
An Optimal Integral Controller for Adaptive Optics Systems

Abstract
:1. Introduction
2. Adaptive Optics Systems
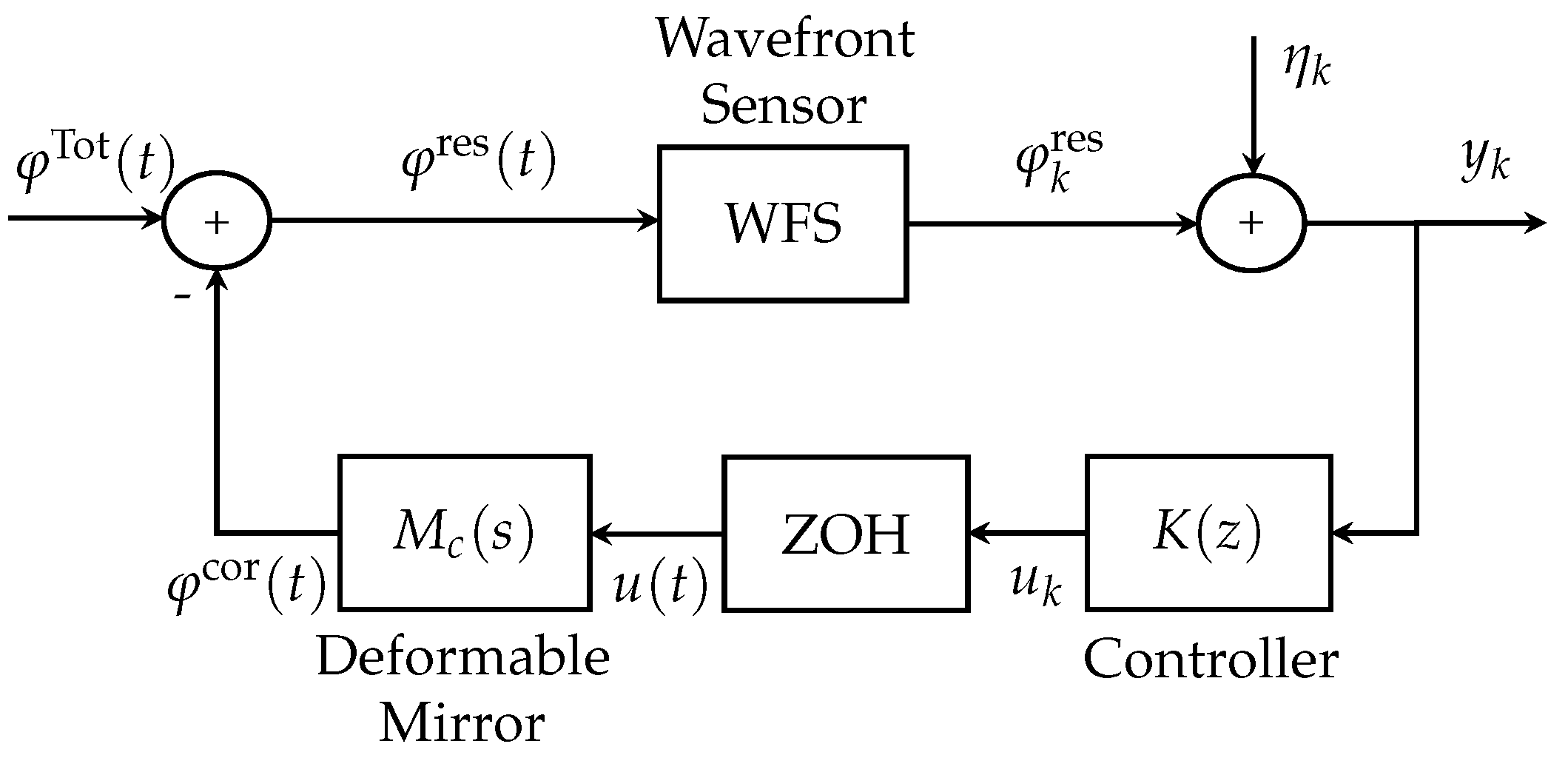
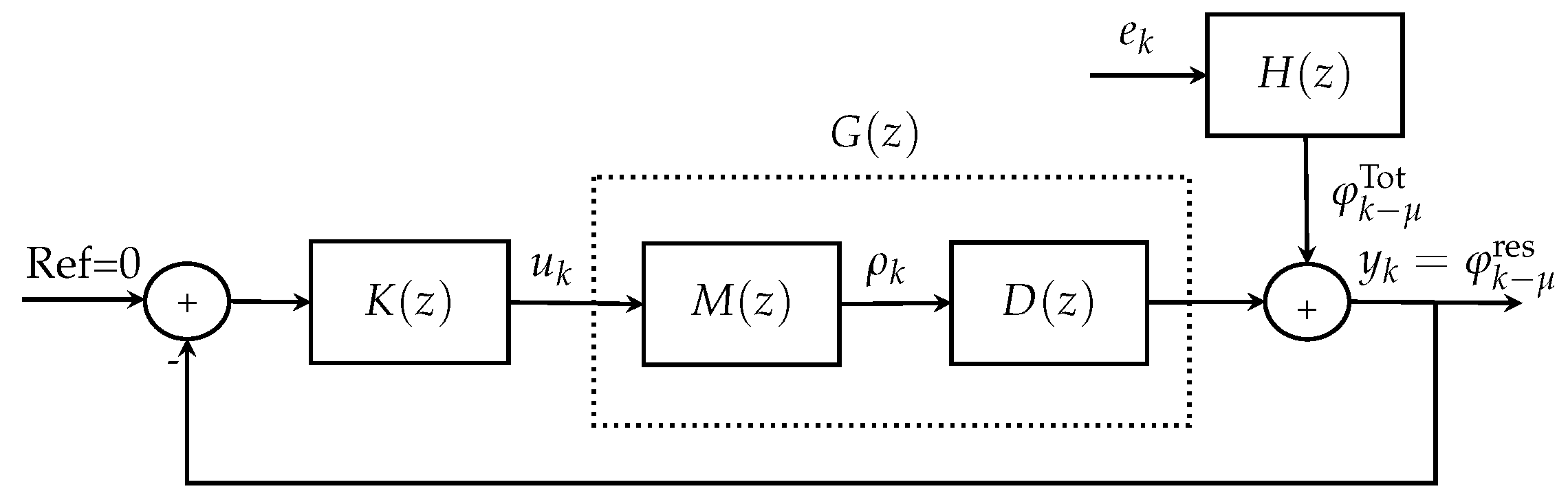
2.1. AO System Model
2.2. AO Controller
2.3. Disturbance Model
2.4. Identification in Frequency Domain
3. Proposed Method
4. Results and Discussion
4.1. Tuning Controller Example
4.2. Tuning a Controller for an Adaptive Optics System
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AO | Adaptive Optics |
| OOMAO | Object-Oriented Matlab Adaptive Optics |
| SH | Shark–Hartman |
| WFS | Wavefront Sensor |
| DM | Deformable Mirror |
| PSD | Power Spectral Density |
| DFT | Discrete Fourier Transform |
| FIR | Finite Impulse Response |
| ML | Maximum Likelihood |
| PI | Proportional Integral |
| ZOH | Zero-Order Hold |
| MVC | Minimum Variance Controller |
| RMS | Root Mean Square |
Appendix A. Lemma
Appendix B. Algorithm
| Algorithm A1 Discrete-time disturbance model |
|
References
- Tyson, R. Principles of Adaptive Optics, 4th ed.; Series in Optics and Optoelectronics; CRC Press: Boca Raton, FL, USA, 2016. [Google Scholar]
- Hayward, T.; Ripp, M.; Bonnet, H.; Cavedoni, C.; Galvez, R.; Gausachs, G.; Cho, M. Characterizing the vibration environments of the Gemini telescopes. Proc. SPIE 2016, 9906, 1956–1963. [Google Scholar]
- Guesalaga, A.; Neichel, B.; Rigaut, F.; Osborn, J.; Guzman, D. Comparison of vibration mitigation controllers for adaptive optics systems. Appl. Opt. 2012, 51, 4520–4535. [Google Scholar] [CrossRef] [PubMed]
- Garcés, J.; Zúñiga, S.; Close, L.; Males, J.; Morzinski, K.; Escárate, P.; Castro, M.; Marchioni, J.; Rojas, D. Vibrations in MagAO: Resonance sources identification and first approaches for modeling and control. Proc. SPIE 2016, 9909, 1079–1095. [Google Scholar]
- Zúñiga, S.; Garcés, J.; Close, L.; Males, J.; Morzinski, K.; Escárate, P.; Castro, M.; Marchioni, J.; Zagals, D.R. Vibrations in MagAO: Frequency-based analysis of on-sky data, resonance sources identification, and future challenges in vibrations mitigation. Proc. SPIE 2016, 9909, 1123–1128. [Google Scholar]
- Escárate, P.; Christou, J.; Rahmer, G.; Miller, D.; Hill, J. Understanding the vibration environment for LBT/AO. In Proceedings of the AO4ELT5 Conference, Tenerife, Spain, 25–30 June 2017. [Google Scholar]
- Guo, Y.; Zhong, L.; Min, L.; Wang, J.; Wu, Y.; Chen, K.; Wei, K.; Rao, C. Adaptive optics based on machine learning: A review. Opto-Electron. Adv. 2022, 5, 200082. [Google Scholar] [CrossRef]
