
Research Hotspots and Trends of Social Robot Interaction Design: A Bibliometric Analysis

Abstract
:1. Introduction
- RQ1: What are the main focuses of SRID’s current research hotspots?
- RQ2: How has the research content in SRID evolved over the past decade in terms of temporal development? What are the overall trends?
- RQ3: What are the primary knowledge foundations and classical theories of SRID research?
- RQ4: Which scholars and institutions worldwide are the research subjects of SRID? What are the collaborative relationships between them?
2. Research Design
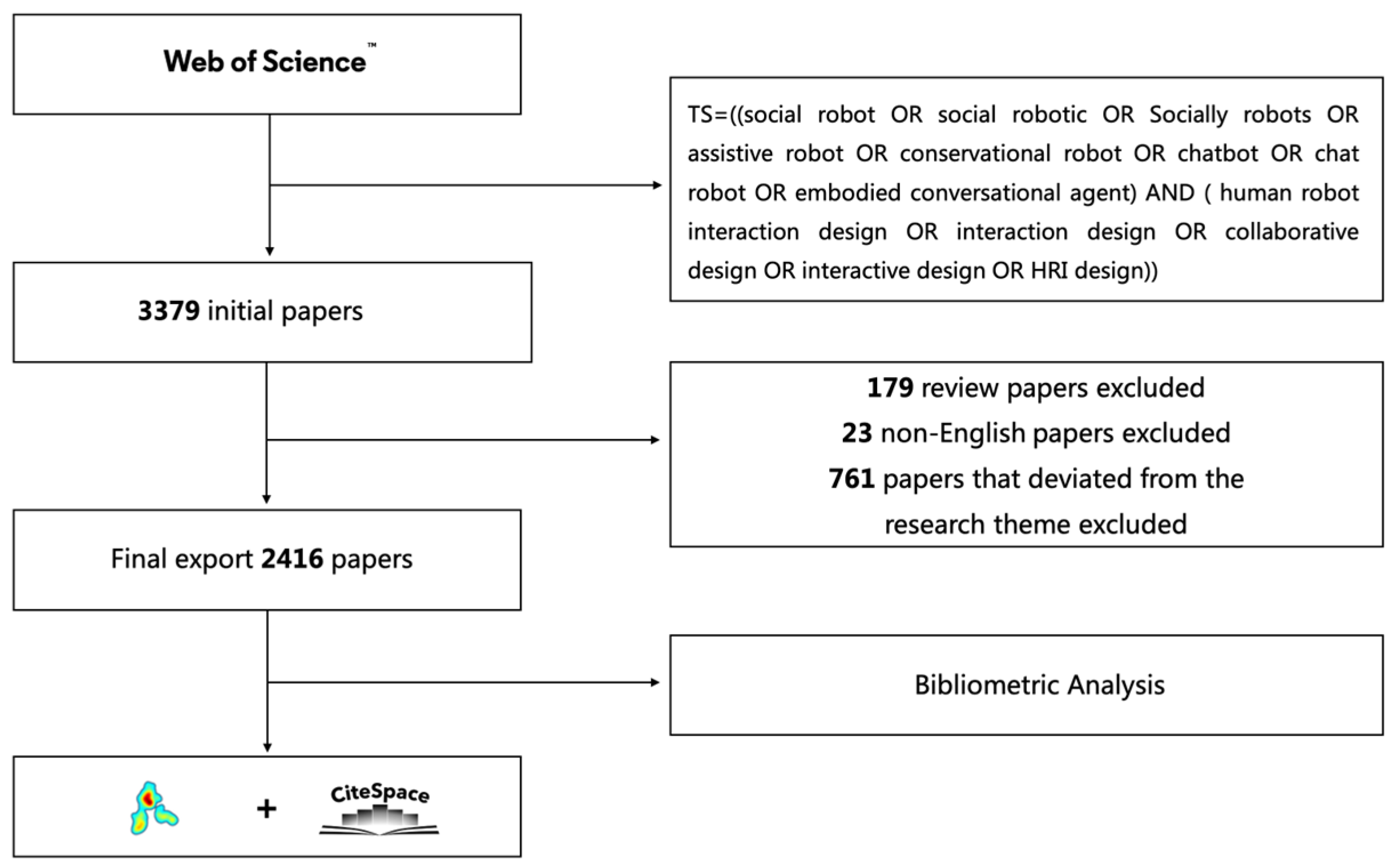
2.1. Data Sources
2.2. Research Methods
3. Bibliometric Results and Analysis
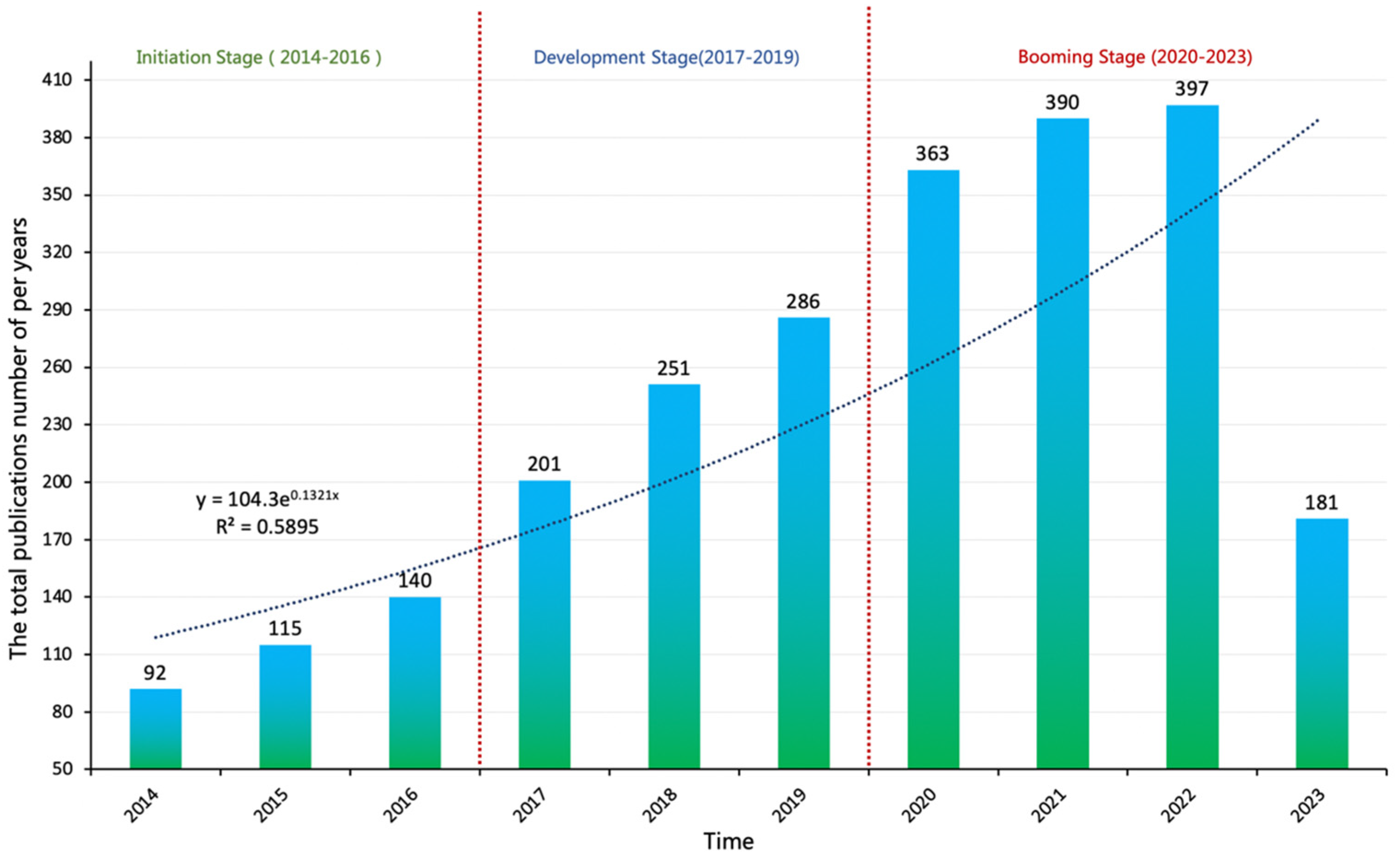
3.1. Trend Analysis of Annual Outputs of SRID Literature
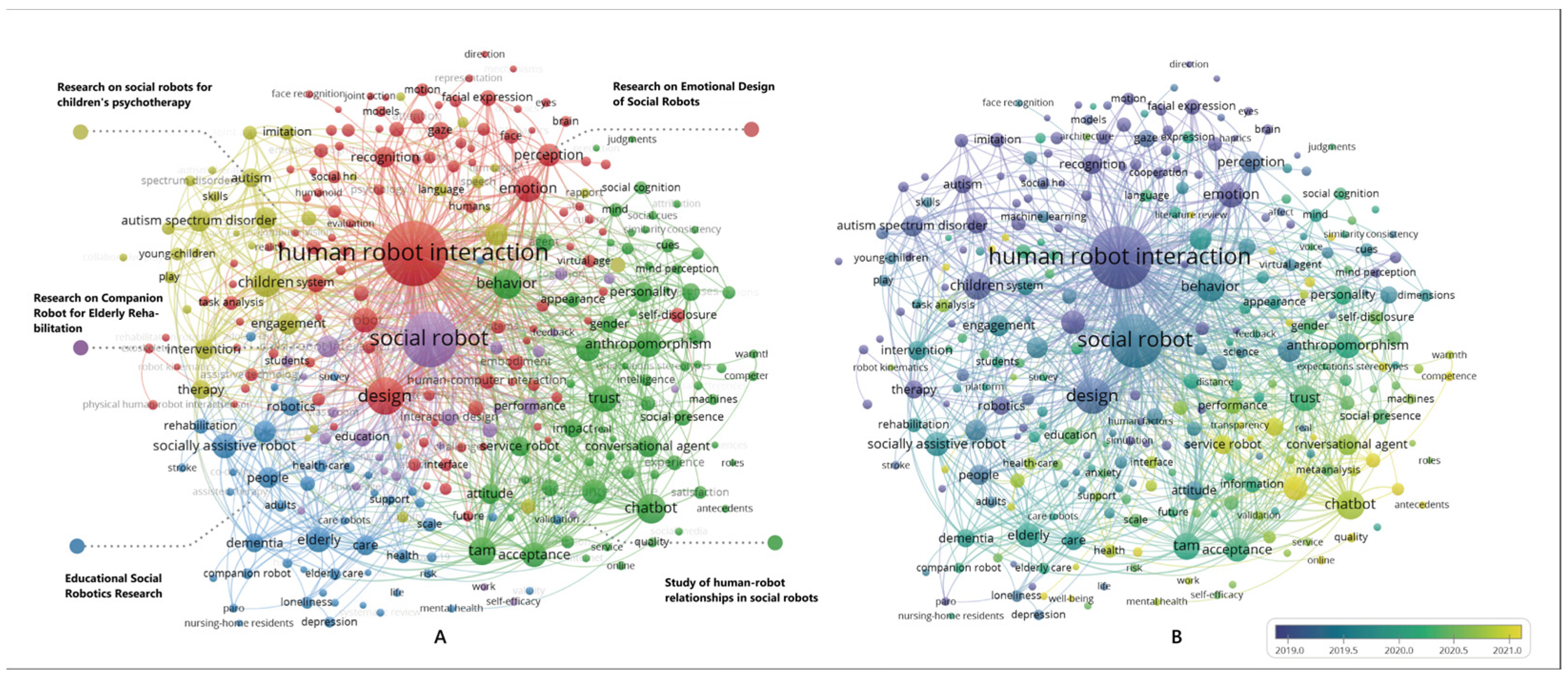
3.2. Research Hotspots of SRID
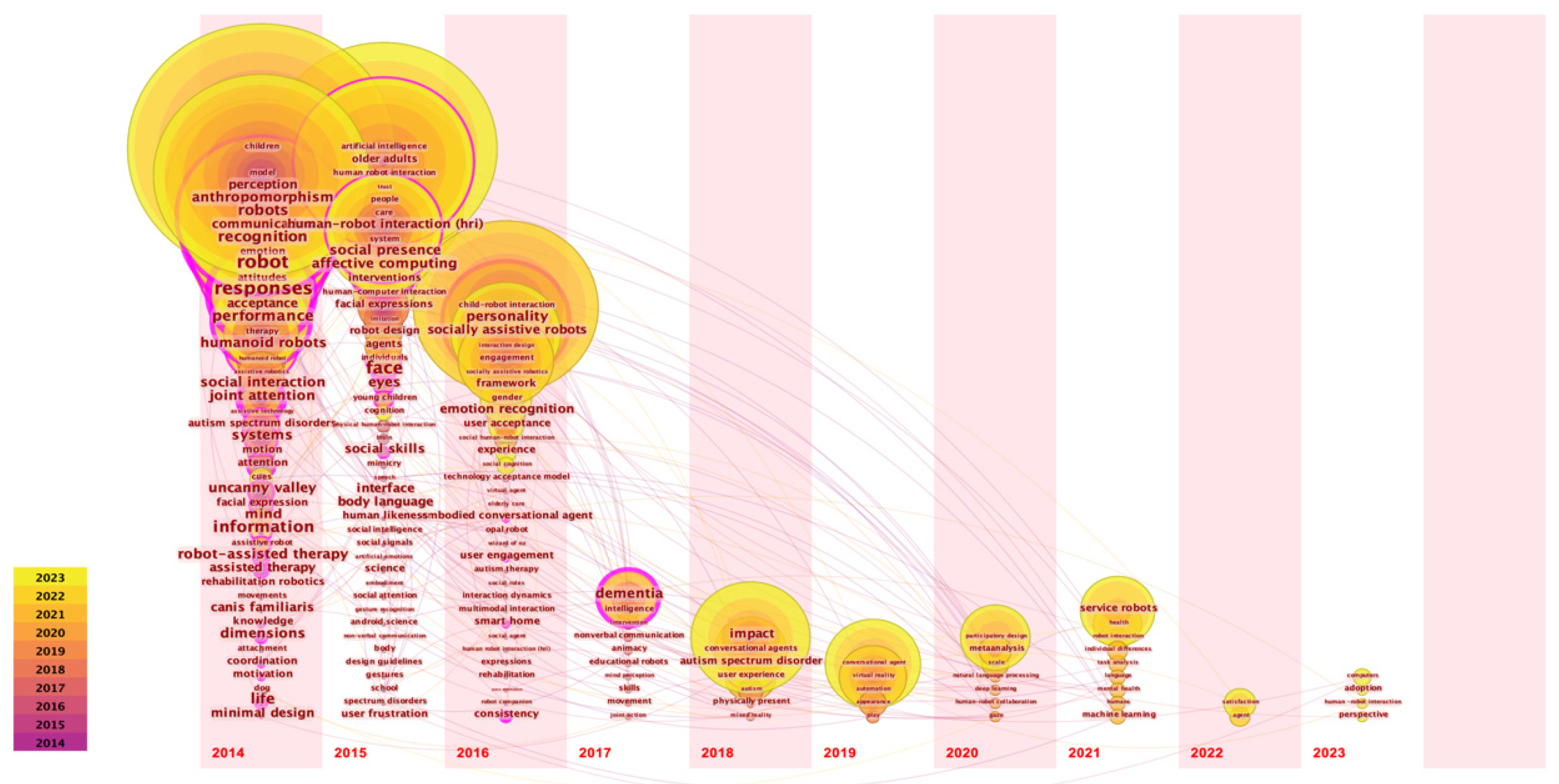
3.3. The Evolution and Trend of SRID Research Hotspots
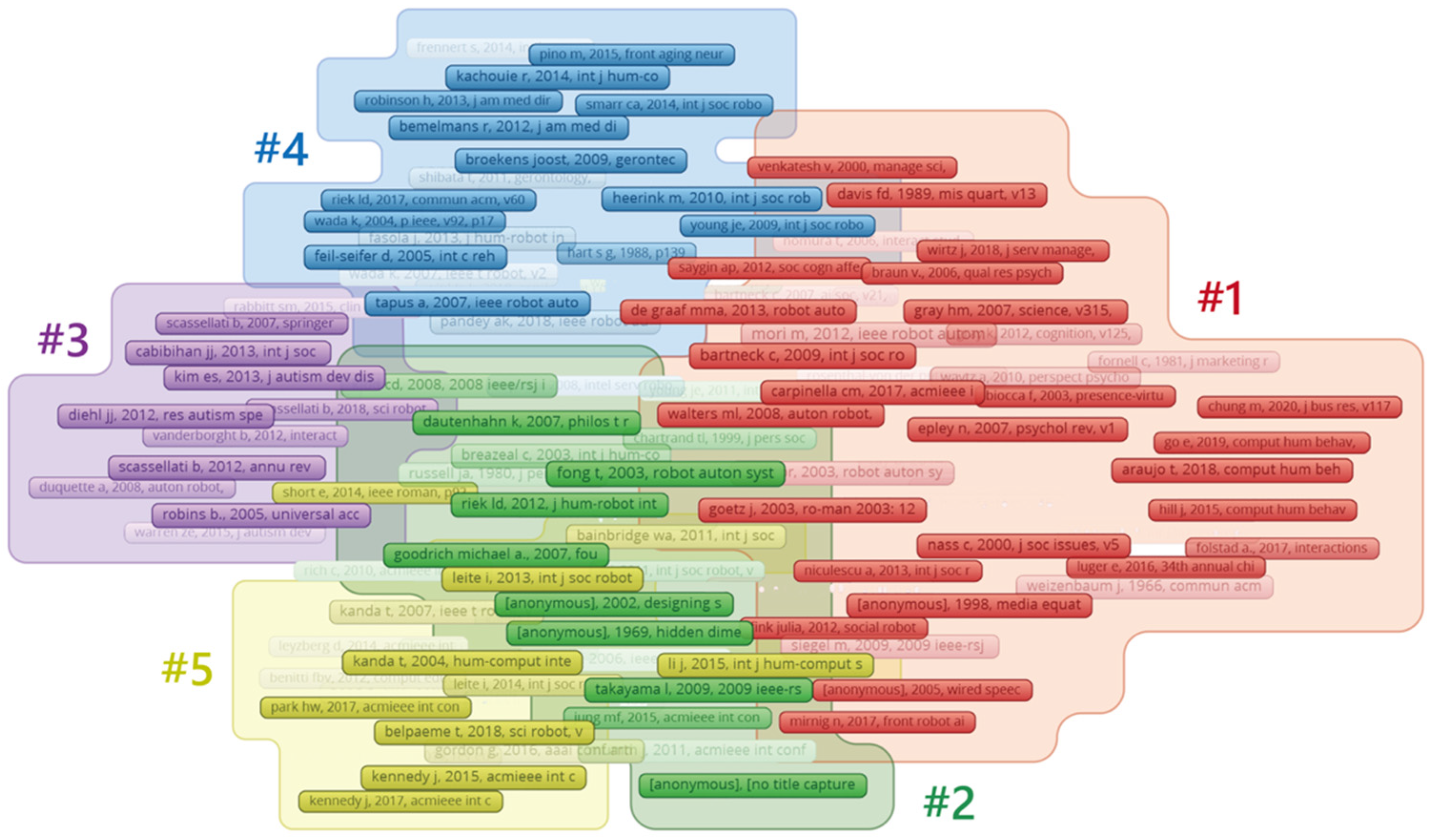
3.4. Knowledge Base of SR-HRI Research
3.5. Distribution of SRID Literature Sources
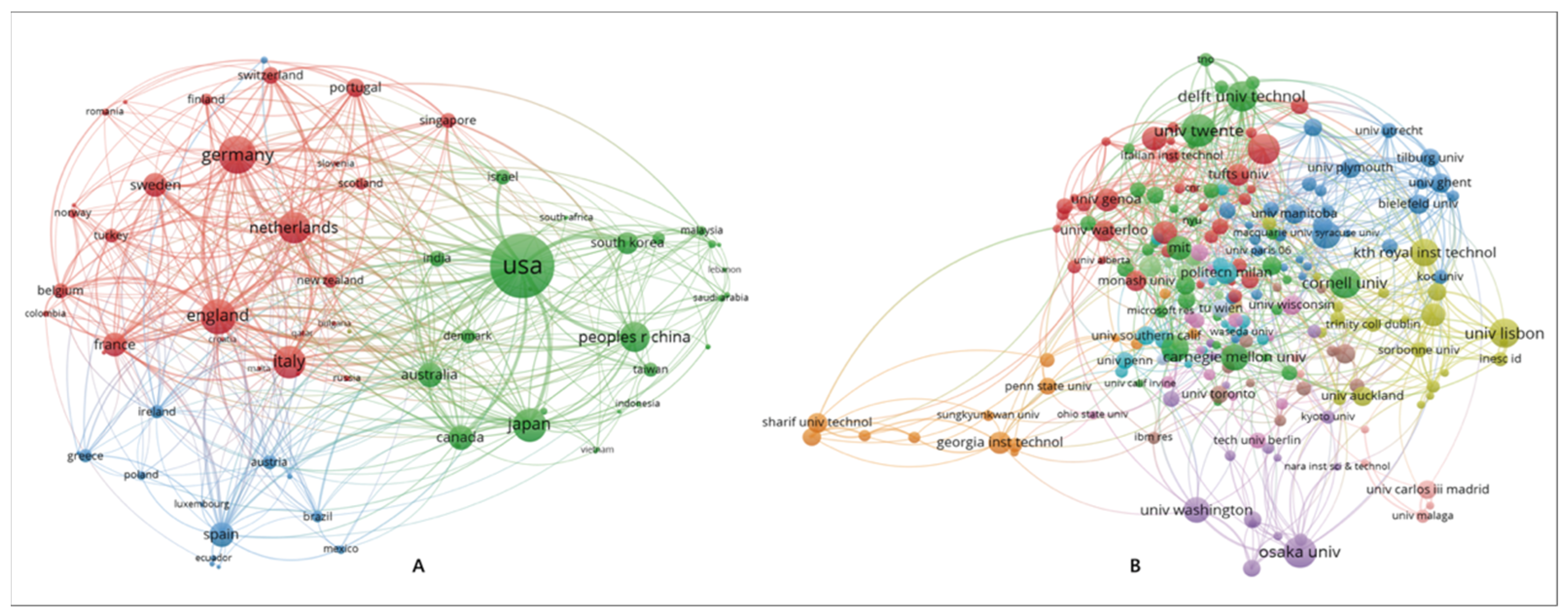
3.6. High-Impact Countries and Research Institutions
3.7. High-Impact Author Analysis
4. Discussion
5. Conclusions
6. Limitations and Future Research
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Eyssel, F.; Kuchenbrandt, D. Social Categorization of Social Robots: Anthropomorphism as a Function of Robot Group Membership. Br. J. Soc. Psychol. 2012, 51, 724–731. [Google Scholar] [CrossRef] [PubMed]
- Dou, X.; Wu, C.-F.; Lin, K.-C.; Gan, S.; Tseng, T.-M. Effects of Different Types of Social Robot Voices on Affective Evaluations in Different Application Fields. Int. J. Soc. Robot. 2021, 13, 615–628. [Google Scholar] [CrossRef]
- Alenljung, B.; Lindblom, J.; Andreasson, R.; Ziemke, T. User Experience in Social Human-Robot Interaction. In Rapid Automation: Concepts, Methodologies, Tools, and Applications; IGI Global: Hershey, PA, USA, 2019; pp. 1468–1490. [Google Scholar]
- Van Pinxteren, M.M.; Wetzels, R.W.; Rüger, J.; Pluymaekers, M.; Wetzels, M. Trust in Humanoid Robots: Implications for Services Marketing. J. Serv. Mark. 2019, 33, 507–518. [Google Scholar] [CrossRef]
- Rueben, M.; Aroyo, A.M.; Lutz, C.; Schmölz, J.; Van Cleynenbreugel, P.; Corti, A.; Agrawal, S.; Smart, W.D. Themes and Research Directions in Privacy-Sensitive Robotics. In Proceedings of the 2018 IEEE Workshop on Advanced Robotics and Its Social Impacts (ARSO), Madrid, Spain, 1–5 October 2018; pp. 77–84. [Google Scholar]
- Chatterjee, S.; Ghosh, S.K.; Chaudhuri, R.; Nguyen, B. Are Crm Systems Ready for AI Integration? Bottom Line 2019, 32, 144–157. [Google Scholar] [CrossRef]
- Atman Uslu, N.; Yavuz, G.Ö.; Koçak Usluel, Y. A Systematic Review Study on Educational Robotics and Robots. Interact. Learn. Environ. 2022, 1–25. [Google Scholar] [CrossRef]
- Park, S.S.; Tung, C.D.; Lee, H. The Adoption of Ai Service Robots: A Comparison between Credence and Experience Service Settings. Psychol. Mark. 2021, 38, 691–703. [Google Scholar] [CrossRef]
- Christoforakos, L.; Gallucci, A.; Surmava-Große, T.; Ullrich, D.; Diefenbach, S. Can Robots Earn Our Trust the Same Way Humans Do? A Systematic Exploration of Competence, Warmth, and Anthropomorphism as Determinants of Trust Development in Hri. Front. Robot. AI 2021, 8, 79. [Google Scholar] [CrossRef]
- Duffy, B.R. Anthropomorphism and the Social Robot. Robot. Auton. Syst. 2003, 42, 177–190. [Google Scholar] [CrossRef]
- Chung, H.; Kang, H.; Jun, S. Verbal Anthropomorphism Design of Social Robots: Investigating Users’ Privacy Perception. Comput. Hum. Behav. 2023, 142, 107640. [Google Scholar] [CrossRef]
