
A Design and Implementation Using an Innovative Deep-Learning Algorithm for Garbage Segregation


Abstract
:1. Introduction
- Image recognition: CNNs could be employed to identify and categorize waste items from images, facilitating automated sorting and recycling processes [17].
- Visual inspection: CNNs can be integrated into waste separation systems to visually inspect waste streams and separate recyclable materials from non-recyclables [18].
- Waste characterization: CNNs can assist in identifying hazardous waste or specific waste types that require specialized handling and disposal methods.
- Anomaly detection: CNNs can be used to detect irregularities in waste streams, such as prohibited items or contaminants, improving the overall quality of recycling processes. In the existing system, there are automated waste sorting systems that can employ various technologies, such as sensors, cameras, and artificial intelligence. However, there is a lack in this existing method; the garbage is not classified properly, and it requires more time to classify it [19]. It can be concluded that most of the current automated waste management systems using various hardware cannot identify and classify the image correctly, and it requires more time to classify it.
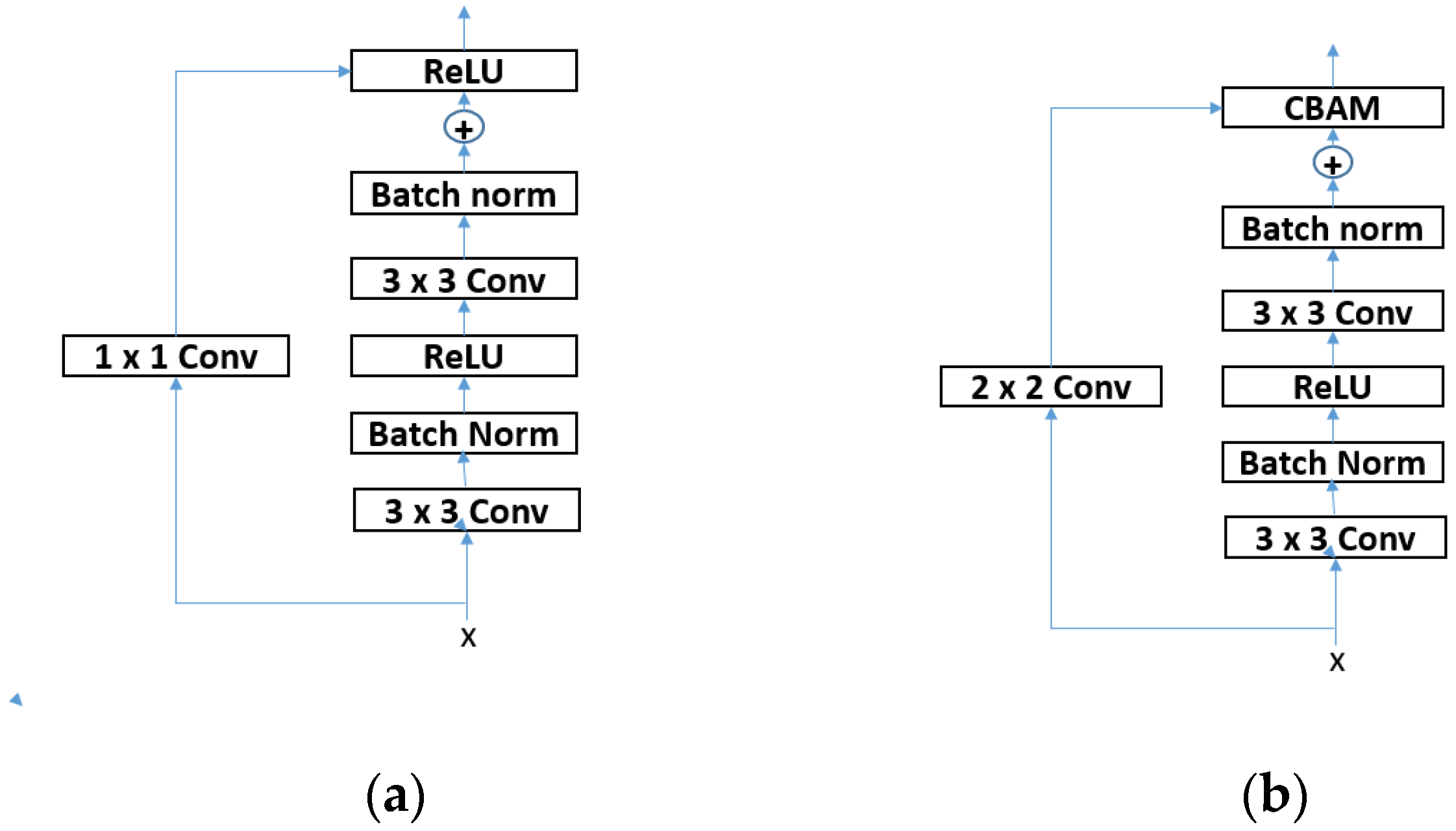
- An innovative technique to integrate two technologically modified ResNeXt and ResNet 50, which is implemented in the IoT and deep learning, guarantees an ideal solution in the field of waste management.
- Using deep learning to identify images is a clever method of separating biodegradable waste from non-biodegradable rubbish and hazardous waste.
