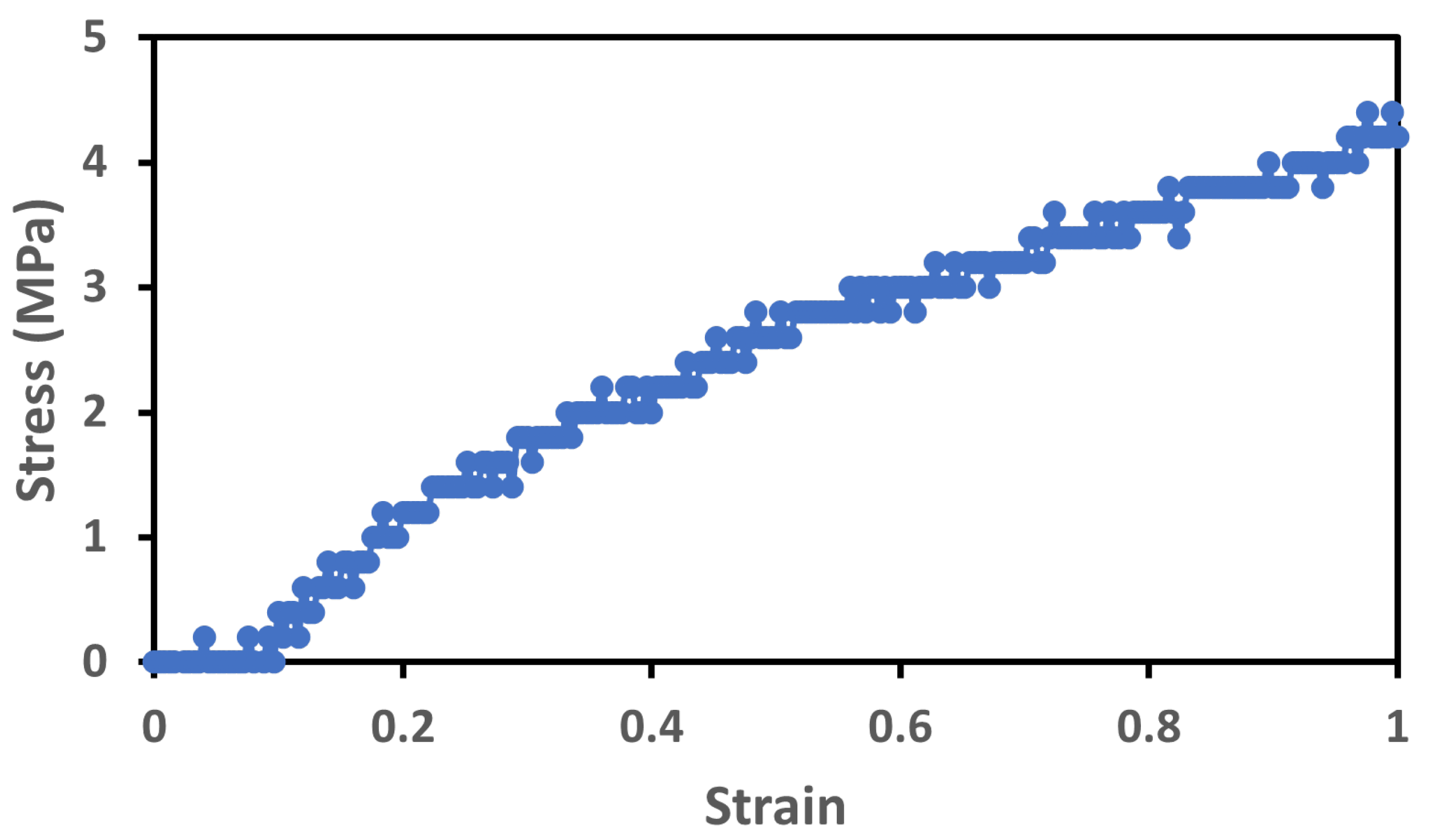
3.2.1. Stress–Strain Characteristics
- Strain = 100%;
- Strain rate = 1 mm/s;
- Specimen type- rectangular (length = 25 mm, Width = 10 mm, and thickness = 0.2 mm).