- Khan, S.; Germak, C. Reframing Hri Design Opportunities for Social Robots: Lessons Learnt from a Service Robotics Case Study Approach Using Ux for Hri. Future Internet 2018, 10, 101. [Google Scholar] [CrossRef]
- Deutsch, I.; Erel, H.; Paz, M.; Hoffman, G.; Zuckerman, O. Home Robotic Devices for Older Adults: Opportunities and Concerns. Comput. Hum. Behav. 2019, 98, 122–133. [Google Scholar] [CrossRef]
- Yang, D.; Chae, Y.-J.; Kim, D.; Lim, Y.; Kim, D.H.; Kim, C.; Park, S.-K.; Nam, C. Effects of Social Behaviors of Robots in Privacy-Sensitive Situations. Int. J. Soc. Robot. 2021, 14, 589–602. [Google Scholar] [CrossRef]
- Babel, F.; Kraus, J.; Miller, L.; Kraus, M.; Wagner, N.; Minker, W.; Baumann, M. Small Talk with a Robot? The Impact of Dialog Content, Talk Initiative, and Gaze Behavior of a Social Robot on Trust, Acceptance, and Proximity. Int. J. Soc. Robot. 2021, 13, 1485–1498. [Google Scholar] [CrossRef]
- Fronemann, N.; Pollmann, K.; Loh, W. Should My Robot Know What’s Best for Me? Human–Robot Interaction between User Experience and Ethical Design. AI Soc. 2022, 37, 517–533. [Google Scholar] [CrossRef]
- Al-Emran, M.; Mezhuyev, V.; Kamaludin, A. Technology Acceptance Model in M-Learning Context: A Systematic Review. Comput. Educ. 2018, 125, 389–412. [Google Scholar] [CrossRef]
- Tan, H.; Li, J.; He, M.; Li, J.; Zhi, D.; Qin, F.; Zhang, C. Global Evolution of Research on Green Energy and Environmental Technologies: A Bibliometric Study. J. Environ. Manag. 2021, 297, 113382. [Google Scholar] [CrossRef]
- de Wit, J.; Vogt, P.; Krahmer, E. The Design and Observed Effects of Robot-Performed Manual Gestures: A Systematic Review. ACM Trans. Hum.-Robot Interact. 2023, 12, 1. [Google Scholar] [CrossRef]
- Robinson, N.; Tidd, B.; Campbell, D.; Kulić, D.; Corke, P. Robotic Vision for Human-Robot Interaction and Collaboration: A Survey and Systematic Review. ACM Trans. Hum.-Robot Interact. 2023, 12, 12. [Google Scholar] [CrossRef]
- Mahdi, H.; Akgun, S.A.; Saleh, S.; Dautenhahn, K. A Survey on the Design and Evolution of Social Robots—Past, Present and Future. Robot. Auton. Syst. 2022, 156, 104193. [Google Scholar] [CrossRef]
- Loveys, K.; Sebaratnam, G.; Sagar, M.; Broadbent, E. The Effect of Design Features on Relationship Quality with Embodied Conversational Agents: A Systematic Review. Int. J. Soc. Robot. 2020, 12, 1293–1312. [Google Scholar] [CrossRef]
- Lim, V.; Rooksby, M.; Cross, E.S. Social Robots on a Global Stage: Establishing a Role for Culture During Human–Robot Interaction. Int. J. Soc. Robot. 2021, 13, 1307–1333. [Google Scholar] [CrossRef]
- Stock-Homburg, R. Survey of Emotions in Human–Robot Interactions: Perspectives from Robotic Psychology on 20 Years of Research. Int. J. Soc. Robot. 2022, 14, 389–411. [Google Scholar] [CrossRef]
- Park, S.; Whang, M. Empathy in Human–Robot Interaction: Designing for Social Robots. Int. J. Environ. Res. Public Health 2022, 19, 1889. [Google Scholar] [CrossRef] [PubMed]
- Song, Y.; Luximon, Y. Trust in Ai Agent: A Systematic Review of Facial Anthropomorphic Trustworthiness for Social Robot Design. Sensors 2020, 20, 5087. [Google Scholar] [CrossRef] [PubMed]
- de Jong, C.; Peter, J.; Kühne, R.; Barco, A. Children’s Acceptance of Social Robots: A Narrative Review of the Research 2000–2017. Interact. Stud. 2019, 20, 393–425. [Google Scholar] [CrossRef]
- Gasteiger, N.; Loveys, K.; Law, M.; Broadbent, E. Friends from the Future: A Scoping Review of Research into Robots and Computer Agents to Combat Loneliness in Older People. Clin. Interv. Aging 2021, 16, 941–971. [Google Scholar] [CrossRef] [PubMed]
