
Advancing Stepped-Waveform Radar Jamming Techniques for Robust False-Target Generation against LFM-CFAR Systems

Abstract
:1. Introduction
2. Delay Forwarding Method for Multiple False Target Jamming Using Step Wave Frequency Modulation
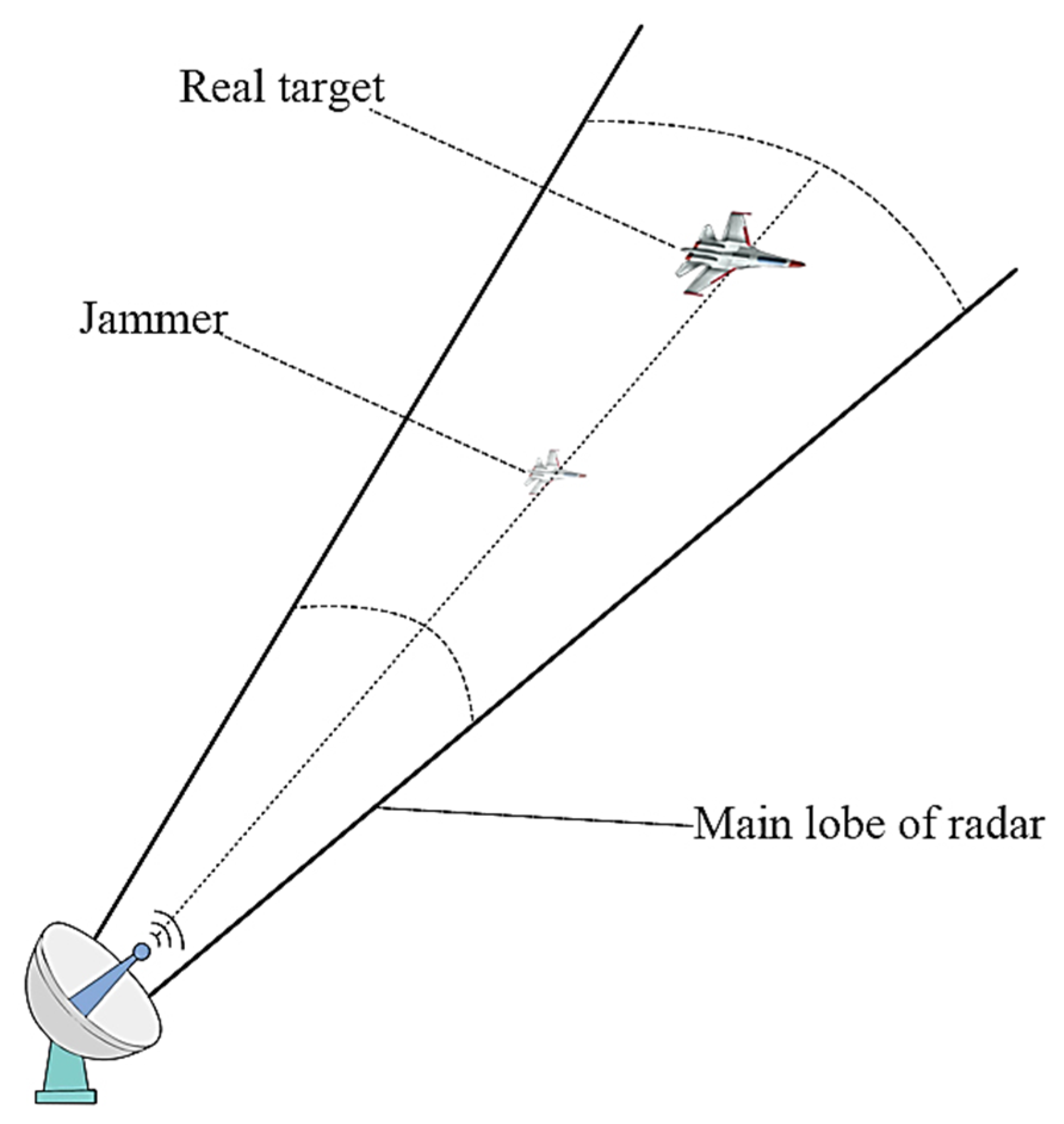
2.1. Jamming Countermeasure Scenario
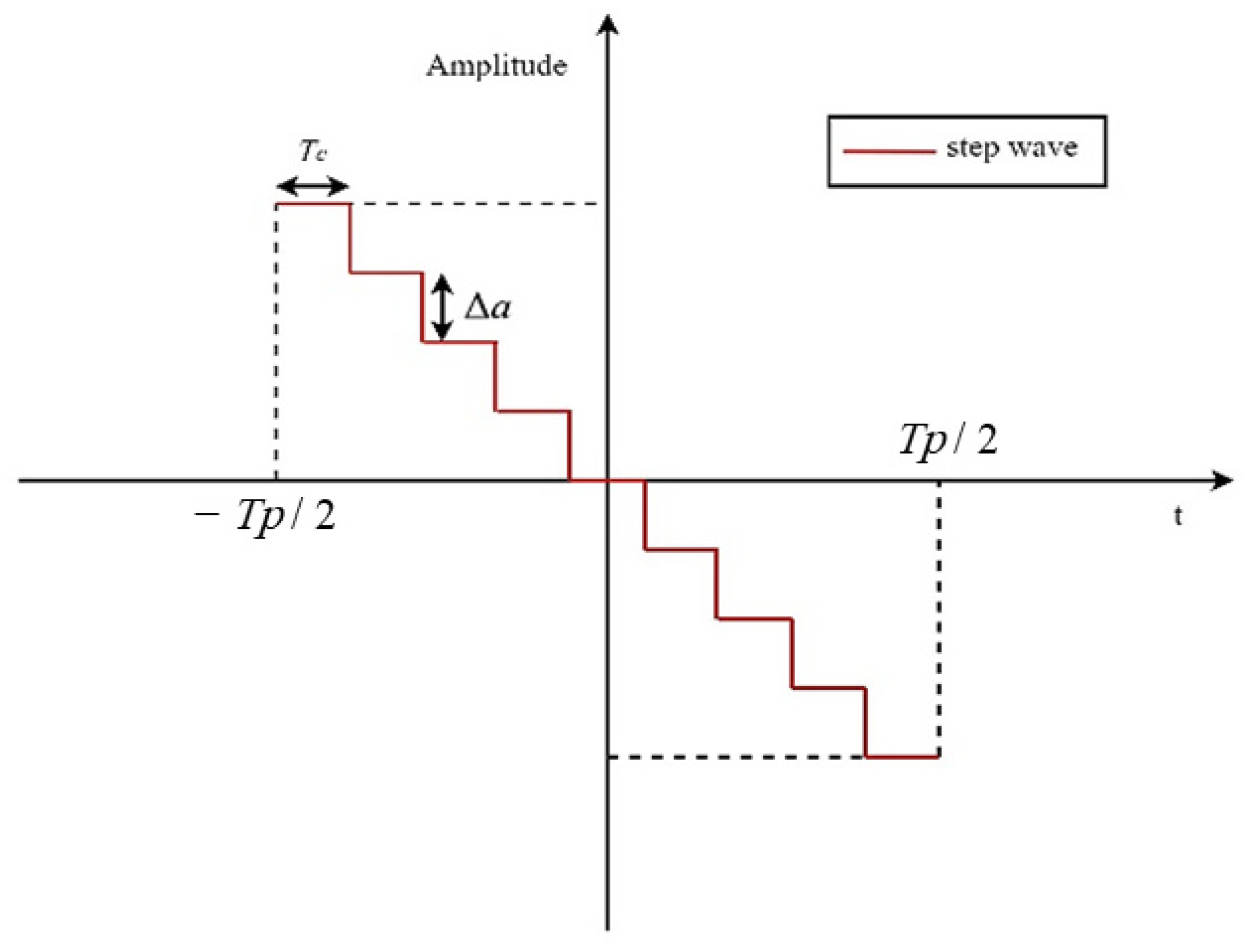
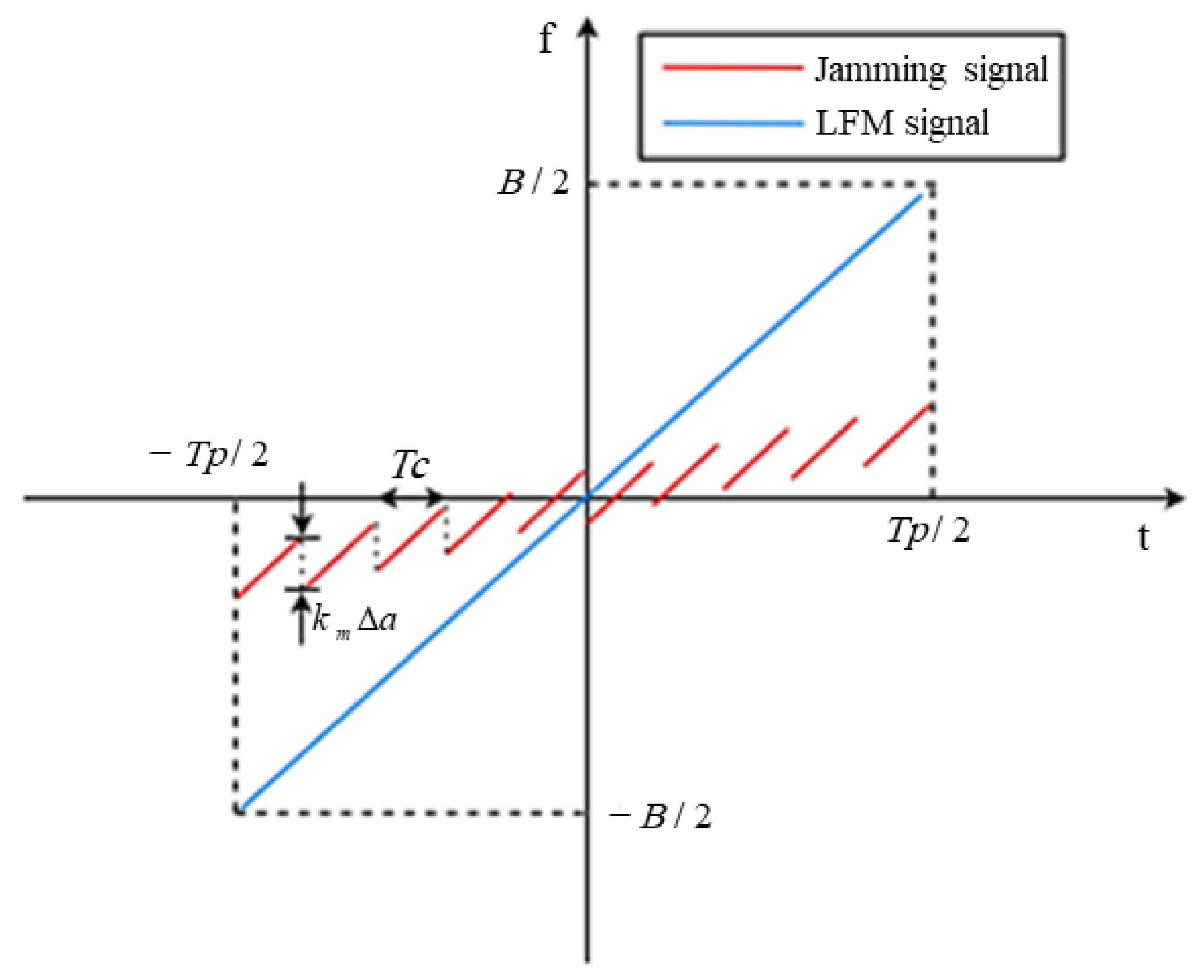
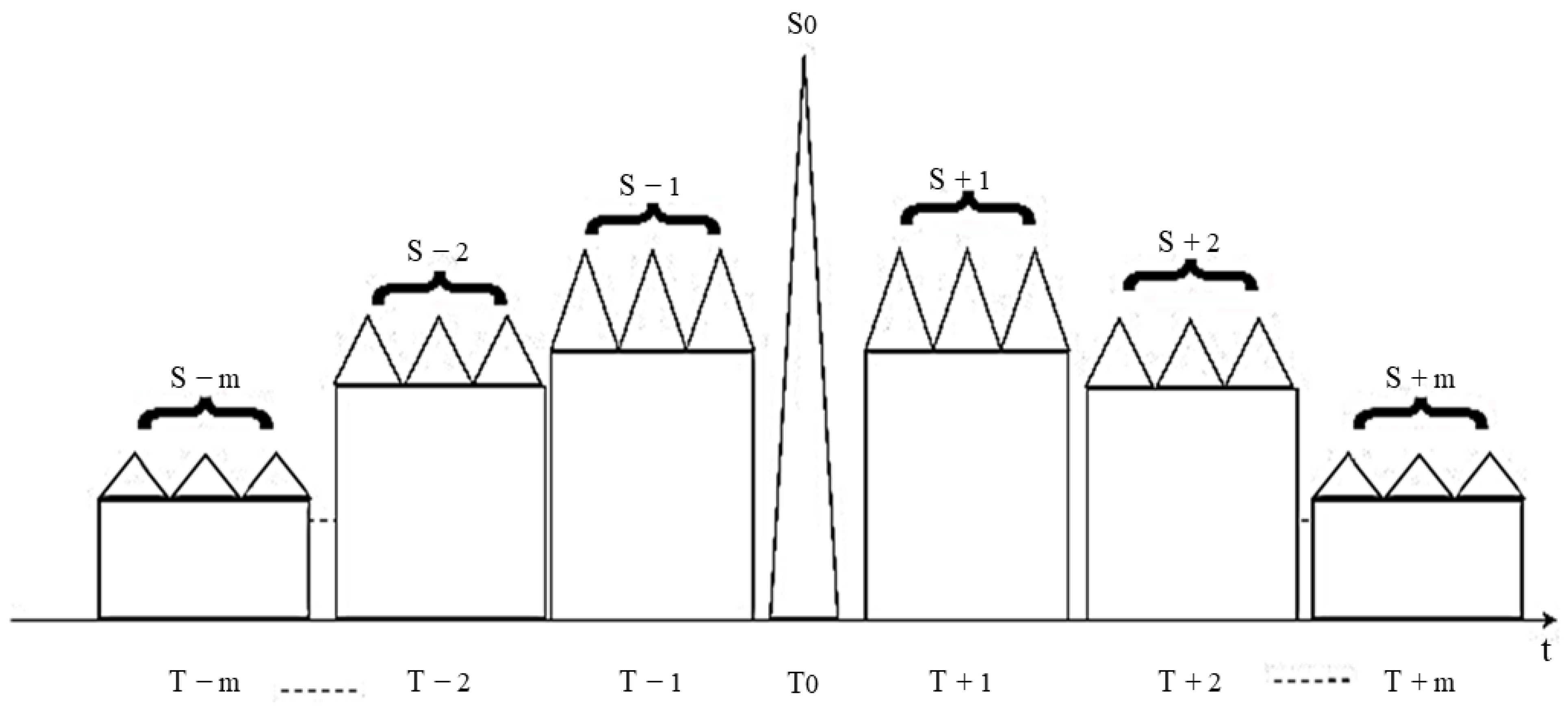
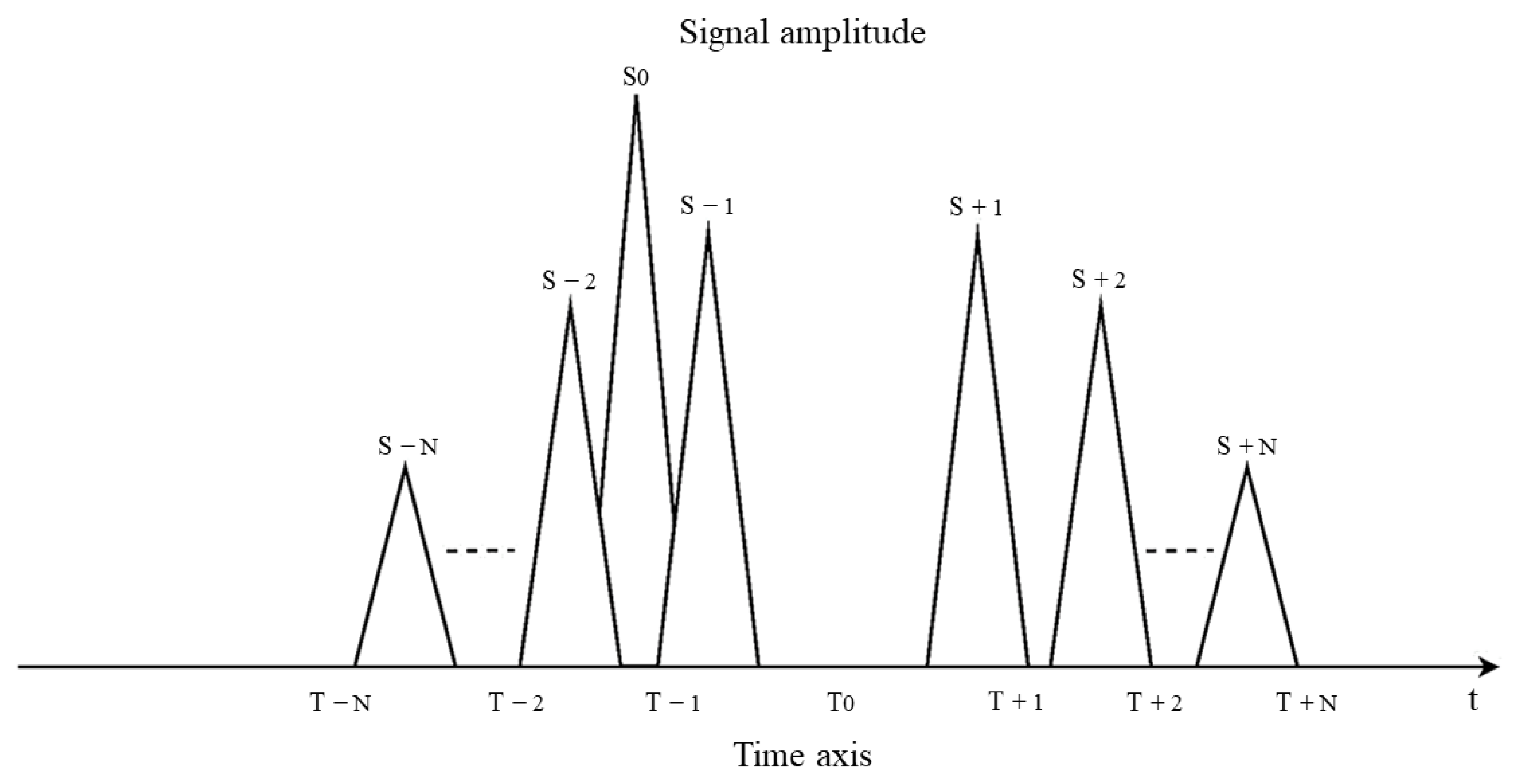
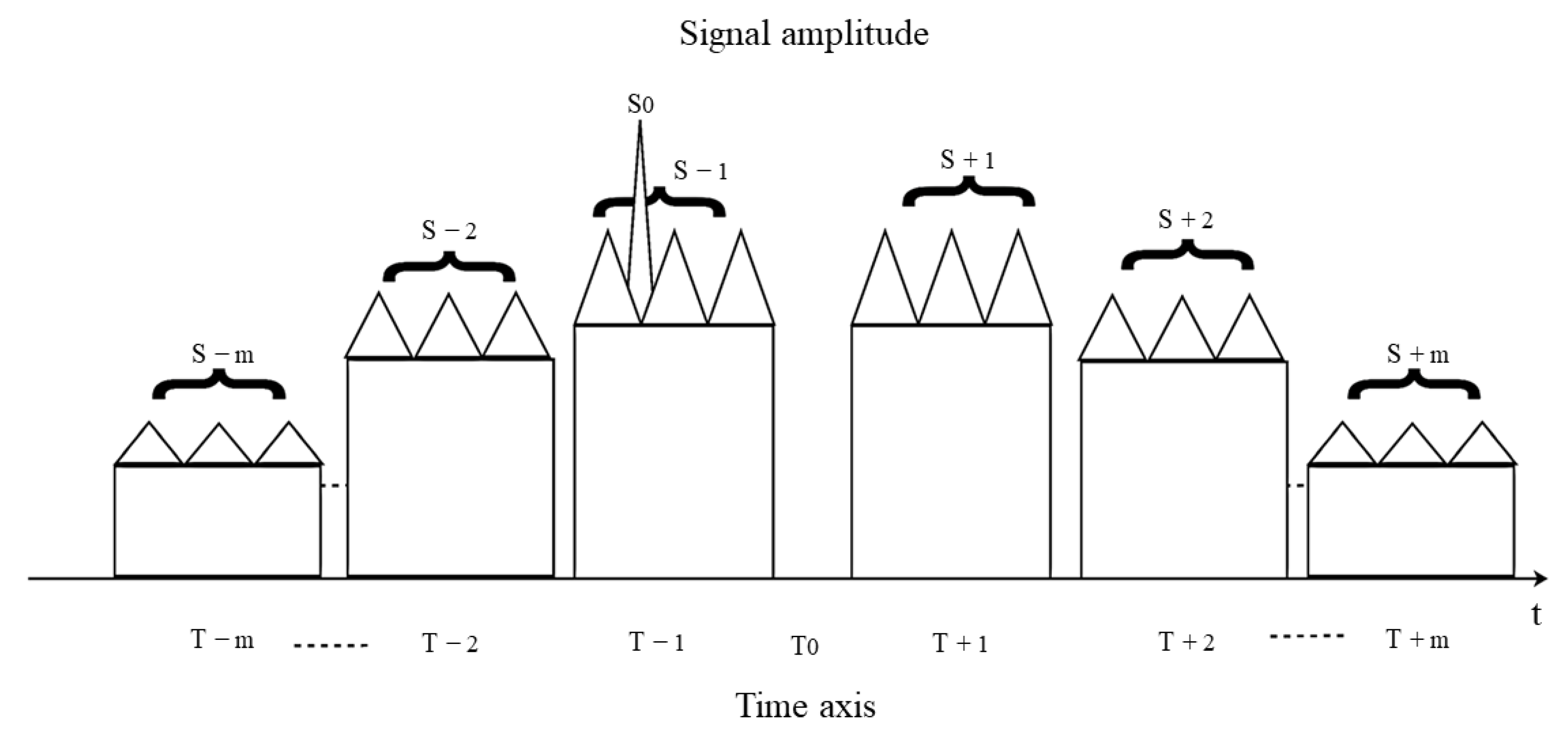
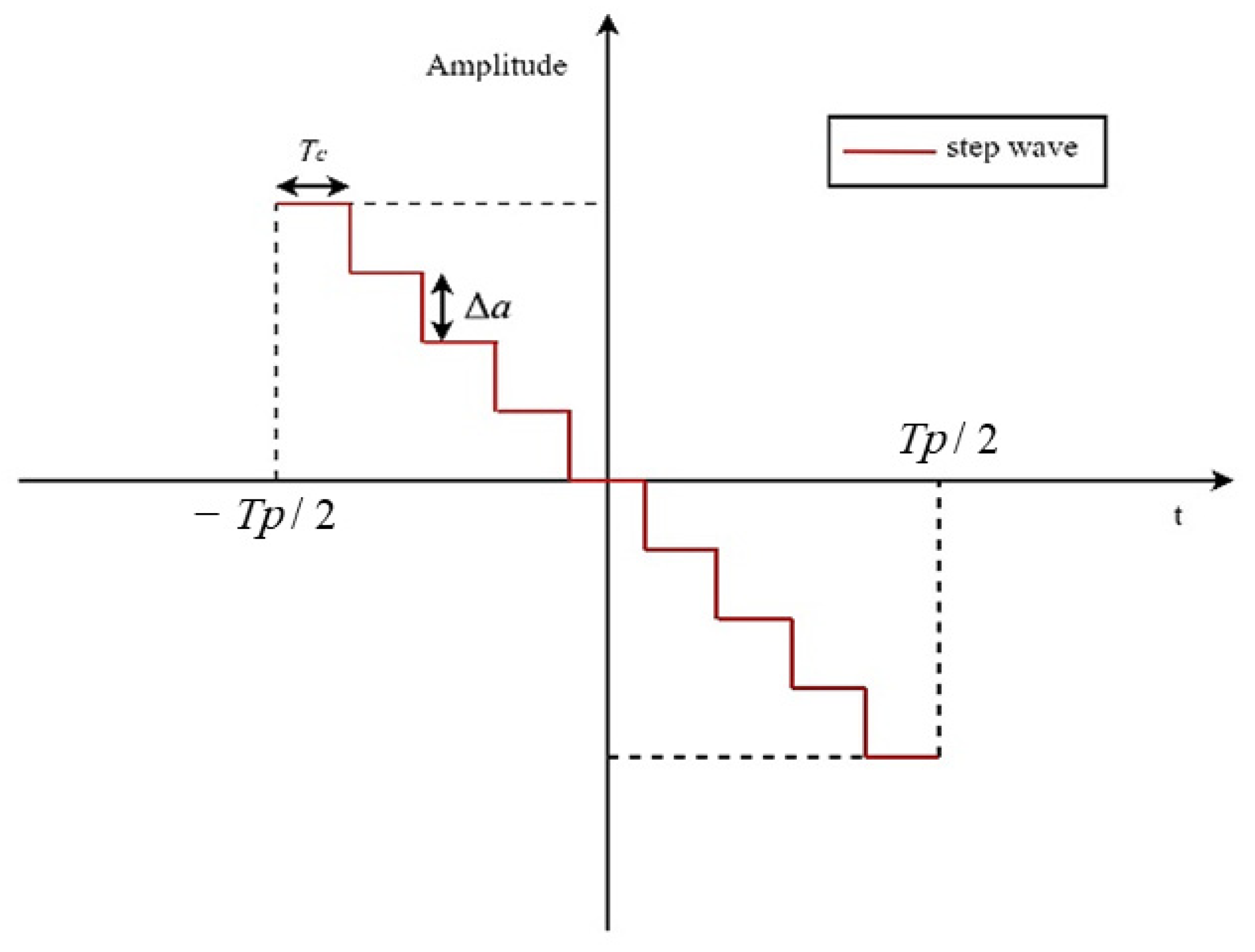
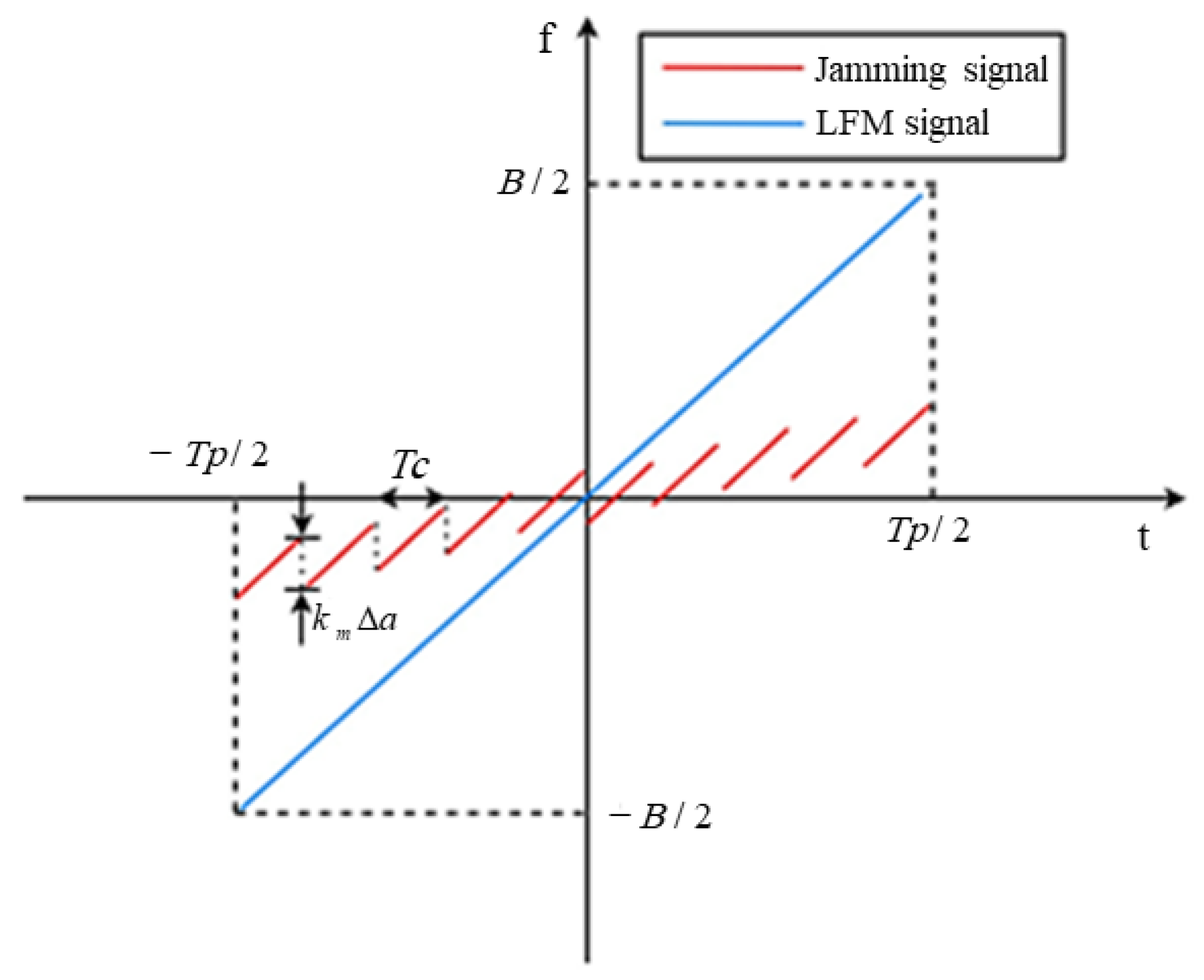
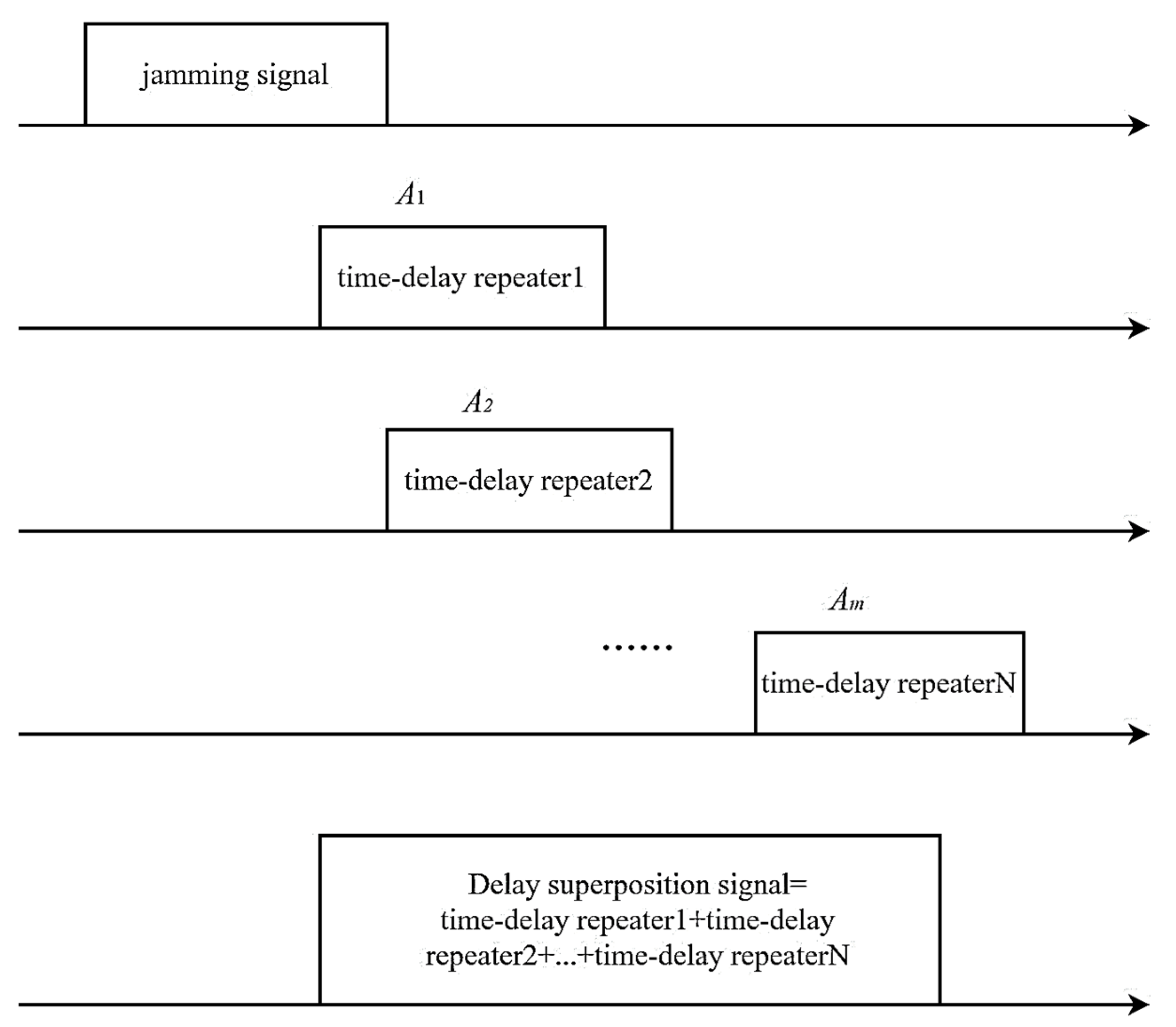
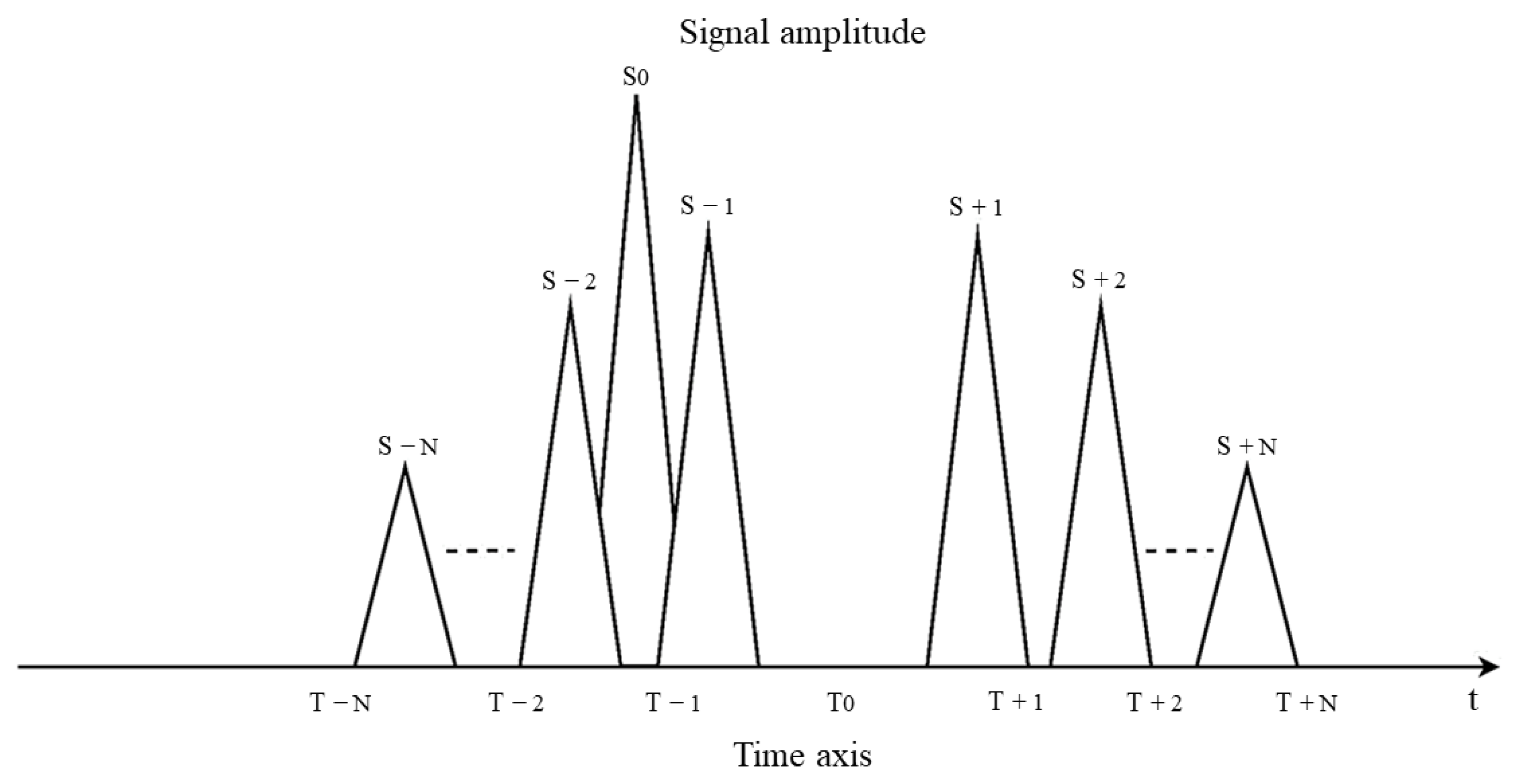
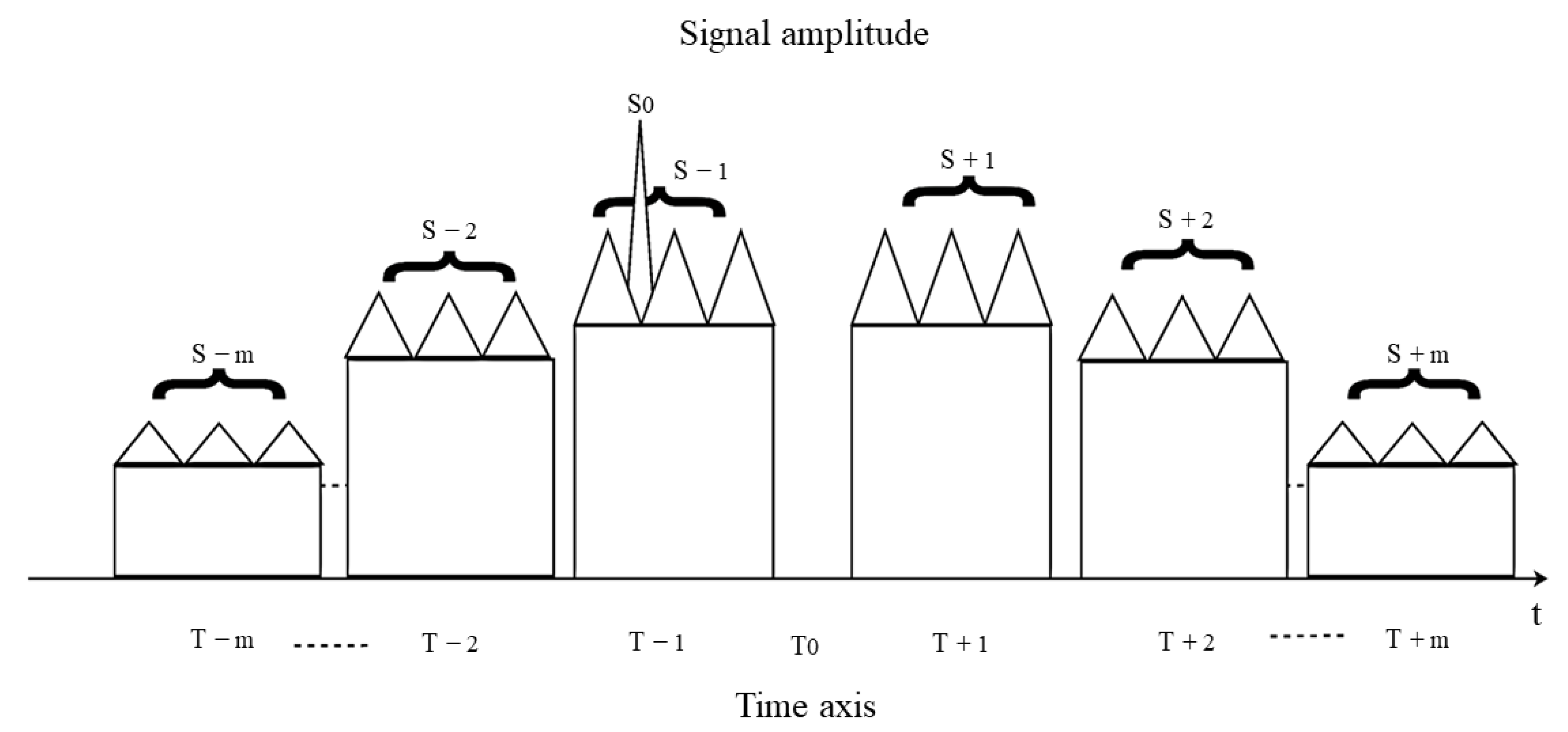
2.2. Delay Superposition Principle for Step Wave Frequency Modulation Jamming
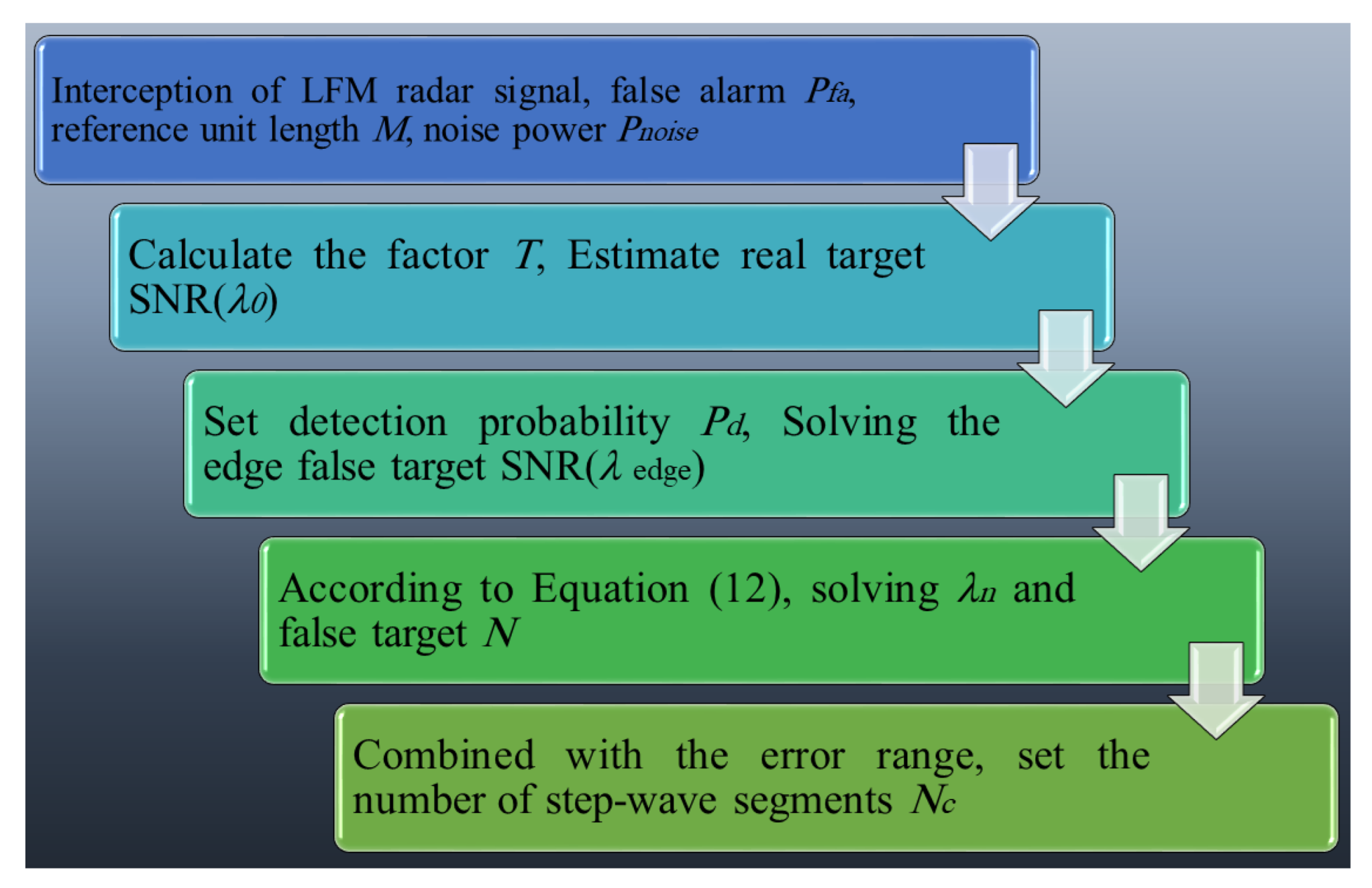
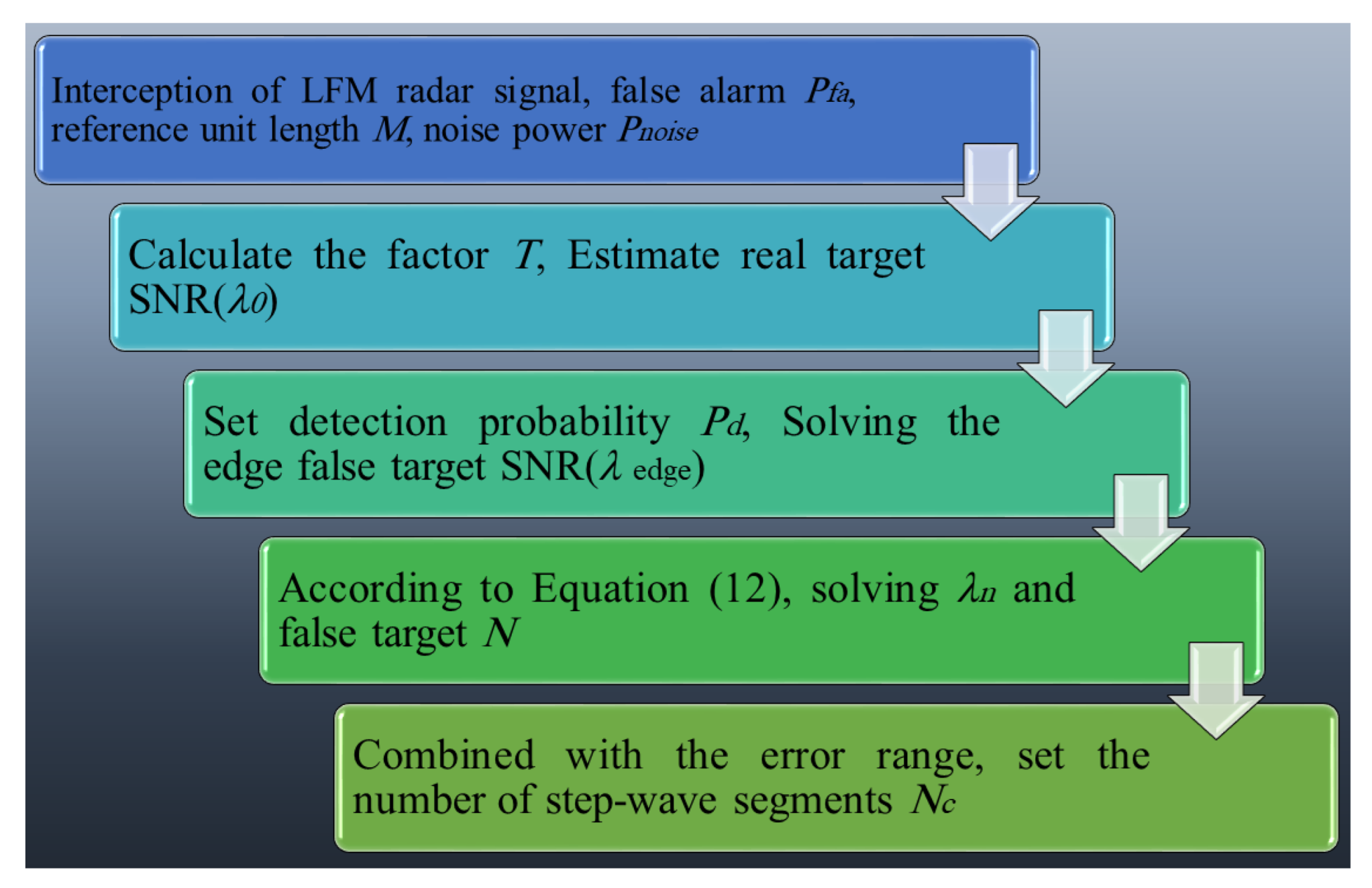
3. Jamming Parameter Design
3.1. Edge False Target SNR Calculation
3.2. Calculation of False Target Number and SNR after Detection
4. Jamming Effect Analysis
4.1. Jamming Effect with Real Target Estimation Position Error
4.2. Jamming Effect with Errors in Real Target SNR and Position Estimation
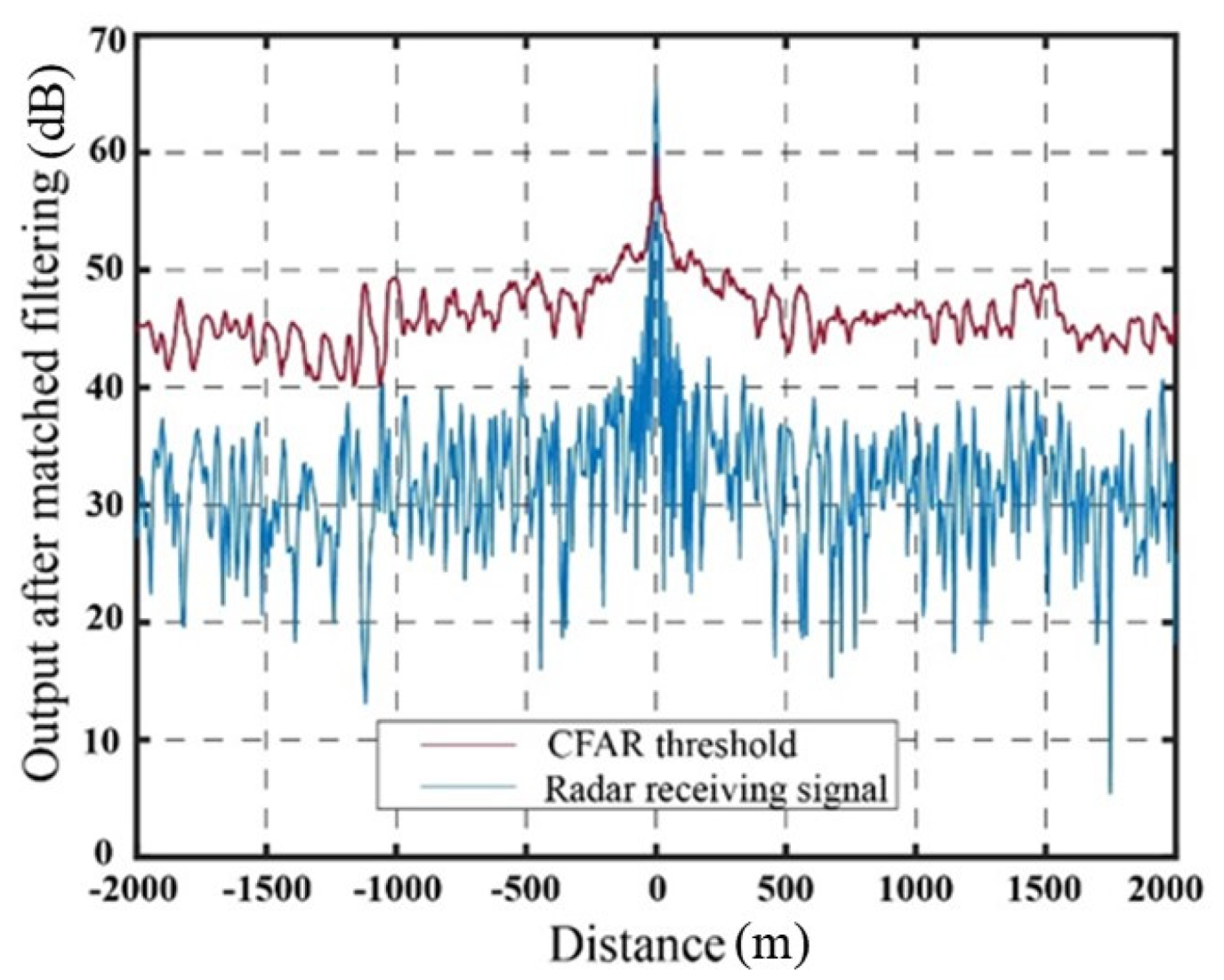
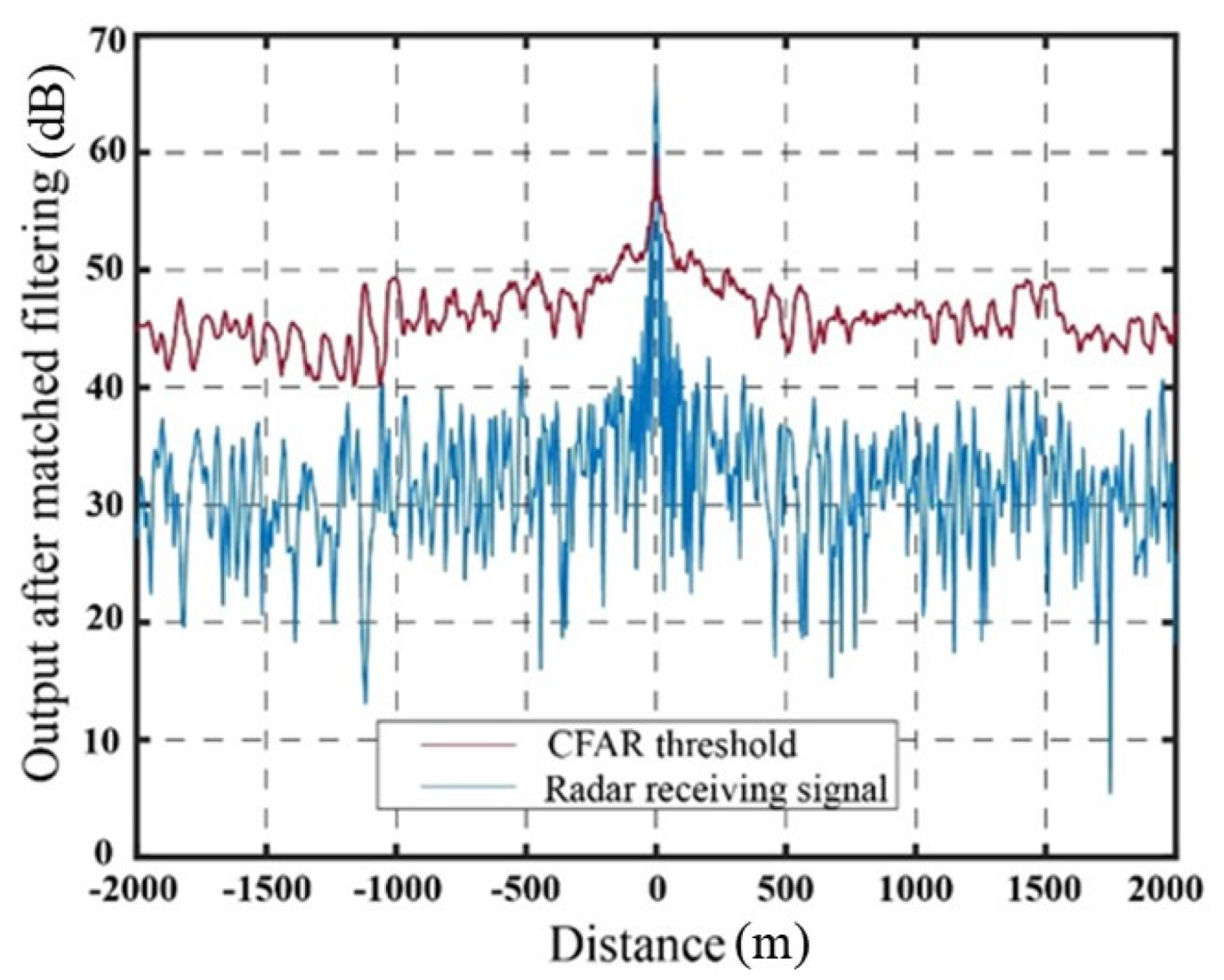
5. Simulation Results and Analysis
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, C.; Cong, Y.; Zhang, L.; Guo, D.; Wei, S. A Practical Deceptive Jamming Method Based on Vulnerable Location Awareness Adversarial Attack for Radar HRRP Target Recognition. IEEE Trans. Inf. Forensics Secur. 2022, 17, 2410–2424. [Google Scholar] [CrossRef]
- Rao, B.; Gu, Z.; Nie, Y. Deception approach to track-to-track radar fusion using noncoherent dual-source jamming. IEEE Access 2020, 8, 50843–50858. [Google Scholar] [CrossRef]
- Tan, M.; Wang, C.; Xue, B.; Xu, J. A novel deceptive jamming approach against frequency diverse array radar. IEEE Sens. J. 2020, 21, 8323–8332. [Google Scholar] [CrossRef]
- Wang, X.; Liu, J.; Zhang, W.; Fu, Q.; Liu, Z.; Xie, X. Mathematic principles of interrupted-sampling repeater jamming (ISRJ). Sci. China Ser. F Inf. Sci. 2007, 50, 113–123. [Google Scholar] [CrossRef]
- Wu, X.; Wang, X.; Lu, H. Study of intermittent sampling repeater jamming to SAR. J. Astronaut 2009, 30, 2043–2048. [Google Scholar]
- Addabbo, P.; Han, S.; Biondi, F.; Giunta, G.; Orlando, D. Adaptive radar detection in the presence of multiple alternative hypotheses using Kullback-Leibler information criterion-part i: Detector designs. IEEE Trans. Signal Process. 2021, 69, 3730–3741. [Google Scholar] [CrossRef]
