
Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing


Abstract
:1. Introduction
2. Overview of Robot Systems
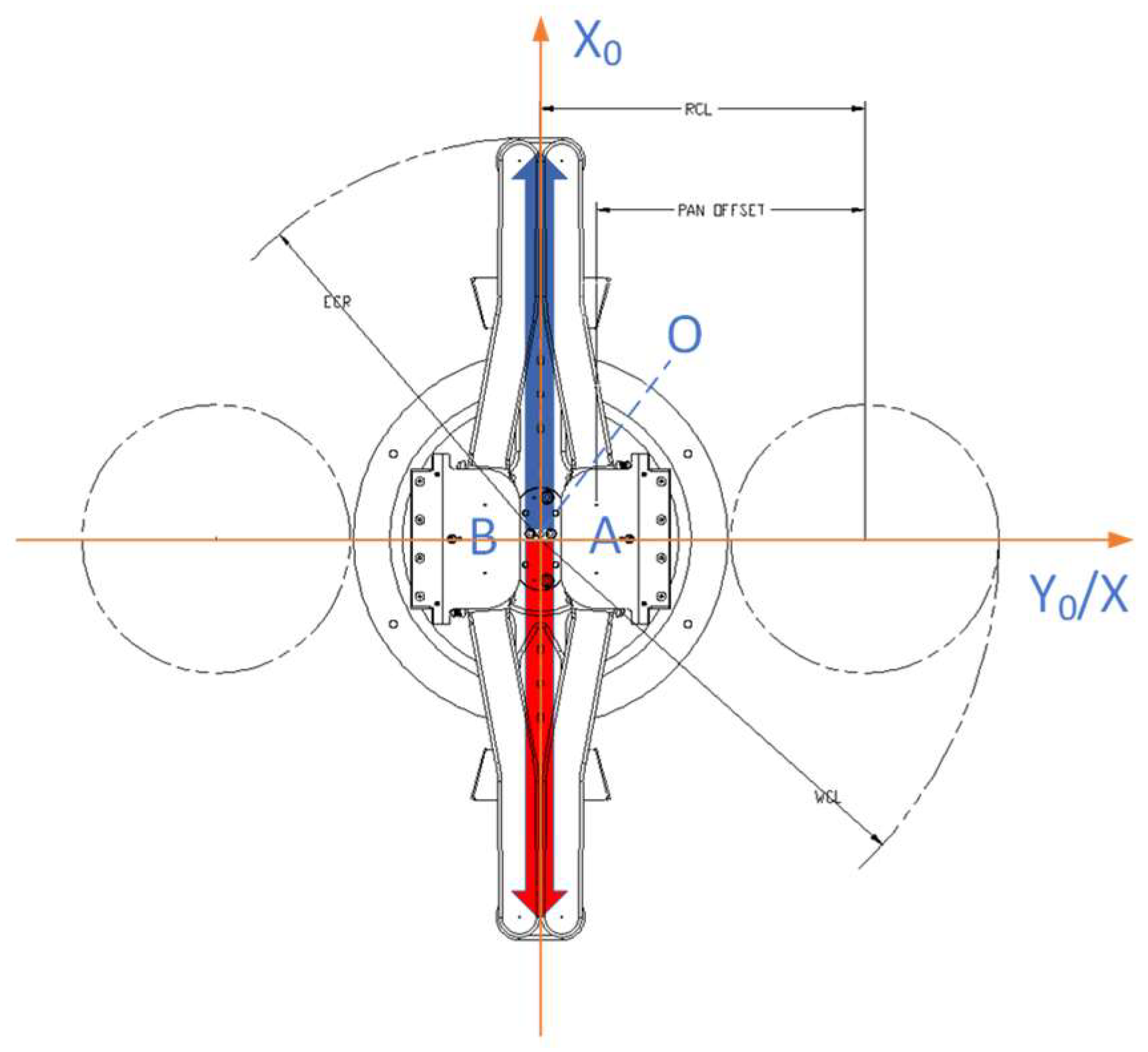
2.1. Mechanical Parameters
- The rotational motion of the robot is synthesized by the rotational motion of the connecting rods L and R at the same angular velocity, and the included angle between the connecting rod L and the connecting rod R remains unchanged at this time;
- The telescopic motion of the robot in a fixed position is composed of the rotational motion of the links L and R in opposite directions and at the same angular velocity. At this point, the arithmetic mean of the azimuth angles of the L and R links remains unchanged.
