
A Near-Optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks


Abstract
1. Introduction
1.1. Background
1.2. Research Motivation
1.3. Main Contributions
1.4. Organization of the Paper
2. Related Works
2.1. Duty Cycle
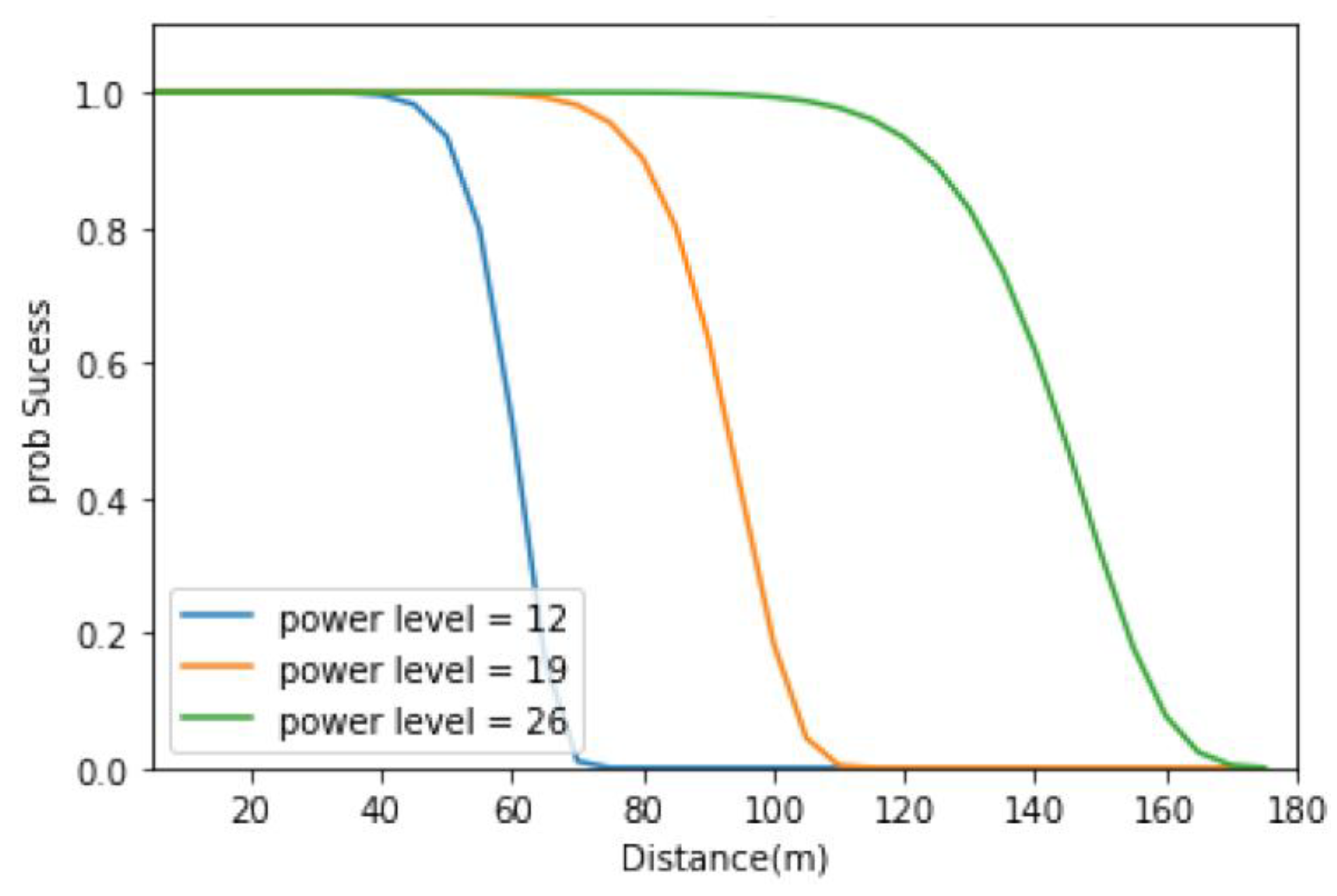
2.2. Transmission Power Control
2.3. Topology Control and Routing in Sensor Networks
2.4. The Proposed Approach
3. Mathematical Model
3.1. Problem Definition
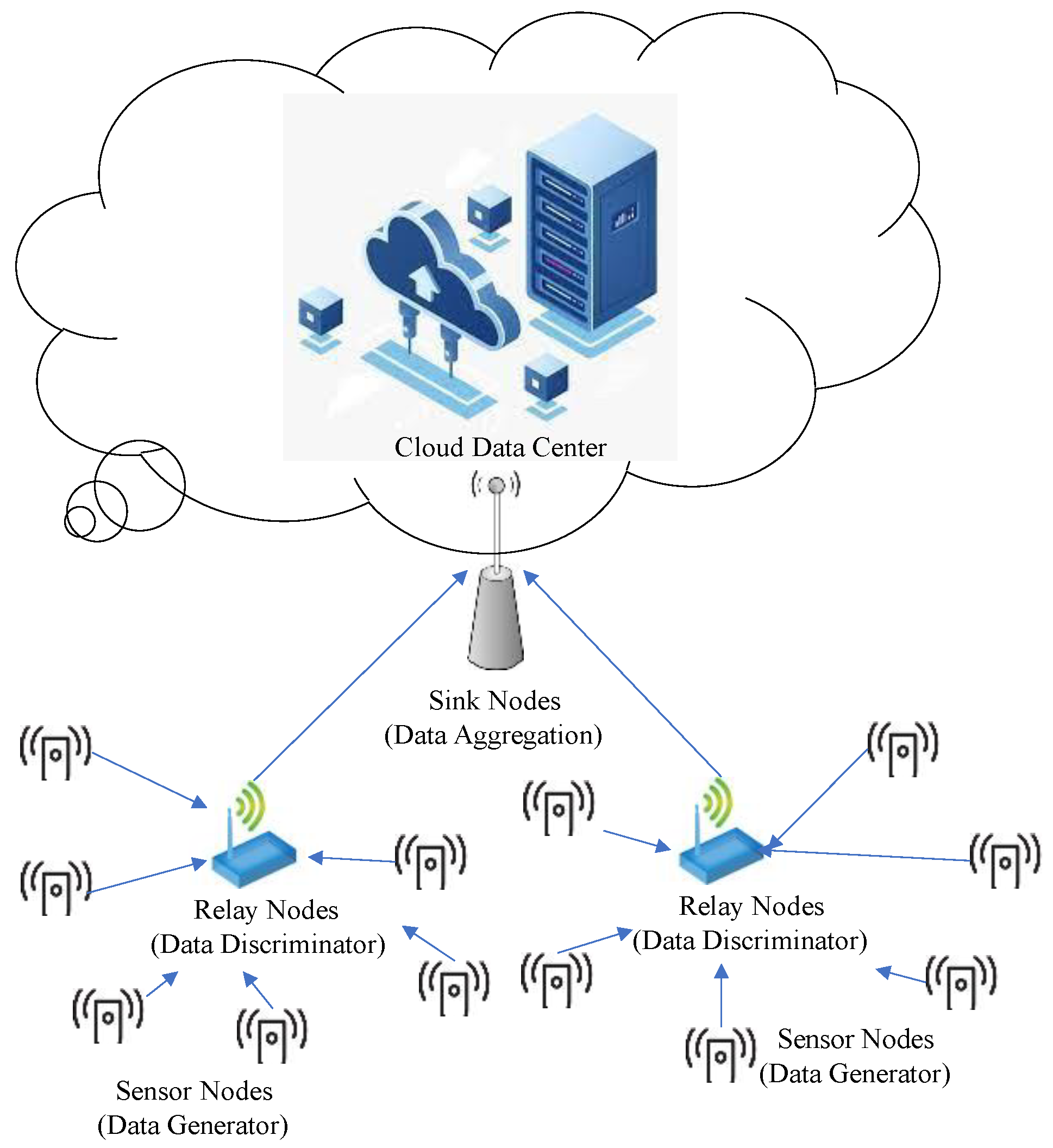
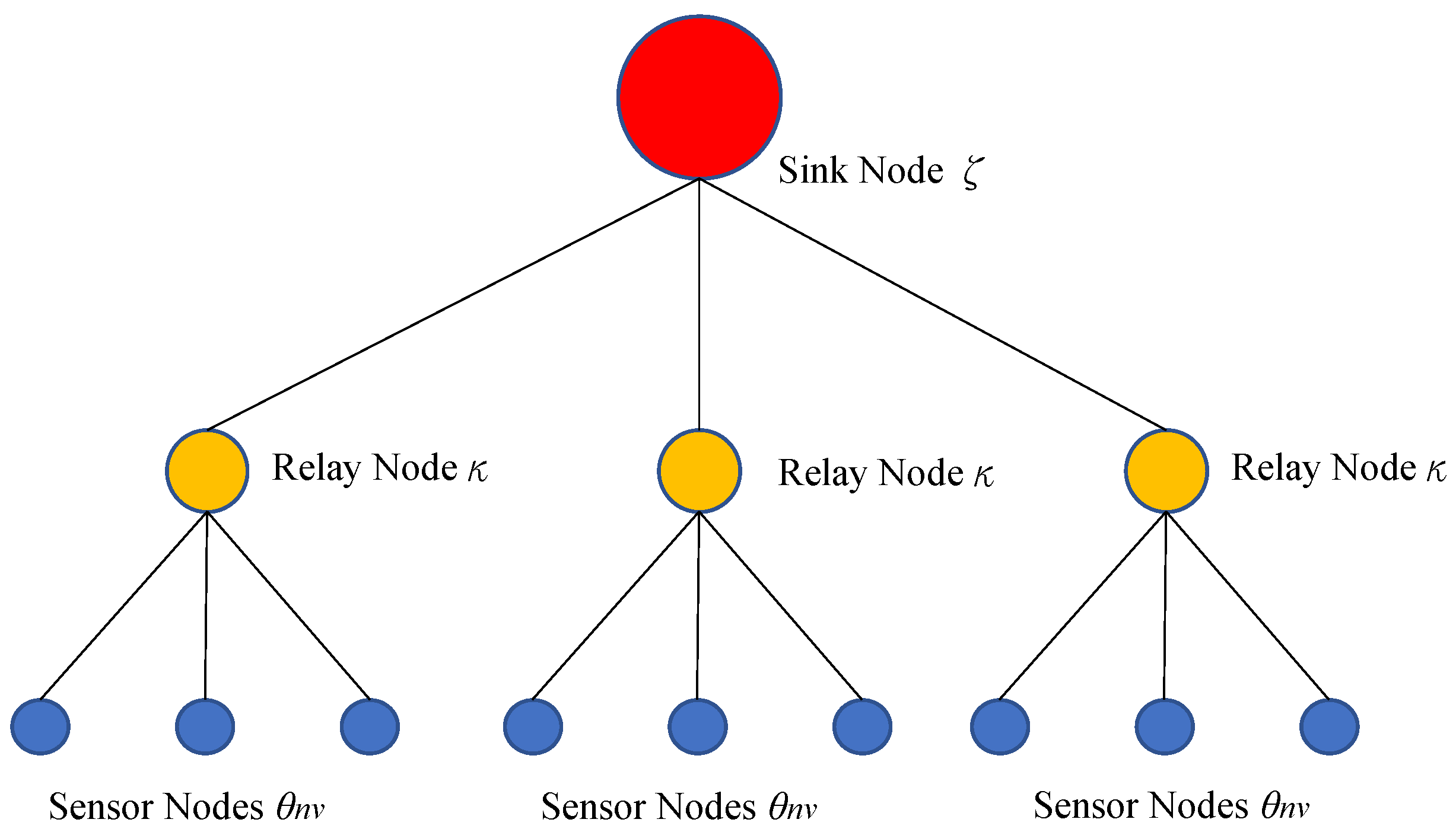
3.2. System Model
4. Optimization Solution Approach
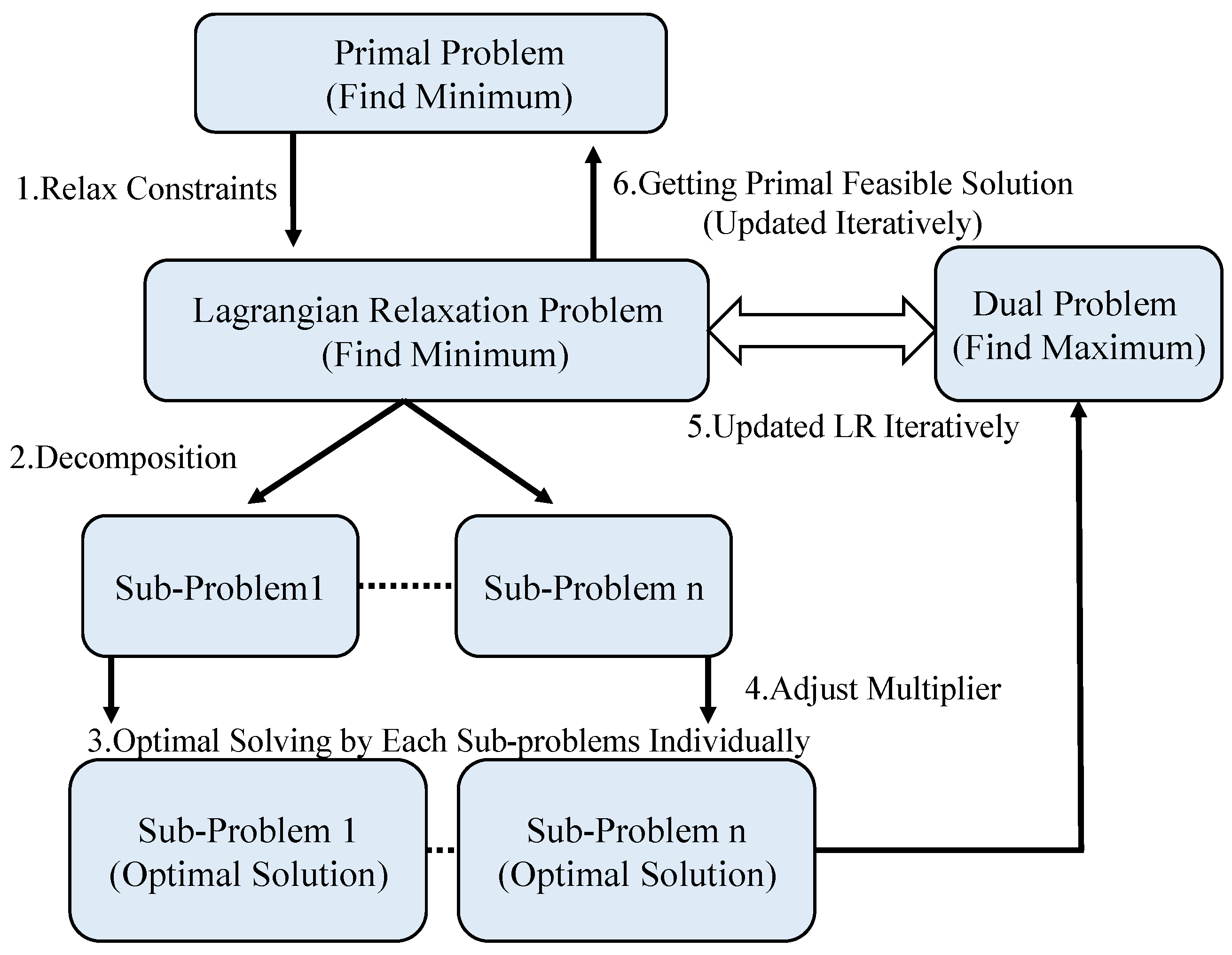
4.1. Lagrangian Relaxation Method
4.2. Reformulation for LR Optimization Solution
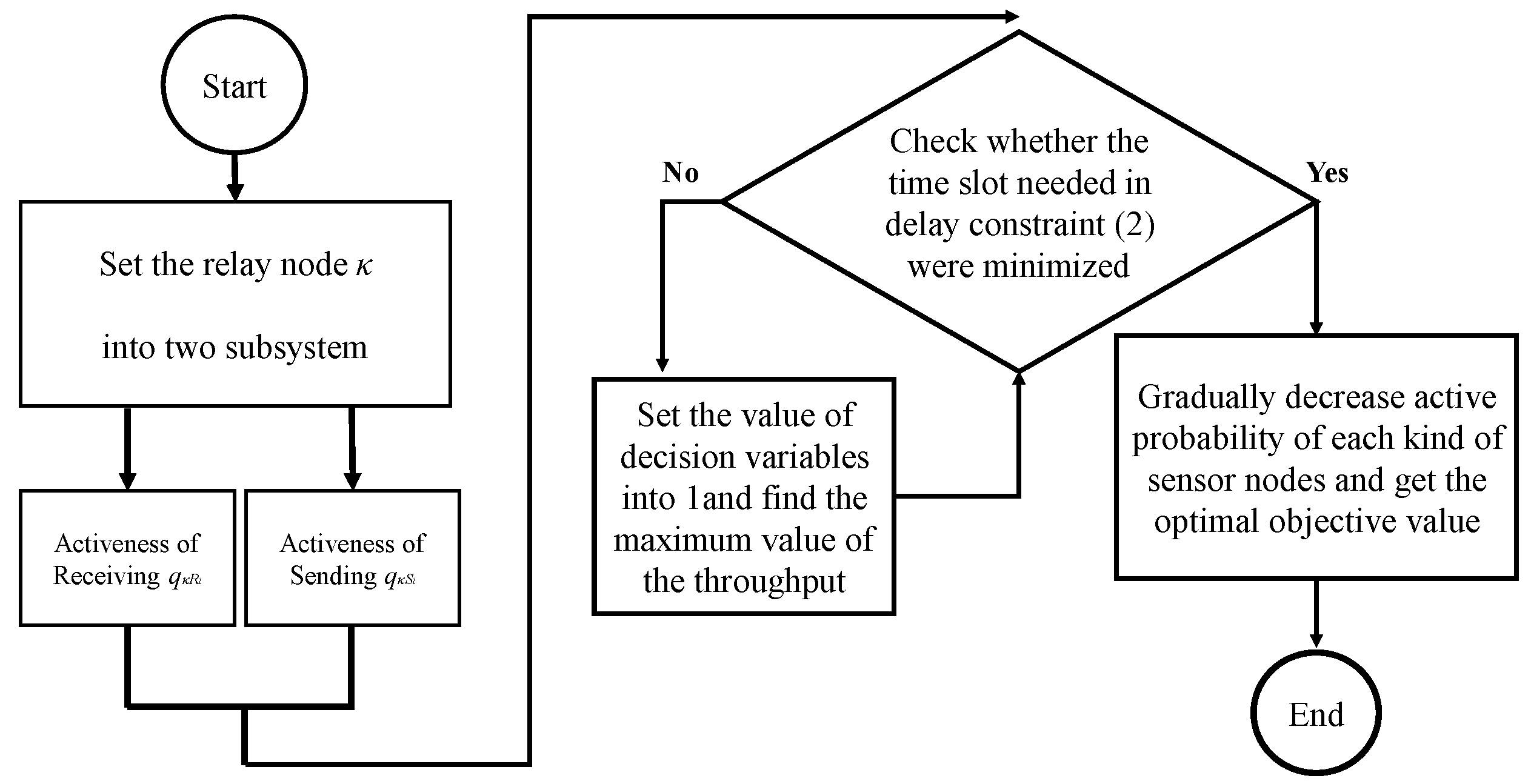
4.3. Solution of LR Subproblems
4.4. Obtaining Primal Feasible Solution
5. Experimental Results and Discussion
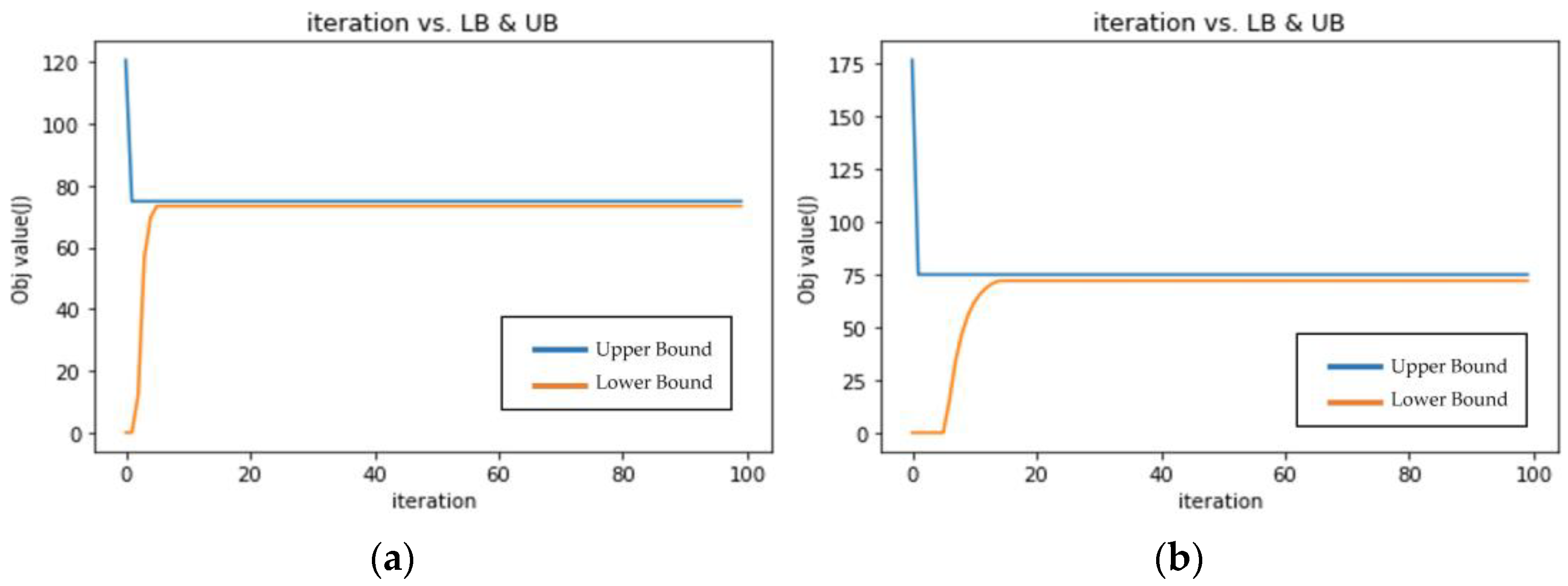
5.1. Many-to-One WSN Transmission Experiment with Different Delay Scenarios
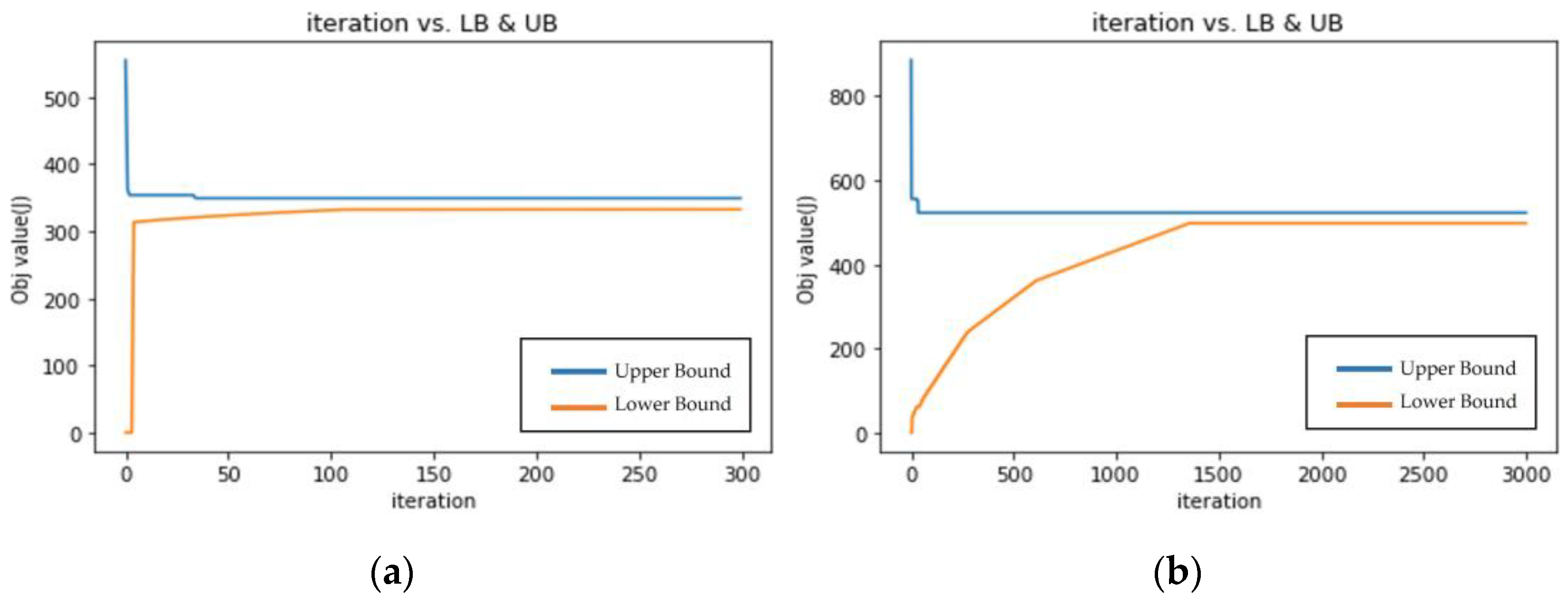
5.2. Tree Structure WSN Experiment with Different Numbers of Subtrees
5.3. Performance Analysis
6. Conclusions
6.1. Contributions and Key Results
6.2. Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zaman, N.; Jung, L.T.; Yasin, M.M. Enhancing energy efficiency of wireless sensor network through the design of energy efficient routing protocol. J. Sens. 2016, 2016, 9278701. [Google Scholar] [CrossRef]
- Capella, J.V.; Perles, A.; Bonastre, A.; Serrano, J.J. Historical building monitoring using an energy-efficient scalable wireless sensor network architecture. Sensors 2011, 11, 10074–10093. [Google Scholar] [CrossRef] [PubMed]
- Zhou, P.; Jiang, S.; Irissappane, A.; Zhang, J.; Zhou, J.; Teo, J.C.M. Toward energy-efficient trust system through watchdog optimization for WSNs. IEEE Trans. Inf. Forensics Secur. 2015, 3, 613–625. [Google Scholar] [CrossRef]
- Haseeb, K.; Din, I.U.; Almogren, A.; Islam, N. An energy efficient and secure IoT-based WSN framework: An application to smart agriculture. Sensors 2020, 7, 2081. [Google Scholar] [CrossRef]
- Yuan, F.; Zhan, Y.; Wang, Y. Data density correlation degree clustering method for data aggregation in WSN. IEEE Sens. J. 2013, 4, 1089–1098. [Google Scholar] [CrossRef]
