
A New Lunar Dome Detection Method Based on Improved YOLOv7
Abstract
:1. Introduction
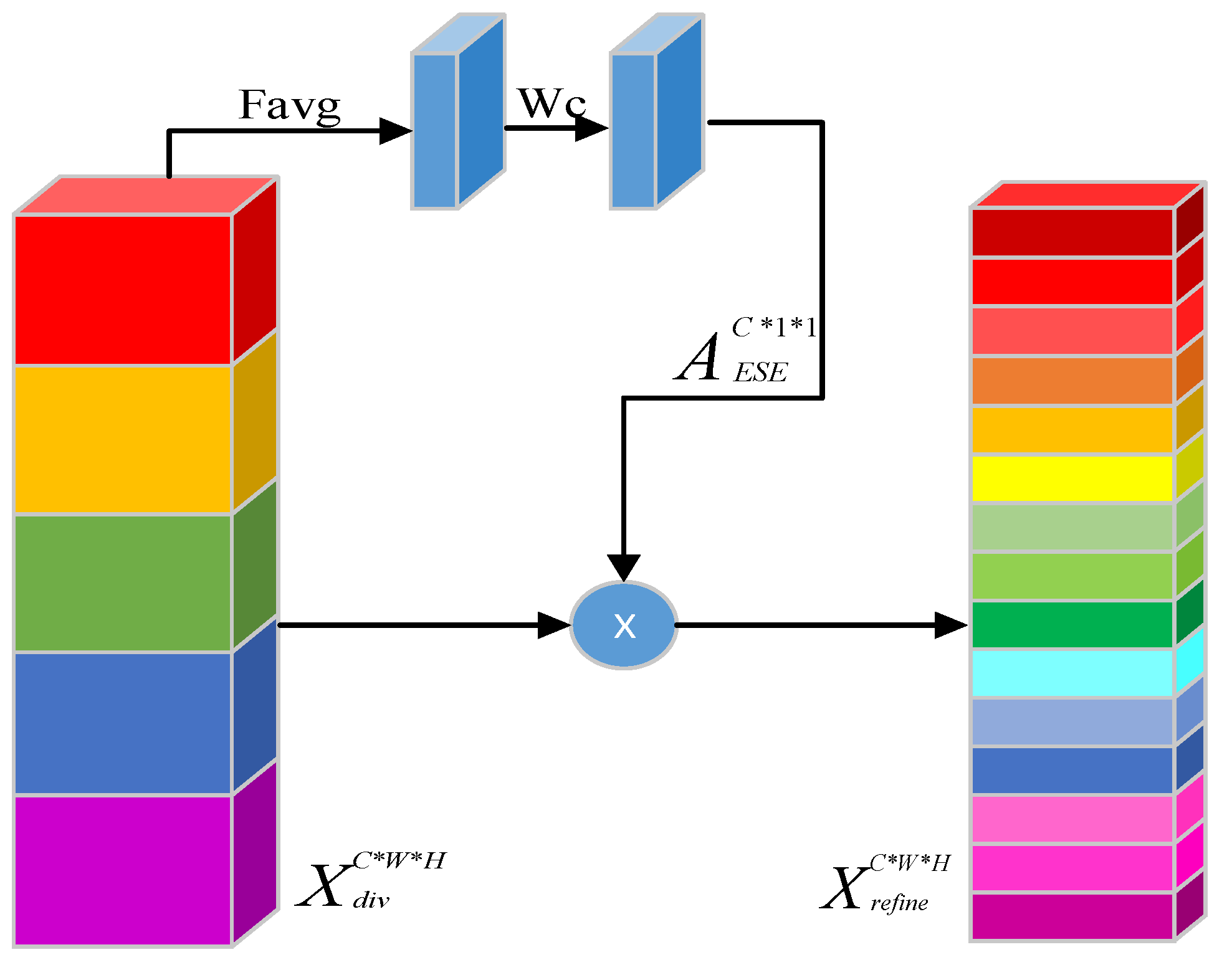
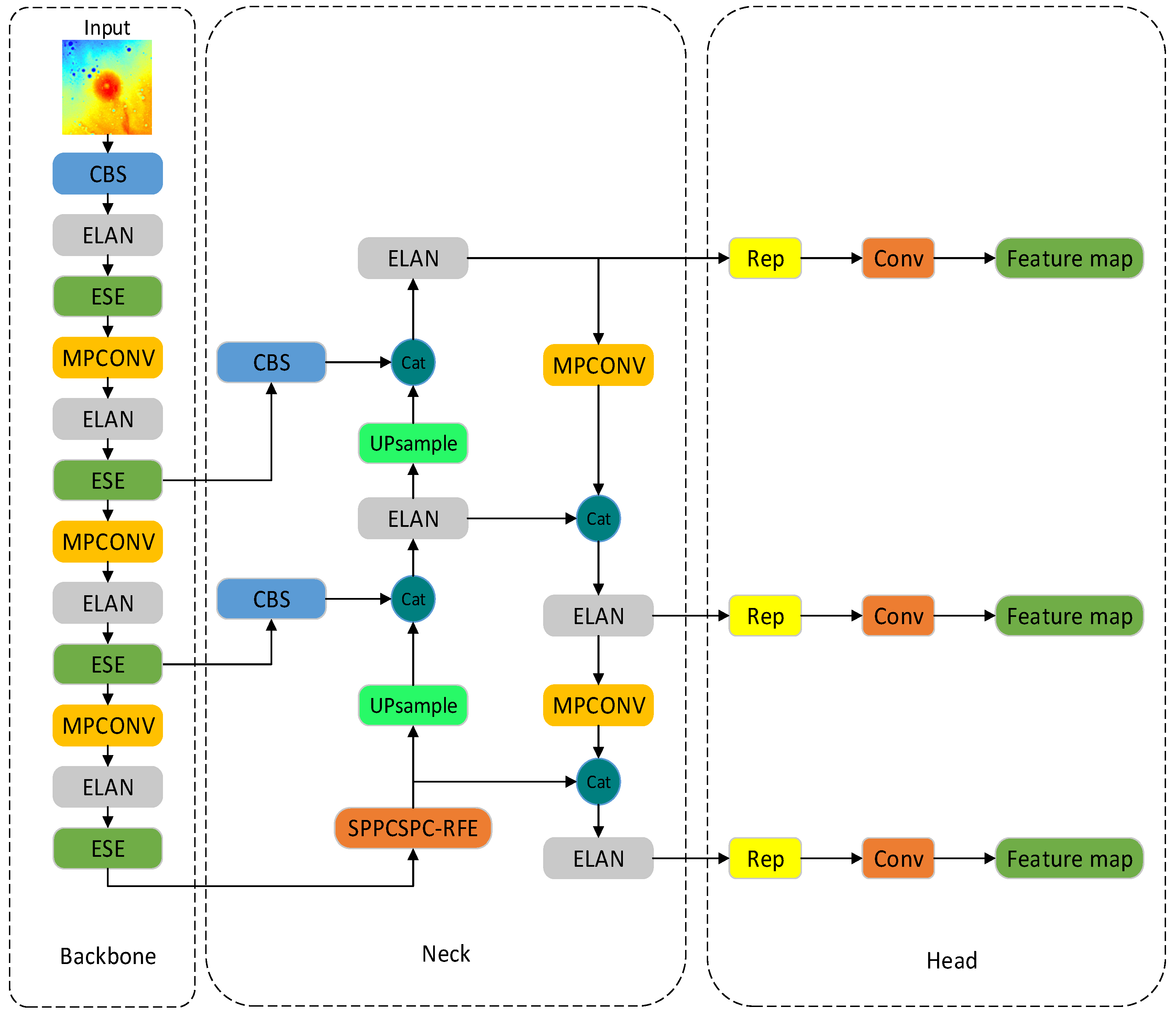
- We performed a rendering operation on the DEM images based on the elevation values to enhance the contrast of the domes. The ESE attention module was added to the backbone and neck sections to reduce information loss in the dome feature map.