- When the angular rates of the L and R robot links are different, whether the direction of rotation is the same or not, macroscopically, it is reflected that the manipulator rotates while stretching.
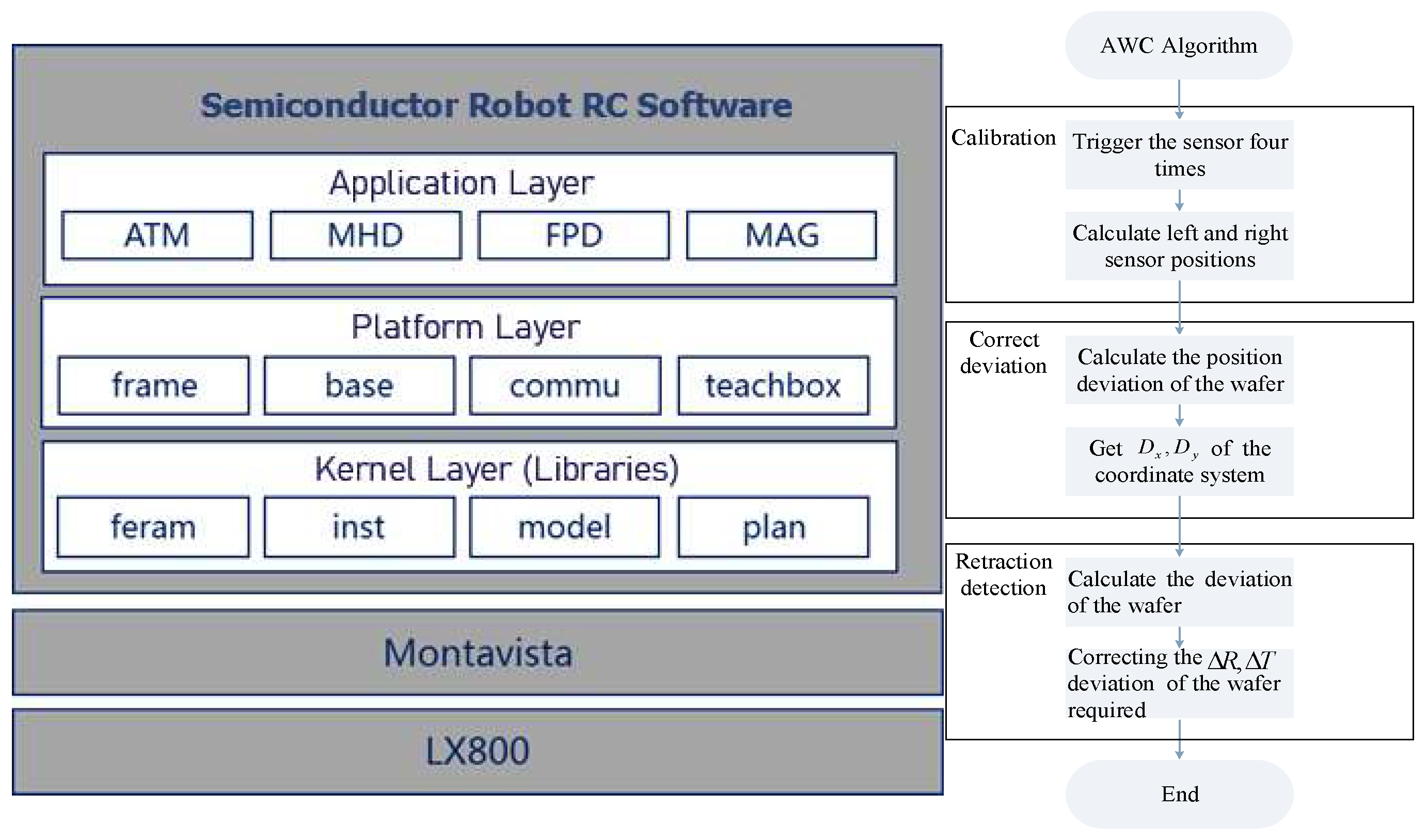
2.2. Software Architecture
- The kernel layer (library) is the RC (robot controller) general algorithm library, including FERAM (ferroelectric library), INST (instruction library), MODEL (model library), PLAN (planning library) and AWC (deviation correction algorithm).
- The platform layer is RC general software architecture, which is related to the RC system composition, including the FRAME library, BASE library, COMMU library, and TEACHBOX library.
- The application layer is the RC robot application system, including an atmospheric robot ATM, large load machine MHD, FPD, direct drive robot MAG and so on.
