


Optimizing Sensitivity in a Fluid-Structure Interaction-Based Microfluidic Viscometer: A Multiphysics Simulation Study


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Device Design
3. Materials and Methods
3.1. Multiphysics Modelling
3.2. Simulation Parameters
4. Results and Discussion
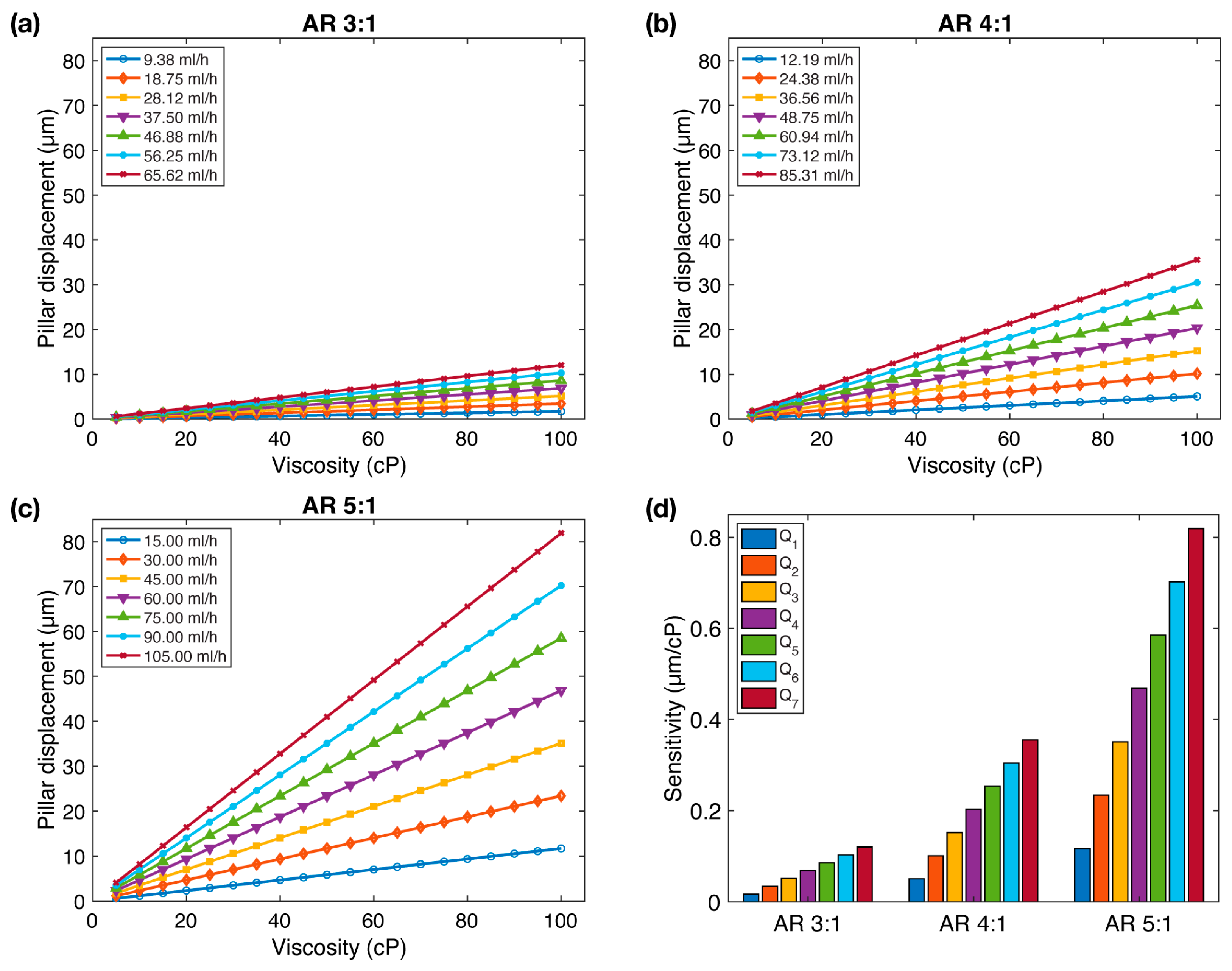
4.1. Pillar Aspect Ratio ()
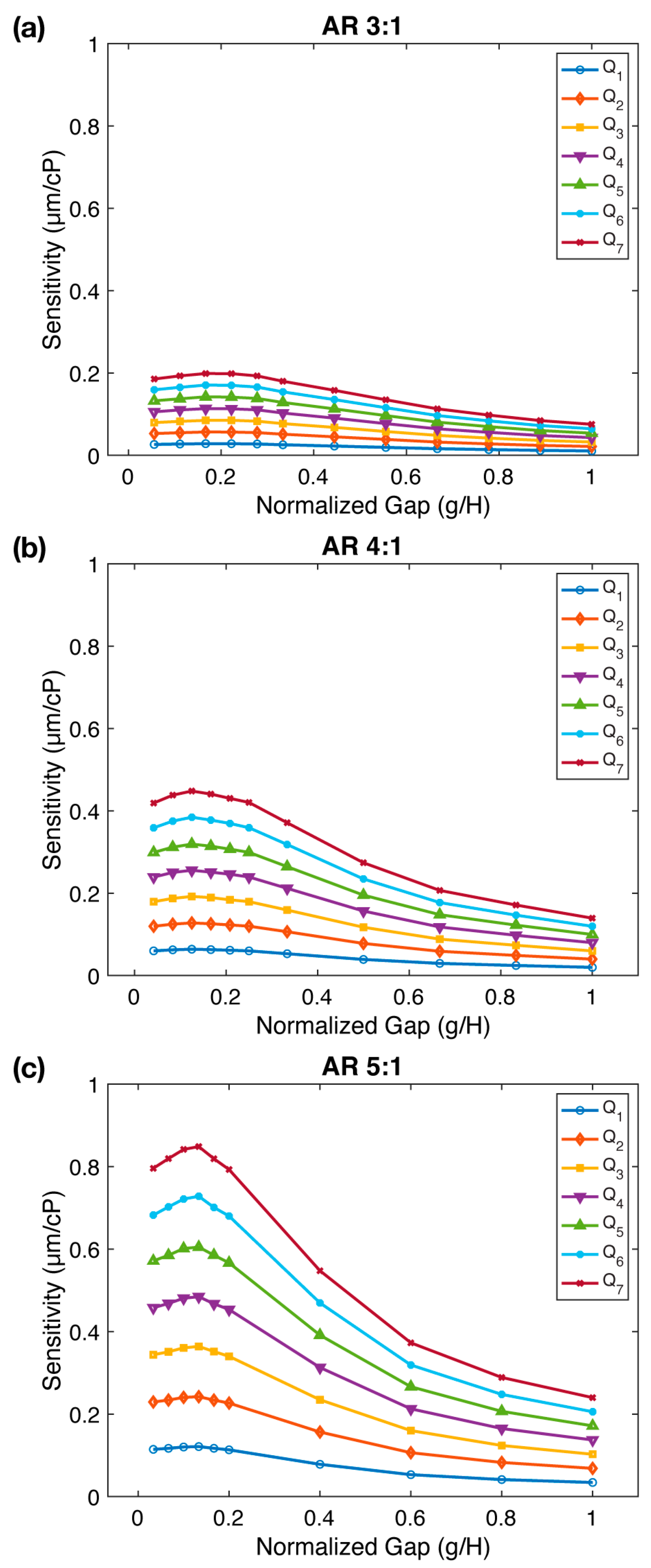
4.2. Gap between the Pillar Tip and Channel Ceiling ()
4.3. Channel Width ()