- Van Kooten, M.A.M.; Jensen-Clem, R.M.; Cetre, S.; Ragland, S.; Bond, C.Z.; Fowler, J.; Wizinowich, P.L. Predictive wavefront control on Keck II adaptive optics bench: On-sky coronagraphic results. J. Astron. Telesc. Instrum. Syst. 2022, 8, 029006. [Google Scholar] [CrossRef]
- Kong, L.; Yang, K.; Su, C.; Guo, S.; Wang, S.; Cheng, T.; Yang, P. Adaptive Optics Tip-Tilt Correction Based on Smith Predictor and Filter-Optimized Linear Active Disturbance Rejection Control Method. Sensors 2023, 23, 6724. [Google Scholar] [CrossRef]
- Costa, V.; Beccaro, W. Benefits of Intelligent Fuzzy Controllers in Comparison to Classical Methods for Adaptive Optics. Photonics 2023, 10, 988. [Google Scholar] [CrossRef]
- Glück, M.; Pott, J.; Sawodny, O. Model predictive control of multi-Mirror adaptive optics systems. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 909–914. [Google Scholar]
- Haber, A.; Verhaegen, M. Modeling and state-space identification of deformable mirrors. Opt. Express 2020, 28, 4726–4740. [Google Scholar] [CrossRef]
- Mocci, J.; Quintavalla, M.; Chiuso, A.; Bonora, S.; Muradore, R. PI-shaped LQG control design for adaptive optics systems. Control. Eng. Pract. 2020, 102, 104528. [Google Scholar] [CrossRef]
- Kulcsár, C.; Raynaud, H.F.; Petit, C.; Conan, J.M.; de Lesegno, P.V. Optimal control, observers and integrators in adaptive optics. Opt. Express 2006, 14, 7464–7476. [Google Scholar] [CrossRef]
- Sedghi, B.; Müller, M.; Jakob, G. E-elt vibration modeling, simulation, and budgeting. In Proceedings of the Integrated Modeling of Complex Optomechanical Systems II; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 10012, p. 1001202. [Google Scholar]
- Sedghi, B.; Müller, M.; Dimmler, M. Analyzing the impact of vibrations on e-elt primary segmented mirror. In Proceedings of the Modeling, Systems Engineering, and Project Management for Astronomy VI; International Society for Optics and Photonics: Bellingham, WA, USA, 2016; Volume 9911, p. 991111. [Google Scholar]
- Conan, J.M.; Raynaud, H.F.; Kulcsár, C.; Meimon, S. Are integral controllers adapted to the new era of ELT adaptive optics? In Proceedings of the AO for ELT 2011—2nd International Conference on Adaptive Optics for Extremely Large Telescopes, Victoria, BC, Canada, 25–30 September 2011; p. 57. [Google Scholar]
- Sedghi, B.; Müller, M.; Bonnet, H.; Dimmler, M.; Bauvir, B. Field stabilization (tip/tilt control) of E-ELT. In Proceedings of the Ground-Based and Airborne Telescopes III; Stepp, L.M., Gilmozzi, R., Hall, H.J., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2010; Volume 7733, pp. 1402–1413. [Google Scholar]
- Rodriguez, I.; Neichel, B.; Guesalaga, A.; Rigaut, F.; Guzman, D. Kalman and H-infinity controllers for GeMS. In Proceedings of the Imaging and Applied Optics; Optical Society of America: Washington, DC, USA, 2011; p. JWA32. [Google Scholar]