- Lai, Y.-K. Foreign object debris detection method based on fractional Fourier transform for millimeter-wave radar. J. Appl. Remote Sens. 2020, 14, 016508. [Google Scholar] [CrossRef]
- Salem, A.I.; Hafez, A.E.-D.S.; Amar, A.S. Intelligent Adaptive CFAR for Radar Signal Processing. In Proceedings of the 2021 International Telecommunications Conference (ITC-Egypt), Alexandria, Egypt, 13–15 July 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Sun, J.; Yu, J.; Peng, S. The Interference Effect of Jamming UAV Formation Anginst The Netted Radar. Electron. Inf. Warf. Technol. 2016, 3, 1–7. [Google Scholar]
- Zhao, G. Principle of Radar Countermeasure; Xidian University Publishing House: Xi’an, China, 2012. [Google Scholar]
- Zhao, Y.-L.; Wang, X.-S.; Wang, G.-Y.; Liu, Y.-H.; Luo, J. Tracking technique for radar network in the presence of multi-range-false-target deception jamming. Acta Electon. Sin. 2007, 35, 454. [Google Scholar]
- He, X.; Liao, K.; Peng, S.; Tian, Z.; Huang, J. Interrupted-Sampling Repeater Jamming-Suppression Method Based on a Multi-Stages Multi-Domains Joint Anti-Jamming Depth Network. Remote Sens. 2022, 14, 3445. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, C.; Shi, Q.; Huang, J.; Yuan, N. A study on finite false target jamming for radar track generation. In Proceedings of the International Conference on Electronic Information Engineering and Data Processing (EIEDP 2023), Nanchang, China, 17–19 March 2023; SPIE: Bellingham, WA, USA, 2023; pp. 427–432. [Google Scholar]
- Zhou, Q.-H.; Jin, X.-M. A method for producing dense false-signal. Inf. Electron. Eng. 2010, 8, 261–264. [Google Scholar]
- Song, C.; Wang, Y.; Jin, G.; Wang, Y.; Dong, Q.; Wang, B.; Zhou, L.; Lu, P.; Wu, Y. A Novel Jamming Method against SAR Using Nonlinear Frequency Modulation Waveform with Very High Sidelobes. Remote Sens. 2022, 14, 5370. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiu, B.; Wang, P.; Liu, H.; Liang, S. An end-to-end anti-jamming target detection method based on CNN. IEEE Sens. J. 2021, 21, 21817–21828. [Google Scholar] [CrossRef]
- Chua, M.Y.; Koo, V.C.; Lim, H.S.; Sumantyo, J.T.S. Phase-coded stepped frequency linear frequency modulated waveform synthesis technique for low altitude ultra-wideband synthetic aperture radar. IEEE Access 2017, 5, 11391–11403. [Google Scholar] [CrossRef]