4.4. Pillar Spacing ()
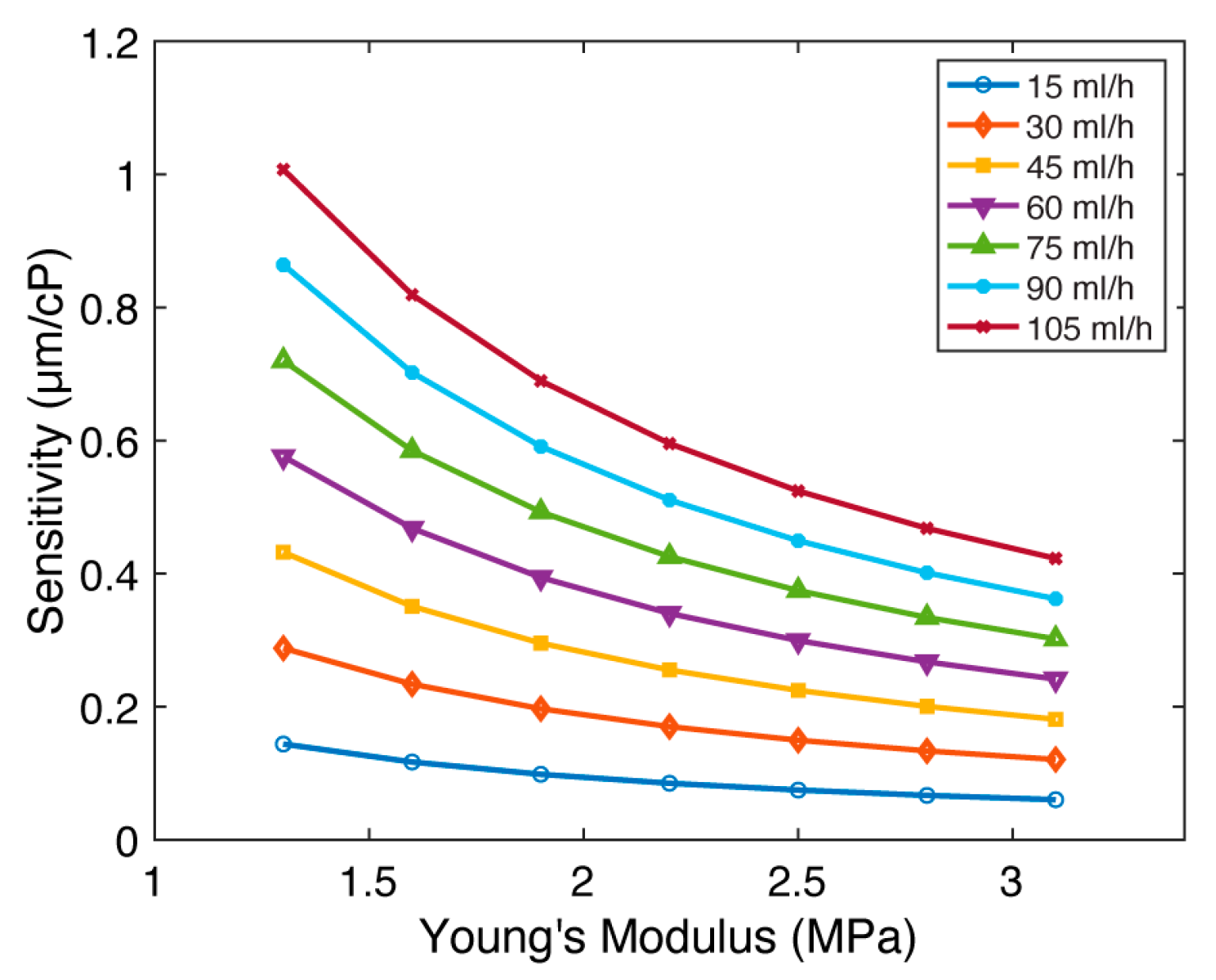
4.5. Young’s Modulus ()
5. Conclusions
- Aspect Ratio Enhancement: Our study demonstrated a substantial increase in sensitivity with aspect ratio. Consider employing micropillars with aspect ratios of 4:1 or higher, as these configurations exhibited notable sensitivity gains.
- Optimal gap between the micropillar tip and the channel ceiling: Maintaining a gap-to-pillar height ratio within not only maximizes sensitivity, but also ensures an accommodating gap size for facile and consistent device fabrication.
- Young’s modulus: While a low Young’s modulus enhances sensitivity, it is essential to consider the structural integrity of the micropillars and potential fabrication challenges when dealing with excessively low values.
- Channel Width Reduction: Decreasing the channel width enhances the sensitivity of the viscometer. Narrowing the cross-sectional area of the microchannel intensifies fluid-micropillar interactions.