- Lemartinel, A.; Castro, M.; Fouché, O.; De-Luca, J.C.; Feller, J.F. A review of nanocarbon-based solutions for the structural health monitoring of composite parts used in renewable energies. J. Compos. Sci. 2022, 6, 32. [Google Scholar] [CrossRef]
- Gul, O.M.; Erkmen, A.M.; Kantarci, B. UAV-Driven Sustainable and Quality-Aware Data Collection in Robotic Wireless Sensor Networks. IEEE Internet Things J. 2022, 9, 25150–25164. [Google Scholar] [CrossRef]
- Gong, W.; Xiao, J.; Han, S.; Wu, X.; Wu, N.; Chen, S. Research on robot wireless charging system based on constant-voltage and constant-current mode switching. Energy Rep. 2022, 8, 940–948. [Google Scholar] [CrossRef]
- Verma, V.K.; Sharma, A.; Ntalianis, K.; Verma, K. CTMRS: Catenarian-Trim Medley Routing System for Energy Balancing in Dispensed Computing Networks. IEEE Trans. Netw. Sci. Eng. 2022, 9, 3922–3933. [Google Scholar] [CrossRef]
- Lilhore, U.K.; Khalaf, O.I.; Simaiya, S.; Romero, C.A.T.; Abdulsahib, G.M.; Kumar, D. A depth-controlled and energy-efficient routing protocol for underwater wireless sensor networks. Int. J. Distrib. Sens. Netw. 2022, 18. [Google Scholar] [CrossRef]
- Nguyen, N.T.; Liu, B.H.; Pham, V.T.; Luo, Y.S. On maximizing the lifetime for data aggregation in wireless sensor networks using virtual data aggregation trees. Comput. Netw. 2016, 105, 99–110. [Google Scholar] [CrossRef]
- Khisa, S.; Moh, S. Priority-Aware Fast MAC Protocol for UAV-Assisted Industrial IoT Systems. IEEE Access 2021, 9, 57089–57106. [Google Scholar] [CrossRef]
- Li, H.; Lin, K.; Li, K. Energy-efficient and high-accuracy secure data aggregation in wireless sensor networks. Comput. Commun. 2011, 4, 591–597. [Google Scholar] [CrossRef]
- Józefowska, J.; Nowak, M.; Różycki, R.; Waligóra, G. Survey on Optimization Models for Energy-Efficient Computing Systems. Energies 2022, 15, 8710. [Google Scholar] [CrossRef]
- Ketata, I.; Ouerghemmi, S.; Fakhfakh, A.; Derbel, F. Design and Implementation of Low Noise Amplifier Operating at 868 MHz for Duty Cycled Wake-Up Receiver Front-End. Electronics 2022, 11, 3235. [Google Scholar] [CrossRef]