3.2.2. Stress Relaxation Test
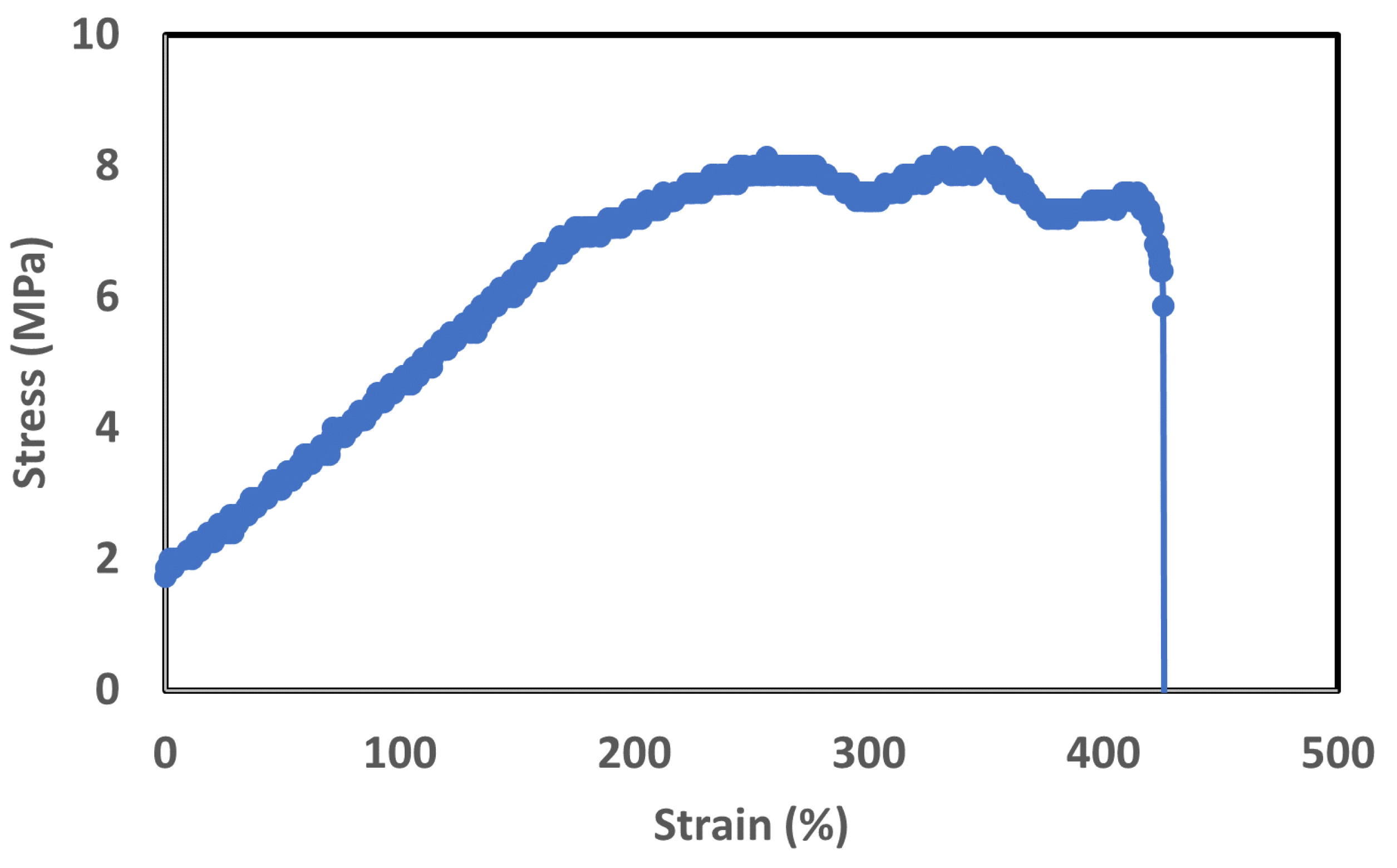
3.2.3. Elongation at Break Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| EAPs | Electroactive polymers |
| DBSA | Dodecyl benzene sulfonate anion |
| SEBS | Styrene-ethylene-butylene-styrene |
| PANI | Polyaniline |
| HMI | Human–machine interface |
| PDMS | Polydimethylsiloxane |
| UTM | Uniaxial tensile machine |
| DE film | Dielectric film |
| SS characteristics | Stress–strain characteristics |
| g-MA | Graft-maleic anhydride |
| CP | Conducting polymer |
| i-EAPs | Ionic electroactive polymers |
| e-EAPs | Electronic electroactive polymers |
| DEs | Dielectric elastomers |
| PVDF | Polyvinylidene fluoride |
| IPMC | Ionic polymer-metal composites |
| SEM | Scanning Electron Microscope |
| GF | Gauge factor |
References
- Glauser, O.; Panozzo, D.; Hilliges, O.; Sorkine-Hornung, O. Deformation capture via soft and stretchable sensor arrays. ACM Trans. Graph. 2019, 38, 16. [Google Scholar] [CrossRef]
- Zhu, Y.; Giffney, T.; Aw, K. A Dielectric Elastomer-Based Multimodal Capacitive Sensor. Sensors 2022, 22, 622. [Google Scholar] [CrossRef]
- Singh, N.K.; Takashima, K.; Shibata, T. Dielectric elastomer based stretchable textile sensor for capturing motion. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXII, Online, 23 April 2020; Bar-Cohen, Y., Anderson, I.A., Shea, H.R., Eds.; SPIE: Bellingham, WA, USA, 2020. [Google Scholar] [CrossRef]
- Romasanta, L.J.; Lopez-Manchado, M.A.; Verdejo, R. Increasing the performance of dielectric elastomer actuators: A review from the materials perspective. Prog. Polym. Sci. 2015, 51, 188–211. [Google Scholar] [CrossRef]
- Zhao, Z.; Chen, Y.; Hu, X.; Bao, R.; Wu, B.; Chen, W. Vibrations and waves in soft dielectric elastomer structures. Int. J. Mech. Sci. 2023, 239, 107885. [Google Scholar] [CrossRef]
- Tang, C.; Du, B.; Jiang, S.; Wang, Z.; Liu, X.J.; Zhao, H. A Review on High-Frequency Dielectric Elastomer Actuators: Materials, Dynamics, and Applications. Adv. Intell. Syst. 2023, 2300047. [Google Scholar] [CrossRef]
- Zhao, Y.; Yin, L.-J.; Zhong, S.-L.; Zha, J.-W.; Dang, Z.-M. Review of dielectric elastomers for actuators, generators and sensors. IET Nanodielectrics 2020, 3, 99–106. [Google Scholar] [CrossRef]
- Singh, N.K. Energy Harvesting Using Dielectric Elastomer. Master’s Thesis, Indian Institute of Technology Patna, Bihar, India, 2014. [Google Scholar]
- Wang, J.; Lu, C.; Zhang, K. Textile-based strain sensor for human motion detection. Energy Environ. Mater. 2020, 3, 80–100. [Google Scholar] [CrossRef]
- Souri, H.; Banerjee, H.; Jusufi, A.; Radacsi, N.; Stokes, A.A.; Park, I.; Sitti, M.; Amjadi, M. Wearable and stretchable strain sensors: Materials, sensing mechanisms, and applications. Adv. Intell. Syst. 2020, 2, 2000039. [Google Scholar] [CrossRef]
- Huang, B.; Li, M.; Mei, T.; McCoul, D.; Qin, S.; Zhao, Z.; Zhao, J. Wearable stretch sensors for motion measurement of the wrist joint based on dielectric elastomers. Sensors 2017, 17, 2708. [Google Scholar] [CrossRef] [PubMed]
- Tao, Y.D.; Gu, G.Y.; Zhu, L.M. Design and performance testing of a dielectric elastomer strain sensor. Int. J. Intell. Robot. Appl. 2017, 1, 451–458. [Google Scholar] [CrossRef]