- Rasouli, S.; Gupta, G.; Nilsen, E.; Dautenhahn, K. Potential Applications of Social Robots in Robot-Assisted Interventions for Social Anxiety. Int. J. Soc. Robot. 2022, 14, 1–32. [Google Scholar] [CrossRef] [PubMed]
- Kabacińska, K.; Prescott, T.J.; Robillard, J.M. Socially Assistive Robots as Mental Health Interventions for Children: A Scoping Review. Int. J. Soc. Robot. 2021, 13, 919–935. [Google Scholar] [CrossRef]
- Abbasi, N.I.; Spitale, M.; Jones, P.B.; Gunes, H. Measuring Mental Wellbeing of Children Via Human-Robot Interaction: Challenges and Opportunities. Interact. Stud. 2022, 23, 157–203. [Google Scholar] [CrossRef]
- Liu, L.; Duffy, V.G. Exploring the Future Development of Artificial Intelligence (AI) Applications in Chatbots: A Bibliometric Analysis. Int. J. Soc. Robot. 2023, 15, 703–716. [Google Scholar] [CrossRef]
- Van Eck, N.J.; Waltman, L. Software Survey: Vosviewer, a Computer Program for Bibliometric Mapping. Scientometrics 2010, 84, 523–538. [Google Scholar] [CrossRef]
- Chen, C. Citespace Ii: Detecting and Visualizing Emerging Trends and Transient Patterns in Scientific Literature. J. Am. Soc. Inf. Sci. Technol. 2006, 57, 359–377. [Google Scholar] [CrossRef]
- Rheu, M.; Shin, J.Y.; Peng, W.; Huh-Yoo, J. Systematic Review: Trust-Building Factors and Implications for Conversational Agent Design. Int. J. Hum. –Comput. Interact. 2021, 37, 81–96. [Google Scholar] [CrossRef]
- Li, J.; Goerlandt, F.; Reniers, G.; Zhang, B. Sam Mannan and His Scientific Publications: A Life in Process Safety Research. J. Loss Prev. Process Ind. 2020, 66, 104140. [Google Scholar] [CrossRef]
- Achuthan, K.; Nair, V.K.; Kowalski, R.; Ramanathan, S.; Raman, R. Cyberbullying Research—Alignment to Sustainable Development and Impact of COVID-19: Bibliometrics and Science Mapping Analysis. Comput. Hum. Behav. 2023, 140, 107566. [Google Scholar] [CrossRef]
- Mongeon, P.; Paul-Hus, A. The Journal Coverage of Web of Science and Scopus: A Comparative Analysis. Scientometrics 2016, 106, 213–228. [Google Scholar] [CrossRef]
- Gobster, P.H. Mining the LANDscape: Themes and Trends over 40 Years of Landscape and Urban Planning; Elsevier: Amsterdam, The Netherlands, 2014; Volume 126, pp. 21–30. [Google Scholar]
- Kim, Y.W.; Kim, D.Y.; Ji, Y.G. Complexity in in-Vehicle Touchscreen Interaction: A Literature Review and Conceptual Framework. In Proceedings of the HCI in Mobility, Transport, and Automotive Systems. Automated Driving and In-Vehicle Experience Design: Second International Conference, MobiTAS 2020, Held as Part of the 22nd HCI International Conference, HCII 2020, Copenhagen, Denmark, 19–24 July 2020; Proceedings, Part I 22. Springer: Berlin/Heidelberg, Germany, 2020; pp. 289–297. [Google Scholar]
- Tan, H.; Sun, J.; Wenjia, W.; Zhu, C. User Experience & Usability of Driving: A Bibliometric Analysis of 2000–2019. Int. J. Hum. Comput. Interact. 2021, 37, 297–307. [Google Scholar]
- Dong, Y.; Li, D. Gender Representation in Textbooks: A Bibliometric Study. Scientometrics 2023, 128, 5969–6001. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Chen, J.; Chen, H. Identifying Interdisciplinary Topics and Their Evolution Based on Bertopic. Scientometrics 2023, 1–26. [Google Scholar] [CrossRef]
- Frey, B.J.; Dueck, D. Clustering by Passing Messages between Data Points. Science 2007, 315, 972–976. [Google Scholar] [CrossRef]
- Reeves, B.; Nass, C. The Media Equation: How People Treat Computers, Television, and New Media Like Real People; Cambridge University Press: Cambridge, UK, 1996; Volume 10, p. 236605. [Google Scholar]