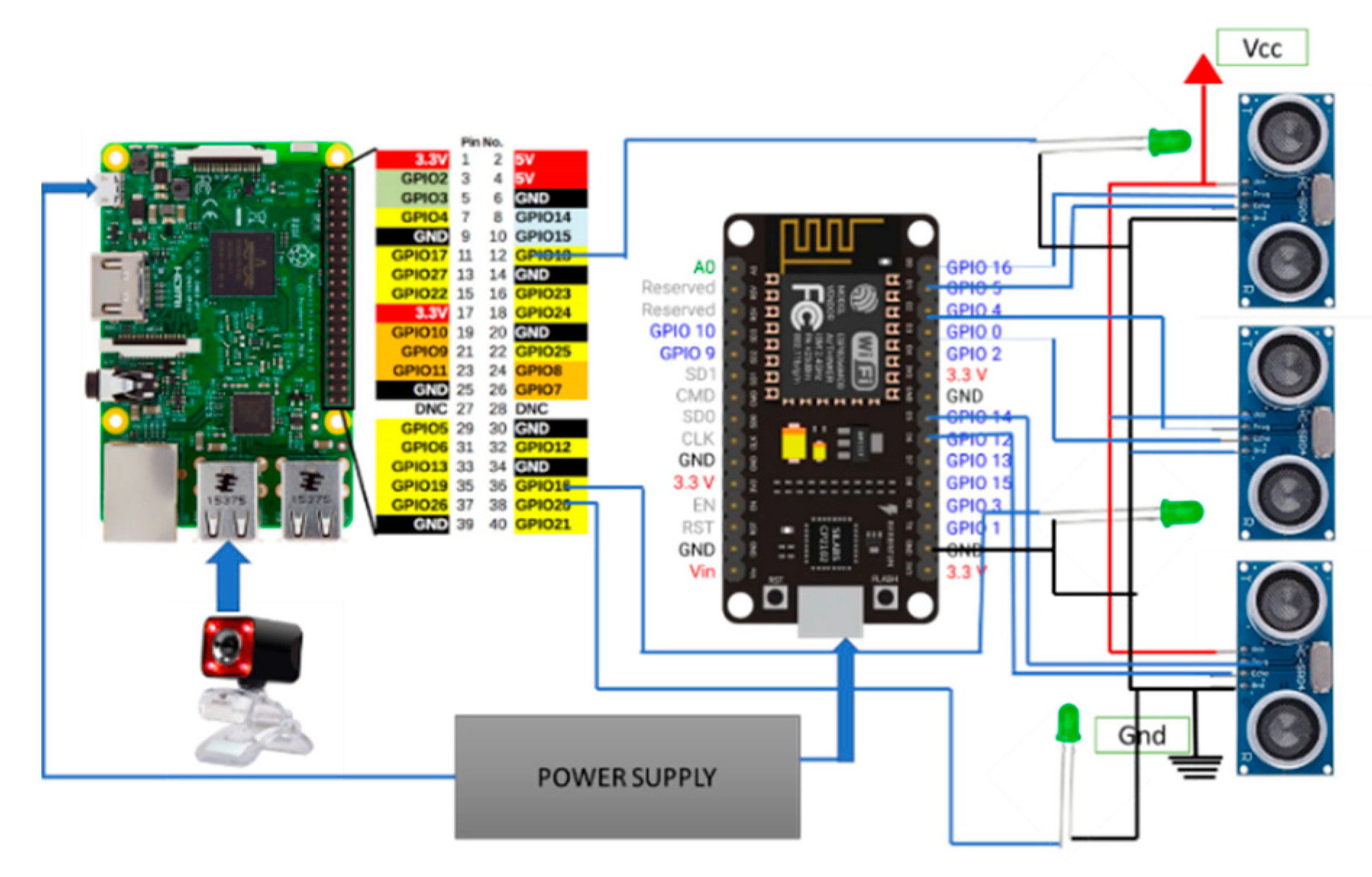
- A poisonous gas sensor, stepper motor, solar panel, load measurement sensor, and ultrasonic sensor are used in the architectural design of a smart garbage can.
- Using an application and Bluetooth for short-range and the Internet of Things for long-range monitoring of waste, respectively, the data is stored for further analysis.
2. Related Works
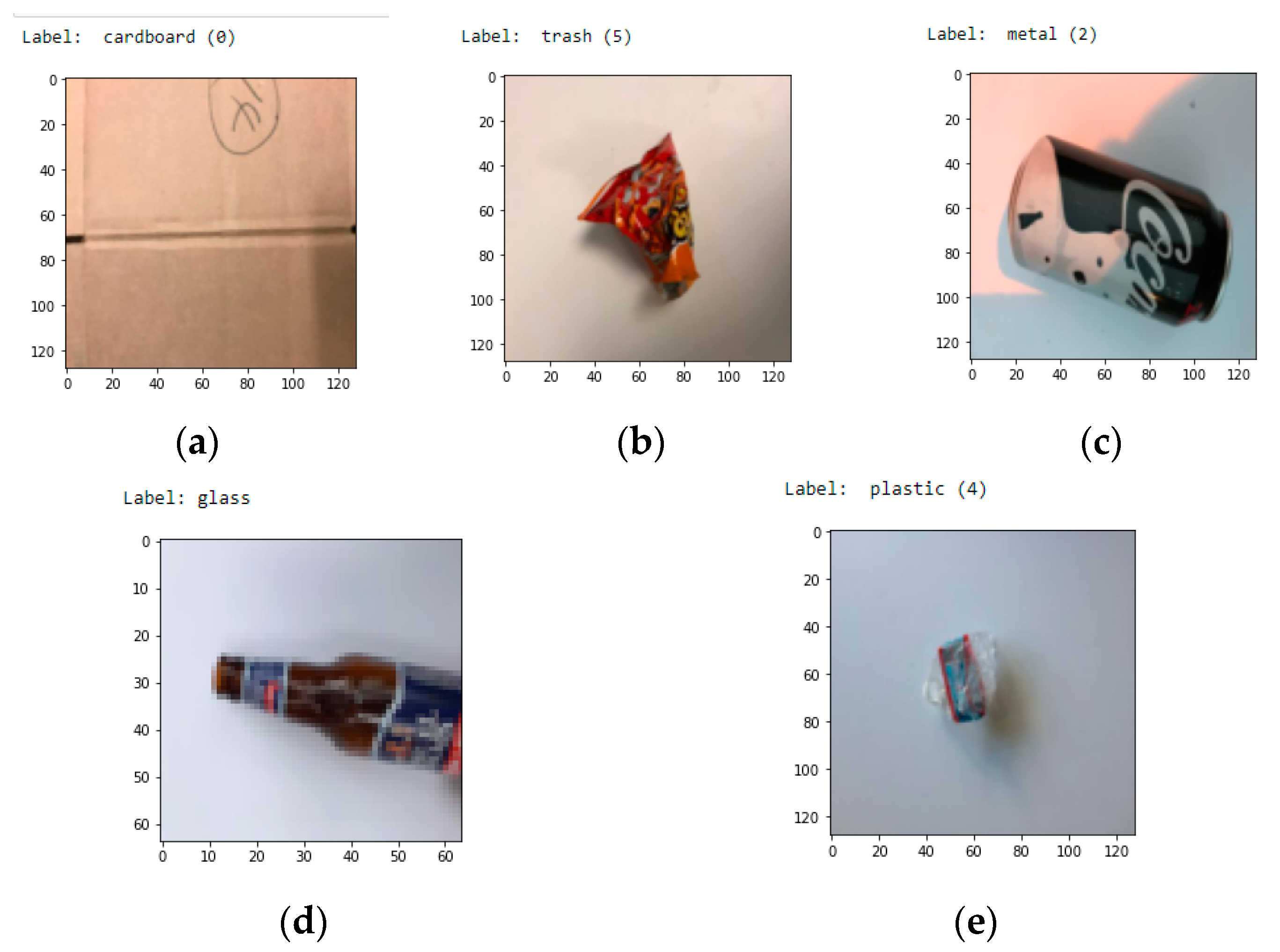
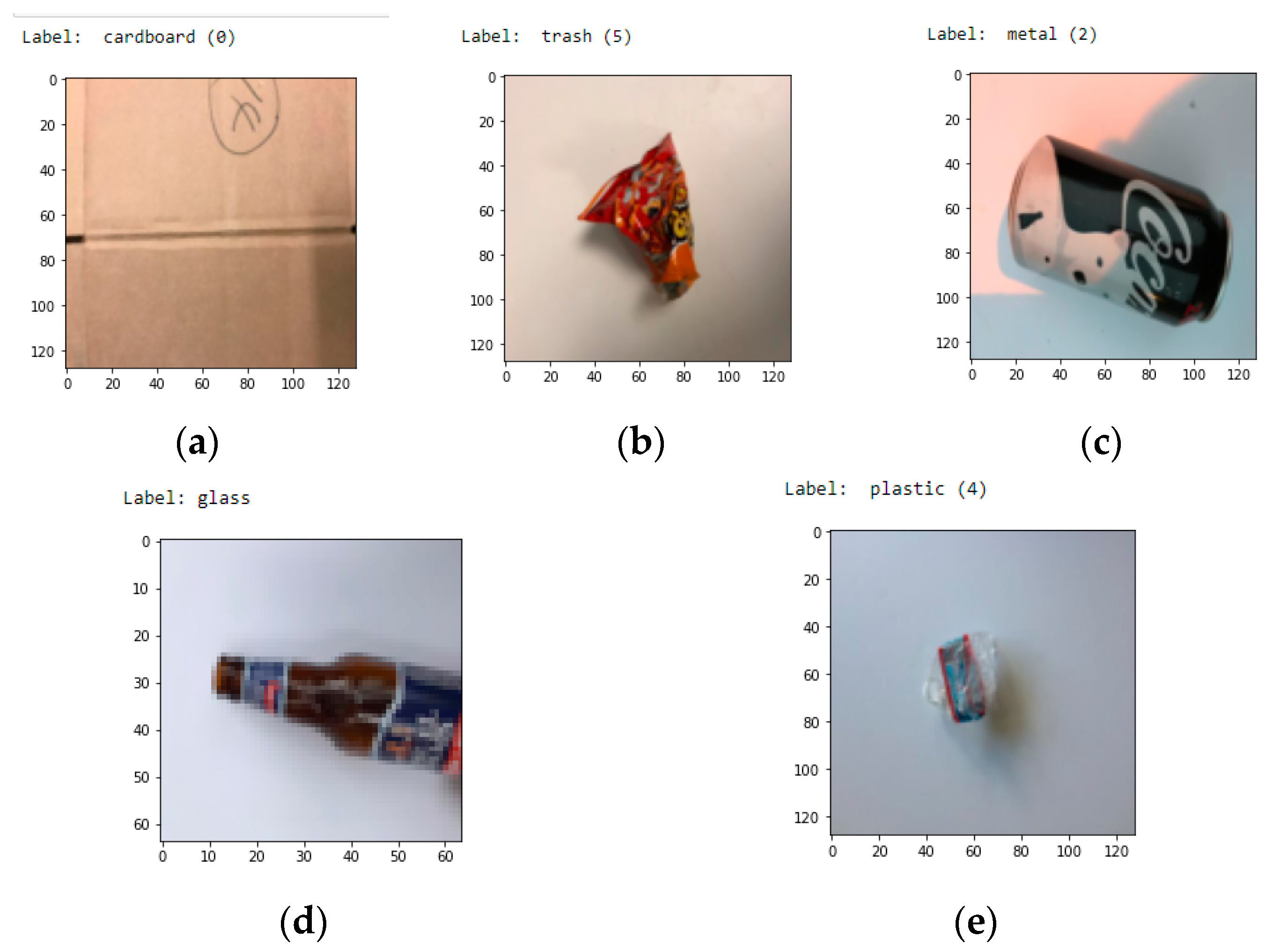
3. Dataset
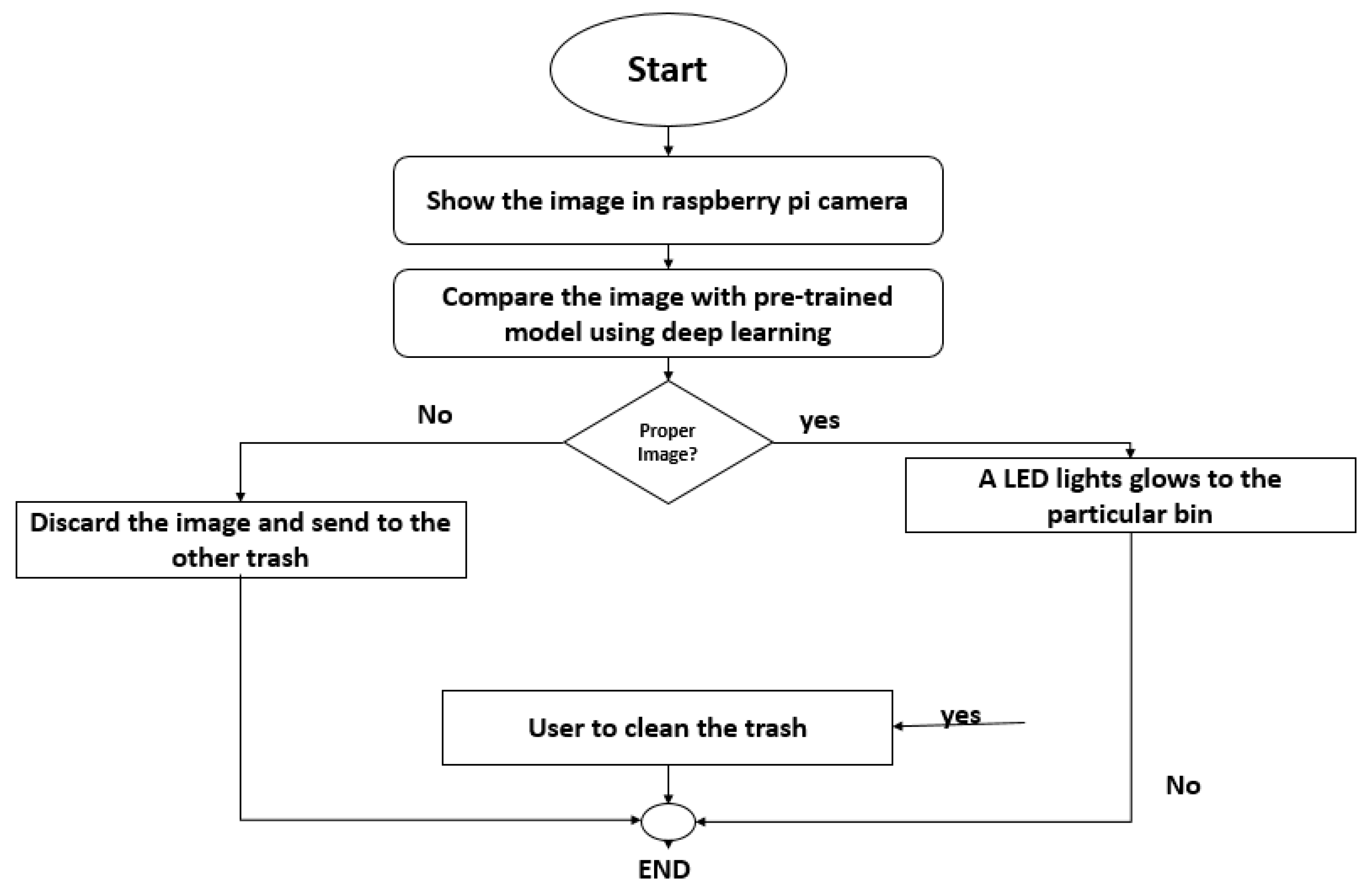
4. Proposed Methodology
- Initialization: The microcontroller initializes the ultrasonic sensor by sending a high-to-low signal at the trigger pin. This signal triggers the ultrasonic sensor to start generating sound waves.
- Sound wave generation: After receiving the trigger signal, the ultrasonic sensor generates eight 40 kHz sound waves. These sound waves travel from the sensor outward into the garbage bin.
- Echo detection: The ECHO pin of the ultrasonic sensor is turned high and continuously monitored. When the sound waves encounter an object, such as garbage, inside the smart bin, they bounce back (echo) to the sensor.
- Time measurement: The microcontroller uses Timer1 to measure the time taken for the sound waves to echo back to the sensor. This time duration is recorded for further calculations.
- Distance calculation: The calculated time duration is then used in the following equation to determine the distance (D) between the ultrasonic sensor and the object (garbage) in the smart bin:
Benefits of Proposed Smart Bin
- High capacity: The smart bin has a large capacity of 600 L, which is five times the capacity of typical 120 L bins. This high capacity reduces the frequency of waste collection rounds, saving time and resources.
- Automatic compaction: The smart bin is equipped with an internal compactor that automatically compresses the waste when it is full. This increases the trash capacity by 6 to 8 times that of a regular street bin, reducing the need for frequent emptying.
- Industry-leading hopper design: The hopper design of the smart bin is designed to keep waste confined, preventing insect access, waste overflow, and wind-blown litter. This helps maintain cleanliness and hygiene in public spaces.
- Significant waste reduction: The smart bin’s capacity and automatic compaction result in an average 86% reduction in street waste collected. This reduction in waste collection helps in efficient waste management and resource optimization.
- Real-time fill level monitoring: The smart bin is equipped with a sensing system that sends an email and text notification when the bin reaches 85% fullness. This real-time monitoring allows management and workers to plan waste collection rounds more effectively.
- Remote monitoring: Management and workers can observe the real-time fill levels of all smart bins on desktops and smartphones. This feature eliminates the need for traditional “milk round” type collection rounds, making waste collection more data-driven and efficient.
- Compostable-friendly: The smart bin is designed to support compostable waste collection with timely pickups and an enclosed design. This helps promote sustainable waste management practices.
- Elimination of overflowing bins: With the internal compactor and real-time monitoring, the smart bin effectively eliminates overflowing bins, preventing littering and maintaining cleanliness in public spaces.
- No electricity required: The smart bin does not require electricity for fullness-level sensing or communication. This makes it more energy-efficient and suitable for various locations, including areas with limited power resources.
- Smart bin security system: The smart bin is equipped with a security system that includes physical security plates to bar unauthorized access and a security management module to set up and manage security events effectively.
5. Hardware Required
5.1. Raspberry Pi Board
- Increased memory: It comes with 1 GB of RAM, providing more memory for running complex applications and handling larger data sets.
- Built-in wireless connectivity: The Raspberry Pi 3B has built-in Wi-Fi and Bluetooth capabilities, making it easier to connect to the internet and various wireless devices.
- Multiple USB ports: It has four USB ports, allowing users to connect various peripherals, such as keyboards, mice, external hard drives, and more.
- Ethernet port: The Raspberry Pi 3B includes an Ethernet port for wired network connectivity.