- Su, W.-C.; Tang, M.-C.; El Arif, R.; Horng, T.-S.; Wang, F.-K. Stepped-frequency continuous-wave radar with self-injection-locking technology for monitoring multiple human vital signs. IEEE Trans. Microw. Theory Tech. 2019, 67, 5396–5405. [Google Scholar] [CrossRef]
- Zhai, W.; Zhang, Y. Application of super-SVA to stepped-chirp radar imaging with frequency band gaps between subchirps. Prog. Electromagn. Res. B 2011, 30, 71–82. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, Y.-Q. Aspects of radar imaging using frequency-stepped chirp signals. EURASIP J. Adv. Signal Process. 2006, 2006, 1–8. [Google Scholar] [CrossRef]
- Deng, Y.; Zheng, H.; Wang, R.; Feng, J.; Liu, Y. Internal calibration for stepped-frequency chirp SAR imaging. IEEE Geosci. Remote Sens. Lett. 2011, 8, 1105–1109. [Google Scholar] [CrossRef]
- Dubrovinskaya, E.; Kebkal, V.; Kebkal, O.; Kebkal, K.; Casari, P. Underwater localization via wideband direction-of-arrival estimation using acoustic arrays of arbitrary shape. Sensors 2020, 20, 3862. [Google Scholar] [CrossRef]
- Sifa, H.; Smith, T. Localized Optimization and Effectiveness Analysis of Medium PRF Airborne Pulse Doppler Radars in the Turkish Air Force. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2011. [Google Scholar]
- Van Veen, B.D.; Buckley, K.M. Beamforming: A versatile approach to spatial filtering. IEEE Assp Mag. 1988, 5, 4–24. [Google Scholar] [CrossRef]
- Ji, J.; Jiang, J.; Al-Armaghany, A.; Xue, F.; Huang, P. Active cancellation method of the chirp-subpulse stepped frequency (CSSF) based on repeater jamming. Optik 2018, 154, 692–704. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, X.; Yang, Q.; Ye, L.; Zhao, M. Performance bound for joint multiple parameter target estimation in sparse stepped-frequency radar: A comparison analysis. Sensors 2019, 19, 2002. [Google Scholar] [CrossRef]
- Dai, G.; Huan, S.; Zhang, L. Integrating Agile Waveforms with DBF for HRWS SAR Imagery and Adaptive Jamming Suppression. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 4080–4095. [Google Scholar] [CrossRef]
- Lan, L.; Xu, J.; Liao, G.; Zhu, S.; So, H.C. Mainlobe deceptive jammer suppression in SF-RDA radar: Joint transmit-receive processing. IEEE Trans. Veh. Technol. 2022, 71, 12602–12616. [Google Scholar] [CrossRef]
- Zhu, Y.; Zhang, Z.; Wang, X.; Li, B.; Liu, W.; Chen, H. A Method for Suppressing False Target Jamming with Non-Uniform Stepped-Frequency Radar. Electronics 2023, 12, 2534. [Google Scholar] [CrossRef]