- Song, Y.; Tao, D.; Luximon, Y. In Robot We Trust? The Effect of Emotional Expressions and Contextual Cues on Anthropomorphic Trustworthiness. Appl. Ergon. 2023, 109, 103967. [Google Scholar] [CrossRef]
- Nass, C.; Moon, Y. Machines and Mindlessness: Social Responses to Computers. J. Soc. Issues 2000, 56, 81–103. [Google Scholar] [CrossRef]
- Kirby, R.; Forlizzi, J.; Simmons, R. Affective Social Robots. Robot. Auton. Syst. 2010, 58, 322–332. [Google Scholar] [CrossRef]
- Benke, I.; Gnewuch, U.; Maedche, A. Understanding the Impact of Control Levels over Emotion-Aware Chatbots. Comput. Hum. Behav. 2022, 129, 107122. [Google Scholar] [CrossRef]
- Li, X.; Sung, Y. Anthropomorphism Brings Us Closer: The Mediating Role of Psychological Distance in User–Ai Assistant Interactions. Comput. Hum. Behav. 2021, 118, 106680. [Google Scholar] [CrossRef]
- Mende, M.; Scott, M.L.; van Doorn, J.; Grewal, D.; Shanks, I. Service Robots Rising: How Humanoid Robots Influence Service Experiences and Elicit Compensatory Consumer Responses. J. Mark. Res. 2019, 56, 535–556. [Google Scholar] [CrossRef]
- Liu, S.X.; Shen, Q.; Hancock, J. Can a Social Robot Be Too Warm or Too Competent? Older Chinese Adults’ Perceptions of Social Robots and Vulnerabilities. Comput. Hum. Behav. 2021, 125, 106942. [Google Scholar] [CrossRef]
- Bekey, G.A. Current Trends in Robotics: Technology and Ethics. In Robot Ethics: The Ethical and Social Implications of Robotics; MIT Press: Cambridge, MA, USA, 2012; pp. 17–34. [Google Scholar]
- Gnambs, T.; Appel, M. Are Robots Becoming Unpopular? Changes in Attitudes Towards Autonomous Robotic Systems in Europe. Comput. Hum. Behav. 2019, 93, 53–61. [Google Scholar] [CrossRef]
- Broadbent, E.; Tamagawa, R.; Patience, A.; Knock, B.; Kerse, N.; Day, K.; MacDonald, B.A. Attitudes Towards Health-Care Robots in a Retirement Village. Australas. J. Ageing 2012, 31, 115–120. [Google Scholar] [CrossRef]
- Lee, K.M.; Peng, W.; Jin, S.-A.; Yan, C. Can Robots Manifest Personality?: An Empirical Test of Personality Recognition, Social Responses, and Social Presence in Human–Robot Interaction. J. Commun. 2006, 56, 754–772. [Google Scholar] [CrossRef]
- Lutz, C.; Tamò, A.; Guzman, A. Communicating with Robots: Antalyzing the Interaction between Healthcare Robots and Humans with Regards to Privacy. In Human-Machine Communication: Rethinking Communication, Technology, and Ourselves; Peter Lang: New York, NY, USA, 2018; pp. 145–165. [Google Scholar]
- Breazeal, C. Emotion and Sociable Humanoid Robots. Int. J. Hum. Comput. Stud. 2003, 59, 119–155. [Google Scholar] [CrossRef]
- Dautenhahn, K. Socially Intelligent Robots: Dimensions of Human–Robot Interaction. Philos. Trans. R. Soc. B Biol. Sci. 2007, 362, 679–704. [Google Scholar] [CrossRef] [PubMed]
- Kontogiorgos, D.; Pereira, A.; Andersson, O.; Koivisto, M.; Gonzalez Rabal, E.; Vartiainen, V.; Gustafson, J. The Effects of Anthropomorphism and Non-Verbal Social Behaviour in Virtual Assistants. In Proceedings of the 19th ACM International Conference on Intelligent Virtual Agents, Paris, France, 2–5 July 2019; pp. 133–140. [Google Scholar]
- Davison, D.P.; Wijnen, F.M.; van der Meij, J.; Reidsma, D.; Evers, V. Designing a Social Robot to Support Children’s Inquiry Learning: A Contextual Analysis of Children Working Together at School. Int. J. Soc. Robot. 2020, 12, 883–907. [Google Scholar] [CrossRef]
- Guemghar, I.; Pires de Oliveira Padilha, P.; Abdel-Baki, A.; Jutras-Aswad, D.; Paquette, J.; Pomey, M.-P. Social Robot Interventions in Mental Health Care and Their Outcomes, Barriers, and Facilitators: Scoping Review. JMIR Ment. Health 2022, 9, e36094. [Google Scholar] [CrossRef] [PubMed]