- HDMI output: It has an HDMI port for connecting to a monitor or TV, enabling users to use it as a desktop computer.
- GPIO pins: The Raspberry Pi 3B retains the GPIO (general purpose input/output) pins, which allow users to interface with various electronic components and sensors for electronic projects.
5.2. Ultra Sonic Sensor and Temperature Sensor
5.3. LCD Display and Solar Panel
5.4. Raspberry PI Camera
6. Experimental Results
7. Conclusions
8. Patent
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Prasanna, A.; Kaushal, S.V.; Mahalakshmi, P. Survey on identification and classification of waste for efficient disposal and recycling. Int. J. Eng. Technol. 2018, 7, 520. [Google Scholar] [CrossRef]
- Agarwal, C.; Yewale, B. Automatic Waste Segregation and Management. Int. J. Eng. Res. Technol. (IJERT) 2020, 9, 715–718. [Google Scholar]
- Devi, R.S.; Vijaykumar, V.R.; Muthumeena, M. Waste Segregation using Deep Learning Algorithm. Int. J. Innov. Technol. Explor. Eng. 2018, 8. [Google Scholar]
- Wang, C.-Y.; Yeh, I.-H.; Liao, H.-Y.M. You only learn one representation: Unified network for multiple tasks. arXiv 2021, arXiv:2105.04206. [Google Scholar]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. Available online: https://pjreddie.com/yolo/ (accessed on 2 July 2022).
- Saha, H.N.; Auddy, S.; Pal, S.; Kumar, S.; Pandey, S.; Singh, R.; Singh, A.K.; Banerjee, S.; Ghosh, D.; Saha, S. Waste Management using Internet of Things (IoT). In Proceedings of the 2017 8th Annual Industrial Automation and Electromechanical Engineering Conference (IEMECON), Bangkok, Thailand, 16–18 August 2017. [Google Scholar]
- Harika, K.; Muneerunnisa, V.R.; Rao, P.V.; SreeLakshmi, L.J.N. IOT Based Smart Garbage Monitoring and Alert System Using Arduino UNO. Int. J. Innov. Res. Comput. Commun. Eng. 2018, 6. [Google Scholar]
- Sejera, M.; Ibarra, J.B.; Canare, A.S.; Escano, L.; Mapanoo, D.C.; Suaviso, J.P. Standalone Frequency Based Automated Trash Bin and Segregator of Plastic Bottles and Tin Cans. In Proceedings of the 2016 IEEE Region 10 Conference (TENCON), Singapore, 22–25 November 2016. [Google Scholar]
- Chandra, S.S.; Kulshreshtha, M.; Randhawa, P. Garbage detection and path-planning in autonomous robots. In Proceedings of the 2021 9th International Conference on Reliability, Infocom Technologies and Optimization (Trends and Future Directions) (ICRITO), Noida, India, 3–4 September 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Yewange, M.; Gaikwad, K.; Kamble, R.; Maske, S.; Shahu, R. Real-Time Object Detection by using Deep Learning: A Survey. 2022. Available online: http://www.ijisrt.com (accessed on 26 July 2023).
- Morin, E.; Herrault, P.-A.; Guinard, Y.; Grandjean, F.; Bech, N. The promising combination of a remote sensing approach and landscape connectivity modelling at a fine scale in urban planning. Ecol. Indic. 2022, 139, 108930. [Google Scholar] [CrossRef]
- Sarker, N.; Chaki, S.; Das, A.; Forhad, M.S.A. Illegal trash thrower detection based on HOGSVM for a real-time monitoring system. In Proceedings of the 2021 2nd International Conference on Robotics, Electrical and Signal Processing Techniques (ICREST), Dhaka, Bangladesh, 5–7 January 2021; pp. 483–487. [Google Scholar] [CrossRef]
- Didelija, M.; Kulo, N.; Mulahusić, A.; Tuno, N.; Topoljak, J. Segmentation scale parameter influence on the accuracy of detecting illegal landfills on satellite imagery. A case study for Novo Sarajevo. Ecol. Inform. 2022, 70, 101755. [Google Scholar] [CrossRef]
- Bhandari, S. Automatic Waste Sorting in Industrial Environments via Machine Learning Approaches; Tampere Univ.: Tampere, Finland, 2020; Available online: https://trepo.tuni.fi/handle/10024/123574 (accessed on 26 July 2023).
- White, P.; Franke, M.; Hindle, P. Lifecycle inventory: A part of lifecycle assessment. In Integrated Solid Waste Management: A Lifecycle Inventory, 1st ed.; Springer: Boston, MA, USA, 1999; pp. 25–36. [Google Scholar] [CrossRef]
- Demirbas, A. Waste management, waste resource facilities and waste conversion processes. Energy Convers. Manag. 2011, 52, 1280–1287. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Jenilasree, G.; Shenbagavadivu, N.; Bhuvaneswari, M. A Simple Ensemble Learning Algorithm For a Real Time High Dimensional Data. In Emerging Technologies in Data Mining and Information Security; Lecture Notes in Networks and Systems book series; Springer: Singapore, 2021; Volume 164, pp. 21–32. [Google Scholar]
- Wang, J.; Zhang, T.; Cheng, Y.; Al-Nabhan, N. Deep learning for object detection: A survey. Comput. Syst. Sci. Eng. 2021, 38, 165–182. [Google Scholar] [CrossRef]
- Swetha, M.S.; Veena, M.S.; Muneshwara, M.S.; Thungamani, M. Survey of object detection using deep neural networks. Int. J. Adv. Res. Comput. Commun. Eng. 2018, 7, 19–24. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. arXiv 2015, arXiv:1506.02640. [Google Scholar]
- Ahmed, M.; Hashmi, K.A.; Pagani, A.; Liwicki, M.; Stricker, D.; Afzal, M.Z. Survey and performance analysis of deep learning based object detection in challenging environments. Sensors 2021, 21, 5116. [Google Scholar] [CrossRef] [PubMed]
- Rekha, B.S.; Marium, A.; Srinivasan, G.N.; Shetty, S.A. Literature survey on object detection using YOLO. Int. Res. J. Eng. Technol. 2020, 7, 3082–3088. Available online: https://www.irjet.net/archives/V7/i6/IRJET-V7I6576.pdf (accessed on 26 July 2023).