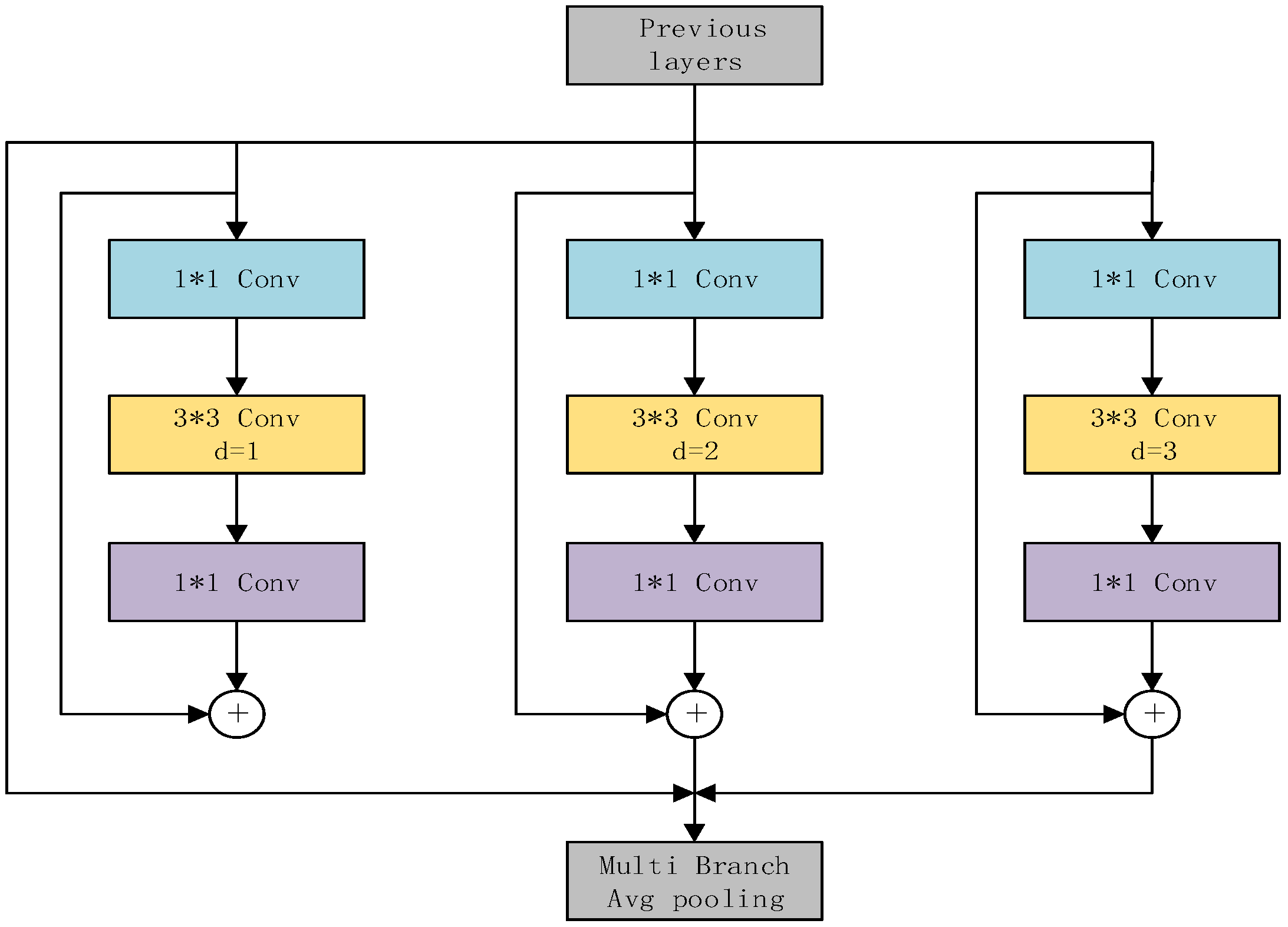
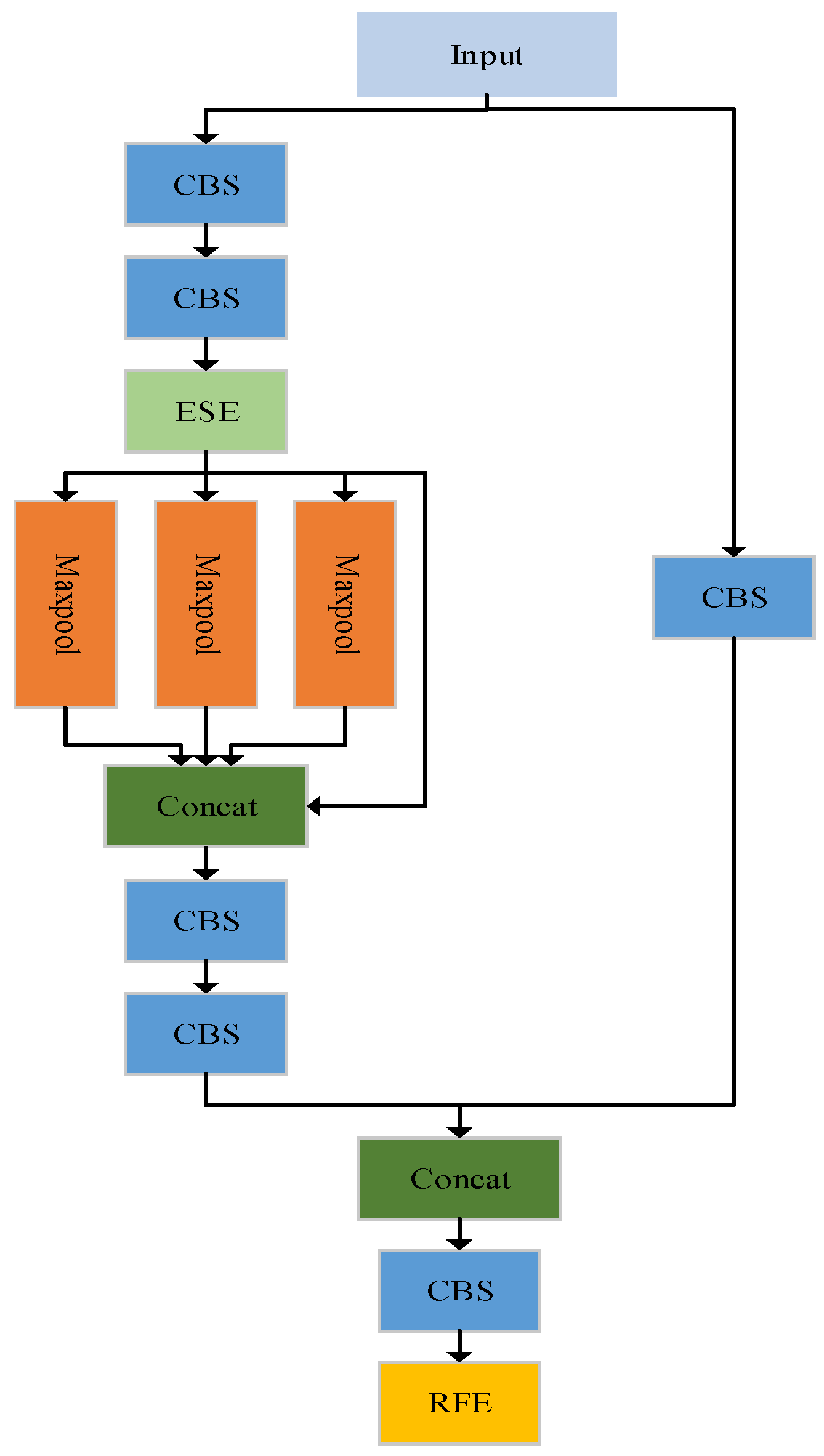
- We proposed a new SPPCSPC-RFE module by adding the RFE module into the neck section to adapt dome feature maps of different shapes and sizes.