- Direct-drive robot application, mainly clean direct-drive robot application functions, including an application interface display, communication with the host computer, application instructions, application model, power-up logic of the application and other functions.
3. Motion Control of Handling Robot
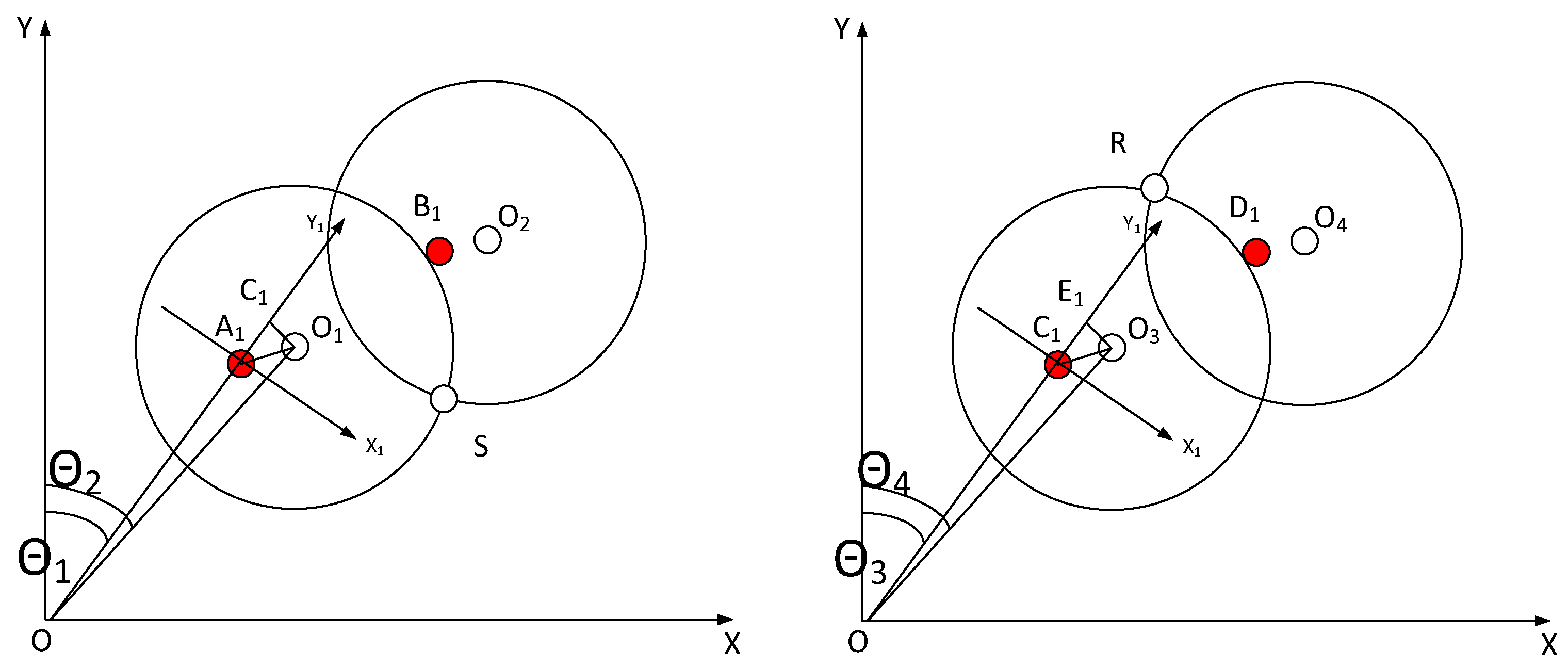
3.1. Establishment of Polar Coordinate System for Handling Robot
3.2. Geometric Forward Kinematics (Joint Coordinates to Polar Coordinates)
4. Automatic Wafer Alignment
4.1. Calibrated NOTCH Point Filtering
- Four. If NOTCH is present among the four, report an error. Otherwise, calculate the AWC deviation normally.
- Five. If NOTCH is present among the five, report an error. After that, determine if the 4th and 5th trigger points may be located at NOTCH, and report an error if they may be located there. If NOTCH is absent or the trigger points are not located at NOTCH, discard the 5th point and use the first 4 points for AWC deviation calculation.
- Six and above. For values 6 and above, exclude all departure points except for the first six. Then, check if each set of three consecutive points is activated by crossing NOTCH. If so, eliminate the data from those three points and use the remaining three points for calculating AWC deviation.
- Three and below. If the value is 3 or lower, there are not enough collection points for AWC calculation, and an error will be reported.