- Pillar Spacing Expansion: Increasing the space between micropillars mitigates the shielding effect, fostering stronger fluid-micropillar interactions. Our investigation revealed a consistent sensitivity enhancement with increased pillar spacing.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nunes, J.K.; Stone, H.A. Introduction: Microfluidics. Chem. Rev. 2022, 122, 6919–6920. [Google Scholar] [CrossRef] [PubMed]
- Preetam, S.; Nahak, B.K.; Patra, S.; Toncu, D.C.; Park, S.; Syväjärvi, M.; Orive, G.; Tiwari, A. Emergence of microfluidics for next generation biomedical devices. Biosens. Bioelectron. X 2022, 10, 100106. [Google Scholar] [CrossRef]
- Pandey, C.M.; Augustine, S.; Kumar, S.; Kumar, S.; Nara, S.; Srivastava, S.; Malhotra, B.D. Microfluidics Based Point-of-Care Diagnostics. Biotechnol. J. 2018, 13, 1700047. [Google Scholar] [CrossRef]
- Beebe, D.J.; Mensing, G.A.; Walker, G.M. Physics and Applications of Microfluidics in Biology. Annu. Rev. Biomed. Eng. 2002, 4, 261–286. [Google Scholar] [CrossRef] [PubMed]
- Sonker, M.; Sahore, V.; Woolley, A.T. Recent advances in microfluidic sample preparation and separation techniques for molecular biomarker analysis: A critical review. Anal. Chim. Acta 2017, 986, 1–11. [Google Scholar] [CrossRef]
- Sonnen, K.F.; Merten, C.A. Microfluidics as an Emerging Precision Tool in Developmental Biology. Dev. Cell 2019, 48, 293–311. [Google Scholar] [CrossRef] [PubMed]
- Saez, J.; Catalan-Carrio, R.; Owens, R.M.; Basabe-Desmonts, L.; Benito-Lopez, F. Microfluidics and materials for smart water monitoring: A review. Anal. Chim. Acta 2021, 1186, 338392. [Google Scholar] [CrossRef]
- Marle, L.; Greenway, G.M. Microfluidic devices for environmental monitoring. TrAC Trends Anal. Chem. 2005, 24, 795–802. [Google Scholar] [CrossRef]
- Araz, M.K.; Tentori, A.M.; Herr, A.E. Microfluidic Multiplexing in Bioanalyses. SLAS Technol. 2013, 18, 350–366. [Google Scholar] [CrossRef]
- Li, X.; Zhou, Y. Microfluidic Devices for Biomedical Applications; Elsevier: Cham, Switzerland, 2021; p. 772. [Google Scholar]
- Sackmann, E.K.; Fulton, A.L.; Beebe, D.J. The present and future role of microfluidics in biomedical research. Nature 2014, 507, 181–189. [Google Scholar] [CrossRef]
- Wu, Q.; Liu, J.; Wang, X.; Feng, L.; Wu, J.; Zhu, X.; Wen, W.; Gong, X. Organ-on-a-chip: Recent breakthroughs and future prospects. BioMed. Eng. OnLine 2020, 19, 9. [Google Scholar] [CrossRef] [PubMed]
- Leung, C.M.; de Haan, P.; Ronaldson-Bouchard, K.; Kim, G.-A.; Ko, J.; Rho, H.S.; Chen, Z.; Habibovic, P.; Jeon, N.L.; Takayama, S.; et al. A guide to the organ-on-a-chip. Nat. Rev. Methods Primers 2022, 2, 33. [Google Scholar] [CrossRef]
- Maged, A.; Abdelbaset, R.; Mahmoud, A.A.; Elkasabgy, N.A. Merits and advances of microfluidics in the pharmaceutical field: Design technologies and future prospects. Drug Deliv. 2022, 29, 1549–1570. [Google Scholar] [CrossRef] [PubMed]
- Kumar Thimmaraju, M.; Trivedi, R.; Hemalatha, G.; Thirupathy, B.; Mohathasim Billah, A. Microfluidic revolution and its impact on pharmaceutical materials: A review. Mater. Today Proc. 2023. [Google Scholar] [CrossRef]