- Zeng, X.; Deng, H.T.; Wen, D.L.; Li, Y.Y.; Xu, L.; Zhang, X.S. Wearable Multi-Functional Sensing Technology for Healthcare Smart Detection. Micromachines 2022, 13, 254. [Google Scholar] [CrossRef] [PubMed]
- Wissler, M.; Mazza, E. Mechanical behavior of an acrylic elastomer used in dielectric elastomer actuators. Sensors Actuators Phys. 2007, 134, 494–504. [Google Scholar] [CrossRef]
- Oh, I.-K.; Jeon, J.-H. Graphene-based Ionic Polymer Actuators. In Ionic Polymer Metal Composites (IPMCs): Smart Multi-Functional Materials and Artificial Muscles, 1st ed.; Shahinpoor, M., Ed.; Royal Society of Chemistry: Cambridge, UK, 2015; Volume 1, pp. 148–168. ISBN 978-1-78262-258-1. [Google Scholar]
- Wang, J.; McDaid, A.; Sharma, R.; Yu, W.; Aw, K.C. Miniature Pump with Ionic Polymer Metal Composite Actuator for Drug Delivery. In Ionic Polymer Metal Composites (IPMCs): Smart Multi-Functional Materials and Artificial Muscles, 1st ed.; Shahinpoor, M., Ed.; Royal Society of Chemistry: Cambridge, UK, 2015; Volume 2, pp. 19–45. ISBN 978-1-78262-723-4. [Google Scholar]
- Johanson, U.; Punning, A.; Aabloo, A. Ionic Polymer Metal Composites with Electrochemically Active Electrodes. In Ionic Polymer Metal Composites (IPMCs): Smart Multi-Functional Materials and Artificial Muscles, 1st ed.; Shahinpoor, M., Ed.; Royal Society of Chemistry: Cambridge, UK, 2015; Volume 1, pp. 215–227. ISBN 978-1-78262-258-1. [Google Scholar]
- Chuc, N.H.; Thuy, D.V.; Park, J.; Kim, D.; Koo, J.; Lee, Y.; Nam, J.D.; Choi, H.R. A dielectric elastomer actuator with self-sensing capability. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) 2008, San Diego, CA, USA, 10 April 2008. [Google Scholar] [CrossRef]
- Rahman, M.H.; Werth, H.; Goldman, A.; Hida, Y.; Diesner, C.; Lane, L.; Menezes, P.L. Recent Progress on Electroactive Polymers: Synthesis, Properties and Applications. Ceramics 2021, 4, 516–541. [Google Scholar] [CrossRef]
- Toth, L.A.; Goldenberg, A.A. Control system design for a dielectric elastomer actuator: The sensory subsystem. In Proceedings of the Smart Structures and Materials 2002: Electroactive Polymer Actuators and Devices (EAPAD), San Diego, CA, USA, 11 July 2002; Volume 4695, pp. 323–334. [Google Scholar]
- Palza, H.; Zapata, P.A.; Angulo-Pineda, C. Electroactive Smart Polymers for Biomedical Applications. Materials 2019, 12, 277. [Google Scholar] [CrossRef] [PubMed]
- Singh, N.K.; Takashima, K.; Pandey, S.S. Tear strength estimation of electroactive polymer-based strain sensors. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXIV, SPIE, Long Beach, CA, USA, 20 April 2022. [Google Scholar] [CrossRef]
- Singh, N.K. Fabrication, Characterization and Modeling of Electroactive Polymer-Based Strain Sensors for Wearable Applications. Ph.D. Thesis, Kyushu Institute of Technology, Fukuoka, Japan, 2022. [Google Scholar] [CrossRef]
- Jung, W.; Toi, Y. Computational Modeling of Electromechanical Behaviors of Dielectric Elastomer Actuators. In Proceedings of the World Congress on Engineering 2012, London, UK, 4–6 July 2012; Volume 2182, pp. 2230–2235. [Google Scholar]
- Yadav, A.K.; Yadav, N.; Wu, Y.; Ramakrishna, S.; Zheng, H. Wearable Strain Sensors: State-of-art and Future Applications. Mater. Adv. 2023. [Google Scholar] [CrossRef]