4.2. Sensor Calibration
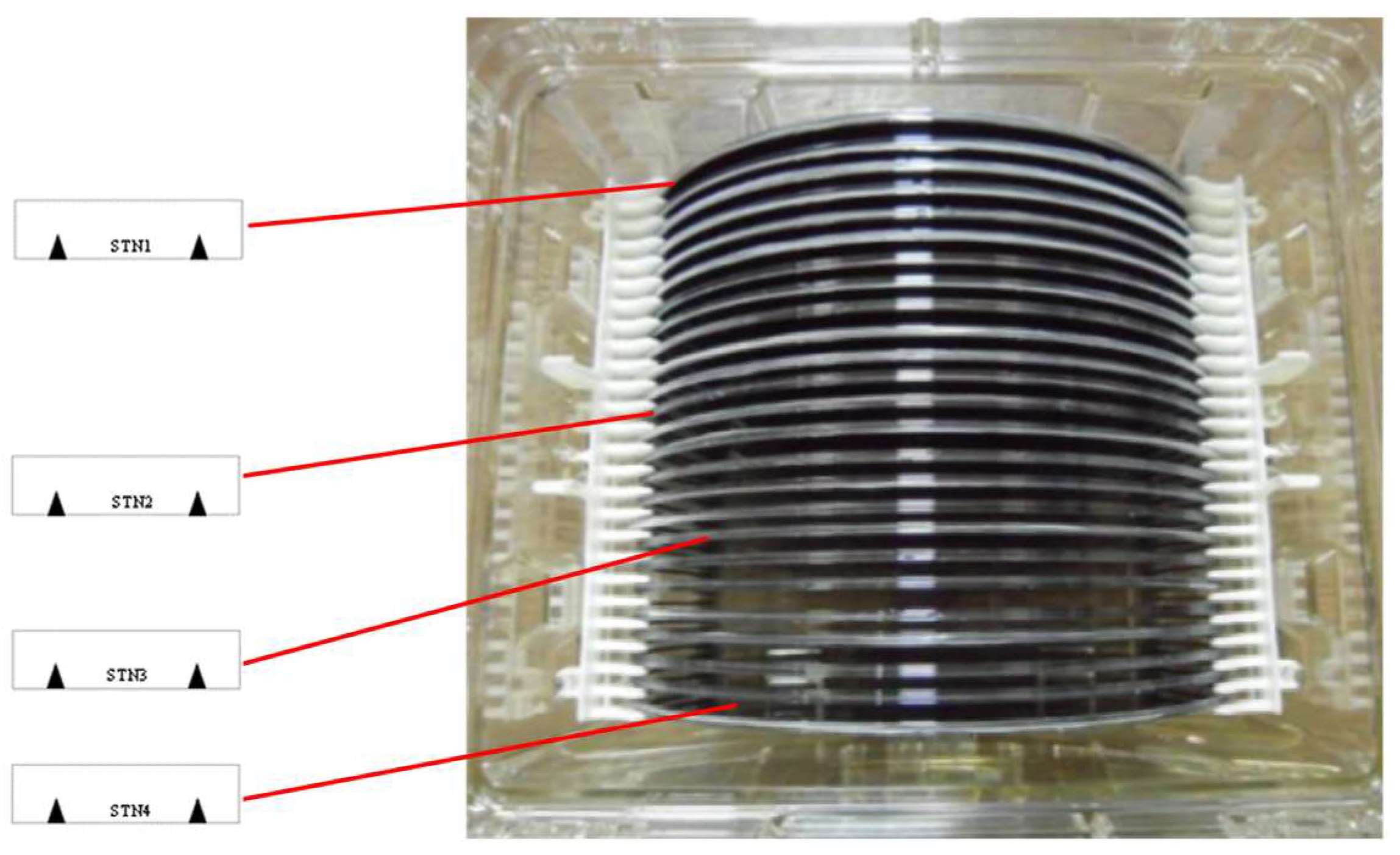
- Select the workstation and place the wafer in the center of the manipulator, making sure that the center of the wafer and the center of the manipulator coincide.
- Control the robot and move the edge of the wafer to trigger the sensors four times in this sequence: the left sensor retracts twice and the right sensor retracts twice as the robot moves to the edge of the workstation.

