3.1. Driving Intention Recognition Process of TSWHMM
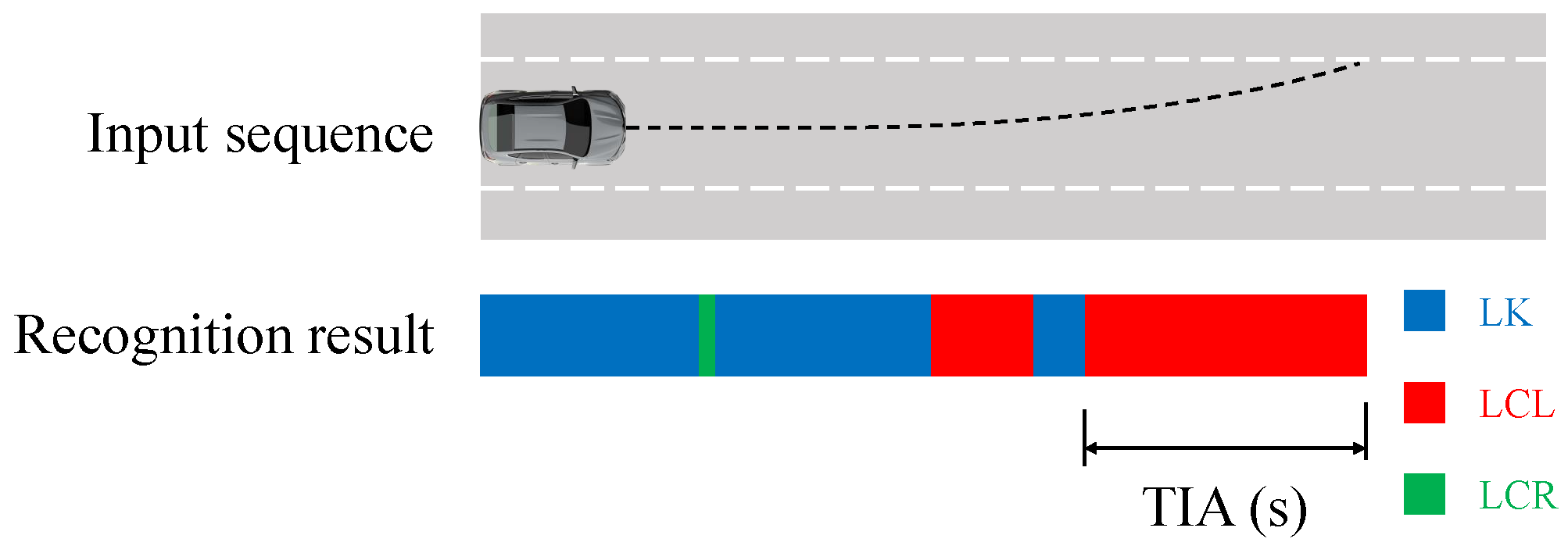
The process of driving intention recognition through TSWHMM is shown in
Figure 3. The input observation sequence
is first determined based on the size of the time window
, where
represents the current momentary observation data. After receiving the observation sequence, TSWHMM assigns weight coefficients in temporal order, emphasizing data closer to the current moment as more important. The trained behavioral models, namely
,
, and
, then compute the observation sequence probability with temporal weights, denoted as
, respectively. Finally, the driving intention of the model with the highest probability is recognized as the current moment’s result. If there are two or more models with the highest probability, the result from the previous moment is chosen as the current moment’s result. This process is repeated for each subsequent moment until completion.
The observation data
comprises the variables listed in
Table 1. Among them,
,
,
, and
are readily accessible vehicle state variables, while the lane hazard factor
quantifies the level of danger for the target vehicle in each lane. They are mathematically defined as follows:
where
. The meanings of the parameters in (
1) and (
2) are shown in
Table 2. A road-based reference coordinate system is established with the road’s centerline as the x-axis and its vertical direction as the y-axis. As indicated by (
2), when the
is negative, it signifies the absence of any risk of collision between two vehicles. To facilitate model training, all negative values are uniformly assigned a value of 0. Additionally, since the
values may tend to infinity, which again may adversely affect the training of the model, the upper limit of the parameter
is restricted to a finite value to indicate the absolute degree of danger. If there is no lane on one side of the target vehicle, the corresponding
can be set to
a to indicate absolute danger (no possibility of changing lanes to that side).