- Ozlem, K.; Atalay, O.; Atalay, A.; Ince, G. Textile based sensing system for lower limb motion monitoring. In Proceedings of the Converging Clinical and Engineering Research on Neurorehabilitation III: Proceedings of the 4th International Conference on NeuroRehabilitation (ICNR2018), Pisa, Italy, 16–20 October 2018; Springer: Cham, Switzerland, 2018; pp. 395–399. [Google Scholar]
- Zaheer, M.U.; Chang, S.H. Recent trend in stretchable composite sensors for wearable robot applications. Adv. Compos. Mater. 2023, 1–22. [Google Scholar] [CrossRef]
- Singh, N.K.; Takashima, K.; Pandey, S.S. Electronic versus Ionic Electroactive Polymers (EAPs) Strain Sensors for Wearable Electronics: A Comparative Study. Eng. Proc. 2022, 21, 1. [Google Scholar]
- Laflamme, S.; Kollosche, M.; Connor, J.J.; Kofod, G. Robust flexible capacitive surface sensor for structural health monitoring applications. J. Eng. Mech. 2012, 139, 879–885. [Google Scholar] [CrossRef]
- Jung, K.; Kim, K.J.; Choi, H.R. A self-sensing dielectric elastomer actuator. Sensors Actuators A Phys. 2008, 143, 343–351. [Google Scholar] [CrossRef]
- Zhang, H.; Wang, M.Y.; Li, J.; Zhu, J. A soft compressive sensor using dielectric elastomers. Smart Mater. Struct. 2016, 25, 035045. [Google Scholar] [CrossRef]
- Dong, T.; Gu, Y.; Liu, T.; Pecht, M. Resistive and capacitive strain sensors based on customized compliant electrode: Comparison and their wearable applications. Sensors Actuators A Phys. 2021, 326, 112720. [Google Scholar] [CrossRef]
- Atalay, O. Textile-based, interdigital, capacitive, soft-strain sensor for wearable applications. Materials 2018, 11, 768. [Google Scholar] [CrossRef] [PubMed]
- Cholleti, E.R.; Stringer, J.; Kelly, P.; Bowen, C.; Aw, K. Mechanical Behaviour of Large Strain Capacitive Sensor with Barium Titanate Ecoflex Composite Used to Detect Human Motion. Robotics 2021, 10, 69. [Google Scholar] [CrossRef]
- Filippidou, M.K.; Tegou, E.; Tsouti, V.; Chatzandroulis, S. A flexible strain sensor made of graphene nanoplatelets/polydimethyl- 265 siloxane nanocomposite. Microelectron. Eng. 2015, 142, 7–11. [Google Scholar] [CrossRef]
- Singh, N.K.; Takashima, K.; Pandey, S.S. Fabrication, characterization and modelling of the fabric electrode-based highly stretchable capacitive strain sensor. Mater. Today Commun. 2022, 32, 104095. [Google Scholar] [CrossRef]
- Steck, D.; Qu, J.; Kordmahale, S.B.; Tscharnuter, D.; Muliana, A.; Kameoka, J. Mechanical responses of Ecoflex silicone rubber: Compressible and incompressible behaviors. J. Appl. Polym. Sci. 2019, 136, 47025. [Google Scholar] [CrossRef]
- Martins, P.; Lopes, A.C.; Lanceros-Mendez, S. Electroactive phases of poly(vinylidene fluoride): Determination, processing and applications. Prog. Polym. Sci. 2014, 39, 683–706. [Google Scholar] [CrossRef]
- Ullah, H.; Wahab, M.A.; Will, G.; Karim, M.R.; Pan, T.; Gao, M.; Lai, D.; Lin, Y.; Miraz, M.H. Recent Advances in Stretchable and Wearable Capacitive Electrophysiological Sensors for Long-Term Health Monitoring. Biosensors 2022, 12, 630. [Google Scholar] [CrossRef]
- Böse, H.; Ehrlich, J. Dielectric Elastomer Sensors with Advanced Designs and Their Applications. Actuators 2023, 12, 115. [Google Scholar] [CrossRef]