- Pauw, L.S.; Sauter, D.A.; van Kleef, G.A.; Lucas, G.M.; Gratch, J.; Fischer, A.H. The Avatar Will See You Now: Support from a Virtual Human Provides Socio-Emotional Benefits. Comput. Hum. Behav. 2022, 136, 107368. [Google Scholar] [CrossRef]
- Zhang, Y.; Song, W.; Tan, Z.; Zhu, H.; Wang, Y.; Lam, C.M.; Weng, Y.; Hoi, S.P.; Lu, H.; Chan, B.S.M. Could Social Robots Facilitate Children with Autism Spectrum Disorders in Learning Distrust and Deception? Comput. Hum. Behav. 2019, 98, 140–149. [Google Scholar] [CrossRef]
- Schweinberger, S.R.; Pohl, M.; Winkler, P. Autistic Traits, Personality, and Evaluations of Humanoid Robots by Young and Older Adults. Comput. Hum. Behav. 2020, 106, 106256. [Google Scholar] [CrossRef]
- Bendig, E.; Erb, B.; Schulze-Thuesing, L.; Baumeister, H. The Next Generation: Chatbots in Clinical Psychology and Psychotherapy to Foster Mental Health—A Scoping Review. Verhaltenstherapie 2019, 29, 266–280. [Google Scholar] [CrossRef]
- David, D.; Matu, S.-A.; David, O.A. Robot-Based Psychotherapy: Concepts Development, State of the Art, and New Directions. Int. J. Cogn. Ther. 2014, 7, 192–210. [Google Scholar] [CrossRef]
- Riches, S.; Azevedo, L.; Vora, A.; Kaleva, I.; Taylor, L.; Guan, P.; Jeyarajaguru, P.; McIntosh, H.; Petrou, C.; Pisani, S. Therapeutic Engagement in Robot-Assisted Psychological Interventions: A Systematic Review. Clin. Psychol. Psychother. 2022, 29, 857–873. [Google Scholar] [CrossRef]
- De’Aira, G.B.; Xu, J.; Chen, Y.-P.; Howard, A. The Effect of Robot Vs. Human Corrective Feedback on Children’s Intrinsic Motivation. In Proceedings of the 2019 14th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Daegu, Republic of Korea, 11–14 March 2019; pp. 638–639. [Google Scholar]
- Zhang, A.; Rau, P.-L.P. Tools or Peers? Impacts of Anthropomorphism Level and Social Role on Emotional Attachment and Disclosure Tendency Towards Intelligent Agents. Comput. Hum. Behav. 2023, 138, 107415. [Google Scholar] [CrossRef]
- Wu, Y.-H.; Wrobel, J.; Cornuet, M.; Kerhervé, H.; Damnée, S.; Rigaud, A.-S. Acceptance of an Assistive Robot in Older Adults: A Mixed-Method Study of Human–Robot Interaction over a 1-Month Period in the Living Lab Setting. Clin. Interv. Aging 2014, 9, 801. [Google Scholar] [CrossRef] [PubMed]
- Morillo-Mendez, L.; Schrooten, M.G.; Loutfi, A.; Mozos, O.M. Age-Related Differences in the Perception of Robotic Referential Gaze in Human-Robot Interaction. Int. J. Soc. Robot. 2022, 1–13. [Google Scholar] [CrossRef]
- Asgharian, P.; Panchea, A.M.; Ferland, F. A Review on the Use of Mobile Service Robots in Elderly Care. Robotics 2022, 11, 127. [Google Scholar] [CrossRef]
- Fasola, J.; Mataric, M.J. Using Socially Assistive Human–Robot Interaction to Motivate Physical Exercise for Older Adults. Proc. IEEE 2012, 100, 2512–2526. [Google Scholar] [CrossRef]
- Akalin, N.; Kristoffersson, A.; Loutfi, A. Do You Feel Safe with Your Robot? Factors Influencing Perceived Safety in Human-Robot Interaction Based on Subjective and Objective Measures. Int. J. Hum.-Comput. Stud. 2022, 158, 102744. [Google Scholar] [CrossRef]
- Chew, E.; Khan, U.S.; Lee, P.H. Designing a Novel Robot Activist Model for Interactive Child Rights Education. Int. J. Soc. Robot. 2021, 13, 1641–1655. [Google Scholar] [CrossRef]
- Reich-Stiebert, N.; Eyssel, F.; Hohnemann, C. Exploring University Students’ Preferences for Educational Robot Design by Means of a User-Centered Design Approach. Int. J. Soc. Robot. 2020, 12, 227–237. [Google Scholar] [CrossRef]