- Bouazizi, Y.; Benkhelifa, F.; ElSawy, H.; McCann, J.A. On the Scalability of Duty-Cycled LoRa Networks With Imperfect SF Orthogonality. IEEE Wirel. Commun. Lett. 2022, 11, 2310–2314. [Google Scholar] [CrossRef]
- Saraswat, J.; Bhattacharya, P.P. Effect of duty cycle on energy consumption in wireless sensor networks. Int. J. Comput. Netw. Commun. 2013, 5, 125. [Google Scholar] [CrossRef]
- Ghaffari, A. Congestion control mechanisms in wireless sensor networks: A survey. J. Netw. Comput. Appl. 2015, 52, 101–115. [Google Scholar] [CrossRef]
- Castagnetti, A.; Pegatoquet, A.; Le, T.N.; Auguin, M. A joint duty-cycle and transmission power management for energy harvesting WSN. IEEE Trans. Ind. Inform. 2014, 10, 928–936. [Google Scholar] [CrossRef]
- Sudevalayam, S.; Kulkarni, P. Energy harvesting sensor nodes: Survey and implications. IEEE Commun. Surv. Tutor. 2010, 13, 443–461. [Google Scholar] [CrossRef]
- Wu, M.; Wu, Y.; Liu, C.; Cai, Z.; Xiong, N.N.; Liu, A.; Ma, M. An effective delay reduction approach through a portion of nodes with a larger duty cycle for industrial WSNs. Sensors 2018, 18, 1535. [Google Scholar] [CrossRef] [PubMed]
- Bohloulzadeh, A.; Rajaei, M. A survey on congestion control protocols in wireless sensor networks. Int. J. Wirel. Inf. Netw. 2020, 27, 365–384. [Google Scholar] [CrossRef]
- El-Fouly, F.H.; Altamimi, A.B.; Ramadan, R.A. Energy and Environment-Aware Path Planning in Wireless Sensor Networks with Mobile Sink. Sensors 2022, 22, 9789. [Google Scholar] [CrossRef]
- Wang, F.; Liu, J. On reliable broadcast in low duty-cycle wireless sensor networks. IEEE Trans. Mob. Comput. 2011, 11, 767–779. [Google Scholar] [CrossRef]
- Alayev, Y.; Chen, F.; Hou, Y.; Johnson, M.P.; Bar-Noy, A.; La Porta, T.F.; Leung, K.K. Throughput maximization in mobile WSN scheduling with power control and rate selection. IEEE Trans. Wirel. Commun. 2014, 13, 4066–4079. [Google Scholar] [CrossRef]
- Wang, N.C.; Lee, C.Y.; Chen, Y.L.; Chen, C.M.; Chen, Z.Z. An Energy Efficient Load Balancing Tree-Based Data Aggregation Scheme for Grid-Based Wireless Sensor Networks. Sensors 2022, 22, 9303. [Google Scholar] [CrossRef]
- Torkestani, J.A. An energy-efficient topology construction algorithm for wireless sensor networks. Comput. Netw. 2013, 57, 1714–1725. [Google Scholar] [CrossRef]