- Laflamme, S.; Kollosche, M.; Connor, J.J.; Kofod, G. Soft capacitive sensor for structural health monitoring of large-scale systems. Struct. Control. Health Monit. 2012, 19, 70–81. [Google Scholar] [CrossRef]
- Giurgiutiu, V. Piezoelectricity Principles and Materials. Encyclopedia of Structural Health Monitoring; Wiley: New York, NY, USA, 2009; pp. 981–991. [Google Scholar]
- Laflamme, S.; Kollipara, V.D.; Saleem, H.S.; Geiger, R.L. Large-scale flexible membrane for automatic strain monitoring of transportation infrastructure. Int. J. Pavement Res. Technol. 2012, 5, 343–346. [Google Scholar]
- Liu, Y.; Wang, H.; Zhao, W.; Zhang, M.; Qin, H.; Xie, Y. Flexible, Stretchable Sensors for Wearable Health Monitoring: Sensing Mechanisms, Materials, Fabrication Strategies and Features. Sensors 2018, 18, 645. [Google Scholar] [CrossRef]
- Alekseyev, N.I.; Khmelnitskiy, I.K.; Aivazyan, V.M.; Broyko, A.P.; Korlyakov, A.V.; Luchinin, V.V. Ionic EAP Actuators with Electrodes Based on Carbon Nanomaterials. Polymers 2021, 13, 4137. [Google Scholar] [CrossRef]
- Yamakita, M.; Sera, A.; Kamamichi, N.; Asaka, K. Integrated Design of an Ionic Polymer–Metal Composite Actuator/Sensor. Adv. Robot. 2008, 22, 913–928. [Google Scholar] [CrossRef]
- Martinez, J.G.; Otero, T.F. Mechanical awareness from sensing artificial muscles: Experiments and modeling. Sens. Actuator B Chem. 2014, 195, 365–372. [Google Scholar] [CrossRef]
- Truong, D.Q.; Ahn, K.K. Modeling of an ionic polymer metal composite actuator based on an extended Kalman filter trained neural network. Smart Mater. Struct. 2014, 23, 074008. [Google Scholar] [CrossRef]
- Chen, C.-H.; Wang, J.-M.; Chen, W.-Y. Conductive Polyaniline Doped with Dodecyl Benzene Sulfonic Acid: Synthesis, Characterization, and Antistatic Application. Polymers 2020, 12, 2970. [Google Scholar] [CrossRef]
- Zare, E.N.; Makvandi, P.; Ashtari, B.; Rossi, F.; Motahari, A.; Perale, G. Progress in Conductive Polyaniline-Based Nanocomposites for Biomedical Applications: A Review. J. Med. Chem. 2020, 63, 1–22. [Google Scholar] [CrossRef]
- Huang, J.; Kaner, R.B. Conjugated Polymers: Theory, Synthesis, Properties, and Characterization, 3rd ed.; Skotheim, T.A., Reynolds, J., Eds.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Veeramuthu, L.; Venkatesan, M.; Benas, J.-S.; Cho, C.-J.; Lee, C.-C.; Lieu, F.-K.; Lin, J.-H.; Lee, R.-H.; Kuo, C.-C. Recent Progress in Conducting Polymer Composite/Nanofiber-Based Strain and Pressure Sensors. Polymers 2021, 13, 4281. [Google Scholar] [CrossRef]
- Muller, D.; Garcia, M.; Salmoria, G.V.; Pires, A.T.N.; Paniago, R.; Barra, G.M.O. SEBS/PPy. DBSA blends: Preparation and evaluation of electromechanical and dynamic mechanical properties. J. Appl. Polym. Sci. 2011, 120, 351–359. [Google Scholar] [CrossRef]
- Teixeira, J.; Horta-Romarís, L.; Abad, M.J.; Costa, P.; Lanceros-Méndez, S. Piezoresistive response of extruded polyaniline/(styrene-butadiene-styrene) polymer blends for force and deformation sensors. Mater. Des. 2018, 141, 1–8. [Google Scholar] [CrossRef]
- Castro Neto, A.H.; Guinea, F.; Peres, N.M.R.; Novoselov, K.S.; Geim, A.K. The electronic properties of graphene. Rev. Mod. Phys. 2009, 81, 109–162. [Google Scholar] [CrossRef]