- The bounding box regression loss function CIOU was replaced by WIOU to improve the performance of the model in dome detection.
2. Dataset and Methods
2.1. Dataset
2.2. YOLOv7 Network Structure
2.3. Improvement to the YOLOv7 Network
2.3.1. ESE Attention Module
2.3.2. SPPCSPC-RFE Module
2.3.3. Bounding Box Regression Loss Function
3. Experimental Results
3.1. Experimental Environment Configuration
3.2. Evaluation Metrics
3.3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Head, J.W.; Gifford, A.J. Lunar mare domes: Classification and modes of origin. Moon Planets 1980, 22, 235–258. [Google Scholar] [CrossRef]
- Shaler, N.S.J. A Comparison of the Features of the Earth and the Moon; Smithsonian Institution: Washington, DC, USA, 1903. [Google Scholar]
- Spurr, J.E. Geology Applied to Selenology; Books I and II Science Press: Lancaster, NH, USA, 1945; Volume 6, p. 189. [Google Scholar]
- Salisbury, J.W. The Origin of Lunar Domes. Astrophys. J. 1961, 134, 126. [Google Scholar] [CrossRef]
- Smith, E.I. Identification, distribution and significance of lunar volcanic domes. Moon 1973, 6, 3–31. [Google Scholar] [CrossRef]
- Weitz, C.M.; Head, J.W., III. Spectral properties of the Marius Hills volcanic complex and implications for the formation of lunar domes and cones. J. Geophys. Res. Planets 1999, 104, 18933–18956. [Google Scholar] [CrossRef]
- Wöhler, C.; Lena, R.; Lazzarotti, P.; Phillips, J.; Wirths, M.; Pujic, Z.; Group, G.L.R.G. A combined spectrophotometric and morphometric study of the lunar mare dome fields near Cauchy, Arago, Hortensius, and Milichius. Icarus 2006, 183, 237–264. [Google Scholar] [CrossRef]
- Whitford-Stark, J.L.; Head, J.W. The Procellarum volcanic complexes-Contrasting styles of volcanism. In Proceedings of the 8th Lunar Science Conference, Houston, TX, USA, 14–18 March 1977; Pergamon Press, Inc.: New York, NY, USA, 1977; Volume 3, (A78-41551 18-91). pp. 2705–2724. [Google Scholar]
- Baldwin, R.B. The Measure of the Moon; University of Chicago Press: Chicago, IL, USA, 1963. [Google Scholar]
- Fielder, G. Lunar Geology; Lutterworth Press: Cambridge, UK, 1965. [Google Scholar]
- Lena, R.; Wöhler, C.; Phillips, J.; Wirths, M.; Bregante, M.T.; Science, S. Lunar domes in the Doppelmayer region: Spectrophotometry, morphometry, rheology, and eruption conditions. Planet. Space Sci. 2007, 55, 1201–1217. [Google Scholar] [CrossRef]
- Chen, Y.; Huang, Q.; Zhao, J.; Hu, X. Unsupervised machine learning on domes in the lunar gardner region: Implications for dome classification and local magmatic activities on the moon. Remote Sens. 2021, 13, 845. [Google Scholar] [CrossRef]
- Lawrence, S.J.; Stopar, J.D.; Hawke, B.R.; Greenhagen, B.T.; Cahill, J.T.; Bandfield, J.L.; Jolliff, B.L.; Denevi, B.W.; Robinson, M.S.; Glotch, T.D.; et al. LRO observations of morphology and surface roughness of volcanic cones and lobate lava flows in the Marius Hills. J. Geophys. Res. Planets 2013, 118, 615–634. [Google Scholar] [CrossRef]
- Liu, J.; Li, C.; Wang, W.; Zeng, X.; Mu, L.; Yang, Y. Extraction of lunar domes from Chang’E-2 data with new method. Icarus 2019, 321, 29–33. [Google Scholar] [CrossRef]
- Arya, A.; Rajasekhar, R.; Sur, K.; Gopala Krishna, B.; Suresh, K.; Srinivasan, T.; Iyer, K.; Chauhan, P.; Ajai; Kiran Kumar, A.S.; et al. Morphometric and rheological study of lunar domes of Marius Hills volcanic complex region using Chandrayaan-1 and recent datasets. J. Earth Syst. Sci. 2018, 127, 70. [Google Scholar] [CrossRef]