- Lin, S.; Miao, F.; Zhang, J.; Zhou, G.; Gu, L.; He, T.; Pappas, G.J. ATPC: Adaptive transmission power control for wireless sensor networks. ACM Trans. Sens. Netw. 2016, 12, 1–31. [Google Scholar] [CrossRef]
- Lee, W.; Kim, N.; Lee, B.D. An adaptive transmission power control algorithm for wearable healthcare systems based on variations in the body conditions. J. Inf. Process. Syst. 2019, 15, 593–603. [Google Scholar] [CrossRef]
- Philip, M.S.; Singh, P. Adaptive transmit power control algorithm for dynamic lora nodes in water quality monitoring system. Sustain. Comput. Inform. Syst. 2021, 32, 100613. [Google Scholar] [CrossRef]
- Vales-Alonso, J.; Egea-López, E.; Martínez-Sala, A.; Pavon-Marino, P.; Bueno-Delgado, M.V.; García-Haro, J. Performance evaluation of MAC transmission power control in wireless sensor networks. Comput. Netw. 2007, 51, 1483–1498. [Google Scholar] [CrossRef]
- El-Fouly, F.H.; Ramadan, R.A. E3AF: Energy efficient environment-aware fusion based reliable routing in wireless sensor networks. IEEE Access 2020, 8, 112145–112159. [Google Scholar] [CrossRef]
- He, J.S.; Ji, S.; Pan, Y.; Cai, Z. Approximation algorithms for load-balanced virtual backbone construction in wireless sensor networks. Theor. Comput. Sci. 2013, 507, 2–16. [Google Scholar] [CrossRef]
- Chiwewe, T.M.; Hancke, G.P. A distributed topology control technique for low interference and energy efficiency in wireless sensor networks. IEEE Trans. Ind. Inform. 2011, 8, 11–19. [Google Scholar] [CrossRef]
- Kui, X.; Sheng, Y.; Du, H.; Liang, J. Constructing a CDS-based network backbone for data collection in wireless sensor networks. Int. J. Distrib. Sens. Netw. 2013, 9, 258081. [Google Scholar] [CrossRef]
- Ghosh, A.; Incel, Ö.D.; Kumar, V.A.; Krishnamachari, B. Multichannel scheduling and spanning trees: Throughput–delay tradeoff for fast data collection in sensor networks. IEEE/ACM Trans. Netw. 2011, 19, 1731–1744. [Google Scholar] [CrossRef]
- Guo, P.; Liu, X.; Cao, J.; Tang, S. Lossless in-network processing and its routing design in wireless sensor networks. IEEE Trans. Wirel. Commun. 2017, 16, 6528–6542. [Google Scholar] [CrossRef]