- Konijn, E.A.; Hoorn, J.F. Robot Tutor and Pupils’ Educational Ability: Teaching the Times Tables. Comput. Educ. 2020, 157, 103970. [Google Scholar] [CrossRef]
- Kleinberg, J. Bursty and Hierarchical Structure in Streams. Data Min. Knowl. Discov. 2003, 7, 373–397. [Google Scholar] [CrossRef]
- Theodoraki, C.; Dana, L.-P.; Caputo, A. Building Sustainable Entrepreneurial Ecosystems: A Holistic Approach. J. Bus. Res. 2022, 140, 346–360. [Google Scholar] [CrossRef]
- Small, H. Co-Citation in the Scientific Literature: A New Measure of the Relationship between Two Documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Chen, C.; Ibekwe-SanJuan, F.; Hou, J. The Structure and Dynamics of Cocitation Clusters: A Multiple-Perspective Cocitation Analysis. J. Am. Soc. Inf. Sci. Technol. 2010, 61, 1386–1409. [Google Scholar] [CrossRef]
- Bartneck, C.; Kulić, D.; Croft, E.; Zoghbi, S. Measurement Instruments for the Anthropomorphism, Animacy, Likeability, Perceived Intelligence, and Perceived Safety of Robots. Int. J. Soc. Robot. 2009, 1, 71–81. [Google Scholar] [CrossRef]
- Riek, L.D. Wizard of Oz Studies in Hri: A Systematic Review and New Reporting Guidelines. J. Hum.-Robot Interact. 2012, 1, 119–136. [Google Scholar] [CrossRef]
- Russell, J.A. A Circumplex Model of Affect. J. Personal. Soc. Psychol. 1980, 39, 1161. [Google Scholar] [CrossRef]
- Kozima, H.; Michalowski, M.P.; Nakagawa, C. Keepon: A Playful Robot for Research, Therapy, and Entertainment. Int. J. Soc. Robot. 2009, 1, 3–18. [Google Scholar] [CrossRef]
- Robins, B.; Dautenhahn, K.; Boekhorst, R.T.; Billard, A. Robotic Assistants in Therapy and Education of Children with Autism: Can a Small Humanoid Robot Help Encourage Social Interaction Skills? Univers. Access Inf. Soc. 2005, 4, 105–120. [Google Scholar] [CrossRef]
- Kim, E.S.; Berkovits, L.D.; Bernier, E.P.; Leyzberg, D.; Shic, F.; Paul, R.; Scassellati, B. Social Robots as Embedded Reinforcers of Social Behavior in Children with Autism. J. Autism Dev. Disord. 2013, 43, 1038–1049. [Google Scholar] [CrossRef]
- Heerink, M.; Kröse, B.; Evers, V.; Wielinga, B. Assessing Acceptance of Assistive Social Agent Technology by Older Adults: The Almere Model. Int. J. Soc. Robot. 2010, 2, 361–375. [Google Scholar] [CrossRef]
- Wada, K.; Shibata, T. Living with Seal Robots—Its Sociopsychological and Physiological Influences on the Elderly at a Care House. IEEE Trans. Robot. 2007, 23, 972–980. [Google Scholar] [CrossRef]
- Fasola, J.; Matarić, M.J. A Socially Assistive Robot Exercise Coach for the Elderly. J. Hum.-Robot Interact. 2013, 2, 3–32. [Google Scholar] [CrossRef]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social Robots for Education: A Review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef] [PubMed]
- Kanda, T.; Hirano, T.; Eaton, D.; Ishiguro, H. Interactive Robots as Social Partners and Peer Tutors for Children: A Field Trial. Hum. Comput. Interact. 2004, 19, 61–84. [Google Scholar] [PubMed]
- Bartneck, C.; Forlizzi, J. A Design-Centred Framework for Social Human-Robot Interaction. In Proceedings of the RO-MAN 2004. 13th IEEE International Workshop on Robot and Human Interactive Communication (IEEE Catalog No. 04TH8759), Kurashiki, Japan, 22 September 2004; pp. 591–594. [Google Scholar]
- Aghimien, D.O.; Aigbavboa, C.O.; Oke, A.E.; Thwala, W.D. Mapping out Research Focus for Robotics and Automation Research in Construction-Related Studies: A Bibliometric Approach. J. Eng. Des. Technol. 2020, 18, 1063–1079. [Google Scholar] [CrossRef]
- Schäfermeier, B.; Hirth, J.; Hanika, T. Research Topic Flows in Co-Authorship Networks. Scientometrics 2023, 128, 5051–5078. [Google Scholar] [CrossRef]