- Perrin, D.; Léger, R.; Otazaghine, B.; Ienny, P. Hyperelastic behavior of modified sepiolite/SEBS thermoplastic elastomers. J. Mater. Sci. 2017, 52, 7591–7604. [Google Scholar] [CrossRef]
- Del Castillo-Castro, T.; Castillo-Ortega, M.M.; Villarreal, I.; Brown, F.; Grijalva, H.; Pérez-Tello, M.; Nuño-Donlucas, S.M.; Puig, J.E. Synthesis and characterization of composites of DBSA-doped polyaniline and polystyrene-based ionomers. Compos. Part A Appl. Sci. Manuf. 2007, 38, 639–645. [Google Scholar] [CrossRef]
- Vytřas, K.; Svancara, I.; Metelka, R. Carbon paste electrodes in electroanalytical chemistry. J. Serbian Chem. Soc. 2009, 74, 1021–1033. [Google Scholar] [CrossRef]
- Goodwin, R.J.A.; Nilsson, A.; Borg, D.; Langridge-Smith, P.R.R.; Harrison, D.J.; Mackay, C.L.; Iverson, S.L.; Andrén, P.E. Conductive carbon tape used for support and mounting of both whole animal and fragile heat-treated tissue sections for MALDI MS imaging and quantitation. J. Proteom. 2012, 75, 4912–4920. [Google Scholar] [CrossRef]
- Kollosche, M.; Stoyanov, H.; Laflamme, S.; Kofod, G. Strongly enhanced sensitivity in elastic capacitive strain sensors. J. Mater. Chem. 2011, 21, 8292. [Google Scholar] [CrossRef]
- Singh, N.K.; Takashima, K.; Pandey, S.S. Mechanical Modelling and Stress-Strain Prediction of Electroactive Polymer-Based Capacitive Sensor under Multiaxial Loads using Uniaxial Tensile Data. Sensors Transducers 2022, 259, 12–18. [Google Scholar]
- Singh, N.K.; Takashima, K.; Pandey, S.S. Fatigue life prediction of electroactive polymer strain sensor. In Proceedings of the Electroactive Polymer Actuators and Devices (EAPAD) XXIII, Online, 22 March 2021; SPIE: Bellingham, WA, USA, 2021. [Google Scholar]
- Qiu, A.; Jia, Q.; Yu, H.; Oh, J.-A.; Li, D.; Hsu, H.-Y.; Kawashima, N.; Zhuge, Y.; Ma, J. Highly sensitive and flexible capacitive elastomeric sensors for compressive strain measurements. Mater. Today Commun. 2021, 26, 102023. [Google Scholar] [CrossRef]
- Rizzello, G. A Review of Cooperative Actuator and Sensor Systems Based on Dielectric Elastomer Transducers. Actuators 2023, 588, 46. [Google Scholar] [CrossRef]
- Yao, S.; Zhu, Y. Wearable multifunctional sensors using printed stretchable conductors made of silver nanowires. Nanoscale 2014, 590, 2345. [Google Scholar] [CrossRef]
- Yong, S.; Aw, K. Multi-Layered Carbon-Black/Elastomer-Composite-Based Shielded Stretchable Capacitive Sensors for the 592 Underactuated Robotic Hand. Robotics 2022, 11, 58. [Google Scholar] [CrossRef]
- Cataldi, P.; Papageorgiou, D.G.; Pinter, G.; Kretinin, A.V.; Sampson, W.W.; Young, R.J.; Bissett, M.; Kinloch, I.A. Graphene–Polyurethane Coatings for Deformable Conductors and Electromagnetic Interference Shielding. Adv. Electron. Mater. 2020, 6, 2000429. [Google Scholar] [CrossRef]
- Liu, X.; Sun, H.; Liu, S.; Jiang, Y.; Yin, Z.; Yu, B.; Ning, N.; Tian, M.; Zhang, L. Dielectric elastomer sensor with high dielectric constant and capacitive strain sensing properties by designing polar-nonpolar fluorosilicone multiblock copolymers and introducing 598 poly(dopamine) modified CNTs. Compos. Part B Eng. 2021, 223, 109103. [Google Scholar] [CrossRef]
- Wang, T.; Farajollahi, M.; Choi, Y.S.; Lin, I.T.; Marshall, J.E.; Thompson, N.M.; Kar-Narayan, S.; Madden, J.D.; Smoukov, S.K. Electroactive polymers for sensing. Interface Focus 2016, 6, 20160026. [Google Scholar] [CrossRef] [PubMed]