- Weng, H.C.; Chen, Y.H.; Wu, E.H.K.; Chen, G.H. Correlated data gathering with double trees in wireless sensor networks. IEEE Sens. J. 2011, 12, 1147–1156. [Google Scholar] [CrossRef]
- Patel, P.D.; Lapsiwala, P.B.; Kshirsagar, R.V. Data aggregation in wireless sensor network. Int. J. Manag. IT Eng. 2012, 2, 457–472. [Google Scholar] [CrossRef]
- Yun, Y.; Xia, Y. Maximizing the lifetime of wireless sensor networks with mobile sink in delay-tolerant applications. IEEE Trans. Mob. Comput. 2010, 9, 1308–1318. [Google Scholar] [CrossRef]
- Białoń, P.M. A randomized rounding approach to a k-splittable multicommodity flow problem with lower path flow bounds affording solution quality guarantees. Telecommun. Syst. 2017, 64, 525–542. [Google Scholar] [CrossRef]
- Salimifard, K.; Bigharaz, S. The multicommodity network flow problem: State of the art classification, applications, and solution methods. Oper. Res. 2022, 22, 1–47. [Google Scholar] [CrossRef]
- Mohanty, J.P.; Mandal, C.; Reade, C. Distributed construction of minimum connected dominating set in wireless sensor network using two-hop information. Comput. Netw. 2017, 123, 137–152. [Google Scholar] [CrossRef]
- Güney, E.; Aras, N.; Altınel, İ.K.; Ersoy, C. Efficient integer programming formulations for optimum sink location and routing in heterogeneous wireless sensor networks. Comput. Netw. 2010, 54, 1805–1822. [Google Scholar] [CrossRef]
- Bhattacharya, A.; Kumar, A. A shortest path tree based algorithm for relay placement in a wireless sensor network and its performance analysis. Comput. Netw. 2014, 71, 48–62. [Google Scholar] [CrossRef]
- Guan, Q.; Yu, F.R.; Jiang, S.; Wei, G. Prediction-based topology control and routing in cognitive radio mobile ad hoc networks. IEEE Trans. Veh. Technol. 2010, 59, 4443–4452. [Google Scholar] [CrossRef]
- Coutinho, R.W.; Boukerche, A.; Vieira, L.F.; Loureiro, A.A. Underwater wireless sensor networks: A new challenge for topology control–based systems. ACM Comput. Surv. 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Kapelko, R. Analysis of the Threshold for Energy Consumption in Displacement of Random Sensors. Sensors 2022, 22, 8789. [Google Scholar] [CrossRef]