- Micheal, A.A.; Vani, K. Clustering-based dome detection in lunar images using DTM data. Int. J. Remote Sens. 2018, 39, 5794–5808. [Google Scholar] [CrossRef]
- Qiao, L.; Head, J.W.; Wilson, L.; Chen, J.; Ling, Z. Mare domes in Mare Tranquillitatis: Identification, characterization, and implications for their origin. J. Geophys. Res. Planets 2021, 126, e2021JE006888. [Google Scholar] [CrossRef]
- Wan, S.; Qiao, L.; Ling, Z. Identification and Geomorphometric Characterization of Volcanic Cones in the Marius Hills, the Moon. J. Geophys. Res. Planets 2022, 127, e2022JE007207. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. In Proceedings of the Annual Conference on Neural Information Processing Systems 2015, Montreal, QC, USA, 7–12 December 2015; Volume 28. [Google Scholar]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. Ssd: Single shot multibox detector. In Proceedings of the Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, 11–14 October 2016; Proceedings Part I 14. pp. 21–37. [Google Scholar]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–26 October 2017; pp. 2961–2969. [Google Scholar]
- Cai, Z.; Vasconcelos, N. Cascade r-cnn: Delving into high quality object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 6154–6162. [Google Scholar]
- Redmon, J.; Farhadi, A. Yolov3: An incremental improvement. arXiv 2018, arXiv:1804.02767. [Google Scholar]
- Jiang, B.; Chen, S.; Wang, B.; Luo, B. MGLNN: Semi-supervised learning via multiple graph cooperative learning neural networks. Neural Netw. 2022, 153, 204–214. [Google Scholar] [CrossRef]
- Zhu, X.; Lyu, S.; Wang, X.; Zhao, Q. TPH-YOLOv5: Improved YOLOv5 based on transformer prediction head for object detection on drone-captured scenarios. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, BC, Canada, 11–17 October 2021; pp. 2778–2788. [Google Scholar]
- Roy, A.M.; Bhaduri, J. DenseSPH-YOLOv5: An automated damage detection model based on DenseNet and Swin-Transformer prediction head-enabled YOLOv5 with attention mechanism. Adv. Eng. Inform. 2023, 56, 102007. [Google Scholar] [CrossRef]
- Chen, J.; Liu, H.; Zhang, Y.; Zhang, D.; Ouyang, H.; Chen, X. A multiscale lightweight and efficient model based on YOLOv7: Applied to citrus orchard. Plants 2022, 11, 3260. [Google Scholar] [CrossRef] [PubMed]
- Liu, S.; Wang, Y.; Yu, Q.; Liu, H.; Peng, Z. CEAM-YOLOv7: Improved YOLOv7 based on channel expansion and attention mechanism for driver distraction behavior detection. IEEE Access 2022, 10, 129116–129124. [Google Scholar] [CrossRef]
- Ahrens, C.; Lena, R. An Effusive Lunar Dome Near Fracastorius Crater: Spectral and Morphometric Properties. Remote Sens. 2022, 14, 6135. [Google Scholar] [CrossRef]
- Head, J.; Lloyd, D. Near-terminator photography. NASA Johnson Space Center Apollo 17 Prelim. Sci. Rept. 1971, 272, 297. [Google Scholar]
- Lloyd, D.; Head, J. Lunar surface properties as determined from earthshine and near-terminator photography. In Proceedings of the Lunar Science Conference, Houston, TX, USA, 10–13 January 1972; Volume 3, p. 3127. [Google Scholar]
- Barker, M.; Mazarico, E.; Neumann, G.; Zuber, M.; Haruyama, J.; Smith, D.J.I. A new lunar digital elevation model from the Lunar Orbiter Laser Altimeter and SELENE Terrain Camera. Icarus 2016, 273, 346–355. [Google Scholar] [CrossRef]
- Jamieson, H.; Phillips, J. Lunar dome catalog. Stroll. Astron. 1992, 36, 123–129. [Google Scholar]
- Available online: https://digilander.libero.it/glrgroup/kapralcatalog.pdf (accessed on 20 May 2005).