4.3. Generalized Inverse Method Correction for Least Squares
4.3.1. Calculation of Wafer Deviation in Finger Coordinate System

4.3.2. Generalized Inverse Method for Least Squares Solutions of Systems of Nonlinear Equations
4.4. Retraction Detection
5. Experimental Results and Analysis
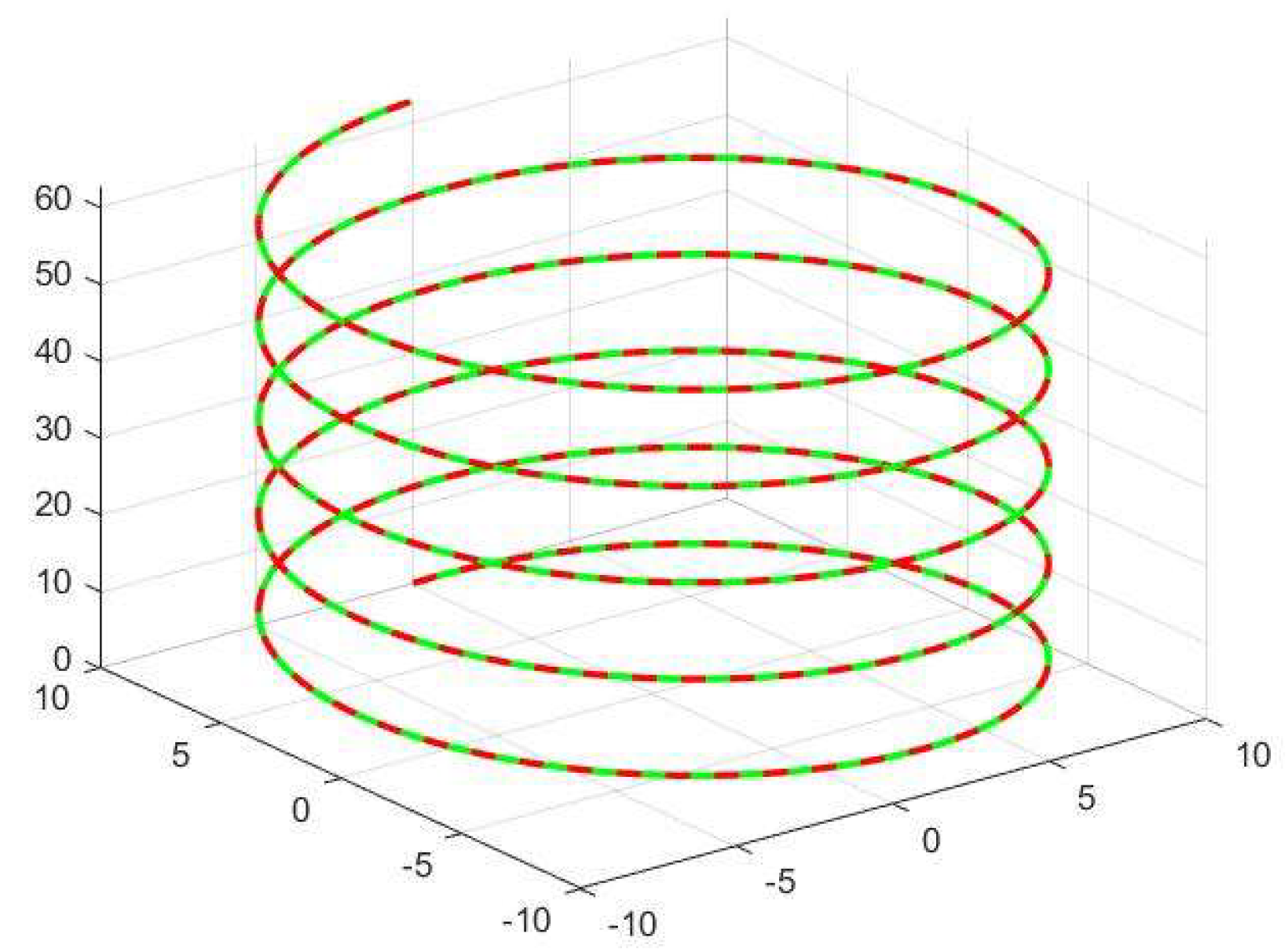
5.1. Motion Control Experiment
5.2. Automatic Wafer Alignment Calibration Correction Experiment
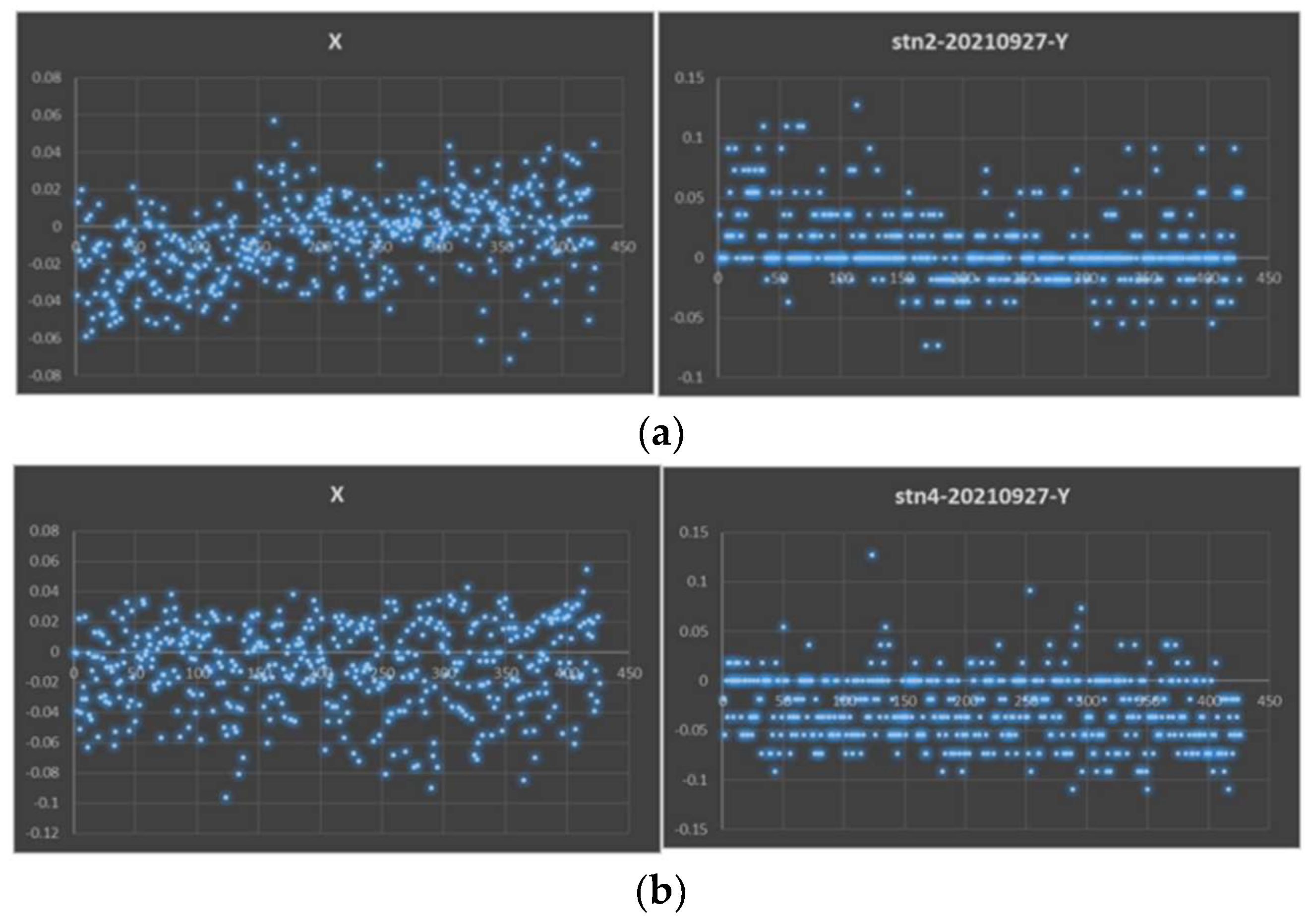
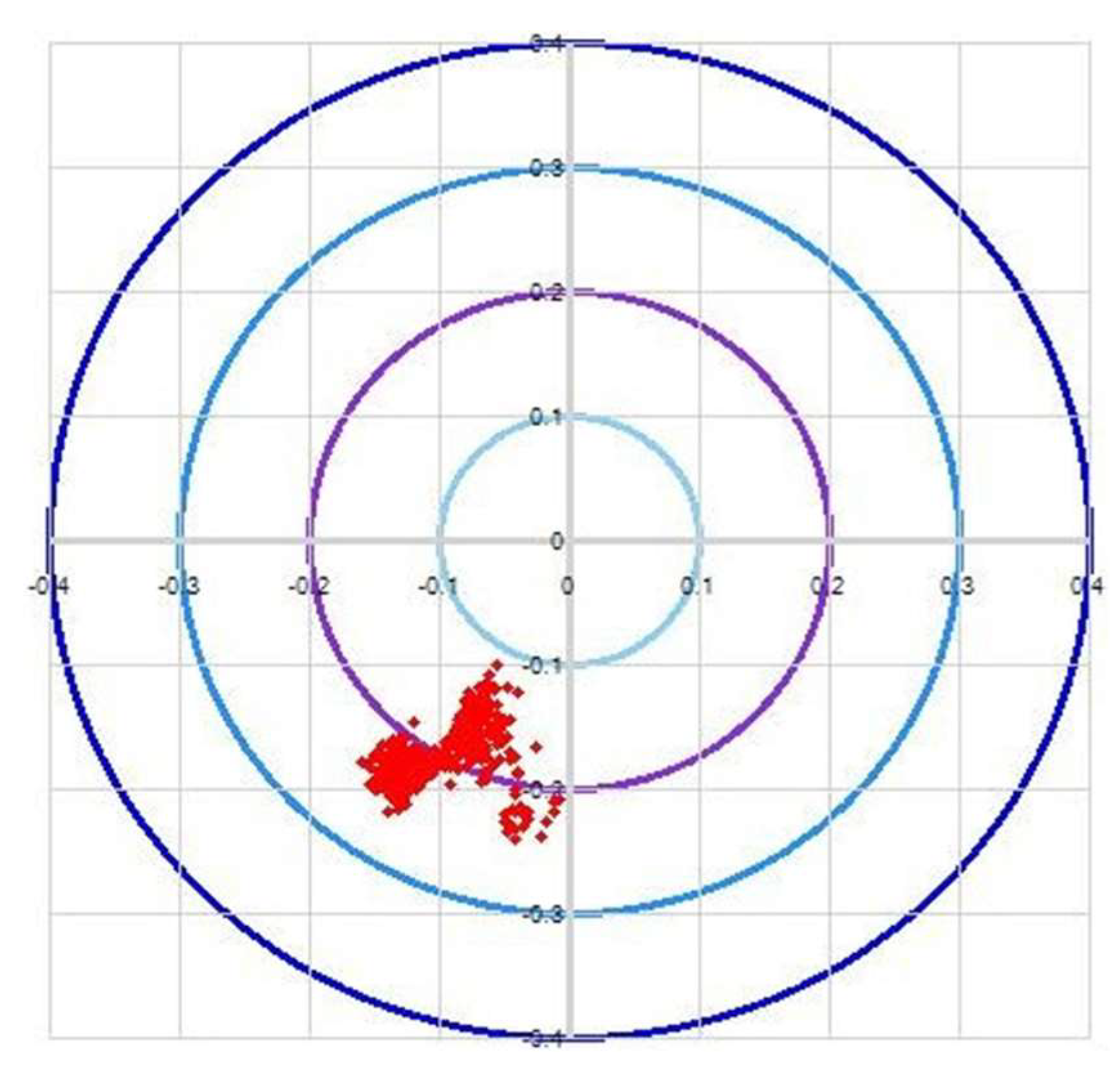
5.3. Cyclic Automatic Wafer Alignment Error Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, D.M. Research on Control Method of Vacuum Manipulator. Ph.D. Thesis, Shenyang Institute of Automation, Chinese Academy of Sciences, Beijing, China, 2007. [Google Scholar]
- Zhu, Q.H.; Wu, N.Q.; Teng, S.H. Petri net modeling and deadlock analysis of multi-assembly devices in semiconductor manufacturing. J. Southeast Univ. 2010, 40, 267–271. [Google Scholar]
- Li, X.; Zhou, B.H.; Lu, Z.Q. Real-time scheduling algorithm for semiconductor wafer etching system based on resident constraint. J. Shanghai Jiaotong Univ. 2009, 43, 1742–1745+1750. [Google Scholar]
- Wang, W.Z. Research on Some Problems of Silicon Wafer Handling Robot Applied to EFEM Module. Ph.D. Thesis, Northeastern University, Boston, MA, USA, 2012. [Google Scholar]