- Narayanan, R.P.; Sarath, T.V.; Vineeth, V.V. Survey on motes used in wireless sensor networks: Performance & parametric analysis. Wirel. Sens. Netw. 2016, 8, 51. [Google Scholar] [CrossRef]
- Mittal, N.; Singh, U.; Salgotra, R. Tree-based threshold-sensitive energy-efficient routing approach for wireless sensor networks. Wirel. Pers. Commun. 2019, 108, 473–492. [Google Scholar] [CrossRef]
- Hu, H.-C.; Wang, P.-C. Computation Offloading Game for Multi-Channel Wireless Sensor Networks. Sensors 2022, 22, 8718. [Google Scholar] [CrossRef] [PubMed]
- Khonde, S.S.; Ghatol, A.; Dudul, S.V. A novel approach towards hardware and software co-design perspective for low power communication centric RF transceiver in wireless sensor node. In Proceedings of the 2016 International Conference on Communication and Electronics Systems (ICCES 2016), Coimbatore, India, 21–22 October 2016; pp. 1–4. [Google Scholar]
- Yildiz, H.U.; Tavli, B.; Yanikomeroglu, H. Transmission power control for link-level handshaking in wireless sensor networks. IEEE Sens. J. 2015, 16, 561–576. [Google Scholar] [CrossRef]
- Gocgun, Y.; Ghate, A. Lagrangian relaxation and constraint generation for allocation and advanced scheduling. Comput. Oper. Res. 2012, 39, 2323–2336. [Google Scholar] [CrossRef]
- Li, Z.; Wu, W.; Zhang, B.; Sun, H.; Guo, Q. Dynamic economic dispatch using Lagrangian relaxation with multiplier updates based on a quasi-Newton method. IEEE Trans. Power Syst. 2013, 28, 4516–4527. [Google Scholar] [CrossRef]
- Masazade, E.; Niu, R.; Varshney, P.K. Dynamic bit allocation for object tracking in wireless sensor networks. IEEE Trans. Signal Process. 2012, 60, 5048–5063. [Google Scholar] [CrossRef]
- Kulkarni, R.V.; Förster, A.; Venayagamoorthy, G.K. Computational intelligence in wireless sensor networks: A survey. IEEE Commun. Surv. Tutor. 2010, 13, 68–96. [Google Scholar] [CrossRef]
- Shen, B.; Wang, Z.; Wang, D.; Liu, H. Distributed state-saturated recursive filtering over sensor networks under round-robin protocol. IEEE Trans. Cybern. 2019, 50, 3605–3615. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Notation | Description |
|---|---|
| The index set of possible number of subtrees, defined as | |
| The index set of possible numbers of sensor nodes in a single subtree, defined as | |