It should be noted that the lane hazard factor, as a newly defined observation variable, is not exclusive to TSWHMM. Any model can incorporate this variable as one of its inputs. In subsequent comparative experiments, this variable is incorporated into the input sets, except in the case of the roundabout experiments.
3.2. Difference between HMM and TSWHMM
The parameters of TSWHMM are denoted as . Compared to the HMM parameters , TSWHMM includes an additional discount factor to adjust the temporal weights of the observation sequence. The algorithm employed to estimate the parameters , and aligns with that of the HMM. However, serves as a model hyperparameter without a direct estimation formula, and must be determined based on either practical needs or optimization benchmarks (e.g., the accuracy of the test set). In this study, an optimization search was conducted over a series of discrete values for to determine its optimal value.
Instead of calculating the observation sequence probability , TSWHMM computes the observation sequence probability that considers the temporal weights, which are controlled by . This is the major difference between HMM and TSWHMM.
3.3. Principle of TSWHMM
In this section, the formula of TSWHMM for calculating will be derived from HMM, and the advantages of TSWHMM in the intention recognition problem will be illustrated at the same time.
The graphical structure of HMM for generating the observation sequence is shown in
Figure 4. First, the model generates the initial state
controlled by
, where
N is the number of states, and
. Then, the complete hidden state sequence
is generated according to the state transition matrix
, where
,
. Finally, the observation sequence
is determined based on
and
. In this paper, Gaussian mixture models (GMM) are used to fit the observation probability:
where
M is the number of Gaussian components;
is the mixing coefficient of the
mth Gaussian component under state
i, satisfying the constraint
. So, we have
.
Therefore, given the HMM parameters
and observation sequence
, the observation sequence probability
can be written as:
which means that
is equal to the sum of
over all possible hidden state sequences
.
Assuming that one possible hidden state sequence is
, the joint probability distribution of the observation sequence
and the hidden state sequence
under the given model
is
If we set:
and combining (
5)–(
7), we get:
taking the logarithm:
where
denotes the probability that at moment
the state is
and the observation is
;
denotes the probability that given
, the state at moment
t is
and the observation is
.
Equation (
9) demonstrates that, under specific constraints, the logarithm of the joint probability distribution of
and
,
, can be obtained by summing the logarithm of the generation probability of the observation,
, at each time step
t. However, in the context of intention recognition, the importance of observations increases as they get closer to the current time. The closer the observations are to the current moment
T, the more accurately they reflect the driving intention of the vehicle. Therefore, the importance of
varies. To better address the actual problem, the weight of observations closer to the current moment should be increased by adjusting their significance within the sequence.
Considering the input as a time-ordered sequence, we assign an exponentially time-dependent weight factor
to
:
where
is the discount factor and falls within the range
;
is the joint probability distribution considering the temporal weights. This approach is inspired by the discount factor utilized in reinforcement learning. The factor
ensures that the weight of
of the current moment remains 1, while the weight assigned to earlier moments increases exponentially as we approach the current moment. With this method, the likelihood of the model representing the true driving intention is significantly increased, thus improving the final result.
While this conclusion is based on a single hidden state sequence
, it is evident from (
4) that
is the sum of
across all possible hidden state sequences. Hence, the conclusion remains valid for
. Therefore, the probability of an observation sequence considering the temporal weights, is:
When the
cannot be calculated directly from (
11), we refer to the forward algorithm [
38] to solve it. Since (
10) is a power operation on the joint distribution probabilities at each time step (note that the discount factor
is multiplied by the joint probability after taking the logarithm) and operates consistently for all hidden state paths
(
is only related to
t), it is straightforward to write the recursive equation for
with the help of a forward algorithm as follows:
Recursion:
where
.
It is important to note that when , the TSWHMM simplifies to a classical HMM. This characteristic allows us to investigate the influence of on the intention recognition problem, further highlighting the flexibility of TSWHMM.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}