- Gao, A.; Zou, N.; Dai, P.; Lu, N.; Li, T.; Wang, Y.; Zhao, J.; Mao, H. Signal-to-noise ratio enhancement of silicon nanowires biosensor with rolling circle amplification. Nano Lett. 2013, 13, 4123–4130. [Google Scholar] [CrossRef]
- Musumeci, L.; Dovis, F.; Silva, J.S.; da Silva, P.F.; Lopes, H.D. Design of a High Sensitivity GNSS receiver for Lunar missions. Adv. Space Res. 2016, 57, 2285–2313. [Google Scholar] [CrossRef]
- Zhang, L.; Xing, M.; Qiu, C.-W.; Li, J.; Sheng, J.; Li, Y.; Bao, Z. Resolution enhancement for inversed synthetic aperture radar imaging under low SNR via improved compressive sensing. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3824–3838. [Google Scholar] [CrossRef]
- Crisp, D.J. The State-of-the-Art in Ship Detection in Synthetic Aperture Radar Imagery. Environ. Sci. 2004, 126746705. [Google Scholar]
- Felguera-Martín, D.; González-Partida, J.-T.; Almorox-González, P.; Burgos-García, M. Vehicular traffic surveillance and road lane detection using radar interferometry. IEEE Trans. Veh. Technol. 2012, 61, 959–970. [Google Scholar] [CrossRef]
- Barton, D.K. Radar System Analysis and Modeling; Artech House: Norwood, MA, USA, 2004. [Google Scholar]
- Chen, X.; Hu, M.; Lu, S. Modelling and analysis of constant false alarm rate performance in presence of jamming environments. Math. Probl. Eng. 2022, 2022, 3780252. [Google Scholar] [CrossRef]
- Li, T.; Wang, Z.; Liu, J. Evaluating Effect of Blanket Jamming on Radar Via Robust Time-Frequency Analysis and Peak to Average Power Ratio. IEEE Access 2020, 8, 214504–214519. [Google Scholar] [CrossRef]
- Wang, P.; Meng, H.; Xiqin, W. Suppressing autocorrelation sidelobes of LFM pulse trains with genetic algorithm. Tsinghua Sci. Technol. 2008, 13, 800–806. [Google Scholar] [CrossRef]
- Feng, D.; Tao, H.; Yang, Y.; Liu, Z. Jamming de-chirping radar using interrupted-sampling repeater. Sci. China Inf. Sci. 2011, 54, 2138–2146. [Google Scholar] [CrossRef]
- Costanzo, S.; Spadafora, F.; Borgia, A.; Moreno, H.; Costanzo, A.; DiMassa, G. High resolution software defined radar system for target detection. J. Electr. Comput. Eng. 2013, 2013, 7. [Google Scholar]
- Yang, J.; Zhang, Y. A novel sparse stepped chaotic signal and its compression based on compressive sensing. Prog. Electromagn. Res. 2013, 137, 335–357. [Google Scholar] [CrossRef]
- Wu, T.; Li, Y.; Zhang, X.; Huang, Y.; Gu, Q.; Fu, C. DOA Estimation of Two-Dimensional Coherently Distributed Sources Based on Spatial Smoothing of Uniform Rectangular Arrays. Int. J. Antennas Propag. 2019, 2019, 1–12. [Google Scholar] [CrossRef]