| The sensor node that responsible for sensing and gathering data from different area, which is the node number in subtree | |
| The relay node from subtree , responsible for aggregating data sent from the lower-level layer sensor nodes | |
| The sink node that responsible for aggregating data sent from the relay nodes | |
| The allowable end to end delay from sensor node to sink node for Subtree | |
| Distance between sensor and relay node from subtree | |
| Set of possible range for sensor nodes in subtree | |
| Set of possible range for relay node in subtree | |
| Set of possible range for sink node | |
| Sensor node’s timeout interval from subtree (a given unit of time slots) | |
| Relay node’s timeout interval from subtree (a given unit of time slots) | |
| The transmission time from sensor nodes to relay node, e.g., one time slot | |
| The expected smallest time slots for the network to maintain | |
| The initial power storage for sensor node | |
| The initial power storage for relay node from subtree | |
| The initial power storage for sink node |
| Notation | Description |
|---|---|
| The transmission range of sensor nodes in subtree , | |
| The transmission range of relay node in subtree , | |
| The transmission range of sink node | |
| M | Index set of all possible packet size, including |
| The active probability of sensor nodes in a time slot in subtree | |
| The active probability of relay nodes receive data in a time slot in subtree | |
| The active probability of relay nodes send data in a time slot in subtree | |
| The active probability of sink nodes in a time slot | |
| The probability of sensor nodes to transmit packet with size to relay node in subtree when no error occurs with transmission range radius of | |
| The probability of the relay node in subtree to transmit packet with M size to sink node when no error occurs with transmission range radius of | |
| The average power consumption rate influenced by m when sensor nodes in subtree is active with transmission range in one time slot | |
| The average power consumption rate influenced by m when sensor nodes in subtree is inactive with transmission range in one time slot | |