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Vancouver, BC, Canada, 17–24 June 2023; pp. 7464–7475. [Google Scholar]
- Hu, J.; Shen, L.; Sun, G. Squeeze-and-excitation networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 7132–7141. [Google Scholar]
- Lee, Y.; Park, J. Centermask: Real-time anchor-free instance segmentation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 13906–13915. [Google Scholar]
- Yu, Z.; Huang, H.; Chen, W.; Su, Y.; Liu, Y.; Wang, X. Yolo-facev2: A scale and occlusion aware face detector. arXiv 2022, arXiv:2208.02019. [Google Scholar]
- Tong, Z.; Chen, Y.; Xu, Z.; Yu, R. Wise-IoU: Bounding Box Regression Loss with Dynamic Focusing Mechanism. arXiv 2023, arXiv:2301.10051. [Google Scholar]
- Available online: https://github.com/ultralytics/yolov5 (accessed on 12 April 2021).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Group | Data Enhancement | ESE | RFE | WIOU | MAP@0.5 (%) | MAP@0.5:0.9 (%) | P (%) | R (%) | Parameters |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 83.6 | 44.9 | 82.7 | 77.0 | 37.62 | |||||
| 2 | √ | 84.9 | 48.7 | 84.6 | 81.9 | 37.62 | ||||
| YOLOv7 | 3 | √ | √ | 86.5 | 50.7 | 87.5 | 77.6 | 39.1 | ||
| 4 | √ | √ | √ | 87.7 | 48.1 | 87.4 | 83.9 | 39.3 | ||
| 5 | √ | √ | √ | √ | 88.7 | 52.0 | 85.6 | 86.4 | 39.9 |
| Method | MAP@0.5 (%) | MAP@0.5:0.9 (%) | P (%) | R (%) | Parameters | GFLOPS |
|---|---|---|---|---|---|---|
| SSD | 83.1 | 45.3 | 81.9 | 59.5 | 24.39 | 34.27 |
| YOLOv3 | 82.2 | 42.3 | 80.2 | 51.6 | 21.2 | 49.0 |
| Faster-RCNN | 85.0 | 49.8 | 85.0 | 59.6 | 41.12 | 91.0 |
| YOLOv5 | 83.2 | 51.8 | 84.8 | 78.1 | 43.97 | 107.6 |
| TPH-YOLOv5 | 84.6 | 52.1 | 84.5 | 81.6 | 44.0 | 108.2 |
| YOLOv7 | 84.9 | 48.7 | 84.6 | 81.9 | 37.62 | 106.5 |
| Citrus-YOLOv7 | 85.6 | 47.5 | 82.5 | 84.3 | 26.44 | 76.4 |
| Ours | 88.7 | 52.0 | 85.6 | 86.4 | 39.9 | 107.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Y.; Tian, X. A New Lunar Dome Detection Method Based on Improved YOLOv7. Sensors 2023, 23, 8304. https://doi.org/10.3390/s23198304
Tian Y, Tian X. A New Lunar Dome Detection Method Based on Improved YOLOv7. Sensors. 2023; 23(19):8304. https://doi.org/10.3390/s23198304
Chicago/Turabian StyleTian, Yunxiang, and Xiaolin Tian. 2023. "A New Lunar Dome Detection Method Based on Improved YOLOv7" Sensors 23, no. 19: 8304. https://doi.org/10.3390/s23198304
APA StyleTian, Y., & Tian, X. (2023). A New Lunar Dome Detection Method Based on Improved YOLOv7. Sensors, 23(19), 8304. https://doi.org/10.3390/s23198304