- Zheng, Z.; Huang, Y.; Wang, W.-Q.; So, H.C. Direction-of-arrival estimation of coherent signals via coprime array interpolation. IEEE Signal Process. Lett. 2020, 27, 585–589. [Google Scholar] [CrossRef]
- Lu, S.; Ban, Y.; Zhang, X.; Yang, B.; Liu, S.; Yin, L.; Zheng, W. Adaptive control of time delay teleoperation system with uncertain dynamics. Front. Neurorobotics 2022, 16, 928863. [Google Scholar] [CrossRef]
- Tian, H.; Huang, N.; Niu, Z.; Qin, Y.; Pei, J.; Wang, J. Mapping winter crops in China with multi-source satellite imagery and phenology-based algorithm. Remote Sens. 2019, 11, 820. [Google Scholar] [CrossRef]
- Tian, H.; Pei, J.; Huang, J.; Li, X.; Wang, J.; Zhou, B.; Qin, Y.; Wang, L. Garlic and winter wheat identification based on active and passive satellite imagery and the google earth engine in northern china. Remote Sens. 2020, 12, 3539. [Google Scholar] [CrossRef]
- Zhou, D.; Sheng, M.; Li, J.; Han, Z. Aerospace Integrated Networks Innovation for Empowering 6G: A Survey and Future Challenges. IEEE Commun. Surv. Tutor. 2023, 25, 975–1019. [Google Scholar] [CrossRef]
- Zhou, G.; Zhou, X.; Song, Y.; Xie, D.; Wang, L.; Yan, G.; Hu, M.; Liu, B.; Shang, W.; Gong, C. Design of supercontinuum laser hyperspectral light detection and ranging (LiDAR)(SCLaHS LiDAR). Int. J. Remote Sens. 2021, 42, 3731–3755. [Google Scholar] [CrossRef]
- Han, Y.; Wang, B.; Guan, T.; Tian, D.; Yang, G.; Wei, W.; Tang, H.; Chuah, J.H. Research on road environmental sense method of intelligent vehicle based on tracking check. IEEE Trans. Intell. Transp. Syst. 2022, 24, 1261–1275. [Google Scholar] [CrossRef]
- Jiang, Y.; Li, X. Broadband cancellation method in an adaptive co-site interference cancellation system. Int. J. Electron. 2022, 109, 854–874. [Google Scholar] [CrossRef]
- Lu, S.; Ding, Y.; Liu, M.; Yin, Z.; Yin, L.; Zheng, W. Multiscale feature extraction and fusion of image and text in VQA. Int. J. Comput. Intell. Syst. 2023, 16, 54. [Google Scholar] [CrossRef]
- Zhou, G.; Deng, R.; Zhou, X.; Long, S.; Li, W.; Lin, G.; Li, X. Gaussian inflection point selection for LiDAR hidden echo signal decomposition. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Zhou, G.; Li, W.; Zhou, X.; Tan, Y.; Lin, G.; Li, X.; Deng, R. An innovative echo detection system with STM32 gated and PMT adjustable gain for airborne LiDAR. Int. J. Remote Sens. 2021, 42, 9187–9211. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, B.; Liu, Y.; Niu, Z.; Fan, Y.; Chen, X. A D-band manifold triplexer with high isolation utilizing novel waveguide dual-mode filters. IEEE Trans. Terahertz Sci. Technol. 2022, 12, 678–681. [Google Scholar] [CrossRef]