- Wang, W.; Lai, Q.; Fu, H.; Shen, J.; Ling, H.; Yang, R. Salient object detection in the deep learning era: An in-depth survey. IEEE Trans. Pattern Anal. Mach. Intell. 2022, 44, 3239–3259. [Google Scholar] [CrossRef] [PubMed]
- Ferrara, L.; Iannace, M.; Patelli, A.M.; Arienzo, M. Geochemical survey of an illegal waste disposal site under a waste emergency scenario (Northwest Naples, Italy). Environ. Monit. Assess. 2013, 185, 2671–2682. [Google Scholar] [CrossRef]
- Yang, T.; Xu, J.; Zhao, Y.; Gong, T.; Zhao, R.; Sun, M.; Xi, B. Classification technology of domestic waste from 2000 to 2019: A bibliometrics-based review. Environ. Sci. Pollut. Res. 2021, 28, 26313–26324. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, Q.; Jin, S.; Long, W.; Hu, L. A literature review of underwater image. In Frontiers in Artificial Intelligence and Applications; IOS Press: Amsterdam, The Netherlands, 2022; Volume 347, pp. 42–51. [Google Scholar] [CrossRef]
- Zhang, F.; Cao, C.; Li, C.; Liu, Y.; Huisingh, D. A systematic review of recent developments in disaster waste management. J. Clean. Prod. 2019, 235, 822–840. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. YOLOv4: Optimal speed and accuracy of object detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- YOLOv7: The Fastest Object Detection Algorithm. 2022. Available online: https://viso.ai/deep-learning/yolov7-guide/ (accessed on 26 July 2023).
- Dalal, N.; Triggs, B. Histograms of oriented gradients for human detection. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005; pp. 886–893. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Gupta, T.; Joshi, R.; Mukhopadhyay, D.; Sachdeva, K.; Jain, N.; Virmani, D.; Garcia-Hernandez, L. A Deep Learning approach based hardware solution to categorise garbage in environment. Complex Intell. Syst. 2021, 8, 1129–1152. [Google Scholar] [CrossRef]
- Malik, M.; Sharma, S.; Uddin, M.; Chen, C.L.; Wu, C.-M.; Soni, P. Waste Classification for Sustainable Development Using Image Recognition with Deep Learning Neural Network Models. Sustainability 2022, 14, 7222. [Google Scholar] [CrossRef]
- Al Duhayyim, M.; Eisa, T.A.E.; Al-Wesabi, F.N.; Abdelmaboud, A.; Hamza, M.A.; Zamani, A.S.; Rizwanullah, M.; Marzouk, R. Deep Reinforcement Learning Enabled Smart City Recycling Waste Object Classification. Comput. Mater. Contin. 2022, 71, 5699–5715. [Google Scholar] [CrossRef]
- Majchrowska, S.; Mikołajczyk, A.; Ferlin, M.; Klawikowska, Z.; Plantykow, M.A.; Kwasigroch, A.; Majek, K. Deep learning-based waste detection in natural and urban environments. Waste Manag. 2022, 138, 274–284. [Google Scholar] [CrossRef]
- Khan, R.; Kumar, S.; Srivastava, A.K.; Dhingra, N.; Gupta, M.; Bhati, N.; Kumari, P. Machine Learning and IoT-Based Waste Management Model. Comput. Intell. Neuro Sci. 2021, 2021, 5942574. [Google Scholar] [CrossRef]
- Shi, C.; Tan, C.; Wang, T.; Wang, L. A Waste Classification Method Based on a Multilayer Hybrid Convolution Neural Network. Appl. Sci. 2021, 11, 8572. [Google Scholar] [CrossRef]
- Rahman, M.W.; Islam, R.; Hasan, A.; Bithi, N.I.; Hasan, M.M.; Rahman, M.M. Intelligent waste management system using deep learning with IoT. J. King Saud Univ. Comput. Inf. Sci. 2022, 34, 2072–2087. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Rapid object detection using a boosted cascade of simple features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. CVPR 2001, Kauai, HI, USA, 8–14 December 2001; pp. 511–518. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. Available online: http://code.google.com/p/cuda-convnet/ (accessed on 2 July 2022).
- Wang, C.-Y.; Bochkovskiy, A.; Liao, H.-Y.M. YOLOv7: Trainable bag-of-freebies sets new state-of-the-art for real-time object detectors. arXiv 2022, arXiv:2207.02696. [Google Scholar]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, inception-ResNet and the impact of residual connections on learning. arXiv 2016, arXiv:1602.07261. [Google Scholar] [CrossRef]
- Jenilasree, G.; Shenbagavadivu, N.; Bhuvaneswari, M. A Study on Automatic Solid Waste Management System for Smart City. Int. J. Creat. Res. Thoughts 2017, 5, 1682–1689. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. Available online: http://imagenet.org/challenges/LSVRC/2015/ (accessed on 2 July 2022).