- Gunes, D.Z. Microfluidics for food science and engineering. Curr. Opin. Food Sci. 2018, 21, 57–65. [Google Scholar] [CrossRef]
- Peng, F.; Ke, Y.; Zhao, H.; Tang, Q.; Zhang, Z.; Bai, C. Application of microfluidic technology in oil industry—A new quick test method of fluid viscosity. IOP Conf. Ser. Mater. Sci. Eng. 2018, 452, 022040. [Google Scholar] [CrossRef]
- Lee, W.; Jerry, F. Applied Biofluid Mechanics, 1st ed.; McGraw-Hill Education: New York, NY, USA, 2007. [Google Scholar]
- Del Giudice, F. A Review of Microfluidic Devices for Rheological Characterisation. Micromachines 2022, 13, 167. [Google Scholar] [CrossRef]
- Gupta, S.; Wang, W.S.; Vanapalli, S.A. Microfluidic viscometers for shear rheology of complex fluids and biofluids. Biomicrofluidics 2016, 10, 043402. [Google Scholar] [CrossRef]
- Mustafa, A.; Eser, A.; Aksu, A.C.; Kiraz, A.; Tanyeri, M.; Erten, A.; Yalcin, O. A micropillar-based microfluidic viscometer for Newtonian and non-Newtonian fluids. Anal. Chim. Acta 2020, 1135, 107–115. [Google Scholar] [CrossRef]
- Mustafa, A.; Haider, D.; Barua, A.; Tanyeri, M.; Erten, A.; Yalcin, O. Machine learning based microfluidic sensing device for viscosity measurements. Sens. Diagn. 2023, 2, 1509–1520. [Google Scholar] [CrossRef]
- Temam, R. Navier-Stokes equations: Theory and Numerical Analysis; AMS Chelsea Pub.: Providence, RI, USA, 2001; 408p. [Google Scholar]
- Temam, R.; Miranville, A. Mathematical Modeling in Continuum Mechanics, 2nd ed.; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Ariati, R.; Sales, F.; Souza, A.; Lima, R.A.; Ribeiro, J. Polydimethylsiloxane Composites Characterization and Its Applications: A Review. Polymers 2021, 13, 4258. [Google Scholar] [CrossRef] [PubMed]
- Seghir, R.; Arscott, S. Extended PDMS stiffness range for flexible systems. Sens. Actuators A Phys. 2015, 230, 33–39. [Google Scholar] [CrossRef]
- Guerrero, B.; Lambert, M.F.; Chin, R.C. Transient behaviour of decelerating turbulent pipe flows. J. Fluid Mech. 2023, 962, A44. [Google Scholar] [CrossRef]
- Urbanowicz, K.; Bergant, A.; Stosiak, M.; Deptuła, A.; Karpenko, M. Navier-Stokes Solutions for Accelerating Pipe Flow—A Review of Analytical Models. Energies 2023, 16, 1407. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mustafa, A.; Ertas Uslu, M.; Tanyeri, M. Optimizing Sensitivity in a Fluid-Structure Interaction-Based Microfluidic Viscometer: A Multiphysics Simulation Study. Sensors 2023, 23, 9265. https://doi.org/10.3390/s23229265
Mustafa A, Ertas Uslu M, Tanyeri M. Optimizing Sensitivity in a Fluid-Structure Interaction-Based Microfluidic Viscometer: A Multiphysics Simulation Study. Sensors. 2023; 23(22):9265. https://doi.org/10.3390/s23229265
Chicago/Turabian StyleMustafa, Adil, Merve Ertas Uslu, and Melikhan Tanyeri. 2023. "Optimizing Sensitivity in a Fluid-Structure Interaction-Based Microfluidic Viscometer: A Multiphysics Simulation Study" Sensors 23, no. 22: 9265. https://doi.org/10.3390/s23229265
APA StyleMustafa, A., Ertas Uslu, M., & Tanyeri, M. (2023). Optimizing Sensitivity in a Fluid-Structure Interaction-Based Microfluidic Viscometer: A Multiphysics Simulation Study. Sensors, 23(22), 9265. https://doi.org/10.3390/s23229265