- Bormanis, O.; Ribickis, L. Power Module Temperature in Simulation of Robotic Manufacturing Application. Latv. J. Phys. Tech. Sci. 2021, 58, 3–14. [Google Scholar] [CrossRef]
- Yang, F.; Tang, X.; Wu, N. Wafer Residency Time Analysis for Time-Constrained Single-Robot-Arm Cluster Tools with Activity Time Variation. IEEE Trans. Control Syst. Technol. 2020, 28, 1177–1188. [Google Scholar] [CrossRef]
- Gao, S.; Xu, L.J. 6-SPS Parallel Robot Dynamics Analytical Model. J. Sichuan Union Univ. 1998, 2, 34–39. [Google Scholar]
- Hua, N.; Li, H.Y.; Wang, Y.J.; Sui, M.S. Processing technology of quartz glass wafer. Infrared Laser Eng. 2016, 45, 101–105. [Google Scholar]
- Xion, W.; Pan, C.; Qiao, Y. Reducing Wafer Delay Time by Robot Idle Time Regulation for Single-Arm Cluster Tools. IEEE Trans. Autom. Sci. Eng. 2021, 18, 1653–1667. [Google Scholar] [CrossRef]
- Nag, S.; Makwana, D.; Sai, C.T.R. WaferSegClassNet—A light-weight network for classification and segmentation of semiconductor wafer defects. Comput. Ind. 2022, 142, 103720. [Google Scholar] [CrossRef]
- Lee, D.; Lee, C.; Choi, S. A method for wafer assignment in semiconductor wafer fabrication considering both quality and productivity perspectives. J. Manuf. Syst. 2019, 52, 23–31. [Google Scholar] [CrossRef]
- Kim, H. Wafer Center Alignment System of Transfer Robot Based on Reduced Number of Sensors. Sensors 2022, 22, 8521. [Google Scholar] [CrossRef] [PubMed]