- Bircanoglu, C.; Atay, M.; Beser, F.; Genc, O.; Kizrak, M.A. RecycleNet: Intelligent waste sorting using deep neural networks. In Proceedings of the 2018 Innovations in Intelligent Systems and Applications (INISTA), Thessaloniki, Greece, 3–5 July 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context; Springer International Publishing: Berlin/Heidelberg, Germany, 2014; Volume 8693, pp. 740–755. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich feature hierarchies for accurate object detection and semantic segmentation. arXiv 2013, arXiv:1311.2524. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper Title | Authors | Year | Factors Examined | Compromises in Some Areas |
|---|---|---|---|---|
| A DL method-based hardware solution to categorize garbage in the environment | Tanya Gupta, Rakshit Joshi, Devarshi Mukhopadhyay et al. [33] | 2021 | The project aims to identify the best-performing CNN model that can be integrated into the hardware-based waste segregation system. By leveraging the power of pre-trained CNNs, the smart bin can accurately categorize different types of waste, enabling efficient waste management, recycling efforts, and a cleaner environment. The findings of the project can have significant implications for improving waste management practices and contributing to sustainable waste disposal strategies. | Minimizing time gaps by cutting back on delays in the system can be a viable approach to improving efficiency, but it should be done with careful consideration of the overall performance and accuracy of the waste segregation system. |
| Waste classification for sustainable development using image recognition with deep learning neural network models | Meena Malik, Sachin Sharma, Mueen Uddin, Chin Ling Chen, Chih-ming Wu, Punit Soni [34] | 2022 | The combination of fine-tuning techniques, hardware-based implementation on the Raspberry Pi, and efficient use of computational resources contribute to the success of the suggested method. The 4X improvement in FLOPS efficiency and the ability to create makeshift categories demonstrate the advancements made in waste categorization and smart waste management using this approach. | Implementing the waste categorization model as part of a smart city project comes with various challenges and considerations. Addressing these challenges requires collaborative efforts from stakeholders, including waste management authorities, technology providers, city planners, and the public. By overcoming these issues, the implementation of the waste categorization model as part of a smart city project can contribute to more efficient waste management, reduced environmental impact, and a cleaner and more sustainable urban environment. |
| Deep Reinforcement Learning Enabled Smart City Recycling Waste Object Classification | Mesfer Al Duhayyim, Taiseer Abdalla Elfadil Eisa, et al. [35] | 2022 | The suggested method aims to achieve accurate and efficient waste categorization. This method has the potential to significantly enhance waste management practices, as it allows for automated and intelligent waste sorting, promoting recycling and more effective waste disposal strategies. The six waste classes defined by the method provide valuable insights to waste management authorities, enabling better decision-making and resource optimization in waste collection and recycling efforts. | When compared to EfficientNet models, the accuracy in the top-1 is much lower. Furthermore, overfitting and underfitting might occur during the training of the waste category models using a core CNN. |
| Deep learning-based waste detection in natural and urban environments | Sylwia Majchrowska, Agnieszka Mikołajczyk, Marta A. Plantykow [36] | 2022 | The study offers a method for locating rubbish in metropolitan environments while taking into account the possibility that the waste may be present indoors, outdoors, or underwater. | The model does not account for the possibility of localizing any object with dimensions that are extremely small in comparison to surrounding objects. Cigarette buts, tiny particles of debris, etc., are examples of this. |
| Machine Learning and IoT-Based Waste Management Model | Rijwan Khan, Santosh Kumar, Akhilesh Kumar, Srivastava [37] | 2021 | The hardware prototypes and intelligent waste management strategies presented in the research aim to contribute to a pollution-free and clean environment. By leveraging ML and IoT technologies, waste management can be streamlined, waste segregation can be improved, and appropriate disposal methods can be implemented, ultimately leading to a healthier and more sustainable environment. | The solid waste management architecture, the proposed model, can contribute to improved efficiency, reduced environmental impact, and overall effectiveness in waste management practices. Its integration into the larger waste management system can lead to more sustainable waste management processes and contribute to creating cleaner and healthier environments. |