- Bacci, S.; Bertaccini, B.; Petrucci, A. Insights from the Co-Authorship Network of the Italian Academic Statisticians. Scientometrics 2023, 128, 4269–4303. [Google Scholar] [CrossRef]
- Schmidt, F.L.; Hunter, J.E. Measurement Error in Psychological Research: Lessons from 26 Research Scenarios. Psychol. Methods 1996, 1, 199. [Google Scholar] [CrossRef]
- Smeds, K.; Wolters, F.; Rung, M. Estimation of Signal-to-Noise Ratios in Realistic Sound Scenarios. J. Am. Acad. Audiol. 2015, 26, 183–196. [Google Scholar] [CrossRef]
- Hancock, P.A.; Kessler, T.T.; Kaplan, A.D.; Brill, J.C.; Szalma, J.L. Evolving Trust in Robots: Specification through Sequential and Comparative Meta-Analyses. Hum. Factors 2021, 63, 1196–1229. [Google Scholar] [CrossRef]
- Lemaignan, S.; Edmunds, C.E.; Senft, E.; Belpaeme, T. The Pinsoro Dataset: Supporting the Data-Driven Study of Child-Child and Child-Robot Social Dynamics. PLoS ONE 2018, 13, e0205999. [Google Scholar] [CrossRef]
- McCartney, N.; Hicks, A.L.; Martin, J.; Webber, C.E. A Longitudinal Trial of Weight Training in the Elderly: Continued Improvements in Year 2. J. Gerontol. Ser. A Biol. Sci. Med. Sci. 1996, 51, B425–B433. [Google Scholar] [CrossRef] [PubMed]
- Pickut, B.A.; Van Hecke, W.; Kerckhofs, E.; Mariën, P.; Vanneste, S.; Cras, P.; Parizel, P.M. Mindfulness Based Intervention in Parkinson’s Disease Leads to Structural Brain Changes on Mri: A Randomized Controlled Longitudinal Trial. Clin. Neurol. Neurosurg. 2013, 115, 2419–2425. [Google Scholar] [CrossRef] [PubMed]
- van Straten, C.L.; Peter, J.; Kühne, R.; Barco, A. On Sharing and Caring: Investigating the Effects of a Robot’s Self-Disclosure and Question-Asking on Children’s Robot Perceptions and Child-Robot Relationship Formation. Comput. Hum. Behav. 2022, 129, 107135. [Google Scholar] [CrossRef]
- Holohan, M.; Fiske, A. “Like I’m Talking to a Real Person”: Exploring the Meaning of Transference for the Use and Design of Ai-Based Applications in Psychotherapy. Front. Psychol. 2021, 12, 720476. [Google Scholar] [CrossRef]
- Naneva, S.; Sarda Gou, M.; Webb, T.L.; Prescott, T.J. A Systematic Review of Attitudes, Anxiety, Acceptance, and Trust Towards Social Robots. Int. J. Soc. Robot. 2020, 12, 1179–1201. [Google Scholar] [CrossRef]
- Mehrabian, A.; Russell, J.A. An Approach to Environmental Psychology; MIT Press: Cambridge, MA, USA, 1974. [Google Scholar]
- Arora, R. Validation of an Sor Model for Situation, Enduring, and Response Components of Involvement. J. Mark. Res. 1982, 19, 505–516. [Google Scholar] [CrossRef]
- Cho, W.-C.; Lee, K.Y.; Yang, S.-B. What Makes You Feel Attached to Smartwatches? The Stimulus–Organism–Response (S–O–R) Perspectives. Inf. Technol. People 2019, 32, 319–343. [Google Scholar] [CrossRef]
- Kumari, P. How Does Interactivity Impact User Engagement over Mobile Bookkeeping Applications? J. Glob. Inf. Manag. JGIM 2021, 30, 1–16. [Google Scholar] [CrossRef]
- Park, J.; Choi, H.; Jung, Y. Users’ Cognitive and Affective Response to the Risk to Privacy from a Smart Speaker. Int. J. Hum. Comput. Interact. 2021, 37, 759–771. [Google Scholar] [CrossRef]
- Lutz, C.; Tamó-Larrieux, A. The Robot Privacy Paradox: Understanding How Privacy Concerns Shape Intentions to Use Social Robots. Hum.-Mach. Commun. 2020, 1, 87–111. [Google Scholar] [CrossRef]
- Giger, J.C.; Piçarra, N.; Alves-Oliveira, P.; Oliveira, R.; Arriaga, P. Humanization of Robots: Is It Really Such a Good Idea? Hum. Behav. Emerg. Technol. 2019, 1, 111–123. [Google Scholar] [CrossRef]