- Tang, J.Y.; Li, L. Semiconductor processing cycle prediction based on multi-layer data analysis framework. Comput. Integr. Manuf. Syst. 2019, 25, 1086–1092. [Google Scholar]
- Huang, Y.C.; Qu, D.K.; Xu, F. Research on dynamic control of frog-leg vacuum manipulator. J. Sichuan Univ. 2013, 45, 158–163. [Google Scholar]
- Cao, W.M.; Wang, Y.N.; Yin, F. Research on real-time three-dimensional monitoring method of teleoperation robot movement. Chin. J. Sci. Instrum. 2010, 31, 727–735. [Google Scholar]
- Yang, Z.L.; Wan, J.L.; Zhang, J.; Jiang, X.K. Data-driven defect pattern recognition method for wafer graph. China Mech. Eng. 2019, 30, 230–236. [Google Scholar]
- Zhao, B.; Wu, C.; Zou, F. Research on Small Sample Multi-target Grasping Technology based on Transfer Learning. Sensors 2023, 23, 5826. [Google Scholar] [CrossRef]
- Yin, J.; Bai, Q.; Haitjema, H. Two-dimensional detection of subsurface damage in silicon wafers with polarized laser scattering. J. Mater. Process. Technol. 2020, 284, 116746. [Google Scholar] [CrossRef]
- Lee, I.; Park, H.; Jang, J. System-Level Fault Diagnosis for an Industrial Wafer Transfer Robot with Multi-Component Failure Modes. Appl. Sci. 2023, 13, 10243. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Position | (mm) | (mm) |
|---|---|---|
| STN2 left | 347.108654 | 436.242168 |