| A Waste Classification Method Based on a Multilayer Hybrid Convolution Neural Network | Cuiping Shi, Cong Tan, Tao Wang, Liguo Wang [38] | 2021 | The suggested methods leverage ML-based image classification techniques to automatically identify and sort trash items into the appropriate waste categories. The use of such advanced technologies helps streamline waste management processes, reduces human effort, and contributes to better environmental protection by promoting recycling and appropriate waste disposal methods. | Additionally, achieving the required accuracy in multiclass categorization is crucial for reliable waste sorting and proper disposal. Further research and development may be necessary to address these limitations and improve the suggested approaches. This could involve exploring more sophisticated machine learning algorithms, increasing the size and diversity of the training dataset, or optimizing the image processing techniques used in waste categorization. |
| Intelligent waste management system using deep learning with IoT | Md. Wahidur Rahman, Rahabul Islam, Arafat Hasan [39] | 2022 | The classification accuracy of the proposed architecture, depending on the CNN model, is 95.3125 percent, and its SUS score is 86 percent. However, with real-time waste monitoring, this intelligent system would be adaptable to household activities. | The answer will be more effective, and the accuracy of the plan will also be increased. Future iterations of this research will address these three issues to guarantee even better outcomes in the area of waste management. |
| Class Label Sub-Label | Biodegradable | Non-Biodegradable | Total Images | |||||
|---|---|---|---|---|---|---|---|---|
| Organic Waste | Cardboard | Paper | Metal | Glass | Plastic | Other Trash | ||
| No of images | 2150 | 18,405 | 1859 | 1700 | 1900 | 2500 | 1000 | 10,314 |
| Class | Number of Test Images | Accuracy (%) |
|---|---|---|
| Cardboard | 78 | 99.72% |
| Glass | 64 | 97.93% |
| Metal | 53 | 98.44% |
| Paper | 56 | 98.58% |
| Plastic | 48 | 99.63% |
| Trash | 20 | 98.97% |
| CNN Model | 20 Epochs Error | Time (s) | 30 Epoch Error | Time (s) |
|---|---|---|---|---|
| ResNet 50 | 0.05312 | 1196 | 0.06489 | 2153 |
| Vgg 16 | 0.07469 | 1220 | 0.06897 | 2384 |
| AlexNet | 0.3187 | 998 | 0.18695 | 1569 |
| Modified ResNeXt | 0.2156 | 875 | 0.15689 | 1028 |
| ResNet 50 and Modified ResNeXt | 0.20107 | 856 | 0.14368 | 986 |
| S.no | Component | Type | Quantity |
|---|---|---|---|
| 1 | Camera | Low sensitive camera | 1 |
| 2 | Ultrasonic sensor | 6 | |
| 3 | Temperature sensor | 6 | |
| 4 | Bin | Plastic | 1 |
| 5 | Circuit board | Raspberry Pi 3B | 1 |
| 6 | Battery | Low | 1 |
| Proposed Method | |||
| 1 | Camera | Pi camera | 1 |
| 2 | Bin | Stainless steel | |
| 3 | Solar panel | ||
| 4 | Circuit board | Raspberry Pi 3B | 1 |
| 5 | Ultrasonic sensor | 6 | |
| 6 | Temperature sensor | 6 | |
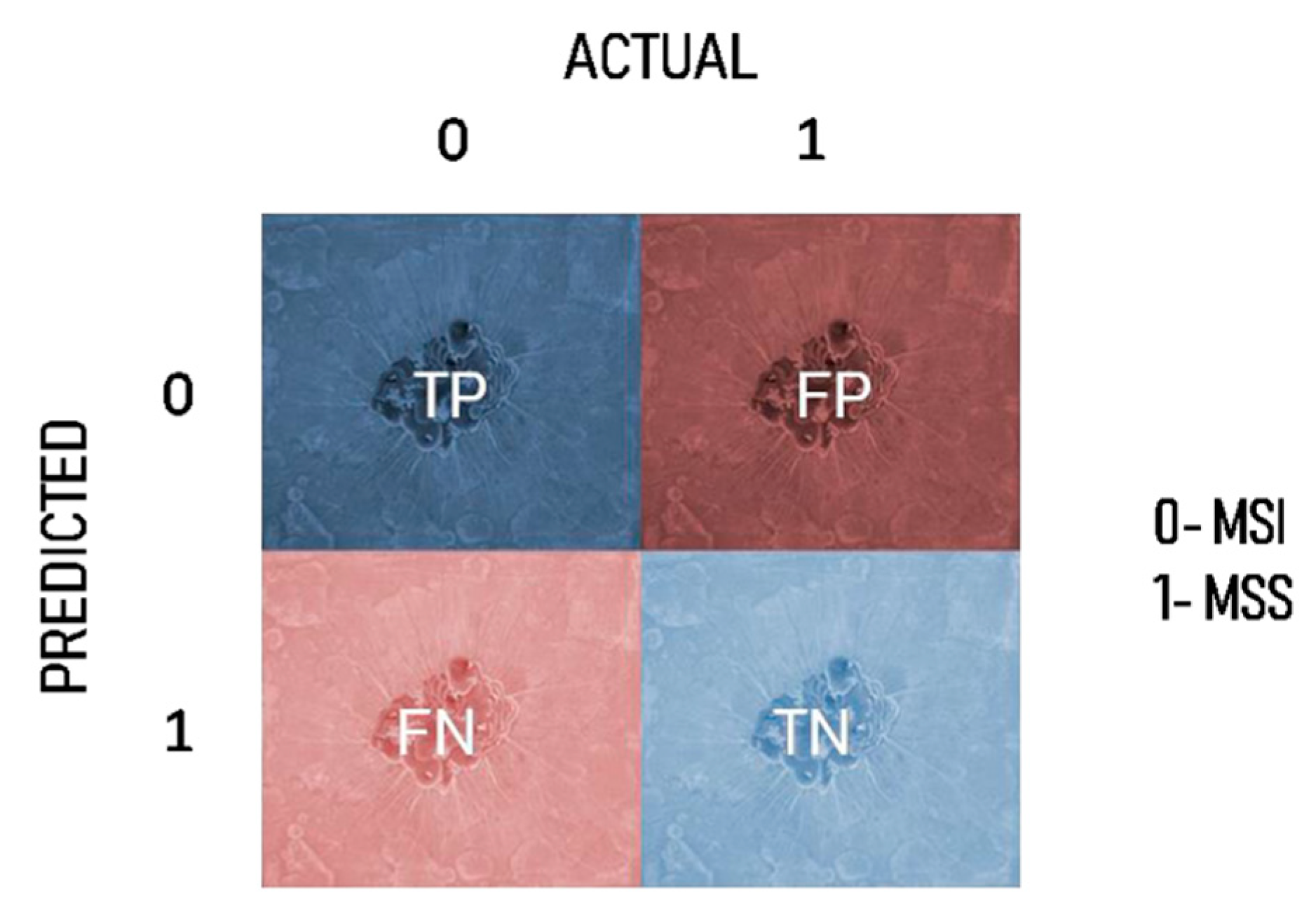
| Model | True Positive (TP) | False Positive (FP) | False Negative (FN) | True Negative (TN) |
|---|---|---|---|---|
| Convolution Neural Network | 5880 | 1625 | 1855 | 9873 |
| VGG16 | 0 | 7505 | 0 | 11,728 |
| ResNet 50 | 6164 | 1341 | 972 | 10,756 |
| ResNeXt | 5940 | 1565 | 950 | 10,778 |
| Modified ResNeXt | 6329 | 1153 | 789 | 10,785 |
| Modified ResNeXt (Proposed Model) | 6338 | 1167 | 792 | 10,936 |
| Time Delay (min) | Waste Level (cm) | Empty Level (%) | Weight of the Waste (kg) | |
|---|---|---|---|---|
| 1 | 1.0 | 5.00 | Above 90% | 0.500 |
| 2 | 2.5 | 9.32 | Above 89% | 0.647 |
| 3 | 5.5 | 17.4 | Above 70% | 0.879 |
| 4 | 10.0 | 29.0 | Below 20% | 1.999 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gunaseelan, J.; Sundaram, S.; Mariyappan, B. A Design and Implementation Using an Innovative Deep-Learning Algorithm for Garbage Segregation. Sensors 2023, 23, 7963. https://doi.org/10.3390/s23187963
Gunaseelan J, Sundaram S, Mariyappan B. A Design and Implementation Using an Innovative Deep-Learning Algorithm for Garbage Segregation. Sensors. 2023; 23(18):7963. https://doi.org/10.3390/s23187963
Chicago/Turabian StyleGunaseelan, Jenilasree, Sujatha Sundaram, and Bhuvaneswari Mariyappan. 2023. "A Design and Implementation Using an Innovative Deep-Learning Algorithm for Garbage Segregation" Sensors 23, no. 18: 7963. https://doi.org/10.3390/s23187963
APA StyleGunaseelan, J., Sundaram, S., & Mariyappan, B. (2023). A Design and Implementation Using an Innovative Deep-Learning Algorithm for Garbage Segregation. Sensors, 23(18), 7963. https://doi.org/10.3390/s23187963