- Wang, Z.; Wang, J. Do the Emotions Evoked by Interface Design Factors Affect the User’s Intention to Continue Using the Smartwatch? The Mediating Role of Quality Perceptions. Int. J. Hum. Comput. Interact. 2023, 39, 546–561. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster | Cluster Label | Average Time | Keywords Number | Keywords |
|---|---|---|---|---|
| 1 (green) | Study of human–robot relationships in social robots | 2021 | 101 | Acceptance; anthropomorphism; attitude; trust; privacy; self-disclosure; TAM; warmth; transparency; |
| 2 (red) | Research on emotional design of social robots | 2019 | 60 | Affective computing; affective robotics; emotion; facial expression; body language; eeg; gaze; gesture recognition; |
| 3 (yellow) | Research on social robots for children’s psychotherapy | 2019 | 51 | Autism; therapy intervention; children; anxiety; training; social skills; spectrum disorder; games; speech |
| 4 (blue) | Research on companion robots for elderly rehabilitation | 2020 | 48 | Elderly; health-care; loneliness; mental health; assisted therapy; co-design; depression; user-centered design |
| 5 (purple) | Educational social robotics research | 2020 | 28 | Educational robot; performance; knowledge; teacher; classroom; child-robot interaction; empathy; interaction design |
| Ranking | Literature Source | Publisher | Citations | Number of Publications | Average Number of Citations |
|---|---|---|---|---|---|
| 1 | International Journal of Social Robotics | SPRINGER | 4010 | 184 | 21.793 |
| 2 | Computers in Human Behavior | ELSEVIER | 1268 | 39 | 32.512 |
| 3 | Frontiers in Psychology | FRONTIERS | 764 | 34 | 22.470 |
| 4 | International Journal of Human-Computer Studies | ELSEVIER | 734 | 22 | 33.363 |
| 5 | ACM/IEEE International Conference on Human-Robot Interaction (HRI2015) | ACM | 563 | 12 | 46.916 |
| 6 | International Journal of Contemporary Hospitality Management | EMERALD | 544 | 7 | 77.714 |
| 7 | Journal of The American Medical Directors Association | ELSEVIER | 440 | 4 | 110.034 |
| 8 | ACM/IEEE International Conference on Human-Robot Interaction (HRI2018) | ACM | 435 | 13 | 33.461 |
| 9 | Frontiers in Robotics and AI | FRONTIERS | 388 | 69 | 5.623 |
| 10 | ACM/IEEE International Conference on Human-Robot Interaction (HRI2019) | ACM | 363 | 30 | 12.021 |
| Ranking | Author | Institution | Number of Published Papers | Number of Citations | H Index |
|---|---|---|---|---|---|
| 1 | Paiva, Ana | Polytechnic University of Lisbon | 30 | 476 | 43 |
| 2 | Ishiguro, Hiroshi | Osaka University | 29 | 369 | 54 |
| 3 | Dautenhahn, Kerstin | University of Waterloo | 26 | 599 | 56 |
| 4 | Sabanovic, Selma | Indiana University | 24 | 237 | 32 |
| 5 | Guy Hoffman | Cornell University | 21 | 483 | 33 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Chen, Y.; Huo, S.; Mai, L.; Jia, F. Research Hotspots and Trends of Social Robot Interaction Design: A Bibliometric Analysis. Sensors 2023, 23, 9369. https://doi.org/10.3390/s23239369
Wang J, Chen Y, Huo S, Mai L, Jia F. Research Hotspots and Trends of Social Robot Interaction Design: A Bibliometric Analysis. Sensors. 2023; 23(23):9369. https://doi.org/10.3390/s23239369
Chicago/Turabian StyleWang, Jianmin, Yongkang Chen, Siguang Huo, Liya Mai, and Fusheng Jia. 2023. "Research Hotspots and Trends of Social Robot Interaction Design: A Bibliometric Analysis" Sensors 23, no. 23: 9369. https://doi.org/10.3390/s23239369
APA StyleWang, J., Chen, Y., Huo, S., Mai, L., & Jia, F. (2023). Research Hotspots and Trends of Social Robot Interaction Design: A Bibliometric Analysis. Sensors, 23(23), 9369. https://doi.org/10.3390/s23239369