| The average power consumption rate influenced by m when the relay node in subtree is active with transmission range in one time slot | |
| The average power consumption rate influenced by m when the relay node in subtree is inactive with transmission range in one time slot | |
| The average power consumption rate influenced by m when the sink node is active with transmission range in one time slot | |
| The average power consumption rate influenced by m when the sink node is inactive with transmission range in one time slot | |
| The average power consumption rate for sensor nodes in subtree to transmit a size packet in one time slot with transmission range | |
| The average power consumption rate for the relay node in subtree to transmit a size packet in one time slot with transmission range |
| Experiments | LB (watts) | UB (watts) | Time (sec) | GAP (%) |
|---|---|---|---|---|
| Normal Delay | 71.9 | 74.82 | 15.8 | 4.08 |
| Tight Delay | 73.3 | 74.84 | 4.8 | 2.04 |
| Experiments | LB (watts) | UB (watts) | Time (sec) | GAP (%) |
|---|---|---|---|---|
| = 1001 | 332.75 | 349.38 | 308.6 | 4.9 |
| = 3000 | 498.06 | 522.76 | 4662.7 | 4.96 |
| Exhaustive Search | Round Robin (RR) | Proposed Method | |
|---|---|---|---|
| Objective value (watts) | 64.458 | 73.464 | 63.453 |
| Time (sec) | 315.5 | 30.2 | 19.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tai, K.-Y.; Liu, B.-C.; Hsiao, C.-H.; Tsai, M.-C.; Lin, F.Y.-S. A Near-Optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks. Sensors 2023, 23, 763. https://doi.org/10.3390/s23020763
Tai K-Y, Liu B-C, Hsiao C-H, Tsai M-C, Lin FY-S. A Near-Optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks. Sensors. 2023; 23(2):763. https://doi.org/10.3390/s23020763
Chicago/Turabian StyleTai, Kuang-Yen, Bo-Chen Liu, Chiu-Han Hsiao, Ming-Chi Tsai, and Frank Yeong-Sung Lin. 2023. "A Near-Optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks" Sensors 23, no. 2: 763. https://doi.org/10.3390/s23020763
APA StyleTai, K.-Y., Liu, B.-C., Hsiao, C.-H., Tsai, M.-C., & Lin, F. Y.-S. (2023). A Near-Optimal Energy Management Mechanism Considering QoS and Fairness Requirements in Tree Structure Wireless Sensor Networks. Sensors, 23(2), 763. https://doi.org/10.3390/s23020763