- Juvénal, R.; Kulcsár, C.; Raynaud, H.; Conan, J.M.; Petit, C.; Leboulleux, L.; Sivo, G.; Garrel, V. Tip-tilt modelling and control for GeMS: A performance comparison of identification techniques. In Proceedings of the Adaptive Optics for Extremely Large Telescopes 4, Lake Arrowhead, CA, USA, 26–30 October 2015; Volume 1. [Google Scholar]
- Hafeez, R.; Archinuk, F.; Fabbro, S.; Teimoorinia, H.; Véran, J.P. Forecasting wavefront corrections in an adaptive optics system. J. Astron. Telesc. Instrum. Syst. 2022, 8, 029003. [Google Scholar] [CrossRef]
- Coronel, M.; Carvajal, R.; Escárate, P.; Agüero, J.C. Disturbance Modelling for Minimum Variance Control in Adaptive Optics Systems Using Wavefront Sensor Sampled-Data. Sensors 2021, 21, 3054. [Google Scholar] [CrossRef] [PubMed]
- Xu, Z.; Yang, P.; Hu, K.; Xu, B.; Li, H. Deep learning control model for adaptive optics systems. Appl. Opt. 2019, 58, 1998–2009. [Google Scholar] [CrossRef] [PubMed]
- Chen, B.; Zhou, Y.; Li, Z.; Jia, J.; Zhang, Y. Adaptive Optical Closed-Loop Control Based on the Single-Dimensional Perturbation Descent Algorithm. Sensors 2023, 23, 4371. [Google Scholar] [CrossRef]
- Shaffer, B.D.; Vorenberg, J.R.; Wilcox, C.C.; McDaniel, A.J. Generalizable turbulent flow forecasting for adaptive optics control. Appl. Opt. 2023, 62, G1–G11. [Google Scholar] [CrossRef]
- Goodwin, G.C.; Graebe, S.; Salgado, M. Control System Design, 1st ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2000. [Google Scholar]
- Conan, R.; Correia, C. Object-oriented Matlab adaptive optics toolbox. In Proceedings of the Adaptive Optics Systems IV; Marchetti, E., Close, L.M., Véran, J.P., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2014; Volume 9148, p. 91486C. [Google Scholar] [CrossRef]
- Petit, C.; Conan, J.M.; Kulcsár, C.; Raynaud, H.; Fusco, T. First laboratory validation of vibration filtering with LQG control law for adaptive optics. Opt. Express 2008, 16, 87–97. [Google Scholar] [CrossRef]
- Sivo, G.; Kulcsár, C.; Conan, J.M.; Raynaud, H.; Gendron, É.; Basden, A.; Vidal, F.; Morris, T.; Meimon, S.; Petit, C.; et al. First on-sky SCAO validation of full LQG control with vibration mitigation on the CANARY pathfinder. Opt. Express 2014, 22, 23565–23591. [Google Scholar] [CrossRef]
- Kubin, G.; Lainscsek, C.; Rank, E. Identification of nonlinear oscillator models for speech analysis and synthesis. In Nonlinear Speech Modeling and Applications: Advanced Lectures and Revised Selected Papers; Chollet, G., Esposito, A., Faundez-Zanuy, M., Marinaro, M., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 74–113. [Google Scholar]