- Li, S.; Chen, H.; Chen, Y.; Xiong, Y.; Song, Z. Hybrid Method with Parallel-Factor Theory, a Support Vector Machine, and Particle Filter Optimization for Intelligent Machinery Failure Identification. Machines 2023, 11, 837. [Google Scholar] [CrossRef]
- Lu, S.; Liu, M.; Yin, L.; Yin, Z.; Liu, X.; Zheng, W. The multi-modal fusion in visual question answering: A review of attention mechanisms. PeerJ Comput. Sci. 2023, 9, e1400. [Google Scholar] [CrossRef]
- Xu, B.; Guo, Y. A novel DVL calibration method based on robust invariant extended Kalman filter. IEEE Trans. Veh. Technol. 2022, 71, 9422–9434. [Google Scholar] [CrossRef]
- Xu, K.-D.; Guo, Y.-J.; Liu, Y.; Deng, X.; Chen, Q.; Ma, Z. 60-GHz compact dual-mode on-chip bandpass filter using GaAs technology. IEEE Electron. Device Lett. 2021, 42, 1120–1123. [Google Scholar] [CrossRef]
- Jiang, S.; Zhao, C.; Zhu, Y.; Wang, C.; Du, Y. A practical and economical ultra-wideband base station placement approach for indoor autonomous driving systems. J. Adv. Transp. 2022, 2022, 3815306. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, S.; Li, M.; Zhao, N.; Wu, M. A new adaptive co-site broadband interference cancellation method with auxiliary channel. Digit. Commun. Netw. 2022. [Google Scholar] [CrossRef]
- Li, A.; Masouros, C.; Swindlehurst, A.L.; Yu, W. 1-bit massive MIMO transmission: Embracing interference with symbol-level precoding. IEEE Commun. Mag. 2021, 59, 121–127. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Wang, C.; Liang, Y.; Yang, S.; Wang, L.; Wang, S. Digital twin-driven industrialization development of underwater gliders. IEEE Trans. Ind. Inform. 2023, 19, 9680–9690. [Google Scholar] [CrossRef]
- Li, B.; Tan, Y.; Wu, A.-G.; Duan, G.-R. A distributionally robust optimization based method for stochastic model predictive control. IEEE Trans. Autom. Control 2021, 67, 5762–5776. [Google Scholar] [CrossRef]
- Ma, S.; Qiu, H.; Yang, D.; Wang, J.; Zhu, Y.; Tang, B.; Sun, K.; Cao, M. Surface multi-hazard effect of underground coal mining. Landslides 2023, 20, 39–52. [Google Scholar] [CrossRef]
- Shao, Z.; Zhai, Q.; Guan, X. Physical-model-aided data-driven linear power flow model: An approach to address missing training data. IEEE Trans. Power Syst. 2023, 38, 2970–2973. [Google Scholar] [CrossRef]