| STN2 right | 491.692988 | 285.199749 |
| STN4 left | 90.105124 | 520.304507 |
| STN4 right | −119.096223 | 526.010610 |
| Sensor Position | (mm) | (mm) |
|---|---|---|
| STN2 left | 347.191978 | 436.337168 |
| STN2 right | 491.819200 | 285.329218 |
| STN4 left | 90.123207 | 520.472600 |
| STN4 right | −119.115173 | 526.250830 |
| Position Correction | (mm) | (mm) |
|---|---|---|
| STN2 deviation | −0.810415 | −0.960259 |
| STN4 deviation | −0.862323 | −0.976955 |
| Retraction Detection | (mm) | |
|---|---|---|
| STN2 compensation | 0.959894 | 0.051550 |
| STN4 compensation | 0.976556 | 0.053054 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, B.-Y.; Zhao, B.; Sun, R.-H. Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing. Sensors 2023, 23, 8502. https://doi.org/10.3390/s23208502
Han B-Y, Zhao B, Sun R-H. Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing. Sensors. 2023; 23(20):8502. https://doi.org/10.3390/s23208502
Chicago/Turabian StyleHan, Bing-Yuan, Bin Zhao, and Ruo-Huai Sun. 2023. "Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing" Sensors 23, no. 20: 8502. https://doi.org/10.3390/s23208502
APA StyleHan, B.-Y., Zhao, B., & Sun, R.-H. (2023). Research on Motion Control and Wafer-Centering Algorithm of Wafer-Handling Robot in Semiconductor Manufacturing. Sensors, 23(20), 8502. https://doi.org/10.3390/s23208502