- Escárate, P.; Carvajal, R.; Close, L.; Males, J.; Morzinski, K.; Agüero, J.C. Minimum variance control for mitigation of vibrations in adaptive optics systems. Appl. Opt. 2017, 56, 5388–5397. [Google Scholar] [CrossRef]
- Yang, K.; Yang, P.; Chen, S.; Wang, S.; Wen, L.; Dong, L.; He, X.; Lai, B.; Yu, X.; Xu, B. Vibration identification based on Levenberg–Marquardt optimization for mitigation in adaptive optics systems. Appl. Opt. 2018, 57, 2820–2826. [Google Scholar] [CrossRef]
- Söderström, T. Discrete-Time Stochastic Systems: Estimation and Control, 2nd ed.; Springer: Secaucus, NJ, USA, 2002. [Google Scholar]
- Ogata, K. Discrete-Time Control System, 2nd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 1995. [Google Scholar]
- Niu, K.; Tian, C. Zernike polynomials and their applications. J. Opt. 2022, 24, 123001. [Google Scholar] [CrossRef]
- Kulcsár, C.; Raynaud, H.F.; Petit, C.; Conan, J.M. Minimum variance prediction and control for adaptive optics. Automatica 2012, 48, 1939–1954. [Google Scholar] [CrossRef]
- Kulcsár, C.; Raynaud, H.; Conan, J.; Correia, C.; Petit, C. Control design and turbulent phase models in adaptive optics: A state-space interpretation. In Proceedings of the Frontiers in Optics 2009/Laser Science XXV/Fall 2009 OSA Optics & Photonics Technical Digest; Optical Society of America: Washington, DC, USA, 2009; p. AOWB1. [Google Scholar]
- Anderson, B.; Moore, J. Optimal Filtering; Prentice-Hall Information and System Sciences Series; Prentice-Hall: Upper Saddle River, NJ, USA, 1979. [Google Scholar]
- Hannan, E. Time Series Analysis; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1960. [Google Scholar]
- Pawitan, Y. Whittle Likelihood. In Encyclopedia of Statistical Sciences, 2nd ed.; Kotz, S., Balakrishnan, N., Read, C., Vidakovic, B., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2004; Volume 15, pp. 9136–9138. [Google Scholar]
- Palma, W. Long-Memory Time Series Theory and Methods; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2007. [Google Scholar]
- Agüero, J.C.; Yuz, J.; Goodwin, G.C.; Delgado, R. On the equivalence of time and frequency domain Maximum Likelihood estimation. Automatica 2010, 46, 260–270. [Google Scholar] [CrossRef]
- Åström, K.; Wittenmark, B. Computer-Controlled Systems Theory and Design, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1997. [Google Scholar]
- Kuo, B.C. Digital Control Systems, 2nd ed.; Oxford University Press: Oxford, UK, 1995. [Google Scholar]
- Åström, K.; Hägglun, T. PID Controllers: Theory, Design, and Tuning; Instrument Society of America: Pittsburgh, PA, USA, 1995. [Google Scholar]