- Yang, M.; Wang, Y.; Liang, Y.; Wang, C. A new approach to system design optimization of underwater gliders. IEEE/ASME Trans. Mechatron. 2022, 27, 3494–3505. [Google Scholar] [CrossRef]
- Li, A.; Masouros, C.; Vucetic, B.; Li, Y.; Swindlehurst, A.L. Interference exploitation precoding for multi-level modulations: Closed-form solutions. IEEE Trans. Commun. 2020, 69, 291–308. [Google Scholar] [CrossRef]
- Qian, L.; Zheng, Y.; Li, L.; Ma, Y.; Zhou, C.; Zhang, D. A new method of inland water ship trajectory prediction based on long short-term memory network optimized by genetic algorithm. Appl. Sci. 2022, 12, 4073. [Google Scholar] [CrossRef]
- Yin, L.; Wang, L.; Li, T.; Lu, S.; Yin, Z.; Liu, X.; Li, X.; Zheng, W. U-Net-STN: A Novel End-to-End Lake Boundary Prediction Model. Land 2023, 12, 1602. [Google Scholar] [CrossRef]
- Zheng, Y.; Lv, X.; Qian, L.; Liu, X. An optimal bp neural network track prediction method based on a ga–aco hybrid algorithm. J. Mar. Sci. Eng. 2022, 10, 1399. [Google Scholar] [CrossRef]
- Cheng, B.; Wang, M.; Zhao, S.; Zhai, Z.; Zhu, D.; Chen, J. Situation-aware dynamic service coordination in an IoT environment. IEEE/ACM Trans. Netw. 2017, 25, 2082–2095. [Google Scholar] [CrossRef]
- Li, R.; Zhang, H.; Chen, Z.; Yu, N.; Kong, W.; Li, T.; Wang, E.; Wu, X.; Liu, Y. Denoising method of ground-penetrating radar signal based on independent component analysis with multifractal spectrum. Measurement 2022, 192, 110886. [Google Scholar] [CrossRef]
- Yao, Y.; Shu, F.; Li, Z.; Cheng, X.; Wu, L. Secure Transmission Scheme Based on Joint Radar and Communication in Mobile Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2023, 24, 10027–10037. [Google Scholar] [CrossRef]
- Zhao, J.; Gao, F.; Jia, W.; Yuan, W.; Jin, W. Integrated Sensing and Communications for UAV Communications with Jittering Effect. IEEE Wirel. Commun. Lett. 2023, 12, 758–762. [Google Scholar] [CrossRef]
- Zheng, Y.; Liu, P.; Qian, L.; Qin, S.; Liu, X.; Ma, Y.; Cheng, G. Recognition and depth estimation of ships based on binocular stereo vision. J. Mar. Sci. Eng. 2022, 10, 1153. [Google Scholar] [CrossRef]
- Tai, N.; Xu, X.; Han, H. Step-wave frequency modulation jamming method against LFM signal. J. Terahertz Sci. Electron. Inf. Technol. 2019, 17, 871–876. [Google Scholar]
- Sun, J.; Wang, C.; Shi, Q.; Ren, W.; Yao, Z.; Yuan, N. Intelligent optimization methods of phase-modulation waveform. J. Syst. Eng. Electron. 2022, 33, 916–923. [Google Scholar] [CrossRef]