- Ni, N.; Zhang, L.; Zhou, J.; Wang, Y.; Liu, F. Dielectric elastomer cantilever beam sensor. In Proceedings of the SPIE Smart Structures and Materials Nondestructive Evaluation and Health Monitoring, San Diego, CA, USA, 8 March 2014; Bar-Cohen, Y., Ed.; International Society for Optics and Photonics: San Diego, CA, USA, 2014; p. 90561M. [Google Scholar] [CrossRef]
- Lv, X.; Liu, L.; Liu, Y.; Leng, J. Electromechanical Modeling of Softening Behavior for Dielectric Elastomers. ASME J. Appl. Mech. 2018, 85, 111010. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Electroactive Polymers as Artificial Muscles Capabilities, Potentials and Challenges. In Handbook on Biomimetics; Osada, Y., Ed.; NTS Inc.: Bakersfield, CA, USA, 2000; pp. 1–13. [Google Scholar]
- Rickaby, S.R.; Scott, N.H. A Model for the Mullins Effect During Multicyclic Equibiaxial Loading. Acta Mech. 2013, 224, 1887–1900. [Google Scholar] [CrossRef]
- Gour, S.; Kumar, D. Thermo-electrostrictive unequal-biaxial deformation instability of electro-active polymeric composites. Int. J. Non-Linear Mech. 2023, 156, 104481. [Google Scholar] [CrossRef]
- Allen, V.; Chen, L.; Englert, M.; Moussaoui, A.; Pisula, W. Control of Mullins stress softening in silicone elastomer composites by rational design of fumed silica fillers. Compos. Sci. Technol. 2021, 214, 108955. [Google Scholar] [CrossRef]
- Cantournet, S.; Desmorat, R.; Besson, J. Mullins effect and cyclic stress softening of filled elastomers by internal sliding and friction thermodynamics model. Int. J. Solids Struct. 2009, 46, 2255–2264. [Google Scholar] [CrossRef]
- Xavier, M.S.; Tawk, C.D.; Zolfagharian, A.; Pinskier, J.; Howard, D.; Young, T.; Lai, J.; Harrison, S.M.; Yong, Y.K.; Bodaghi, M.; et al. Soft Pneumatic Actuators: A Review of Design, Fabrication, Modeling, Sensing, Control and Applications. IEEE Access 2022, 1, 59442–59485. [Google Scholar] [CrossRef]
- Wang, H.; Lei, M.; Shengqiang, C. Viscoelastic deformation of a dielectric elastomer membrane subject to electromechanical loads. J. Appl. Phys. 2013, 113, 213508. [Google Scholar] [CrossRef]
- Lochmatter, P.; Kovacs, G.; Wissler, M. Characterization of dielectric elastomer actuators based on a visco-hyperelastic film model. Smart Mater. Struct. 2007, 16, 477–486. [Google Scholar] [CrossRef]
- Khanafer, K.; Duprey, A.; Schlicht, M.; Berguer, R. Effects of strain rate, mixing ratio, and stress–strain definition on the mechanical behavior of the polydimethylsiloxane (PDMS) material as related to its biological applications. Biomed. Microdevices 2008, 11, 503–508. [Google Scholar] [CrossRef]
- Wu, J.D.; Liechti, K.M. Multiaxial and Time-Dependent Behavior of a Filled Rubber. Mech. Time-Depend. Mater. 2000, 4, 293–331. [Google Scholar] [CrossRef]
- Tagarielli, V.L.; Hildick-Smith, R.; Huber, J.E. Electro-mechanical properties and electrostriction response of a rubbery polymer for EAP applications. Int. J. Solids Struct. 2012, 49, 3409–3415. [Google Scholar] [CrossRef]
- Wang, S.; Decker, M.; Henann, D.L.; Chester, S.A. Modeling of dielectric viscoelastomers with application to electromechanical instabilities. J. Mech. Phys. Solids 2016, 95, 213–229. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, Q. Harnessing large deformation and instabilities of soft dielectrics: Theory, experiment, and application. Appl. Phys. Rev. 2014, 1. [Google Scholar] [CrossRef]