- Busoni, L.; Esposito, S.; Rabien, S.; Haug, M.; Ziegleder, J.; Hölzl, G. Wavefront sensor for the Large Binocular Telescope laser guide star facility. In Proceedings of the Adaptive Optics Systems; Hubin, N., Max, C.E., Wizinowich, P.L., Eds.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 2008; Volume 7015, p. 701556. [Google Scholar] [CrossRef]
- IAC. The Intrinsic Seeing Quality at the WHT Site. 1998. Available online: https://www.ing.iac.es/Astronomy/development/hap/dimm.html#References (accessed on 1 October 2023).
- Tokovinin, A.; Travouillon, T. Model of optical turbulence profile at Cerro Pachón. Mon. Not. R. Astron. Soc. 2006, 365, 1235–1242. [Google Scholar] [CrossRef]
- Coronel, M.; Orellana, R.; Carvajal, R.; Escarate, P.; Aguero, J. An Identification Method for Stochastic Continuous-Time Disturbances in Adaptive Optics Systems. In Proceedings of the International Federation of Automatic Control, IFAC, Yokohama, Japan, 9–14 July 2023. [Google Scholar]
- The MathWorks Inc. Statistics and Machine Learning Toolbox, version 9.13.0 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022; Available online: https://www.mathworks.com/help/stats/index.html (accessed on 1 October 2023).


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Proposed Tuning | Ziegler-Nichols Tuning | |
|---|---|---|
| Variance | 30.18 | 411.91 |
| Parameter | Value | Unit |
|---|---|---|
| Diameter D | 8.4 | m |
| Shack-Hartmann WFS | 10 × 10 | Lenslets |
| Deformable Mirror | 11 × 11 | Number Actuators |
| Zernike Modes | 100 | - |
| Wavelenght | 550 | nm |
| Fried | 14–20 | cm |
| Windspeed | 15 | m/s |
| Outer scale | 20 | m |
| Sampling Time | 0.001 | s |
| Simulation Time | 3 | s |
| Fried Parameter | Manual Tuning | Ziegler-Nichols Tuning | Proposed Tuning |
|---|---|---|---|
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Escárate, P.; Coronel, M.; Carvajal, R.; Agüero, J.C. An Optimal Integral Controller for Adaptive Optics Systems. Sensors 2023, 23, 9186. https://doi.org/10.3390/s23229186
Escárate P, Coronel M, Carvajal R, Agüero JC. An Optimal Integral Controller for Adaptive Optics Systems. Sensors. 2023; 23(22):9186. https://doi.org/10.3390/s23229186
Chicago/Turabian StyleEscárate, Pedro, María Coronel, Rodrigo Carvajal, and Juan C. Agüero. 2023. "An Optimal Integral Controller for Adaptive Optics Systems" Sensors 23, no. 22: 9186. https://doi.org/10.3390/s23229186
APA StyleEscárate, P., Coronel, M., Carvajal, R., & Agüero, J. C. (2023). An Optimal Integral Controller for Adaptive Optics Systems. Sensors, 23(22), 9186. https://doi.org/10.3390/s23229186