- Shi, L.; Zhou, Y.; Li, D.; Wang, X.; Xiao, S. Multi-false-target jamming effects on the LFM pulsed radar’s CFAR detection. J. Syst. Eng. Electron 2005, 27, 818–822. [Google Scholar]
- Grover, K.; Lim, A.; Yang, Q. Jamming and anti–jamming techniques in wireless networks: A survey. Int. J. Ad Hoc Ubiquitous Comput. 2014, 17, 197–215. [Google Scholar] [CrossRef]
- Yu, M.; Dong, S.; Duan, X.; Liu, S. A novel interference suppression method for interrupted sampling repeater jamming based on singular spectrum entropy function. Sensors 2019, 19, 136. [Google Scholar] [CrossRef] [PubMed]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Delay Superimposed Forwarding Jamming | Delay Superposition Step-Wave Frequency Modulation Repeater Jamming | Without Jamming Conditions | |
|---|---|---|---|
| Real target detection probability | 0.0096 | 0 | 1.0 |
| Edge false-target detection probability | 0.02 | 0.01 |
| Delay Superimposed Forwarding Jamming | Delay Superposition Step-Wave Frequency Modulation Repeater Jamming | |
|---|---|---|
| Real target detection probability | 0.8702 | 0.0029 |
| Edge false-target detection probability | 0.057 | 0.0006 |
| Delay Superimposed Forwarding Jamming | Delay Superposition Step-Wave Frequency Modulation Repeater Jamming | |
|---|---|---|
| Real target detection probability | 0.8897 | 0.0471 |
| Edge false-target detection probability | 0.057 | 0.00059 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Wang, C.; Shi, Q.; Huang, J.; Yuan, N. Advancing Stepped-Waveform Radar Jamming Techniques for Robust False-Target Generation against LFM-CFAR Systems. Sensors 2023, 23, 7782. https://doi.org/10.3390/s23187782
Wang Y, Wang C, Shi Q, Huang J, Yuan N. Advancing Stepped-Waveform Radar Jamming Techniques for Robust False-Target Generation against LFM-CFAR Systems. Sensors. 2023; 23(18):7782. https://doi.org/10.3390/s23187782
Chicago/Turabian StyleWang, Yanqi, Chao Wang, Qingzhan Shi, Jingjian Huang, and Naichang Yuan. 2023. "Advancing Stepped-Waveform Radar Jamming Techniques for Robust False-Target Generation against LFM-CFAR Systems" Sensors 23, no. 18: 7782. https://doi.org/10.3390/s23187782
APA StyleWang, Y., Wang, C., Shi, Q., Huang, J., & Yuan, N. (2023). Advancing Stepped-Waveform Radar Jamming Techniques for Robust False-Target Generation against LFM-CFAR Systems. Sensors, 23(18), 7782. https://doi.org/10.3390/s23187782