- Zhao, X.; Koh, S.J.A.; Suo, Z. Nonequilibrium thermodynamics of dielectric elastomers. Int. J. Appl. Mech. 2011, 3, 203–217. [Google Scholar] [CrossRef]
- Duan, X.; Yuan, H.; Tang, W.; He, J.; Guan, X. An Engineering Prediction Model for Stress Relaxation of Polymer Composites at Multiple Temperatures. Polymers 2022, 14, 568. [Google Scholar] [CrossRef]
- Sun, H.; Fang, X.; Fang, Z.; Zhao, L.; Tian, B.; Verma, P.; Jiang, Z. An ultrasensitive and stretchable strain sensor based on a microcrack structure for motion monitoring. Microsyst. Nanoeng. 2022, 8, 111. [Google Scholar] [CrossRef] [PubMed]
- Costa, C.M.; Cardoso, V.F.; Martins, P.; Correia, D.M.; Gonçalves, R.; Costa, P.; Correia, V.; Ribeiro, C.; Fernandes, M.M.; Martins, P.M.; et al. Smart and Multifunctional Materials Based on Electroactive Poly (vinylidene fluoride): Recent Advances and Opportunities in Sensors, Actuators, Energy, Environmental, and Biomedical Applications. Chem. Rev. 2023, 123, 11392–11487. [Google Scholar] [CrossRef] [PubMed]
- Ma, J.; Cheng, Z.; Tan, S.; Zheng, T.; Zong, Y. High performance strain sensor based on leather activated by micro-cracking conductive layer. Collagen Leather 2023, 5, 1–12. [Google Scholar] [CrossRef]
- Tas, M.O.; Baker, M.A.; Masteghin, M.G.; Bentz, J.; Boxshall, K.; Stolojan, V. Highly stretchable, directionally oriented carbon nanotube/PDMS conductive films with enhanced sensitivity as wearable strain sensors. ACS Appl. Mater. Interfaces 2019, 11, 39560–39573. [Google Scholar] [CrossRef]
- Zheng, Y.; Li, Y.; Li, Z.; Wang, Y.; Dai, K.; Zheng, G.; Liu, C.; Shen, C. The effect of filler dimensionality on the electromechanical performance of polydimethylsiloxane based conductive nanocomposites for flexible strain sensors. Compos. Sci. Technol. 2017, 139, 64–73. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dielectric Film | Electrode | Capacitance | Ref. |
|---|---|---|---|
| SEBS rubber | Carbon grease | 32 pF | Our work |
| DBSA-doped | Carbon grease | 24.7 µF | Our work |
| EPDM/carbon black nanoparticles | Fabric type | in pF range | [63] |
| Acrylic/silicone | Carbon based/thin metal film | in pF range | [64] |
| Ecoflex | silver nanowires | in pF range | [65] |
| Carbon filled elastomer | Composite | in pF range | [66] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Singh, N.K.; Takashima, K.; Pandey, S.S. Enhancement in Capacitance of Ionic Type of EAP-Based Strain Sensors. Sensors 2023, 23, 9400. https://doi.org/10.3390/s23239400
Singh NK, Takashima K, Pandey SS. Enhancement in Capacitance of Ionic Type of EAP-Based Strain Sensors. Sensors. 2023; 23(23):9400. https://doi.org/10.3390/s23239400
Chicago/Turabian StyleSingh, Nitin Kumar, Kazuto Takashima, and Shyam S. Pandey. 2023. "Enhancement in Capacitance of Ionic Type of EAP-Based Strain Sensors" Sensors 23, no. 23: 9400. https://doi.org/10.3390/s23239400
APA StyleSingh, N. K., Takashima, K., & Pandey, S. S. (2023). Enhancement in Capacitance of Ionic Type of EAP-Based Strain Sensors. Sensors, 23(23), 9400. https://doi.org/10.3390/s23239400